;о
00 С71 00
Изобретение относится к гидромеханизации, а именно к средствам управления землесосными снарядами.
Цель изобретения - повышение точности управления земснарядом.
На фиг. I изображена схема устройства совместно с гидротранспортной системой; на фиг. 2 - схема регулятора управления становой лебедки; на фиг. 3 - вариант технической реализации элемента задержки; на фиг. 4, 5 - характеристики работы устройства.
Устройство автоматизированного управления земснарядом совместно с гидротранспортной системой (ГС) (фиг. 1) содержит корпус землесоса 1, дизель 2, грунтовый на- сое 3, всасывающую часть ГС 4, нагнетательную часть ГС 5, вакуумметр 6, манометр 7, становую лебедку 8, электродвигатель становой лебедки 9, тиристорный преобразователь 10, датчик 11 нагрузки электро- привода становой лебедки (ЭПСЛ), регулятор 12 управления становой лебедки, включающий в себя блок 13 управления грунтозабором, блок 14 управления всасывающей способностью (первый блок управления), блок 15 управления нагнетательной способностью (второй блок управления) первый и второй блоки 16, 17 выбора наибольшего сигнала, сумматор 18 и задатчик 19 частоты вращения, а также задатчик 20 частоты вращения в ручном режиме, ключи 21, 22. К всасывающей части 4 грунтового насоса подключен вакуумметр 6, к нагнетательной части 5 - манометр 7, выход вакуумметра 6 подключен к первому входу регулятора 12 управления становой лебедки, к второму входу которого подключен выход манометра 7, а к третьему - выход датчи- ка 11 нагрузки. Выход регулятора соединен через ключ 21, связан с тиристорным преобразователем 10 выход задатчика 20 частоты вращения в ручном режиме электродвигателя становой лебедки соединен также через ключ 22 с входом тиристорного преобразователя 10, параллельно выходам которого подключены последовательно соединенные датчик 11 нагрузки и якорная обмотка электродвигателя 9 становой лебедки, якорь которого механически соединен со становой лебедкой 8, установленной на палубе землесоса 1.
В регуляторе 12 управления становой лебедкой (фиг. 1) первый выход блока 14 управления всасывающей способностью соединен с первым (вычитающим) входом сумматора 18, а второй выход - с первым входом первого блока 16 выбора наибольшего сигнала, к второму входу которого подключен второй выход блока 15 управления нагнетательной способностью, первый выход которого соединен с вторым (вычитающим) входом сумматора 18. Выход первого блока выбора наибольшего сигнала 16 соединен с первым входом второго блока
выбора наибольшего сигнала 17. Третий вход регулятора управления становой лебедки через блок 13 управления грунтозабором соединен с вторым входом второго блока 17 выбора наибольшего сигнала, выход которого связан с третьим (вычитающим) входом сумматора 18. Четвертый суммирующий вход сумматора связан с задатчиком 19 частоты вращения, а выход сумматора связан с выходом регулятора.
Блок 13 управления грунтозабором (фиг. 2) содержит задатчик 23 нагрузки электропривода становой лебедки (ЭПСЛ), сумматор 24 и ячейку 25 задержки, при этом выход задатчика 23 нагрузки ЭПСЛ подключен к суммирующему входу сумматора 24, выход которого соединен с входом ячейки 25 задержки, выход которой является выходом блока 13 управления грунтозабором, а входом вычитающий вход сумматора 24.
Блок 14 управления всасывающей способностью (первый блок управления) (фиг. 2) содержит ключи 26, 27, ячейки 28, 31 памяти, ячейки 29, 32 коррекции, сумматоры 30, 33 и ячейку 34 задержки, при этом третий (вычитающий) вход сумматора 30, третий (вычитающий) вход сумматора 33 и подвижные контакты ключей 26, 27 объединены и соединены с входом блока 14 управления всасывающей способностью, неподвижный контакт 26 подключен к входу ячейки 28 памяти, выход которой связан с первым (суммирующим) входом сумматора 30, второй (вычитающий) вход которого связан с выходом ячейки 29 коррекции, неподвижный контакт ключа 27 соединен с входом ячейки 31 памяти, выход которой соединен с первым (суммирующим) входом сумматора 33, второй (вычитающий) вход которого связан с выходом ячейки коррекции 32, выход сумматора 33 соеди-нен с входом ячейки 34 задержки, при этом второй выходом блока 14 управления всасывающей способностью является выход сумматора 30, а первый - выход ячейки 34 задержки.
