Изобретение относится к области приборостроения и может быть применено в системах навигации подвижных объектов, например, летательных аппаратов (ЛА).
В процессе работы система навигации и автоматического управления подвижного объекта - ЛА может подвергаться воздействиям, приводящим к сбоям аппаратуры и, как следствие, потере данных о параметрах движения объекта. Учитывая специфику работы бесплатформенных навигационных систем актуальной является задача прогнозирования параметров движения объекта (координаты, скорости, параметры угловой ориентации и др.) на время нахождения системы навигации в неработоспособном состоянии. Работа бесплатформенной инерциальной навигационной системы (БИНС) строится на обработке измерений инерциальных датчиков, таких как акселерометры и датчики угловой скорости (ДУС) и получении результатов в виде текущих параметров движения. Акселерометры измеряют абсолютное кажущееся линейное ускорение, ДУС измеряют абсолютную угловую скорость. Параметрами движения, определяемыми БИНС, являются вектор скорости движения ЛА, координаты положения и угловая ориентация ЛА в пространстве. Принцип построения инерциальных навигационных систем известен и описан в технической литературе [David Н. Titterton and John L. Weston Strapdown Inertial Navigation Technology - 2n edition / The Institution of Electrical Engeeners, 2004, Навигация летательных аппаратов в околоземном пространстве. Августов Л.И., Бабиченко А.В., Орехов М.И., Сухоруков С.Я., Шкред В.К. Под ред. Г.И. Джанджгавы. - М.: «Научтехлитиздат», 2015, 592 с.]. Как правило, в состав БИНС входят бортовой вычислитель и блок чувствительных элементов (БЧЭ). В состав БЧЭ входят акселерометры и ДУС. В вычислителе под управлением рабочей программы реализуется алгоритм обработки данных с акселерометров и ДУС, и формируются текущие параметры движения, при этом для приведения БИНС в исходное (начальное) состояние осуществляется процедура, известная как начальная выставка. В результате начальной выставки определяется корректная угловая ориентация ЛА относительно системы координат, в которой осуществляется определение текущих параметров движения, что позволяет корректно определять остальные параметры движения (скорости и координаты). Начальная выставка предполагает получение необходимой информации от внешнего источника и является итерационным процессом, который заканчивается при достижении ошибки выставки, обеспечивающей требуемую точность определения параметров движения. После завершения выставки БИНС осуществляет автономное определение текущих параметров движения ЛА: углов ориентации (рысканье, тангаж, крен), скоростей движения ЛА. Процесс определения текущих параметров движения является итерационным и использует параметры движения, полученные на предыдущем шаге. БИНС ЛА, автономно определяющая текущие параметры движения в полете, лишена дополнительной информационной поддержки от внешнего источника, как это могло бы быть при проведении начальной выставки по данным от внешней навигационной системы. При наступлении сбоя в работе навигационной аппаратуры ЛА в полете необходимо предпринять меры, обеспечивающие максимально быстрое восстановление работоспособности БИНС.
Из уровня техники известен способ определения пространственной ориентации и курса ЛА, описанный в изобретении под названием «Система для определения пространственного положения курса летательного аппарата» [патент РФ 2427799, G01C 21/00, опубл. 27.08.2011 г.], в котором используют информацию с датчиков угловой скорости и датчиков линейного ускорения, по которой в полете посредством вычислительного устройства определяют углы ориентации летательного аппарата в пространстве, в полете при кратковременном отключении напряжения питания после его восстановления при вычислении углов ориентации восстанавливают истинные значения углов по информации с указанных датчиков.
В данном способе для определения параметров движения ЛА в режиме полета также используют трехкомпонентный магнитометр, определяют углы ориентации (крен, тангаж и гиромагнитный курс) ЛА в пространстве. Также с использованием дополнительного бортового оборудования, преобразователей и логического устройства анализируют сигнал о признаке нахождения ЛА на земле или в полете. В случае выдачи сигнала нахождения на земле, система автоматически переходит в режим начальной выставки. В случае выдачи сигнала нахождения в полете проведение начальной выставки блокируется и производится ускоренное угловое согласование с использованием данных о смещении нулевых сигналов датчиков угловых скоростей, записанных заранее в устройство хранения, также используется вычисленный магнитный курс и данные с датчиков ускорения.
Предложенный способ позволяет парировать сбои в работе навигационно-пилотажного оборудования ЛА как на земле, так и в полете.
Однако недостатками данного способа является то, что не определяются и не восстанавливаются такие параметры движения как: составляющие скорости движения ЛА, координаты ЛА в пространстве (широта, долгота, высота), что ограничивает область применения, так как не позволяет применять данное устройство в системах управления автономных беспилотных ЛА, в задачи которых входит движение в заданную точку в пространстве. Кроме того, проведение начальной выставки происходит на земле, что исключает возможность использования данного способа для летательных аппаратов, в которых выставка инерциальных навигационных систем осуществляется в полете. Отсутствие системы аварийного перезапуска не позволяет восстановить работу в случае сбоя, не связанного с кратковременным пропаданием питания, например, при «зависании» бортового вычислителя из-за внешних воздействий.
