Предпосылки создания изобретения
Область техники
[0001] Изобретение относится к автоматической исследовательской системе для непилотируемого судна и к способу автоматического исследования для непилотируемого судна, в частности - к автоматической исследовательской системе для непилотируемого судна и к способу автоматического исследования для непилотируемого судна, предназначенным для автоматического исследования условий под водой и на дне водоема путем обеспечения перемещения непилотируемого судна в некотором пространственном диапазоне.
Описание уровня техники
[0002] Для исследования условий под водой и на дне морей, озер, прудов и рек можно использовать непилотируемое судно с дистанционным управлением. Такое непилотируемое судно обычно оборудовано гидролокационной системой, которая испускает ультразвуковые волны в направлении дна водоема, улавливает ультразвуковые волны, отраженные от дна водоема и т.п., позволяя исследовать условия под водой и на дне.
[0003] Оператор управляет непилотируемым судном из удаленного места с целью исследования желательного дна водоема, как описано в нерассмотренной заявке на патент 2005-343391. Это позволяет легко исследовать условия под водой и на дне водоема даже в таких местах, как мелководья и узкие причальные области, которые не доступны для более крупных пилотируемых судов.
[0004] Как ясно из вышеизложенного, обычные непилотируемые суда могут легко использоваться для исследования условий под водой и на дне водоема даже в таких местах, как мелководья и узкие причальные области, вследствие того, что они управляются операторами. Однако они не способны выбирать маршруты для исследования и осуществлять исследования условий под водой и на дне водоема путем следования по этим маршрутам автоматически.
[0005] Целью настоящего изобретения является устранение недостатков, присущих известным техническим решениям, и создание автоматической исследовательской системы для непилотируемого судна и способа автоматического исследования для непилотируемого судна, обеспечивающих автоматическую генерацию маршрутов исследования и автоматическое исследование условий под водой и на дне водоема при движении по этому маршруту исследования.
Сущность изобретения
[0006] Согласно настоящему изобретению автоматическая исследовательская система для непилотируемого судна оборудована Глобальной системой определения местоположения (GPS), установленной на судне, для измерения текущего положения непилотируемого судна, блоком ввода реперной линии исследования, предназначенным для ввода реперной линии исследования для непилотируемого судна, и блоком генерации маршрутов исследования, предназначенным для генерации маршрутов исследования для непилотируемого судна относительно реперной линии исследования.
[0007] Блок управления перемещением управляет перемещением непилотируемого судна, сопоставляя его текущее положение, измеренное системой GPS, с маршрутом исследования, сгенерированным блоком генерации маршрутов исследования. Кроме того, он оборудован исследовательским блоком, предназначенным для исследования условий по меньшей мере под водой или на дне водоема, и запоминающим устройством, предназначенным для хранения данных об условиях по меньшей мере под водой или на дне водоема, исследованных исследовательским блоком, при этом запоминающее устройство запоминает данные об условиях по меньшей мере под водой или на дне водоема, исследованные исследовательским блоком.
[0008] Согласно настоящему изобретению автоматическая исследовательская система для непилотируемого судна оборудована системой GPS, установленной на борту непилотируемого судна и предназначенной для измерения текущего положения непилотируемого судна, устройством для хранения маршрута, предназначенным для хранения петлеобразного маршрута, по которому происходит фактическое перемещение судна, на основе информации GPS, и блоком генерации маршрутов исследования, предназначенным для генерации специфических маршрутов исследования с направлениями и интервалами, задаваемыми внутри хранимого петлеобразного маршрута.
[0009] Блок управления перемещением управляет перемещением непилотируемого судна, сопоставляя его текущее положение, измеренное системой GPS, с маршрутом исследования, сгенерированным блоком генерации маршрутов исследования. Кроме того, он оборудован исследовательским блоком для исследования условий по меньшей мере под водой или на дне водоема, и запоминающим устройством, предназначенным для хранения данных об условиях по меньшей мере под водой или на дне водоема, исследованных исследовательским блоком, при этом запоминающее устройство запоминает данные об условиях по меньшей мере под водой или на дне водоема, определенные исследовательским блоком.
[0010] Далее, согласно настоящему изобретению, способ автоматического исследования для непилотируемого судна включает ввод реперной линии исследования для установки маршрута исследования, генерацию множества маршрутов исследования путем смещения реперной линии исследования на фиксированный интервал, задание дистанций для множества маршрутов исследования и задание порядка перемещения для сгенерированных маршрутов исследования, перемещение непилотируемого судна согласно заданному порядку перемещения, исследование условий по меньшей мере под водой или на дне водоема в процессе перемещения и отображение и сохранение результатов исследования условий по меньшей мере под водой или на дне водоема, в результате которого происходит отображение и сохранение результатов исследования или условий под водой или на дне водоема.
[0011] Кроме того, согласно настоящему изобретению, способ автоматического исследования для непилотируемого судна включает ввод реперной линии исследования для генерации маршрута исследования, установку множества маршрутов исследования путем задания прямых линий, идущих с фиксированным интервалом и перпендикулярно линии исследования, которая формирует реперную линию исследования, определение дистанций для множества маршрутов исследования и задание порядка перемещения для сгенерированных маршрутов исследования, перемещение непилотируемого судна согласно заданному порядку перемещения, исследование условий по меньшей мере под водой или на дне водоема в процессе перемещения и отображение и сохранение результатов исследования условий по меньшей мере под водой ил и на дне водоема, в результате которого происходит отображение и сохранение результатов исследования условий под водой или на дне водоема.
[0012] Кроме того, согласно настоящему изобретению способ автоматического исследования для непилотируемого судна включает сохранение маршрута, фактически пройденного непилотируемым судном по петлеобразной траектории, генерацию маршрутов исследования с направлениями и интервалами, задаваемыми внутри сохраненного маршрута, перемещение непилотируемого судна согласно указанным маршрутам исследования, исследование условий по меньшей мере под водой или на дне водоема в процессе перемещения и отображение и сохранение результатов исследования условий по меньшей мере под водой или на дне водоема, в результате которого происходит отображение и сохранение условий под водой или на дне водоема.
[0013] Кроме того, согласно настоящему изобретению способ автоматического исследования для непилотируемого судна включает сохранение петлеобразного маршрута, сформированного путем ввода множества точек, генерацию маршрутов исследования с направлениями и интервалами, задаваемыми внутри указанного сохраненного маршрута, перемещение непилотируемого судна согласно указанным маршрутам исследования, исследование условий по меньшей мере под водой или на дне водоема в процессе перемещения и отображение и сохранение результатов исследования условий по меньшей мере под водой или на дне водоема, в результате которого происходит отображение и сохранение условий под водой или на дне водоема.
Краткое описание чертежей
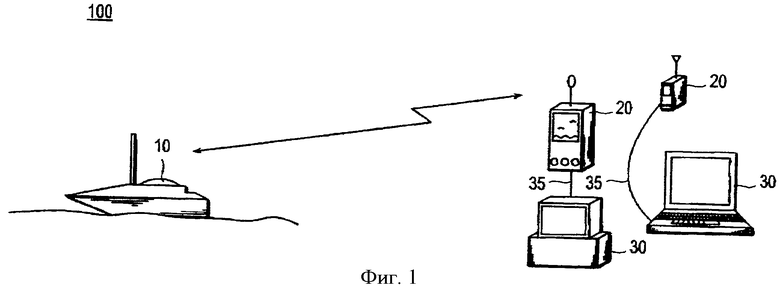
[0014] На фиг.1 показана принципиальная схема автоматической исследовательской системы для непилотируемого судна согласно настоящему изобретению.
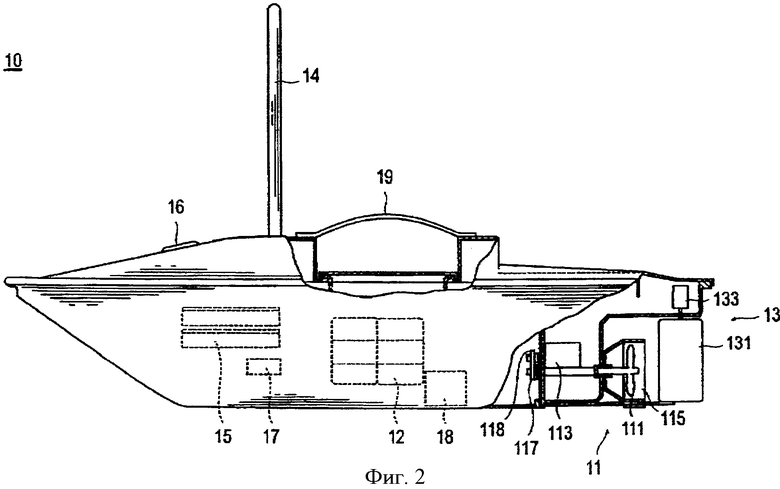
[0015] На фиг.2 показано продольное сечение непилотируемого судна.
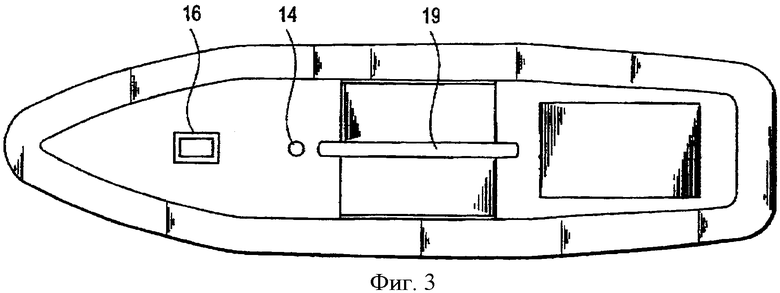
[0016] На фиг.3 показан вид сверху непилотируемого судна.
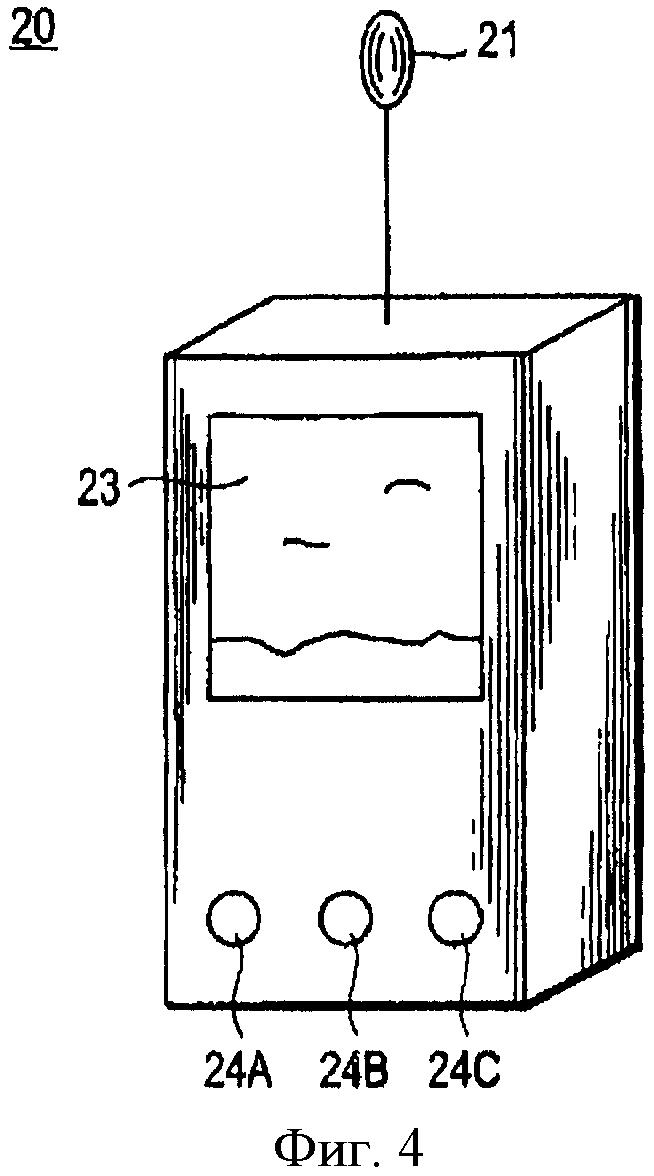
[0017] На фиг.4 показан внешний вид беспроводной управляющей системы.
[0018] На фиг.5 показана блок-схема непилотируемого судна и беспроводная управляющая система для первого варианта выполнения настоящего изобретения.