Блок 15 управления нагнетательной способностью, второй блок управления (фиг. 2) по структуре и связям между отдельными узлами совпадает полностью с блоком 14 управления всасывающей способностью и содержит ключи 35, 36, элементы 37, 40 памяти, ячейки 38, 41 коррекции, сумматоры 39, 42 и ячейку задержки 43.
Ячейка 25 (34 и 43) задержки (фиг. 3) содержит ключевой элемент 44, источник 45 регулируемого постоянного напряжения, компаратор 46, линию задержки 47, при этом выход источника 45 регулируемого постоянного напряжения соединен с вторым входом компаратора 46, выход которого соединен с входом линии задержки 47, выход линии задержки 47 подключен к второму управляющему входу ключевого элемента 44, первый
информационный вход которого связан с первым входом компаратора 46 и входом ячей- кн задержки. Выход ключа 44 соединен с выходом ячейки задержки.
Управление производительностью землесоса может осуществляться как в ручном режиме работы, так и в автоматическом, при этом целевая функция управления заключается в том, чтобы землесос работал в областях максимальной производительности по грунту. При работе в ручном режиме оператор замыкает ключ 22 и с помощью задатчика 20 частоты вращения в ручном режиме управляет значениями выходного напряжения тиристорного преобразователя 10, частоты вращения электродвигателя 9 становой лебедки 8 и скоростью перемещения корпуса 1 землесоса вместе с всасывающей частью 4 гидротранспортной системы относительно грунта, подлежащего разработке, извлечению и гидротранспортированию.
Для работы устройства в автоматическом режиме, оператор замыкает (включает) ключ 21. При этом ГС может находиться в любой из областей работы, входящих в состав области рабочих режимов РР (фиг. 4). Если в ГС поступает мало грунта земснаряд работает в области малопроизводительных режимов. Информационные сигналы о значениях фактических потерь напора во всасывающей и нагнетательной частях грунтопровода в виде напряжений с выходов вакуумметра и манометр 7-UH поступают на первые входы соответствующих блоков 14 управления всасывающей способностью ГС и блоков 15 управления нагнетательной способностью (фиг. 2). Сигнал с выхода вакуумметра 6 поступает на третьи (вычитающие) входы сумматоров 30 и 33. На первый-(суммирующий) вход сумматора 30 подается сигнал Ja.o с выхода ячейки 28 памяти, а на второй (вычитающий) вход сигнала AUei с выхода ячейки 29 коррекции. Сигнал на выходе сумматора 30 появляется только тогда, когда Uu LUeo+ +AUei).
На первый (суммирующий) вход сумматора 33 подается сигнал UBM с выхода ячейки 31 памяти, а на второй (вычитающий) вход сумматора 33 - сигнал Див2 с выхода ячейки 32 коррекции. Сигнал на выходе сумматора 33 появится только тогда, когда
UeM(UB.).
Аналогично, сигнал U. поступает с выхода датчика 7 давления на третьи (вычитающие) входы суммирующих сумматоров 39 и 42. На первый (суммирующий) вход сумматора 39 подается сигнал UHO.C выхода ячейки 37 памяти, а на второй (вычитающий) вход - сигнал AUwi с выхода
ячейки 38 коррекции. Сигнал на выходе сумматора 39 появляется только тогда, когда
и„.т (UH.O+AUHI)
5
На первый (суммирующий) вход сумматора 42 подается сигнал UH« с выхода ячейки 40 памяти, а на второй (вычитающий) вход - сигнал ДУно с выхода ячейки 41 Q коррекции. Сигнал на выходе сумматора 42 появится только тогда, когда
и„.к(ин.Аи„2)
Выходные сигналы сумматоров 30, 39 по5 даются соответственно на первый и второй входы первого блока выбора наибольщего сигнала 16.