Известен способ определения пространственного утла курса летательного аппарата [патент РФ 2505786, МПК G01C 23/00, опубл. 27.10.2014 г, бюл. №3.], принятый за прототип и заключающийся в том, что используют информацию с датчиков угловой скорости и датчиков линейного ускорения, по указанной информации в полете посредством вычислительного устройства определяют текущие параметры движения летательного аппарата, в случае сбоя вычислительного устройства производят восстановление работоспособности системы.
В данном способе для определения пространственного угла курса летательного аппарата используют, как и в предыдущем аналоге, трехкомпонентный магнитометр. По информации от датчиков угловой скорости и датчиков линейного ускорения и трехкомпонентного магнитометра определяют истинные значения углов ориентации ЛА. Для парирования кратковременного пропадания питания формируют признак нахождения ЛА на земле или в полете, а также используют тарировочные характеристики датчиков с учетом изменения температуры окружающей среды. Использование тарировочных характеристик повышает точность определения угла курса ЛА в сравнении с вышеприведенным аналогом. Если кратковременное отключение напряжения питания произошло в полете во время маневрирования, то ЛА выводят на горизонтальный прямолинейный участок полета без ускорения и активизируют режим ускоренной коррекции, при котором согласуют углы, вычисленные по информации с блока датчиков угловой скорости, с углами, вычисленными по информации с блока датчиков линейного ускорения и трехкомпонентного магнитометра. Режим ускоренной коррекции активизируется пилотом ЛА. Предложенный способ позволяет увеличить точность определения углов ориентации ЛА по сравнению с выше приведенным аналогом, позволяет избавиться от необходимости проводить режим начальной выставки, если сбой в работе системы произошел в полете.
Однако прототип также не лишен недостатков, основным из которых является то, что для приведения навигационной системы в рабочее состояние необходимо вывести ЛА в горизонтальный полет без ускорений и активизировать режим ускоренной коррекции с участием пилота, что не позволяет использовать данный способ на беспилотных ЛА, неоснащенных двигателем, поскольку в таком случае обеспечение горизонтального полета ЛА без ускорений может быть затруднительным или невозможным в зависимости от условий движения на момент возникновения сбоя. Как и в предыдущем способе, проведение начальной выставки происходит на земле, что исключает возможность использования данного способа для летательных аппаратов, питание на которые подается в полете и которые вынуждены процедуру начальной выставки осуществлять в воздухе. Также как и в предыдущем способе, отсутствие системы аварийного перезапуска не позволяет восстановить работу в случае сбоя, не связанного с кратковременным пропаданием питания, например, при «зависании» бортового вычислителя из-за внешних воздействий. Для проведения ускоренной коррекции необходимо участие пилота, что ограничивает область применения данного способа и не позволяет применять его в беспилотных ЛА.
Задачей и техническим результатом, на достижение которого направлено предлагаемое изобретение, является повышение надежности работы навигационной системы летательного аппарата за счет восстановления ее рабочего состояния после сбоя («зависания») бортового вычислителя вследствие воздействия внешних факторов без снятия питания с приборов, входящих в ее состав.
Технический результат достигается тем, что способ восстановления работоспособности бесплатформенной инерциальной навигационной системы после сбоя аппаратуры, заключающийся в том, что используют информацию с датчиков угловой скорости и датчиков линейного ускорения, по которой в полете посредством вычислительного устройства определяют текущие параметры движения летательного аппарата, при сбое вычислительного устройства производят восстановление работоспособности системы, согласно изобретению в качестве вычислительного устройства используют одно- или двухпроцессорный вычислитель, оснащенный стойкими к внешним воздействующим факторам модулем хранения данных, устройством аварийного перезапуска и регистрами, сохраняющими свое состояние при аварийном перезапуске, предварительно посредством указанного вычислительного устройства настраивают временные параметры аварийного перезапуска, при определении текущих параметров рассчитывают прогнозируемые параметры движения, которые сохраняют в модуле хранения данных, причем рассчитывают прогнозируемые параметры движения на время нахождения системы в неработоспособном состоянии с помощью экстраполирующего полинома, коэффициенты которого определяют с помощью метода наименьших квадратов, при сбое вычислительного устройства осуществляют его аварийный перезапуск, а для восстановления текущих параметров движения используют данные с прогнозируемыми значениями параметров движения.
Использование в качестве вычислительного устройства одно- или двухпроцессорного вычислителя, оснащенного стойкими к внешним воздействующим факторам модулем хранения данных, устройством аварийного перезапуска, обеспечивает «сброс» вычислителя без снятия питания после сбоя аппаратуры вследствие воздействия внешних факторов.
Применяемые в вычислителе процессора регистры, сохраняющие свое состояние при перезапуске системы, позволяют идентифицировать факт аварийного перезапуска и принять решение о необходимости восстановления текущих параметров движения.