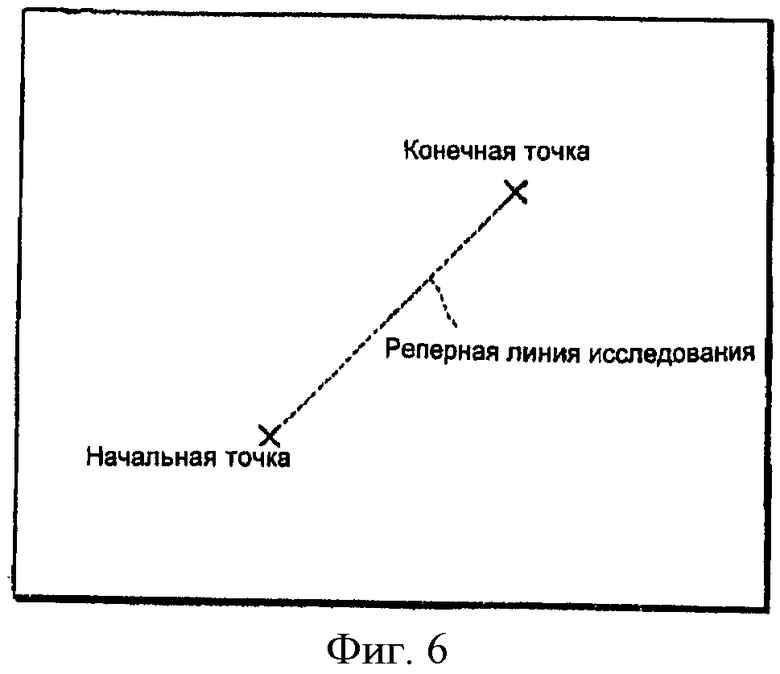
[0019] На фиг.6 показан пример реперной линии исследования для первого варианта выполнения настоящего изобретения.
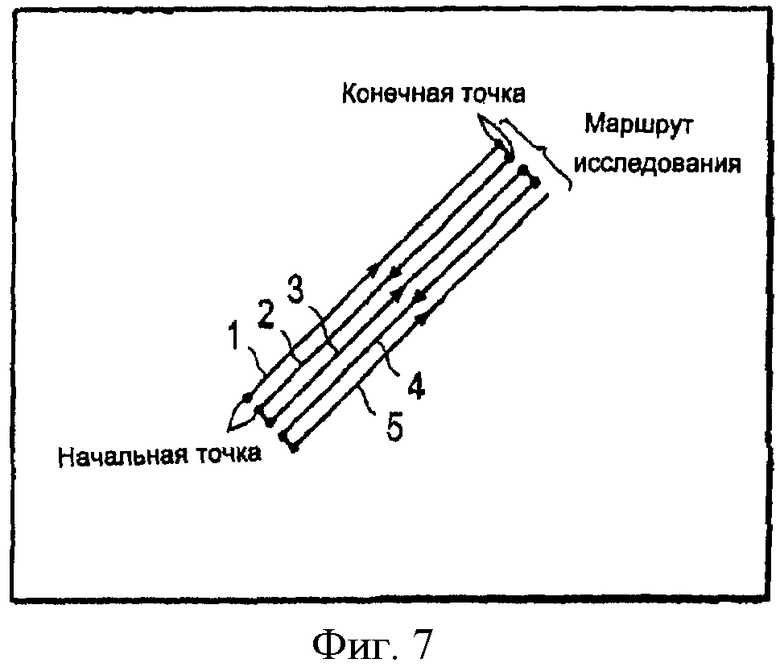
[0020] На фиг.7 показан пример маршрута исследования для первого варианта выполнения настоящего изобретения.
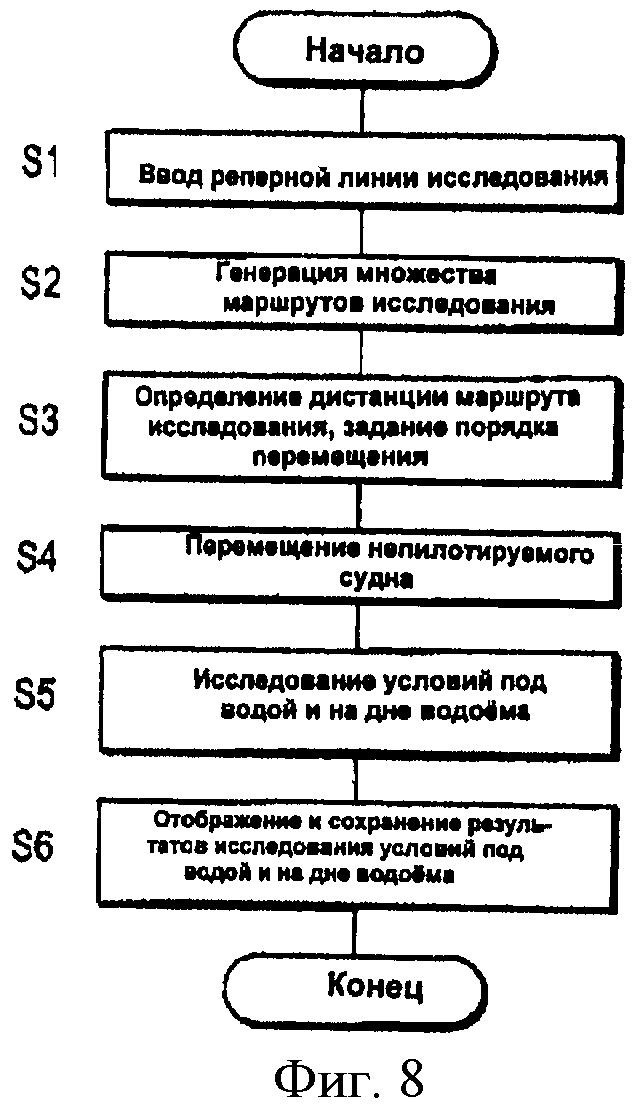
[0021] На фиг.8 показана последовательность операций при работе управляющей системы, показанной на фиг.5.
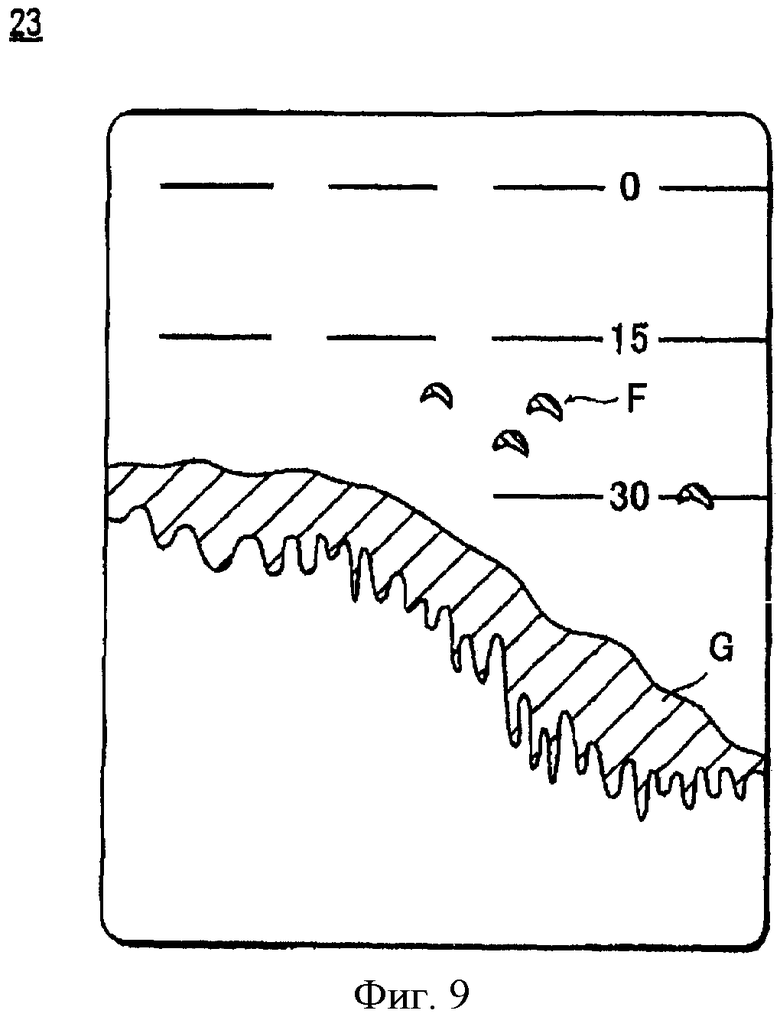
[0022] На фиг.9 показана диаграмма, иллюстрирующая пример изображения, созданного на основе данных исследования.
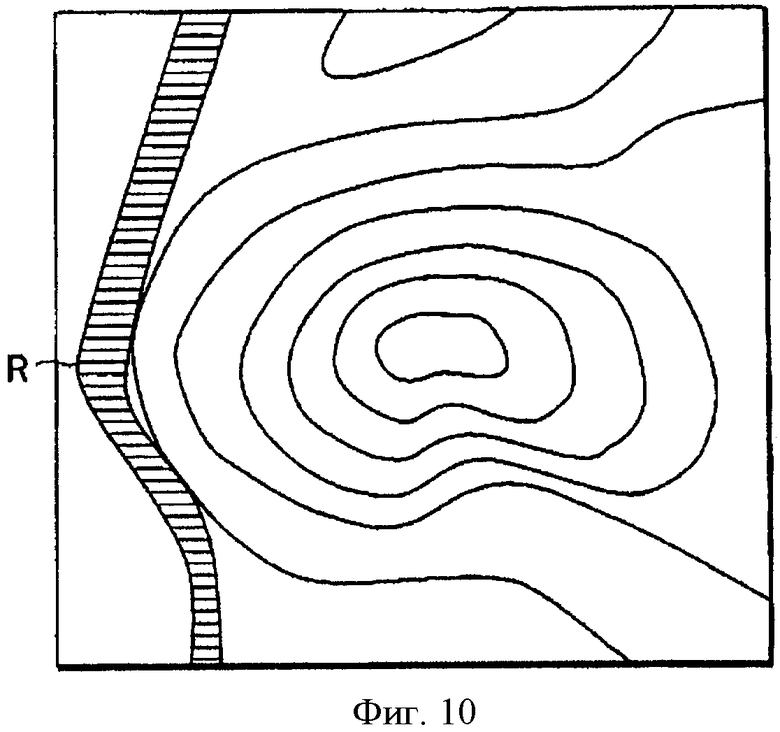
[0023] На фиг.10 показана диаграмма, иллюстрирующая пример изображения, полученного в результате исследования.
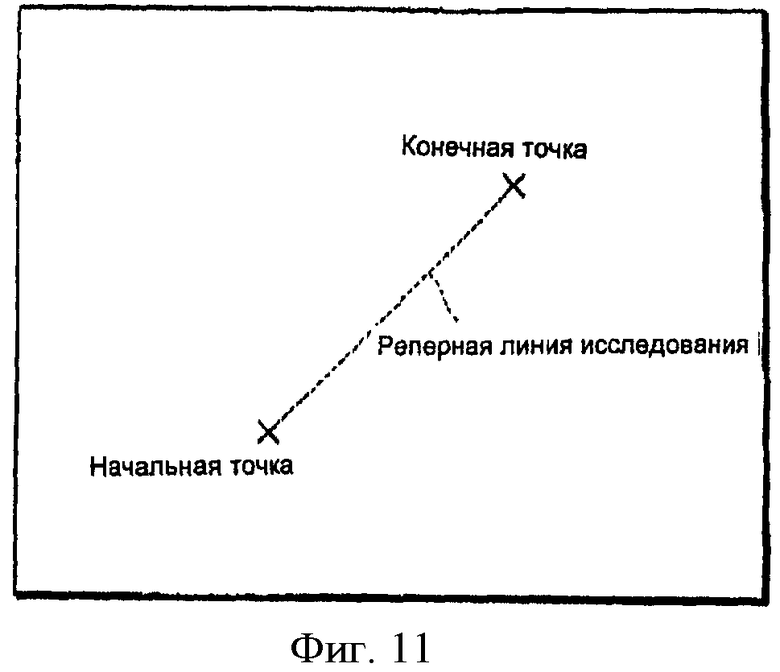
[0024] На фиг.11 показан пример реперной линии исследования для второго варианта выполнения настоящего изобретения.