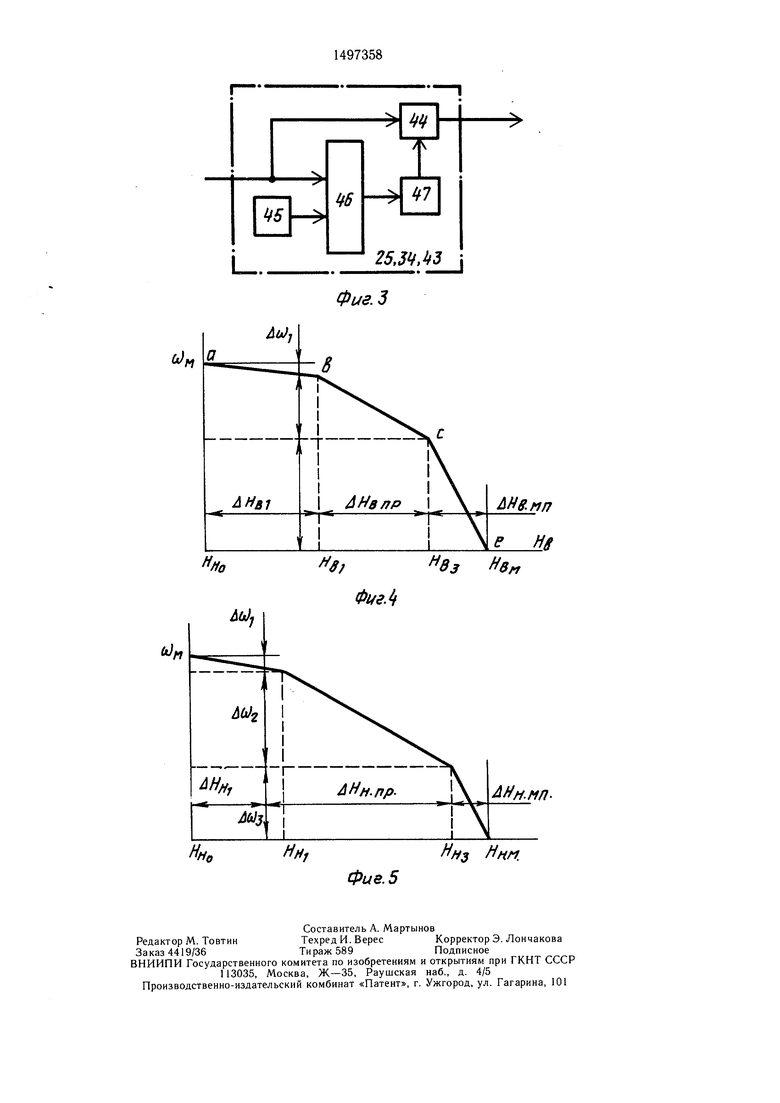
Когда UeT(U8o +Аиы) и UK. (Ueo -f -fAUMi) на входы первого блока 16 выде- ления наибольщего сигнала с выходов сумматоров 30 и 39 сигналы не поступают и выходной сигнал первого блока 16 выделения наибольшего сигнала также отсутствует. В этом режиме работы сигнал управления тиристорным преобразователем 10, по5 ступающий с выхода сумматора 18, является наибольшим, и определяется только значением сигнала с выхода задатчика 20 частоты вращения. Скорость рабочего перемещения землесоса пропорциональна частоте вращения электродвигателя 9, работающего
0 на участке аЬ своей электромеханической характеристики (фиг. 4, 5). При такой скорости перемещения землесоса в его ГС начинает поступать большее количество грунта. Возрастают потери напора во всасывающей и нагнетательной частях грунтопровода. Про5
порционально этому увеличиваются и сигналы с вакуумметра 6 и манометра 7. В этих режимах работы гидротранспортной системы с помощью блока 16 осуществляется выделение наибольшего по величине сигнала,
0 поступающих с выхода сумматора 39 блока 15 и 30 управления нагнетательной способностью и блока 14 управления всасывающей способностью и частота вращения электродвигателя 9 и интенсивность грун- тозабора и гидротранспортирования грунта
5 пропорциональна разности сигналов, поступающих с задатчика 19 частоты вращения и выходного сигнала второго блока 17 выделения наибольшего сигнала. Электродвигатель 8 становой лебедки 9 начинает работать на одном из участков be электромеха0 нической характеристики (фиг. 4, 5), а ГС - в области производительных режимов. При дальнейшем росте потерь напора до значений, превышающих HBI и HHI, ГС начинает функционировать в субоптимальной по про5 изводительности области работы.
При интенсивном увеличении количества грунта, поступающего в ГС, увеличиваются потери напора, величина которых начинает превышать Нвз или Нш, ГС приближается к границе устойчивого режима работы. Когда фактические потери напора во всасывающей части ГС становятся больше Нвз, то на выходе сумматора 33 появляется сигнал, поступающий на вход ячейки задержки 34 управляющего сигнала. Если продолжительность действия выходного нала сумматора 33 превыщает значение постоянной времени линии задержки 47, фиг. 3, срабатывает ключ 44, подключающий выход усилителя 33 с вторым входом усилителя 18. Электродвигатель переходит работать на участок се (фиг. 4) элекромеханической характеристики. Аналогично, когда фактические потери напора в нагнетательной части ГС становятся больше Низ, на выходе сумматора 42 появляется сигнал, поступающий на вход ячейки 43 задержки управляющего сигнала. Если продолжительность действия выходного сигнала сумматора 42 превыщает значение постоянной времени линии задержки 47 (фиг. 3), срабатывает ключ 44, подключающий выход сумматора 42 к второму входу сумматора 18. Электродвигатель начинает работать на участке се характеристики (фиг. 5).
Когда значение потерь напора во всасывающей нагнетательной частях ГС приближается к максимальным и достигает или Н„и1, земснаряд останавливается, чтобы предотвратить возможность перехода ГС в неустойчивую область работы.
Если в процессе разработки и извлечения грунта появляется ограничение по грун- тозабору, которое выражается в росте тягового усилия становой лебедки, сигнал с выхода датчика нагрузки 11, поступающий на вход сумматора 24, становится больше выходного сигнала задатчика 23 нагрузки ЭПСЛ, на выходе сумматора 24 появляется сигнал. Если продолжительность действия выходного сигнала сумматора 24 превышает значение постоянной времени линии задержки 47 (фиг. 3), срабатывает ключ 44, подключающий выход сумматора 24 к второму входу второго блока 17 выхода наибольщего сигнала. Когда значение выходного сигнала сумматора 24 становится больше выходного сигнала первого блока 16 выбора наибольщего сигнала на третий вход сумматора 18 поступает сигнал, уменьшающий выходной сигнал задатчика 19. В этом режиме работы реализуется отрицательная обратная связь по току нагрузки ЭПСЛ, который переходит на работу по экскаваторной характеристике. Скорость перемещения землесоса уменьшается и осуществляется ограничение по грунтозабору на время действия перегрузки.
Формула изобретения
1. Устройство автоматизированного управления земснарядом, содержащее датчик вакуума и датчик давления, выходы которых соответственно подключены к первому и второму входам регулятора управления становой лебедки, привод становой лебедки, включающий тиристорный преобразователь и
электродвигатель, в якорную цепь которого включен датчик нагрузки, отличающееся тем, что, с целью повышения точности управления земснарядом, в него введены задатчик частоты вращения электродвигаQ теля в ручном режиме, два ключа, причем выход датчика нагрузки соединен с третьим входом регулятора управления становой лебедки, выход которого через первый ключ соединен с входом тиристорного преобразователя, а выход задатчика частоты вращения
5 в ручном режиме через второй ключ соединен с входом тиристорного преобразователя, причем регулятор управления становой лебедки содержит блок управления всасывающей способностью и блок управления
Q нагнетательной способностью, блок управления грунтозабором, первый и второй блоки выбора наибольшего сигнала, сумматор и задатчик частоты вращения, при этом вход блока управления всасывающей способностью является первым входом регулято5 ра, а вход управления нагнетательной способностью вторым входом регулятора, при этом первый выход блока управления всасывающей способностью соединен с первым входом сумматора, а второй выход соединен с первым входом первого блока вы0 бора наибольщего сигнала, второй вход которого соединен с вторым выходом блока управления нагнетательной способностью, первый выход которого соединен с вторым входом сумматора, выход первого блока выбора наибольшего сигнала соединен с пер5 вым входом второго блока выбора наибольшего сигнала, третий вход регулятора через блок управления грунтозабора связан с вторым входом второго блока выбора наибольшего сигнала, выход которого соединен с тре0 тьим входом сумматора, четвертый вход которого подключен к задатчику вращения, а выход сумматора соединен с выходом регулятора.