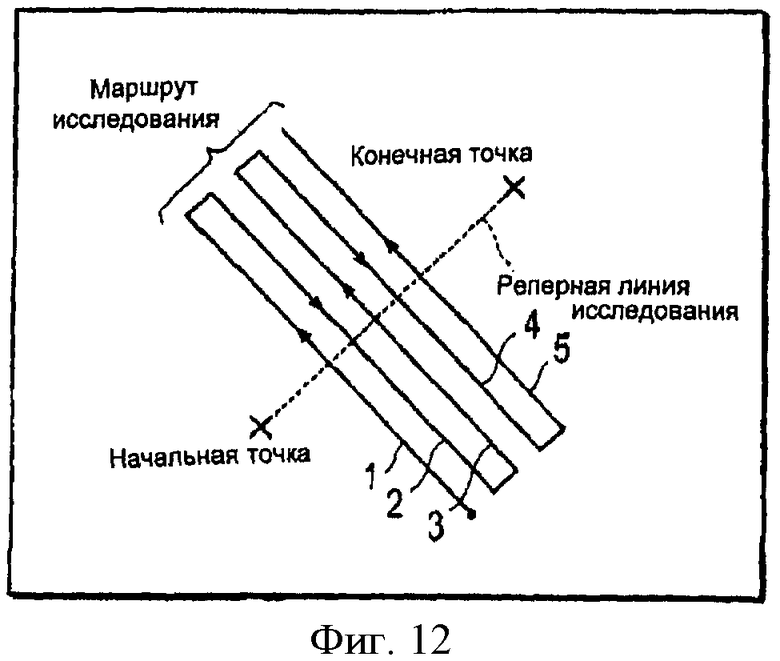
[0025] На фиг.12 показан пример маршрута исследования для второго варианта выполнения настоящего изобретения.
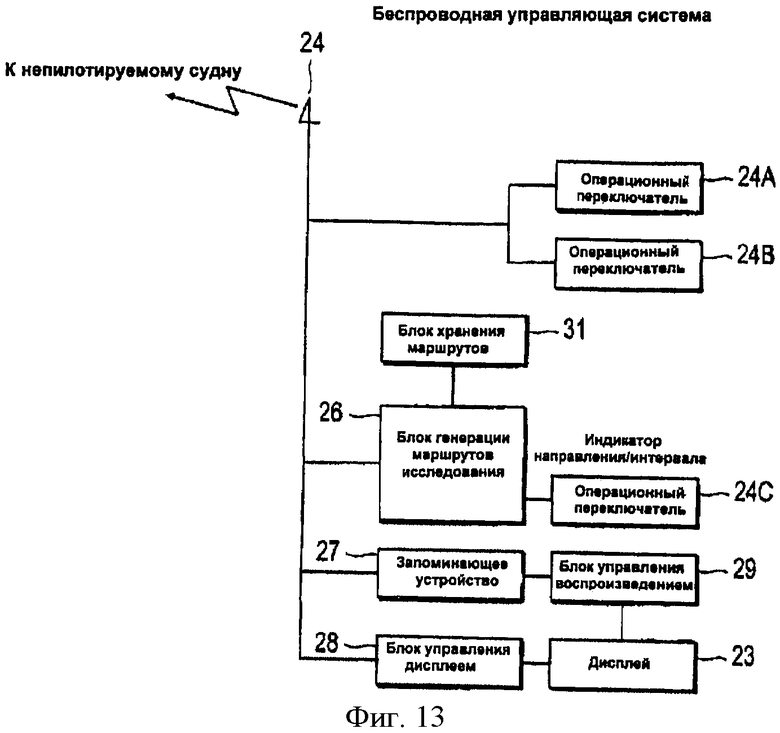
[0026] на фиг.13 показана блок-схема беспроводной управляющей системы для третьего варианта выполнения настоящего изобретения.
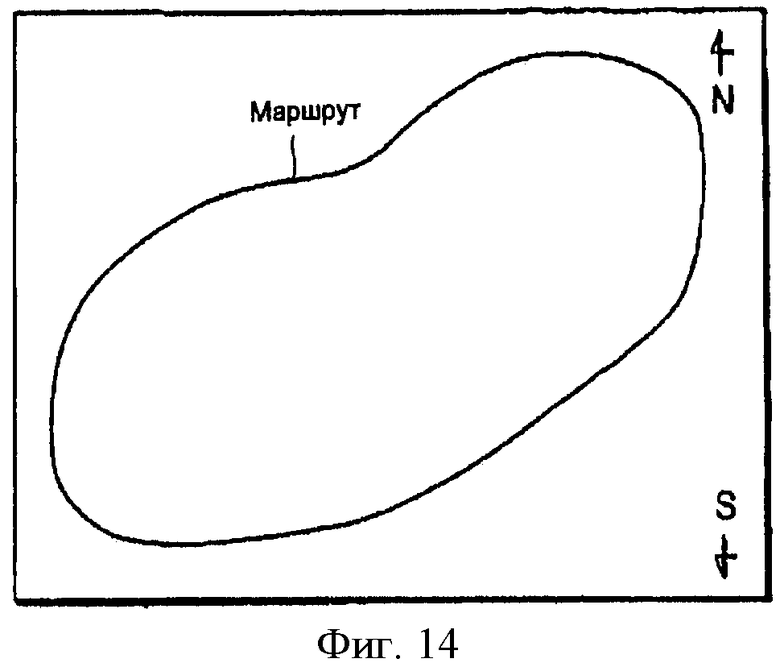
[0027] На фиг.14 показан пример петлеобразного маршрута исследования для третьего варианта выполнения настоящего изобретения.
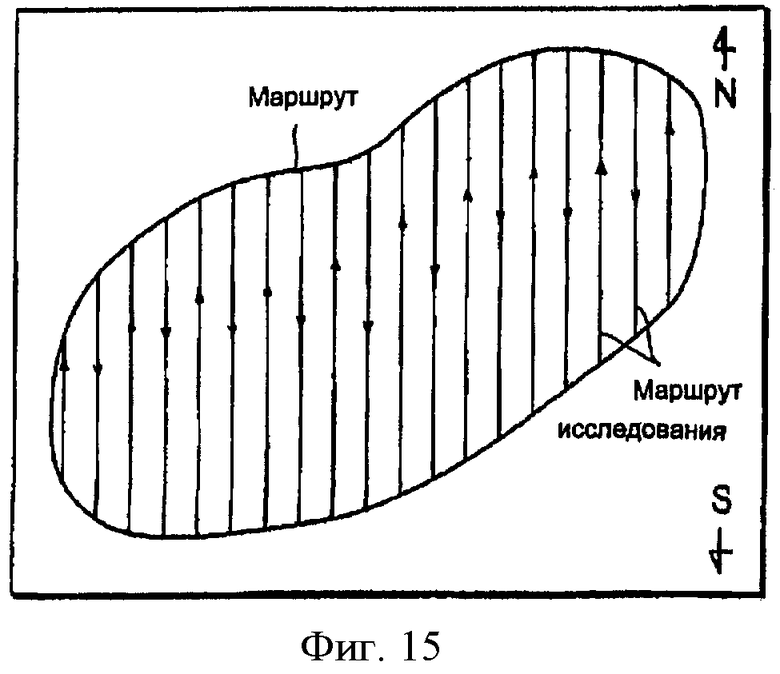
[0028] На фиг.15 показан пример маршрута исследования для третьего варианта выполнения настоящего изобретения.
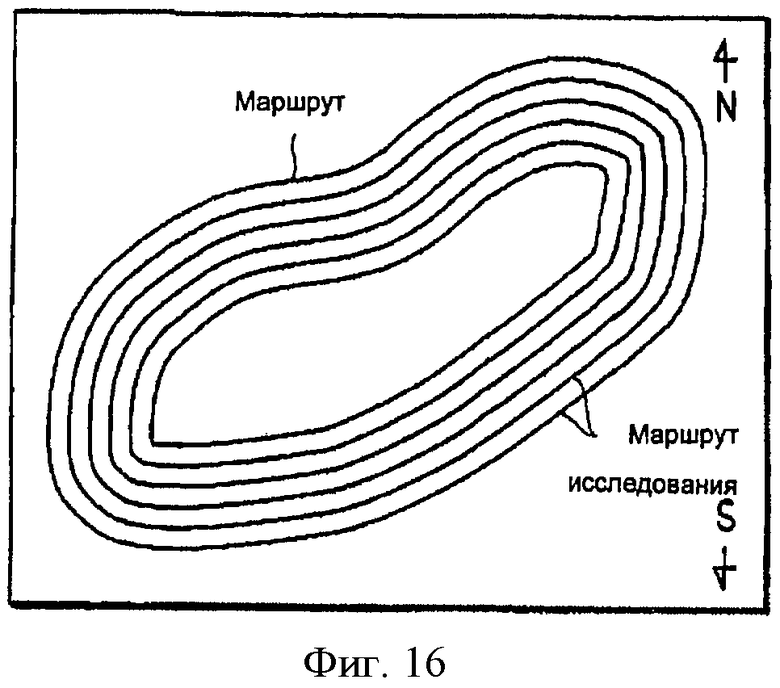
[0029] На фиг.16 показан пример маршрута исследования для третьего варианта выполнения настоящего изобретения.
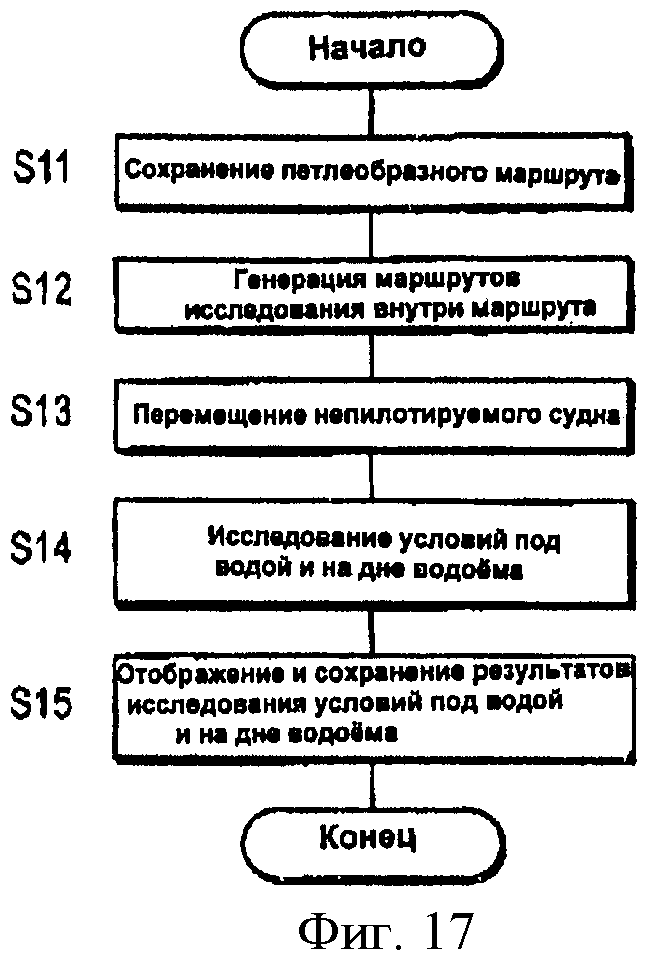
[0030] На фиг.17 показана последовательность операций при работе управляющей системы, изображенной на фиг.5 и фиг.13.
Подробное описание изобретения
[0031] Ниже со ссылками на прилагаемые чертежи описаны четыре варианта выполнения настоящего изобретения в соответствии с предложенными автоматической исследовательской системой для непилотируемого судна и способом автоматического исследования для непилотируемого судна. Изобретение позволяет проводить автоматические исследования под водой и на дне водоема в заданных интервалах. Поскольку имеется четыре различных способа проведения исследования, они будут описаны по отдельности как варианты выполнения настоящего изобретения с первого по четвертый.
Первый вариант выполнения изобретения
[0032] Автоматическая исследовательская система для непилотируемого судна и способ автоматического исследования для непилотируемого судна, которые будут описаны как первый вариант выполнения настоящего изобретения, обеспечивают автоматическое исследование условий под водой и на дне водоема путем генерации множества маршрутов исследования с фиксированным интервалом с использованием в качестве репера вводимой реперной линии исследования и обеспечения автономного перемещения непилотируемого судна для проведения автоматического исследования на указанном множестве маршрутов исследования. Так как интервал между соседними маршрутами исследования может быть задан произвольно, то по желанию легко обеспечить более детальное исследование, например дна водоема, устанавливая меньший интервал между маршрутами и заставляя непилотируемое судно совершать возвратно-поступательные перемещения с узким интервалом.
[0033] Прежде всего, опишем конструкцию автоматической исследовательской системы для непилотируемого судна в рамках первого варианта выполнения настоящего изобретения.
[0034] На фиг.1 показана принципиальная схема автоматической исследовательской системы для непилотируемого судна согласно настоящему изобретению.
[0035] Как видно на чертеже, автоматическая исследовательская система 100 для непилотируемого судна содержит непилотируемое судно 10 для автоматических исследований ("непилотируемое судно 10"), управляющую систему 20 для беспроводного дистанционного управления ("беспроводная управляющая система 20") и управляющий компьютер 30 для беспроводного дистанционного управления ("компьютер 30"). В одном из вариантов выполнения настоящего изобретения беспроводная управляющая система 20 и компьютер 30 могут состоять из простого беспроводного устройства (единственная функция которого заключается в выдаче команд в непилотируемое судно 10) и компьютера (который управляет непилотируемым судном 10 посредством беспроводного устройства). В этом случае беспроводная управляющая система 20, имеющая функцию управления, установлена в компьютере. Компьютер производит вычисления, относящиеся к управлению непилотируемым судном 10, после получения команд из беспроводного устройства, а затем выдает команды, зависящие от результатов вычислений. На основе таких команд он управляет непилотируемым судном 10.
Ниже настоящее изобретение иллюстрируется на примере автоматической исследовательской системы 100 для непилотируемого судна, которая содержит независимые беспроводную управляющую систему 20 и компьютер 30.
[0036] Непилотируемое судно 10 сконструировано так, что оно осуществляет взаимную связь с беспроводной управляющей системой 20 с использованием радиоволн на специальной частоте. Основными функциями непилотируемого судна 10 являются свободное перемещение (вперед, назад и повороты) по воде согласно командам оператора на основе команд беспроводной управляющей системы 20 и исследование условий под водой и на дне водоема путем следования по автоматически сгенерированному маршруту исследования на основе команды исследования из беспроводной управляющей системы 20. Автоматическая исследовательская система для непилотируемого судна, относящаяся к четырем вариантам выполнения настоящего изобретения, описана ниже с акцентом на функцию проведения исследования на основе команд исследования из беспроводной управляющей системы 20.
[0037] Беспроводное судно 10 оборудовано системой GPS для измерения текущего положения в процессе плавания, а также приводным устройством и рулевым устройством. Кроме того, в нем имеется исследовательское устройство для исследования условий под водой и на дне водоема (например, температуры, прозрачности, степени солености воды, положения и глубины дна).
[0038] Беспроводная управляющая система 20 способна осуществлять связь с компьютером 30 через специальный соединительный кабель 35, в результате чего она может осуществлять взаимную связь с компьютером 30. Как вариант, конструкция может быть такой, что беспроводная управляющая система 20 и компьютер 30 осуществляют беспроводную связь. В качестве основных функций они могут передавать данные исследования, хранящиеся в беспроводной управляющей системе 20, в компьютер 30 и передавать данные исследования, хранящиеся в компьютере 30, в беспроводную управляющую систему 20.
[0039] Беспроводная управляющая система 20 оборудована жидкокристаллическим или органическим электролюминесцентным дисплеем, так чтобы непилотируемое судно 10 могло преобразовывать данные исследования, принятые из исследовательского устройства, в изображения и отображать эти изображения условий под водой и на дне водоема в режиме реального времени. Кроме того, можно получить результат исследования, хранящийся в компьютере 30, и отображать результат исследования.
[0040] Беспроводная управляющая система 20 позволяет вводить команду для реперной линии исследования, необходимой для исследования под водой и на дне водоема, и позволяет генерировать маршруты исследования на основе введенной реперной линии исследования.
[0041] Компьютер 30 позволяет принимать и хранить данные исследования, переданные беспроводной управляющей системой 20, анализировать данные исследования и сохранять результат исследования, а также передавать результат исследования в беспроводную управляющую систему 20.
[0042] Хотя выше описан случай беспроводной управляющей системы 20, которая не может сохранять данные исследования, в этом варианте выполнения настоящего изобретения система может быть сконструирована так, чтобы беспроводная управляющая система 20 могла выполнять ту же функцию, что и компьютер 30.
[0043] Компьютер 30 представляет собой обычный персональный компьютер общего назначения и используется, прежде всего, для анализа данных исследования, содержащих информацию об условиях под водой и на дне водоема (например, температуры, прозрачности, степени солености воды, положении и глубины дна). Беспроводная управляющая система 20 и компьютер 30 могут быть просто беспроводным устройством и компьютером.
В одном из вариантов выполнения настоящего изобретения иллюстрируется случай, при котором беспроводная управляющая система 20 действует только как беспроводное устройство и не способна сохранять данные исследования.
[0044] На фиг.2 показано продольное сечение непилотируемого судна 10, а на фиг.3 показан вид сверху непилотируемого судна 10.
[0045] Непилотируемое судно 10 оборудовано приводным устройством 11, источником 12 питания, рулевым устройством 13, приемной/передающей антенной 14, управляющим устройством 15, антенной 16 GPS, устройством 17 вычисления текущего положения, исследовательским устройством 18 и ручкой 19.
[0046] Антенна 16 GPS и устройство 17 вычисления текущего положения образуют систему GPS, которая измеряет текущее положение непилотируемого судна 10. Приводное устройство 11, источник 12 питания, рулевое устройство 13, приемная/передающая антенна 14 и управляющее устройство 15 составляют блок управления перемещением, который управляет перемещением непилотируемого судна 10.
[0047] Приводное устройство 11 содержит винт 111, двигатель 113, который заставляет винт 111 вращаться, и колпак 115 винта.
[0048] Блок лопастей прикреплен к одному концу вращающегося вала винта 111, а к другому концу вращающегося вала прикреплена шестерня 117. Шестерня 118 прикреплена к вращающемуся валу двигателя 113, при этом шестерня 117 и шестерня 118 находятся в зацеплении при заданным передаточном числе. Посредством шестерни 117 и шестерни 118 вращательное усилие двигателя 113 передается винту 111. Вращение винта 111 обеспечивает непилотируемому судну 10 тягу вперед или назад.
[0049] Двигатель 113 связан с источником 12 питания, который состоит из дополнительной батареи, например ионно-литиевой батареи и т.п., и выдает электроэнергию на основе команд привода и команд исследования, передаваемых из беспроводной управляющей системы 20. В нормальных условиях электрический ток из источника 12 питания подается в двигатель 113 в одном направлении для перемещения непилотируемого судна 10 вперед. Если требуется переместить непилотируемое судно 10 назад, электрический ток подают в двигатель 113 в обратном направлении.
[0050] Винт 111 закрыт колпаком 115 винта, охватывающим блок лопастей для его защиты. Колпак 115 винта защищает винт 111 от попадания морских водорослей и мусора, плавающих на воде и способных намотаться на винт.
[0051] Источник 12 питания подает электроэнергию не только в двигатель 113, но и в рулевое устройство 13, передающую/приемную антенну 14, управляющее устройство 15, антенну 16 GPS, устройство 17 вычисления текущего положения и исследовательское устройство 18, установленные на непилотируемом судне 10. Подачей электроэнергии из источника 12 питания в каждое из этих устройств управляет управляющее устройство 15. Оставшееся количество электроэнергии в источнике 12 контролируется управляющим устройством 15.
[0052] Рулевое устройство 13 расположено позади приводного устройства 11. Рулевое устройство 13 содержит перо 131 руля и двигатель 133. Один конец пера 131 руля соединен с вращающимся валом двигателя 133, так чтобы направление пера 131 руля изменялось в соответствии с поворотом двигателя 133. Перо 131 руля поворачивается влево и вправо. Перо 131 руля меняет направление потока воды, идущего от винта 111, а следовательно, и направление перемещения непилотируемого судна 10. Перо 131 руля может поворачиваться влево или вправо приблизительно на 60 градусов относительно вращающегося вала винта 111.
[0053] Двигатель 133 связан с источником 12 питания, и электроэнергия подается, когда необходимо изменить направление перемещения непилотируемого судна 10. Подачей электроэнергии управляет управляющее устройство 15 согласно командам перемещения или командам исследования, поступающим из беспроводной управляющей системы 20.
[0054] Передающая/приемная антенна 14 установлена вертикально на верхней части непилотируемого судна 10. Высоту передающей/приемной антенны 14 выбирают так, чтобы антенна обеспечивала прием радиоволн из беспроводной управляющей системы 20 независимо от некоторого волнения водной поверхности, но не влияла на баланс непилотируемого судна 10. Передающая/приемная антенна 14 связана с управляющим устройством 15 и передает принятые команды перемещения и измерения в управляющее устройство 15. Передающая/приемная антенна 14 передает различные сигналы, включая данные исследования, принятые из управляющего устройства 15, в беспроводную управляющую систему 20.
[0055] Управляющее устройство 15 управляет работой различных устройств, установленных на непилотируемом судне 10. В частности, когда приняты команды измерения, оно управляет работой приводного устройства 11 и рулевого устройства 13, так чтобы непилотируемое судно 10 могло точно следовать маршрутом исследования, принятым из беспроводной управляющей системы 20. Кроме того, с управляющим устройством 15 связана антенна 16 GPS, устройство 17 вычисления текущего положения и исследовательское устройство 18.
[0056] Антенна 16 GPS - это антенна для приема радиосигналов, передаваемых искусственными спутниками. Радиосигналы, которые антенна 16 GPS принимает от искусственных спутников, передаются в устройство 17 вычисления текущего положения. Устройство 17 вычисления текущего положения на основе радиосигналов искусственных спутников вычисляет текущее положение непилотируемого судна 10. Текущее положение непилотируемого судна 10 вычисляется на основе общепринятого способа вычисления, поэтому его описание опущено.
[0057] Исследовательское устройство 18 - это устройство для исследования условий под водой и на дне водоема. Исследовательское устройство 18 оборудовано ультразвуковым генератором, излучающим ультразвуковые волны специфической частоты или ультразвуковые волны различных частот и принимающим ультразвуковые волны, отраженные от дна водоема и т.п. Объекты, находящиеся в воде, например косяки рыб и топографические объекты на дне водоема, можно измерить, измеряя временные интервалы до возвращения ультразвукового сигнала. Примером такого устройства является сонар.
[0058] Однако исследовательское устройство 18 не ограничено сонаром, в котором используются ультразвуковые волны. Исследовательское устройство 18 оборудовано также специальными датчиками, например датчиком температуры, датчиком прозрачности, датчиком степени солености и т.д. С помощью таких датчиков можно измерить температуру, прозрачность и степень солености воды. Можно использовать датчик температуры, датчик прозрачности и датчик степени солености, которые легко доступны на рынке. Данные исследования, полученные исследовательским устройством 18, передаются в беспроводную управляющую систему 20 посредством передающей/приемной антенны 14.
[0059] На фиг.4 показан внешний вид беспроводной управляющей системы 20. Беспроводная управляющая система 20 обеспечивает передачу команд перемещения и команд исследования на непилотируемое судно 10, а также сохранение данных исследования, переданных из непилотируемого судна 10. Беспроводная управляющая система 20 обеспечивает ввод реперной линии исследования и генерацию множества маршрутов исследования на основе введенной реперной линии исследования. Кроме того, она обеспечивает генерацию маршрутов исследования путем изменения дистанций для генерируемых маршрутов и задает порядок перемещения по сгенерированным маршрутам исследования.
[0060] На чертеже показана беспроводная управляющая система 20, оборудованная передающей/приемной антенной 21, дисплеем 23 и операционными переключателями 24 (24А-24С).
[0061] Передающая/приемная антенна 21 используется для передачи команд перемещения и команд исследования на непилотируемое судно 10 и для приема данных исследования из непилотируемого судна 10.
[0062] На передней панели беспроводной управляющей системы 20 имеется выключатель дисплея 23, который используется для отображения топографической карты изучаемого места, а также реперной линии исследования, введенной с использованием операционных переключателей 24, и множества маршрутов исследования, генерируемых относительно реперной линии исследования, совместно с топографической картой изучаемого места.