2. Устройство по п. 1, отличающееся тем, что каждый блок управления регулятора со5 держит два ключа, две ячейки памяти, две ячейки коррекции, два сумматора, ячейку задержки, при этом вход блока управления связан через последовательно соединенные первый ключ и первую ячейку памяти с первым входом первого сумматора,
через последовательно соединенный второй ключ и вторую ячейку памяти с первым входом второго сумматора, вход блока управления связан с третьими входами первого и второго сумматоров, а второй вход
г первого сумматора связан с первой ячейкой коррекции, второй вход второго сумматора соединен с второй ячейкой коррекции, причем выход первого сумматора через ячейку задержки соединен с первым выходом блока
управления, а выход второго сумматора соединен с вторым выходом блока управления. 3. Устройство по п. 1, отличающееся тем, что блок управления грунтозабором содержит задатчик нагрузки, сумматор и ячейку задержки, при этом вход блока управления грунтозабором соединен с первым вычитающим входом сумматора, второй суммирующий вход которого соединен с задатчиком нагрузки, а выход через ячейку задержки соединен с выходом блока управления грун- тозабора.
4. Устройство по пп. 2 и 3, отличающееся тем, что ячейка задержки содержит ключ, источник регулируемого постоянного напряжения, компаратор, элемент задержки, при этом вход ячейки задержки соединен с первым входом ключа и первым входом компаратора, второй вход которого соединен с источником регулируемого постоянного напряжения, а выход компаратора через элемент задержки соединен с вторым управляющим входом ключа, выход которого соединен с выходом ячейки задержки.

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОТОЙ ЗЕМСНАРЯДА | 2010 |
|
RU2426838C1 |
| Устройство для автоматического управления землесосным снарядом | 1985 |
|
SU1382918A1 |
| Система для управляемого обрушения подводных забоев земснарядом | 1990 |
|
SU1789608A1 |
| Устройство управления процессом грунтозабора землесосного снаряда | 1989 |
|
SU1705494A1 |
| Регулятор управления режимом работы землесосного снаряда | 1986 |
|
SU1451223A1 |
| Система для управляемого обрушения забоев земснарядом | 1988 |
|
SU1587142A1 |
| Устройство для управления процессом грунтозабора землесосного снаряда | 1988 |
|
SU1555434A1 |
| Устройство для управления земснарядом | 1977 |
|
SU708020A1 |
| Устройство для управления гидромеханизированным добывающим комплексом | 1977 |
|
SU670693A1 |
| Устройство для контроля процесса грунтозабора землесосного снаряда | 1986 |
|
SU1320336A1 |

Изобретение относится к гидромеханизации, а именно к средствам управления земснарядом. Цель изобретения - повышение точности управления земснарядом. Для этого устройство снабжено задатчиком 20 частоты вращения электродвигателя 9 в ручном режиме, ключами 21 и 22, посредством которых тиристорный преобразователь (ТП) 10 подключается соответственно к выходу регулятора 12 управления становой лебедкой 8 или к задатчику 20. Регулятор 12 включает блоки управления (БУ) 14 и 15 всасывающей и нагнетательной способностями, блоки 16 и 17 выбора наибольшего сигнала, БУ 13 грунтозабором, задатчик 19 частоты вращения в автоматическом режиме и сумматор. Сигналы с вакуумметра 6 и монометра 7 поступают соответственно по БУ 14, 15. Сигнал с датчика нагрузки 11 поступает на вход БУ 13. Блоками 16, 17 осуществляется выделение с выходов БУ 13-15 наибольшего сигнала, который совместно с сигналами с блоков 15 и 14 поступает на вычитающие входы сумматора 18. На суммирующий вход сумматора 18 поступает сигнал с задатчика 19. Выход сумматора 18 является выходом регулятора 12 и подключается через ключ 21 к входу ТП 10 при работе в автоматическом режиме. В ручном режиме ТП 10 подключается к задатчику 20 частоты вращения. Устройство осуществляет поиск и запоминание границ областей максимальных по производительности режимов работы земснаряда. 3 з.п. ф-лы. 5 ил.
19
Фи2.2
Физ.З
(J
м
д;
II
I //5/7/0 I
%7
MS-nn
Лб
j Не.
п
Фlfг.
Мн.
| УСТРОЙСТВО для УПРАВЛЕНИЯ ПЛАВУЧИМ ЗЕМЛЕСОСНЫМСНАРЯДОМ | 0 |
|
SU340746A1 |
| кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Попов В | |||
| И., Терешкин Д | |||
| С | |||
| Электрооборудование и автоматика речных земснарядов | |||
| М.: Транспорт, 1980, с | |||
| Топливник с глухим подом | 1918 |
|
SU141A1 |