[0063] Операционный переключатель 24А действует как элемент для ввода реперной линии исследования, предназначенный для ввода начальной и конечной точек реперной линии исследования посредством ввода их широты и долготы или для ввода их координат по осям Х и Y двумерной системы координат, началом которой является специфическая точка. Операционный переключатель 24В используется как индикатор для индикации автономного прохождения сгенерированного маршрута исследования, то есть для выдачи команд исследования, и для индикации порядка прохождения маршрутов для генерируемых маршрутов исследования. Операционный переключатель 24С используется как индикатор изменения дистанции маршрута исследования и служит для изменения дистанций генерируемых маршрутов исследования.
[0064] На фиг.5 показана блок-схема непилотируемого судна 10 и беспроводной управляющей системы 20 согласно первому варианту выполнения настоящего изобретения.
[0065] На непилотируемом судне 10 установлена система GPS, состоящая из антенны 16 GPS и устройства 17 вычисления текущего положения, блока управления перемещением, состоящего из источника 12 питания, приводного устройства 11, рулевого устройства 13 и управляющего устройства 15, а также исследовательского устройства 18. Управляющее устройство 15 и исследовательское устройство 18 связаны с передающей/приемной антенной 14, обеспечивающей связь с беспроводной управляющей системой 20. Функция каждого блока, который входит в состав непилотируемого судна 10, показана в надписях на фиг.2 и 3, поэтому здесь их подробное описание опущено.
[0066] Беспроводная управляющая система 20 содержит операционный переключатель 24А, который функционирует как блок ввода реперной линии исследования, операционный переключатель 24В, который функционирует как индикатор, операционный переключатель 24С, который действует как система преобразования, блок 25 генерации реперной линии исследования, блок 26 генерации маршрутов исследования, запоминающее устройство 27, блок 28 управления дисплеем, блок 29 управления воспроизведением и дисплей 23.
[0067] Операционный переключатель 24А связан с блоком 25 генерации реперной линии исследования и используется для ввода в блок 25 генерации реперной линии исследования начальной и конечной точек линейного сегмента исследования или дуги, называемой реперной линией исследования, посредством ввода их широты и долготы или ввода их координат по осям Х и Y в двумерной системе координат, в которой в качестве начала координат используется специфическая точка.
[0068] Блок 25 генерации реперной линии исследования, изображенный на фиг.6, предназначен для генерации линейного сегмента исследования или дуги с двумя координатами, введенными операционным переключателем 24А и представляющими собой начальную и конечную точки. Решение о том, выполнить ли линию исследования в виде сегмента прямой линии или дуги, а также о величине кривизны этой дуги может определяться блоком 25 генерации реперной линии исследования или эти значения могут быть установлены произвольно с помощью операционного переключателя 24А. Пример реперной линии исследования, показанной на фиг.6, представляет собой прямую линию.
[0069] Блок 26 генерации маршрутов исследования генерирует множество маршрутов исследования на основе начальной и конечной точек реперной линии исследования, сгенерированной блоком 25 генерации реперной линии исследования, путем смещения реперной линии исследования несколько раз на фиксированный интервал. Решения о том, на какой интервал следует перемещать реперную линию исследования и каково должно быть количество сгенерированных маршрутов исследования, может быть заранее установлено в блоке 26 генерации маршрутов исследования или эти значения могут быть установлены произвольно с помощью операционного переключателя 24В. На фиг.7 показано пять маршрутов исследования, сгенерированных путем четырехкратного смещения реперной линии исследования, изображенной на фиг.6.
[0070] Операционный переключатель 24В выдает команду исследования, которая предписывает, как непилотируемое судно 10 должно автономно перемещаться, отслеживая маршруты исследования, сгенерированные, как показано на фиг.7, и в каком порядке должны быть пройдены эти маршруты исследования, сгенерированные, как показано на фиг.7. В примере, показанном на фиг.7, поскольку порядок перемещения определен как 1, 2, 3, 4 и 5, начиная сверху, непилотируемое судно 10 после получения команды исследования проводит исследования под водой и на дне водоема, следуя по маршрутам исследования в указанном порядке. Более конкретно, судно перемещается от начальной точки до конечной точки первого маршрута исследования, затем перемещается от конечной точки первого маршрута исследования в конечную точку второго маршрута исследования, чтобы пройти второй маршрут исследования до начальной точки, затем перемещается от начальной точки второго маршрута исследования до начальной точки третьего маршрута исследования, чтобы пройти третий маршрут до его конечной точки, и т.д., пока не достигнет конечной точки пятого маршрута исследования. Другими словами, сгенерированные маршруты исследования проходятся за один непрерывный рейс, без отклонения от курсов в какой-либо точке от начала и до конца.
[0071] Операционный переключатель 24С предназначен для изменения дистанций маршрутов, генерируемых блоком 26 генерации маршрутов исследования, путем наложения их на карту исследуемого места. Это делается таким способом, что выбранные маршруты исследования с помощью операционного переключателя 24С можно удлинить или сократить. Например, если, при использовании первоначально заданной дистанции генерируемого маршрута исследования, конкретный маршрут получается слишком длинным и выходит за пределы области исследования или слишком коротким и не охватывает всей области исследования, поскольку форма места исследования является сложной, с целью проведения оптимального исследования дистанцию маршрута исследования для каждого маршрута исследования можно изменить.
[0072] Запоминающее устройство 27 хранит данные исследования об условиях под водой и на дне водоема, принятые из непилотируемого судна 10.
[0073] Дисплейный блок 28 обрабатывает данные об условиях под водой и на дне водоема, принятые из непилотируемого судна 10, для отображения этих условий на дисплее 23.
[0074] Блок 29 управления воспроизведением воспроизводит изображение условий под водой и на дне водоема на дисплее 23 на основе данных исследования условий под водой и на дне водоема, хранящихся в запоминающем устройстве 27.
[0075] Ниже описана работа автоматической исследовательской системы для непилотируемого судна, имеющей вышеописанную конструкцию, со ссылками на последовательность операций, приведенную на фиг.8. Эта последовательность операций относится к работе управляющей системы, показанной на фиг.5, и иллюстрирует стадии способа автоматического исследования для непилотируемого судна согласно первому варианту выполнения настоящего изобретения.
Стадия S1.
[0076] В начале на дисплее 23 отображается карта исследуемого места. Оператор вводит в блок 25 генерации реперной линии исследования широту и долготу начальной точки и конечной точки реперной линии исследования, управляя операционным переключателем 24А беспроводной управляющей системы 20, с целью генерации этим блоком реперной линии исследования.
[0077] В альтернативном варианте начальная точка и конечная точка могут быть заданы путем ввода их координат по осям Х и Y двумерной системы координат. Когда широта и долгота начальной и конечной точек реперной линии исследования введены, блок 25 генерации реперной линии исследования генерирует линию исследования, соединяющую начальную и конечную точки, как показано на фиг.6. Затем эта линия исследования отображается на карте в виде реперной линии исследования.
Стадия S2.
[0078] Блок 26 генерации маршрутов исследования генерирует множество маршрутов исследования путем переноса реперной линии исследования, созданной блоком 25 генерации линии исследования, на фиксированный интервал. Сгенерированный маршрут исследования отображается наложенным на карту. Поэтому легко видеть место, где проводится исследование.
Стадия S3
[0079] Система выполнена так, что можно задать порядок, согласно которому непилотируемого судно 10 должно следовать по множеству сгенерированных маршрутов исследования. Этот порядок перемещения может быть задан путем манипуляции операционным переключателем 24В. Кроме того, система выполнена так, что можно регулировать дистанцию каждого маршрута исследования. Дистанцию маршрута исследования можно изменить, управляя операционным переключателем 24С. Изменение маршрута исследования можно производить, глядя на карту на дисплее, на которую наложен этот маршрут. Итак, дистанцию маршрута исследования и порядок перемещения определяют вручную, манипулируя операционным переключателем 24С и операционным переключателем 24В соответственно.
[0080] Хотя в примере для первого варианта выполнения настоящего изобретения показано, что задание дистанции маршрута исследования и задание порядка перемещения производят вручную, можно также запрограммировать стандартные способы определения в блоке генерации маршрута исследования и позволить системе задавать дистанцию маршрута исследования и порядок перемещения автоматически на основе анализа исследуемых мест, отображенных на карте.
Стадия S4
[0081] Когда в результате манипуляции операционным переключателем 24В беспроводной управляющей системы 20 выдается команда исследования, эта команда исследования передается на непилотируемое судно 10, и одновременно из беспроводной управляющей системы 20 передаются маршруты исследования в заданном порядке.
[0082] Переданный маршрут исследования принимается управляющим устройством 15, и это управляющее устройство 15 управляет приводным устройством 11 и рулевым устройством 13, проверяя текущее положение с помощью системы GPS и сравнивая текущее положение и маршрут исследования с целью точного следования маршруту исследования. Управляющее устройство 15 компенсирует, в зависимости от скорости перемещения непилотируемого судна 10 и направления перемещения непилотируемого судна 10, расчетное рассогласование между положением, которое судно занимало несколько секунд назад, и маршрутом исследования на основе текущего положения.
Стадия S5
[0083] Как только из системы 20 управления исследованием принята команда исследования, исследовательское устройство 18 непилотируемого судна 10 начинает исследование и передает данные исследования в запоминающее устройство 27 и блок 28 управления дисплеем беспроводной управляющей системы 20.
Стадия S6
[0084] Запоминающее устройство 27 сохраняет данные исследования в режиме реального времени. Блок 28 управления дисплеем обрабатывает эти данные исследования и отображает их на дисплее 23. Изображение на нем аналогично изображению, показанному на фиг.9. Согласно этому изображению заштрихованная область G показывает, как выглядит дно водоема, в то время как область F, появившаяся между поверхностью воды и дном водоема, соответствует косяку рыб.
[0085] Как понятно из вышеизложенного, автоматическая исследовательская система для непилотируемого судна и способ автоматического исследования для непилотируемого судна, реализованные согласно первому варианту выполнения настоящего изобретения, позволяют непилотируемому судну 10 перемещаться по сгенерированному множеству маршрутов исследования в указанном порядке перемещения автоматически, так чтобы можно было легко получить данные исследования для изучаемой области, что обеспечивает точный результат исследования.
[0086] Данные исследования, хранящиеся в запоминающем устройстве 27 беспроводной управляющей системы 20, передаются в компьютер 30 для анализа, в результате которого формируется карта дна водоема из контурных линий, как показано на фиг.10. Область R, которую невозможно показать контурными линиями и которая показана в виде заштрихованной области, представляет область резкого изменения глубины. Конечно, исследовательское устройство 18 оборудовано специальными датчиками, поэтому оно также хранит такие данные исследования для специфической области, как, например, значения температуры, прозрачности и степени солености воды. Изображение, отражающее результат исследования, как показано на фиг.10, может дублироваться на дисплее 23 беспроводной управляющей системы 20 путем связывания беспроводной управляющей системы 20 с компьютером 30.
[0087] Хотя в примере для первого варианта выполнения настоящего изобретения показано, что как блок 26 генерации маршрута исследования, так и запоминающее устройство 27 расположены в беспроводной управляющей системе 20 конструкция может быть такой, что либо блок 26 генерации маршрута исследования, либо запоминающее устройство 27 находится в беспроводной управляющей системе 20, а другой элемент установлен на непилотируемом судне 10. Кроме того, конструкция может быть такой, что как блок 26 генерации маршрута исследования, так и запоминающее устройство 27 расположены на непилотируемом судне 10. Беспроводная управляющая система 20 и компьютер 30 могут быть просто беспроводным устройством и компьютером.
Второй вариант выполнения изобретения
[0088] Автоматическая исследовательская система для непилотируемого судна и способ автоматического исследования для непилотируемого судна, которые описаны в рамках второго варианта выполнения настоящего изобретения, обеспечивают автоматическое исследование условий под водой и на дне водоема путем генерации множества маршрутов исследования в виде прямолинейных сегментов, идущих с фиксированным интервалом в направлении, перпендикулярном линии исследования, которая представляет собой введенную реперную линию исследования, используемую в качестве репера, и обеспечивают автономное перемещение непилотируемого судна 10 по указанному множеству маршрутов исследования для автоматического исследования. Так как интервал между соседними маршрутами исследования может быть определен произвольно, по желанию легко обеспечивается более детальное исследование, например, дна водоема, путем установки более узкого интервала между маршрутами, и можно заставить непилотируемое судно 10 совершать перемещения с узким интервалом.
[0089] Разница между первым и вторым вариантами выполнения настоящего изобретения заключается только в способе генерации маршрутов исследования, которые генерируются в блоке 26 генерации маршрутов исследования, расположенном в беспроводной управляющей системе 20. Поэтому здесь опущено описание конструкции и работы всех компонентов, кроме блока 26 генерации маршрутов исследования, поскольку оно совпадает с описанием автоматической исследовательской системы для непилотируемого судна, данным для первого варианта выполнения настоящего изобретения.
[0090] На фиг.11 показан пример реперной линии исследования, сгенерированной блоком 25 генерации реперной линии исследования, а на фиг.12 показан пример маршрутов исследования, сгенерированных блоком 26 генерации маршрутов исследования.
[0091] Блок 25 генерации реперной линии исследования, расположенный в беспроводной управляющей системе 20 (см. фиг.5), генерирует, как показано на фиг.11, линейный или дугообразный сегмент линии исследования по двум координатам, вводимым посредством операционного переключателя 24А в качестве начальной и конечной точек. Решение о том, выполнить ли линию исследования в виде сегмента прямой линии или дуги, а также о величине кривизны этой дуги может определяться блоком 25 генерации реперной линии исследования, или эти значения могут быть установлены произвольными с помощью операционного переключателя 24А. Пример реперной линии исследования, показанной на фиг.11, представляет собой прямую линию.
[0092] Блок 26 генерации маршрутов исследования генерирует множество маршрутов исследования, генерируя множество прямых линий, идущих параллельно друг другу и с равным интервалом друг от друга, причем перпендикулярно линии исследования, которая формирует реперную линию исследования, генерируемую блоком 25 генерации реперной линии исследования. Значения интервала, с которым происходит генерация маршрутов исследования, и количество маршрутов исследования могут быть заранее заданы в блоке 26 генерации маршрутов исследования или, альтернативно, могут быть установлены путем манипуляции операционным переключателем 24В. На фиг.12 показано пять маршрутов исследования, сгенерированных с установленным интервалом и идущих перпендикулярно реперной линии исследования, показанной на фиг.11, пересекая ее.
[0093] Так же, как и в первом варианте выполнения настоящего изобретения, операционный переключатель 24В выдает команду исследования, которая предписывает, как непилотируемое судно 10 должно производить автономное перемещение, отслеживая маршруты исследования, сгенерированные, как показано на фиг.12, и в каком порядке должны быть пройдены эти маршруты исследования, сгенерированные, как показано на фиг.12. В примере, показанном на фиг.12, поскольку порядок перемещения определен как 1, 2, 3, 4 и 5 снизу, непилотируемое судно 10 после получения команды исследования проводит исследования под водой и на дне водоема, следуя по маршрутам исследования в указанном порядке.
[0094] Более конкретно, судно перемещается от одного конца до второго конца первого маршрута исследования, затем перемещается в первый конец второго маршрута исследования, ближайшему к концевой точке первого маршрута исследования, и перемещается по второму маршруту исследования к его второму концу, а затем перемещается от второго конца второго маршрута исследования в первый конец третьего маршрута исследования и перемещается по третьему маршруту исследования к его второму концу, и т.д., пока не достигнет конца пятого маршрута исследования. Другими словами, сгенерированные маршруты исследования проходятся за один непрерывный рейс, без отклонения от курсов в какой-либо точке от начала и до конца.
[0095] Так же, как в первом варианте выполнения настоящего изобретения, можно менять дистанции соседних маршрутов исследования, генерируемых блоком 26 генерации маршрутов исследования, накладывая их на карту изучаемого места. Изменение дистанций для соседних маршрутов исследования можно выполнить с помощью операционного переключателя 24С. Операционным переключателем 24С можно удлинять или сокращать выбранные маршруты исследования. Например, если, при использовании первоначально заданной дистанции генерируемого маршрута исследования конкретный маршрут получается слишком длинным и выходит за пределы области исследования или слишком коротким и не охватывает всей области исследования, поскольку форма места исследования является сложной, с целью проведения оптимального исследования дистанцию маршрута исследования для каждого маршрута исследования можно изменить.
[0096] Хотя в примере второго варианта выполнения настоящего изобретения показано, что как блок 26 генерации маршрута исследования, так и запоминающее устройство 27 расположены в беспроводной управляющей системе 20, конструкция может быть такой, что либо блок 26 генерации маршрута исследования, либо запоминающее устройство 27 находится в беспроводной управляющей системе 20, а другой элемент установлен на непилотируемом судне 10. Беспроводная управляющая система 20 и компьютер 30 могут быть обычными беспроводным устройством и компьютером. Кроме того, конструкция может быть такой, что как блок 26 генерации маршрута исследования, так и запоминающее устройство 27 расположены на непилотируемом судне 10.
[0097] Как было отмечено выше, разница между первым и вторыми вариантами выполнения настоящего изобретения заключается только в способе генерации маршрутов исследования, которые генерируются в блоке 26 генерации маршрутов исследования, расположенном в беспроводной управляющей системе 20. Однако для пояснения работы автоматической исследовательской системой для непилотируемого судна в рамках второго варианта выполнения настоящего изобретения, ниже описана работа такой системы со ссылкой на фиг.8, которая использовалась при описании первого варианта выполнения настоящего изобретения. Последовательность операций относится к работе управляющей системы, показанной на фиг.5, и иллюстрирует стадии способа автоматического исследования для непилотируемого судна согласно второму варианту выполнения настоящего изобретения.
Стадия S1
[0098] В начале на дисплее 23 отображается карта исследуемого места. Оператор вводит в блок 25 генерации реперной линии исследования широту и долготу начальной точки и конечной точки реперной линии исследования, управляя операционным переключателем 24А беспроводной управляющей системы 20, с целью генерации этим блоком реперной линии исследования.
[0099] В альтернативном варианте начальная точка и конечная точка могут быть заданы путем ввода их координат по осям Х и Y двумерной системы координат. Когда широта и долгота начальной и конечной точек реперной линии исследования введены, блок 25 генерации реперной линии исследования генерирует линию исследования, соединяющую начальную и конечную точки, как показано на фиг.11. Затем эта линия исследования отображается на карте в виде реперной линии исследования.
Стадия S2
[0100] Блок 26 генерации маршрутов исследования генерирует множество маршрутов исследования путем генерации множества прямых линий, идущих параллельно друг другу с фиксированным интервалом друг от друга и перпендикулярно линии исследования, которая формирует реперную линию исследования, генерируемую блоком 25 генерации линии исследования. Сгенерированный маршрут исследования отображается наложенным на карту. Поэтому легко видеть место, где проводится исследование.
Стадия S3
[0101] Система выполнена так, что можно задать порядок, согласно которому непилотируемое судно 10 должно следовать множеству сгенерированных маршрутов исследования. Этот порядок перемещения может быть задан путем манипуляции операционным переключателем 24В. Кроме того, система выполнена так, что можно регулировать дистанцию каждого маршрута исследования. Дистанцию маршрута исследования можно изменить, управляя операционным переключателем 24С. Изменение маршрута исследования можно производить, гладя на карту на дисплее, на которую наложен этот маршрут. Итак, дистанцию маршрута исследования и порядок перемещения определяют вручную, манипулируя операционным переключателем 24С и операционным переключателем 24В соответственно.
[0102] Хотя в примере второго варианта выполнения настоящего изобретения показано, что задание дистанции маршрута исследования и задание порядка перемещения производят вручную, можно также запрограммировать стандартные способы определения в блоке генерации маршрута исследования и позволить системе задавать дистанцию маршрута исследования и порядок перемещения автоматически на основе анализа исследуемых мест, отображенных на карте.
Стадия S4
[0103] Когда в результате манипуляции операционным переключателем 24В беспроводной управляющей системы 20 выдается команда исследования, эта команда исследования передается на непилотируемое судно 10, и одновременно из беспроводной управляющей системы 20 передаются маршруты исследования в заданном порядке. Переданный маршрут исследования принимается управляющим устройством 15, и это управляющее устройство 15 управляет приводным устройством 11 и рулевым устройством 13, проверяя текущее положение с помощью системы GPS и сравнивая текущее положение и маршрут исследования с целью точного следования маршруту исследования. Управляющее устройство 15 компенсирует, в зависимости от скорости перемещения непилотируемого судна 10 и направления перемещения непилотируемого судна 10, расчетное рассогласование между положением, которое судно занимало несколько секунд назад, и маршрутом исследования на основе текущего положения.
Стадия S5
[0104] Как только из системы 20 управления исследованием принята команда исследования, исследовательское устройство 18 непилотируемого судна 10 начинает исследование и передает данные исследования в запоминающее устройство 27 и блок 28 управления дисплеем беспроводной управляющей системы 20.
Стадия S6
[0105] Запоминающее устройство 27 сохраняет данные исследования в режиме реального времени. Блок 28 управления дисплеем обрабатывает эти данные исследования и отображает их на дисплее 23. Изображение на нем аналогично изображению, показанному на фиг.9. Согласно этому изображению заштрихованная область G показывает, как выглядит дно водоема, в то время как область F, появившаяся между поверхностью воды и дном водоема, соответствует косяку рыб.
[0106] Как понятно из вышеизложенного, автоматическая исследовательская система для непилотируемого судна и способ автоматического исследования для непилотируемого судна, реализованные согласно второму варианту выполнения настоящего изобретения, позволяют непилотируемому судну 10 перемещаться по сгенерированному множеству маршрутов исследования в указанном порядке перемещения автоматически, так чтобы можно было легко получить данные исследования для изучаемой области, что обеспечивает точный результат исследования.
[0107] Данные исследования, хранящиеся в запоминающем устройстве 27 беспроводной управляющей системы 20, передаются в компьютер 30 для анализа, в результате которого формируется карта дна водоема из контурных линий, как показано на фиг.10. Область R, которую невозможно показать контурными линиями и которая показана в виде заштрихованной области, представляет область резкого изменения глубины. Конечно, исследовательское устройство 18 оборудовано специальными датчиками, поэтому оно также хранит такие данные исследования для специфической области, как, например, значения температуры, прозрачности и степени солености воды. Изображение, отражающее результат исследования, как показано на фиг.10, может дублироваться на дисплее 23 беспроводной управляющей системы 20 путем связывания беспроводной управляющей системы 20 с компьютером 30.
Третий вариант выполнения изобретения
[0108] Автоматическая исследовательская система для непилотируемого судна и способ автоматического исследования для непилотируемого судна, которые описаны в рамках третьего варианта выполнения настоящего изобретения, обеспечивают сначала перемещение непилотируемого судна 10 по петлеобразному маршруту, окружающему исследуемое место, сохранение петлеобразного маршрута на основе данных местоположения из системы GPS, полученных в процессе перемещения, генерацию внутри петлеобразного маршрута множества маршрутов исследования, задаваемых направлениями и интервалами, и автоматическое перемещение непилотируемого судна 10 по указанному множеству маршрутов исследования для проведения автоматического исследования условий под водой и на дне водоема. Так как интервал между соседними маршрутами исследования может быть определен произвольно, по желанию легко обеспечивается более детальное исследование, например, дна водоема, путем установки более узкого интервала между маршрутами, и можно заставить непилотируемое судно 10 совершать перемещения с узким интервалом.
[0109] Разница между третьим и вторым вариантами выполнения настоящего изобретения заключается в том, что построение области исследования осуществляют, заставляя непилотируемое судно 10 фактически перемещаться, а маршруты исследования могут создаваться автоматически в пределах указанной области исследования, поэтому конструкция беспроводной управляющей системы 20 немного отличается от конструкции для первого или второго вариантов выполнения настоящего изобретения, также отличается последовательность стадий в способе автоматического исследования для непилотируемого судна; поэтому ниже со ссылками на чертежи описана конструкция беспроводной управляющей системы 20 и последовательность стадий в способе автоматического исследования для непилотируемого судна. Описание компонентов, идентичных тем компонентам автоматической исследовательской системы, которые рассмотрены в первом варианте выполнения настоящего изобретения, и описание их работы опущено.
[0110] На фиг.13 показана блок-схема беспроводной управляющей системы 20 для третьего варианта выполнения настоящего изобретения.
[0111] Внешний вид беспроводной управляющей системы 20, используемой в рамках третьего варианта выполнения настоящего изобретения, совпадает с показанным на фиг.4. Беспроводная управляющая система 20, используемая в рамках третьего варианта выполнения настоящего изобретения, содержит оперативные переключатели 24А и 24В, предназначенные для ввода команд перемещения и исследования для непилотируемого судна 10, чтобы заставить его свободно перемещаться в соответствии с намерениями оператора, и запоминающее устройство 31 для хранения маршрута, предназначенное для хранения маршрута непилотируемого судна 10 на основе текущих данных о местоположении, принятых из системы GPS непилотируемого судна 10.
[0112] Например, манипуляция операционным переключателем 24А приводит в действие приводное устройство 11 непилотируемого судна 10 и заставляет непилотируемое судно 10 перемещаться вперед. Кроме того, манипуляция операционным переключателем 24В приводит в действие рулевое устройство 13 непилотируемого судна 10 и заставляет двигающееся непилотируемое судно 10 изменить направление. Для задания области исследования оператор манипулирует операционными переключателями 24А и 24В, заставляя непилотируемое судно 10 описать петлеобразную траекторию. Кроме того, конструкция предусматривает, что операционный переключатель 24А выдает команду исследования, которая предписывает непилотируемому судну 10 проводить автоматическое исследование.
[0113] Устройство 31 хранения маршрута сохраняет маршрут, введенный оператором и заставляющий непилотируемое судно 10 перемещаться на основе данных местоположения, переданных из GPS непилотируемого судна 10.
[0114] Блок 26 генерации маршрутов исследования предназначен для автоматической генерации маршрутов исследования внутри петлеобразного маршрута, сохраненного в устройстве 31 хранения маршрута. Решение о том, в каком направлении и с каким интервалом следует генерировать маршруты исследования, может определяться операционным переключателем 24С, который заставляет работать систему выдачи команд для изменения направления и интервала.
[0115] Беспроводная управляющая система 20 содержит запоминающее устройство 27, блок 28 управления дисплеем, блок 29 управления воспроизведением и дисплей 23, но работа и назначение этих блоков идентичны описанным для первого варианта выполнения настоящего изобретения, и поэтому описания этих блоков опущены.
[0116] На фиг.14 показан пример петлеобразного маршрута, хранящегося в устройстве 31 хранения маршрута, а на фиг.15 - пример маршрутов исследования, сгенерированных блоком 26 генерации маршрутов исследования.
[0117] Как показано на фиг.13, петлеобразный маршрут, хранящийся в устройстве 31 хранения маршрута, отображается на дисплее 23. Блок 26 генерации маршрутов исследования генерирует маршрут исследования внутри этого маршрута с направлением и интервалом, определяемыми с использованием операционного переключателя 24. Например, если направление идет с севера на юг, а интервал составляет 10 м, то внутри маршрута автоматически генерируются маршруты исследования, идущие в направлении "север-юг" с интервалами 10 м, как показано на фиг.15.
[0118] Когда операционным переключателем 24А манипулируют после того, как маршруты исследования автоматически сгенерированы и команда исследования выдана, непилотируемое судно 10 перемещается от маршрута исследования, показанного справа на фиг.15, к маршруту исследования, показанному слева, осуществляя при этом исследование условий под водой и на дне водоема. Более конкретно, судно перемещается от одного конца маршрута исследования, показанного в самой правой части, к другому концу того же самого маршрута, затем перемещается к ближайшему концу маршрута исследования, показанного слева, следует по этому маршруту исследования ко второму его концу, затем перемещается к первому концу маршрута исследования, показанного слева, и следует по этому маршруту исследования к его второму концу, и т.д., пока оно не достигнет конечной точки маршрута исследования, показанного в крайней левой позиции. Другими словами, сгенерированные маршруты исследования проходятся за один непрерывный рейс, без отклонения от курса в какой-либо точке от начала и до конца.
[0119] Конструкция может обеспечивать автоматическое определение дистанции и порядка следования по сгенерированным маршрутам исследования, как показано на фиг.15. Конструкция может быть такой, чтобы маршруты исследования генерировались путем задания только интервала при сохранении формы маршрута, как показано на фиг.16.
[0120] Хотя в примере третьего варианта выполнения настоящего изобретения показано, что блок 31 хранения маршрута исследования, блок 26 генерации маршрута исследования и запоминающее устройство 27 расположены в беспроводной управляющей системе 20, конструкция может быть такой, что любой из этих элементов: блок 31 хранения маршрута исследования, блок 26 генерации маршрута исследования и запоминающее устройство 27, может, в равной степени, располагаться на непилотируемом судне 10. Беспроводная управляющая система 20 и компьютер 30 могут быть просто беспроводным устройством и компьютером.
[0121] Ниже описана работа автоматической исследовательской системы для непилотируемого судна, имеющей вышеописанную конструкцию, со ссылками на последовательность операций, показанную на фиг.17. Эта последовательность операций относится к работе системы управления непилотируемым судном 10, показанной на фиг.5, и беспроводной управляющей системы 20, показанной на фиг.13, и иллюстрирует стадии способа автоматического исследования для непилотируемого судна согласно третьему варианту выполнения настоящего изобретения.
Стадия S11
[0122] В начале на дисплее 23 отображается карта исследуемого места. Оператор манипулирует операционными переключателями 24А и 24В беспроводной управляющей системы 20 для ввода команд перемещения непилотируемого судна 10, которые заставляют непилотируемое судно 10 перемещаться по петлеобразной траектории, определяя область исследования. Координаты непилотируемого судна 10, перемещаемого под управлением команд перемещения, сохраняются в виде маршрутов (состоят из групп точек, определенных через фиксированные интервалы) в устройстве 31 хранения маршрута.
Стадия S12
[0123] Блок 26 генерации маршрута исследования генерирует маршруты исследования, как показано на фиг.15, внутри петлеобразного маршрута, хранящегося в устройстве 31 хранения маршрута, на основе направлений и интервалов, задаваемых операционным переключателем 24С. Сгенерированный маршрут исследования отображается наложенным на карту. Поэтому легко видеть место, где проводится исследование.
Стадия S13
[0124] Когда с помощью операционного переключателя 24А беспроводной управляющей системы 20 выдана команда исследования, она передается на непилотируемое судно 10, и беспроводная управляющая система 20 одновременно передает маршруты исследования в заданном порядке: от маршрута исследования, расположенного в крайней правой позиции, до маршрута, расположенного в крайней левой позиции.
[0125] Переданный маршрут исследования принимается управляющим устройством 15, а управляющее устройство 15 управляет работой приводного устройства 11 и рулевого устройства 13, проверяет текущее положение с помощью системы GPS, сравнивая текущее положение и маршрут исследования, обеспечивая точное следование маршруту исследования. Управляющее устройство 15 компенсирует, в зависимости от скорости перемещения непилотируемого судна 10 и направления перемещения непилотируемого судна 10, расчетное рассогласование между положением, которое судно занимало несколько секунд назад, и маршрутом исследования на основе текущего положения.
Стадия S14
[0126] Как только команда исследования принята из системы 20 управления исследованием, исследовательское устройство 18 непилотируемого судна 10 начинает исследование и передает данные исследования в запоминающее устройство 27 и блок 28 управления дисплеем беспроводной управляющей системы 20.
Стадия S15
[0127] Запоминающее устройство 27 сохраняет данные исследования в режиме реального времени. Блок 28 управления дисплеем обрабатывает эти данные исследования и отображает их на дисплее 23. Его изображение аналогично изображению, показанному на фиг.9. Согласно этому изображению заштрихованная область G показывает, как выглядит дно водоема, в то время как область F, появившаяся между поверхностью воды и дном водоема, соответствует косяку рыб.
[0128] Как понятно из вышеизложенного, в автоматической исследовательской системе для непилотируемого судна и в способе автоматического исследования для непилотируемого судна в рамках третьего варианта выполнения настоящего изобретения исследуемую область можно задать, заставляя непилотируемое судно 10 перемещаться вокруг нее, а исследование непилотируемым судном 10 проводится на множестве маршрутов исследования, генерируемых автоматически, так чтобы можно было легко получить данные исследования для изучаемой области, что обеспечивает точный результат исследования.
[0129] Данные исследования, хранящиеся в запоминающем устройстве 27 беспроводной управляющей системы 20, передаются в компьютер 30 для анализа, в результате которого формируется карта дна водоема из контурных линий, как показано на фиг.10. Область R, которую невозможно показать контурными линиями и которая показана в виде заштрихованной области, представляет область резкого изменения глубины. Конечно, исследовательское устройство 18 оборудовано специальными датчиками, поэтому оно также хранит такие данные исследования для специфической области, как, например, значения температуры, прозрачности и степени солености воды. Изображение, отражающее результат исследования, как показано на фиг.10, может дублироваться на дисплее 23 беспроводной управляющей системой 20 путем связывания беспроводной управляющей системы 20 с компьютером 30.
Четвертый вариант выполнения изобретения
[0130] Автоматическая исследовательская система для непилотируемого судна и способ автоматического исследования для непилотируемого судна, которые описаны в рамках четвертого варианта выполнения настоящего изобретения, обеспечивают предварительное сохранение петлеобразного маршрута, который формируют путем ввода координат множества точек, окружающих исследуемую область, генерацию множества маршрутов исследования, задаваемых направлениями и интервалами в пределах петлеобразного маршрута, и автоматическое перемещение непилотируемого судна 10 по указанному множеству маршрутов исследования для проведения автоматических исследований под водой и на дне водоема. Так как интервал между соседними маршрутами исследования может быть определен произвольно, по желанию легко обеспечивается более детальное исследование, например, дна водоема, путем установки более узкого интервала между маршрутами, и можно заставить непилотируемое судно 10 совершать перемещения с узким интервалом.
[0131] Четвертый вариант выполнения настоящего изобретения отличается от третьего тем, что нет необходимости задавать область исследования, заставляя непилотируемое судно 10 фактически перемещаться, как в третьем варианте выполнения настоящего изобретения, но вместо этого сохраняют петлеобразный маршрут, вводя координаты множества точек, так чтобы маршруты исследования могли создаваться автоматически внутри указанной области исследования.
[0132] Поскольку других отличий от третьего варианта выполнения настоящего изобретения, кроме того, что маршрут исследования сохраняется заранее, нет, то описание процессов после того, как произведена генерация маршрута исследования, здесь опущено.
[0133] Хотя автоматическая исследовательская система для непилотируемого судна и способ автоматического исследования для непилотируемого судна предназначены для проведения автоматических исследований на основе текущего местоположения на маршруте исследования, определяемого системой GPS, автоматическое исследование основывается на обычном способе автоматической навигации (построение по точкам, векторное управление) при прокладке курса посредством точек изгиба и промежуточных точек для точного отслеживания маршрутов перемещения.
[0134] Настоящее изобретение обеспечивает автоматическую генерацию оптимальных маршрутов исследования в исследуемой области, обеспечивая автоматическое исследование под водой и на дне водоема при перемещении по маршруту исследования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обнаружения нефтезагрязнений в донных отложениях водоемов при помощи беспилотных летательных аппаратов | 2020 |
|
RU2748070C1 |
| СПОСОБ ПРОВЕДЕНИЯ СБОРА СЕЙСМОРАЗВЕДОЧНЫХ ДАННЫХ С ИСПОЛЬЗОВАНИЕМ БЕСПИЛОТНЫХ ВОЗДУШНЫХ СРЕДСТВ | 2022 |
|
RU2799624C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2012 |
|
RU2501708C1 |
| ОПЕРАЦИИ АРКТИЧЕСКОЙ СЕЙСМОРАЗВЕДКИ | 2014 |
|
RU2624835C2 |
| АВТОРУЛЕВОЙ СУДНА | 2011 |
|
RU2465170C1 |
| СИСТЕМА НАБЛЮДЕНИЯ ЗАТОПЛЕННЫХ РАДИОАКТИВНЫХ ОБЪЕКТОВ И СПОСОБ ЕЕ ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2770154C1 |
| Способ генерации предварительной прокладки пути судна и устройство для его реализации | 2021 |
|
RU2782617C1 |
| СИСТЕМА МОНИТОРИНГА И ЗАЩИТЫ ОТ МОРСКОЙ УГРОЗЫ | 2012 |
|
RU2549153C1 |
| НАВИГАЦИОННЫЙ ИСПЫТАТЕЛЬНЫЙ КОМПЛЕКС | 2024 |
|
RU2828932C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО ОБЪЕКТА | 2008 |
|
RU2365939C1 |
Изобретение относится к области приборостроения и может найти применение в системах автоматического управления непилотируемого судна под водой и на дне водоема при прохождении маршрутов исследования. Технический результат - расширение функциональных возможностей. Для достижения данного результата вводят реперную линию исследования и генерируют множество маршрутов исследования путем параллельного смещения реперной линии исследования на фиксированное расстояние. Затем определяют дистанции сгенерированных маршрутов исследования, задают порядок прохождения сгенерированных маршрутов исследования и автоматически перемещают непилотируемое судно согласно заданному порядку перемещения. В процессе перемещения исследуют условия, по меньшей мере, под водой или на дне водоема и отображают и сохраняют результаты исследования условий под водой или на дне водоема. 7 н. и 14 з.п. ф-лы, 17 ил.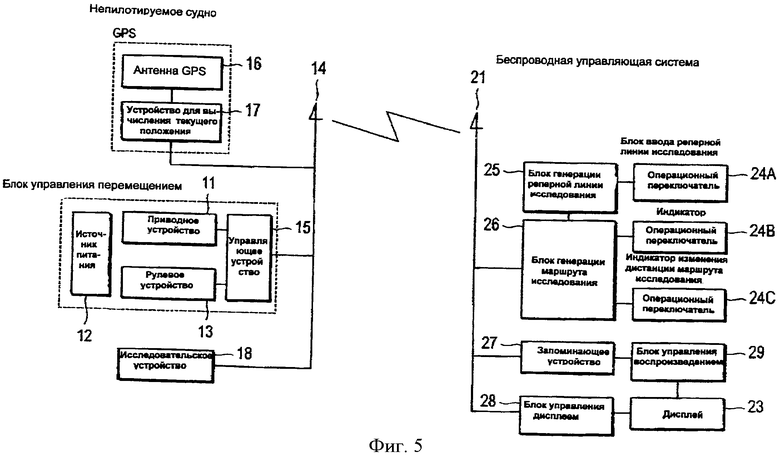
1. Автоматическая исследовательская система для непилотируемого судна, содержащая:
Глобальную систему определения местоположения (GPS), установленную на указанном непилотируемом судне, для измерения текущего положения непилотируемого судна;
блок ввода реперной линии исследования для указанного непилотируемого судна;
блок генерации маршрутов исследования для указанного непилотируемого судна на основе указанной реперной линии исследования;
блок управления перемещением непилотируемого судна путем сопоставления его текущего положения, измеренного с помощью системы GPS, и маршрута исследования, созданного блоком генерации маршрутов исследования;
исследовательское устройство для исследования условий, по меньшей мере, под водой и на дне водоема, и
запоминающее устройство для хранения данных, относящихся к условиям, по меньшей мере, под водой или на дне водоема и полученных указанным исследовательским устройством.
2. Автоматическая исследовательская система для непилотируемого судна по п.1, в которой
указанная система GPS, указанный блок управления перемещением и указанное исследовательское устройство установлены на указанном непилотируемом судне;
указанный блок ввода реперной линии исследования установлен в беспроводной управляющей системе, которая способна осуществлять связь с указанным непилотируемым судном; а оставшийся элемент установлен или в указанной беспроводной управляющей системе или в компьютере, который связан с указанной беспроводной управляющей системой, или же оба из указанных блока генерации маршрута исследования и указанного запоминающего устройства установлены либо на указанном непилотируемом судне, либо в указанной беспроводной управляющей системе, либо в указанном компьютере.
3. Автоматическая исследовательская система для непилотируемого судна по п.1, в которой
указанный блок ввода реперной линии исследования вводит начальную и конечную точки указанной реперной линии исследования с использованием широты и долготы или с использованием координат по осям X и Y двумерной системы координат со специфической точкой в качестве начала координат; и
указанный блок генерации маршрутов исследования задает маршруты исследования от введенной начальной точки до введенной конечной точки реперной линии исследования.
4. Автоматическая исследовательская система для непилотируемого судна по любому из пп.1-3, в которой
указанный блок генерации маршрутов исследования генерирует множество маршрутов исследования путем параллельного смещения указанной реперной линии исследования на фиксированный интервал относительно указанной реперной линии исследования.
5. Автоматическая исследовательская система для непилотируемого судна по любому из пп.1-3, в которой
указанный блок генерации маршрутов исследования генерирует множество маршрутов исследования путем задания прямых линий, идущих через фиксированный интервал и перпендикулярных линии исследования, которая сформирована указанной реперной линией исследования.
6. Автоматическая исследовательская система для непилотируемого судна по любому из пп.1 или 2, дополнительно содержащая:
систему выдачи команд, обеспечивающую автономное перемещение по заданным маршрутам исследования и задающую порядок перемещения по сгенерированным маршрутам исследования, при этом
указанный блок управления перемещением управляет перемещением непилотируемого судна согласно порядку перемещения, задаваемому командами из указанной системы выдачи команд, на основе сопоставления текущего положения и сгенерированного маршрута исследования.
7. Автоматическая исследовательская система для непилотируемого судна по п.1, дополнительно содержащая:
систему преобразования для изменения дистанции задаваемых маршрутов.
8. Автоматическая исследовательская система для непилотируемого судна по п.6, в которой
указанная система выдачи команд находится в указанной беспроводной управляющей системе или в указанном компьютере.
9. Автоматическая исследовательская система для непилотируемого судна по п.7, в которой
указанная система преобразования находится в указанной беспроводной управляющей системе или в указанном компьютере.
10. Автоматическая исследовательская система для непилотируемого судна по п.1, дополнительно содержащая:
блок управления дисплеем для отображения условий под водой или на дне водоема, исследованных указанным исследовательским устройством, на дисплее указанной беспроводной управляющей системы, и блок управления воспроизведением для воспроизведения условий, по меньшей мере, под водой или на дне водоема, хранящихся в указанном запоминающем устройстве.
11. Автоматическая исследовательская система для непилотируемого судна содержащая:
Глобальную систему определения местоположения (GPS), установленную на указанном непилотируемом судне, для измерения текущего положения непилотируемого судна;
устройство хранения петлеобразного маршрута, фактически пройденного на основе информации из указанной системы GPS;
блок генерации маршрутов исследования с задаваемыми направлениями и с задаваемым интервалом внутри хранящегося петлеобразного маршрута;
блок управления перемещением непилотируемого судна на основе сопоставления текущего положения, измеренного системой GPS, и маршрута исследования, сгенерированного блоком генерации маршрутов исследования;
исследовательское оборудование для исследования условий, по меньшей мере, под водой или на дне водоема, и
запоминающее устройство для хранения данных об условиях, по меньшей мере, под водой или на дне водоема, полученных указанным исследовательским устройством.
12. Автоматическая исследовательская система для непилотируемого судна по п.11, в которой
указанные задаваемые направления и задаваемый интервал задаются системой выдачи команд направления/интервала, находящейся в указанной беспроводной управляющей системе.
13. Автоматическая исследовательская система для непилотируемого судна по п.11, дополнительно содержащая:
блок управления дисплеем для отображения условий под водой или на дне водоема, исследованных указанным исследовательским устройством, на дисплее указанной беспроводной управляющей системы, и блок управления воспроизведением для воспроизведения условий, по меньшей мере, под водой или на дне водоема, хранящихся в указанном запоминающем устройстве.
14. Автоматическая исследовательская система для непилотируемого судна, содержащая:
Глобальную систему определения местоположения (GPS), установленную на указанном непилотируемом судне, для измерения текущего положения непилотируемого судна;
устройство хранения петлеобразного маршрута, сгенерированного путем ввода координат множества точек;
блок генерации маршрутов исследования с задаваемыми направлениями и с задаваемым интервалом внутри хранящегося петлеобразного маршрута; блок управления перемещением непилотируемого судна на основе сопоставления текущего положения, измеренного системой GPS, и маршрута исследования, сгенерированного блоком генерации маршрутов исследования;
исследовательское оборудование для исследования, по меньшей мере, под водой или на дне водоема, и
запоминающее устройство для хранения данных об условиях, по меньшей мере, под водой или на дне водоема, полученных указанным исследовательским устройством.
15. Автоматическая исследовательская система для непилотируемого судна по п.10, в которой
указанная система GPS, указанный блок управления перемещением и указанное исследовательское устройство установлены на указанном непилотируемом судне и
любое устройство, выбранное из указанного блока хранения маршрута, указанного блока генерации маршрутов исследования и указанного запоминающего устройства находится на указанном непилотируемом судне, в то время как другие элементы размещены в беспроводной управляющей системе или в указанном компьютере, или же указанный блок хранения маршрута, указанный блок генерации маршрутов исследования и указанное запоминающее устройство все размещены или на указанном непилотируемом судне, или в указанной беспроводной управляющей системе, или в указанном компьютере.
16. Автоматическая исследовательская система для непилотируемого судна по п.14 или 15, в которой
указанные задаваемые направления и задаваемый интервал задаются системой выдачи команд направления/интервала, находящейся в указанной беспроводной управляющей системе.
17. Автоматическая исследовательская система для непилотируемого судна по п.14, дополнительно содержащая:
блок управления дисплеем для отображения условий под водой или на дне водоема, исследованных указанным исследовательским устройством, на дисплее указанной беспроводной управляющей системы, и блок управления воспроизведением для воспроизведения условий, по меньшей мере, под водой или на дне водоема, хранящихся в указанном запоминающем устройстве.
18. Способ автоматического исследования для непилотируемого судна, включающий:
ввод реперной линии исследования для генерации маршрутов исследования,
генерацию множества маршрутов исследования путем параллельного смещения указанной реперной линии исследования на фиксированное расстояние;
задание дистанций для множества генерируемых маршрутов исследования и одновременное задание порядка перемещения по сгенерированным маршрутам исследования;
перемещение непилотируемого судна согласно заданному порядку перемещения;
исследование условий, по меньшей мере, под водой или на дне водоема в процессе перемещения указанного судна и
отображение и сохранение результатов исследования условий, по меньшей мере, под водой или на дне водоема.
19. Способ автоматического исследования для непилотируемого судна, включающий;
ввод реперной линии исследования для генерации маршрутов исследования;
генерацию множества маршрутов исследования путем задания прямых линий, идущих с фиксированным интервалом и перпендикулярно линии исследования, которая сформирована указанной реперной линией исследования;
задание дистанций для множества генерируемых маршрутов исследования и одновременное задание порядка перемещения по сгенерированным маршрутам исследования;
перемещение непилотируемого судна согласно заданному порядку перемещения;
исследование условий, по меньшей мере, под водой или на дне водоема в процессе перемещения указанного судна и
отображение и хранение результатов исследования условий, по меньшей мере, под водой или на дне водоема.
20. Способ автоматического исследования для непилотируемого судна, включающий;
сохранение маршрутов, фактически пройденных непилотируемым судном по петлеобразной траектории,
генерацию маршрутов исследования с задаваемыми направлениями и с задаваемым интервалом внутри хранящегося петлеобразного маршрута;
перемещение непилотируемого судна по сгенерированным маршрутам перемещения;
исследование условий, по меньшей мере, под водой или на дне водоема в процессе перемещения указанного судна и
отображение и хранение результатов исследования условий, по меньшей мере, под водой или на дне водоема.
21. Способ автоматического исследования для непилотируемого судна, включающий:
сохранение петлеобразного маршрута, сгенерированного путем ввода координат множества точек;
генерацию маршрутов исследования с задаваемыми направлениями и с задаваемым интервалом внутри хранящегося петлеобразного маршрута;
перемещение непилотируемого судна по сгенерированным маршрутам перемещения;
исследование условий, по меньшей мере, под водой или на дне водоема в процессе перемещения указанного судна и
отображение и хранение результатов исследования условий, по меньшей мере, под водой или на дне водоема.
| Землеройная машина | 1974 |
|
SU524882A1 |
| ПОВЫСИТЕЛЬ ДАВЛЕНИЯ | 1996 |
|
RU2119596C1 |
| US 6765499 В2, 20.07.2004 | |||
| US 6816761 В2, 09.11.2004 | |||
| СПОСОБ ИНТЕРПОЛЯЦИИ ЗНАЧЕНИЙ ПОДПИКСЕЛОВ | 2002 |
|
RU2317654C2 |
| Станд для испытания стеклодувных формовочных приборов | 1933 |
|
SU39433A1 |
| US 6765499 В2, 20.07.2004 | |||
| US 6816761 В2, 09.11.2004. | |||