Предварительная настройка временных параметров аварийного перезапуска посредством вычислительного устройства, а затем расчет прогнозируемых параметров движения при определении текущих параметров и сохранении в модуле хранения прогнозируемых параметров движения, причем рассчитывают прогнозируемые параметры движения на время нахождения системы в неработоспособном состоянии с помощью экстраполирующего полинома, коэффициенты которого определяют с помощью метода наименьших квадратов, позволяет осуществить восстановление работоспособности системы максимально быстро путем чтения текущих параметров движения из модуля хранения без проведения начальной выставки или ускоренной коррекции угла курса.
Осуществление при сбое вычислительного устройства его аварийного перезапуска, после чего использование для восстановления текущих параметров движения данных с прогнозируемыми значениями параметров движения дает возможность максимально быстро получить текущие параметры движения без проведения начальной выставки или ускоренной коррекции угла курса.
Применение независимого канала электроснабжения позволяет повысить надежность работы навигационной системы ЛА за счет восстановления ее рабочего состояния после сбоя («зависания») бортового вычислителя вследствие воздействия внешних факторов без снятия питания с приборов, входящих в ее состав, так как позволяет осуществить «запитывание» бортовой аппаратуры при отключении питания от системы электроснабжения ЛА и обеспечивает восстановление работоспособности после сбоя в работе аппаратуры, участвующей в определении текущих параметров движения ЛА.
Наличие в заявляемом изобретении признаков, отличающих его от прототипа, позволяет считать его соответствующим условию «новизна».
Новые признаки не выявлены в технических решениях аналогичного назначения. На этом основании можно сделать вывод о соответствии заявляемого изобретения условию «изобретательский уровень».
Изобретение иллюстрируется чертежами:
на фиг. 1 представлена структурная схема БИНС, где над стрелкой, идущей от БЧЭ к вычислителю, показаны измерения инерциальных датчиков (nx, ny, nz, wx, wy, wz), поступающие в вычислитель для обработки, а над стрелкой, идущей от вычислителя - текущие параметры движения ЛА (Ψ, υ, γ, Vx, Vy, Vz, В, L, Н), рассчитанные вычислителем.
на фиг. 2 представлена схема информационных связей двухпроцессорного вычислителя;
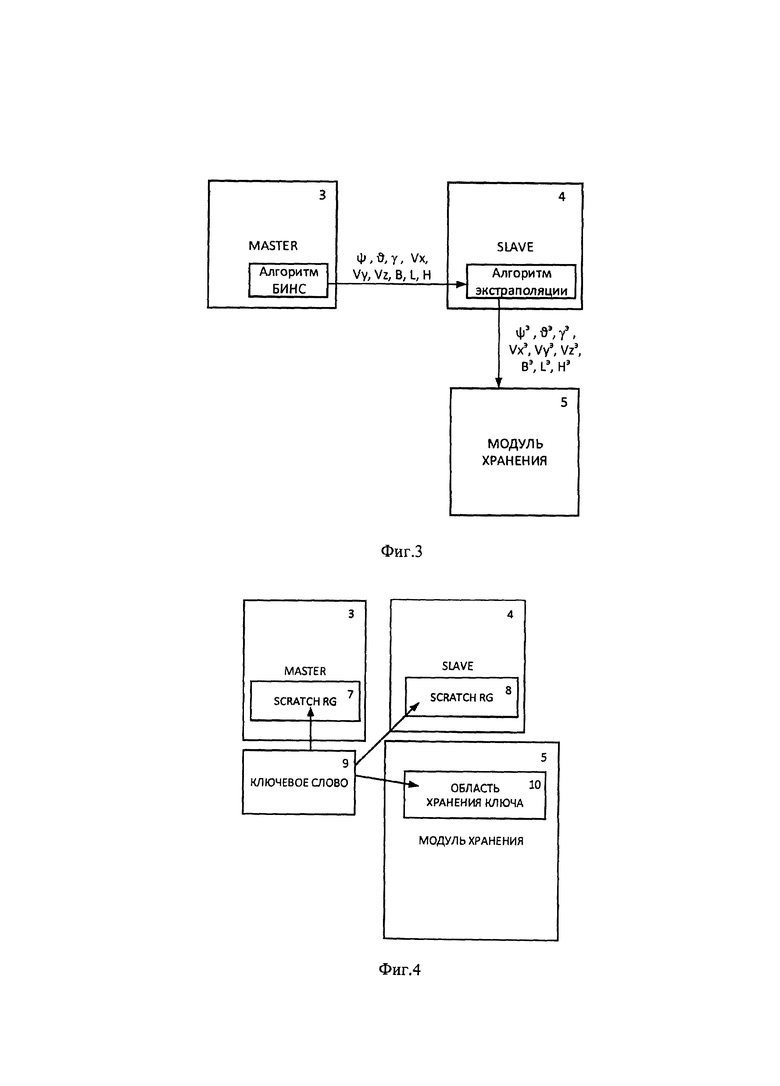
на фиг. 3 представлена схема передачи данных между ведущим (MASTER) процессором, подчиненным (SLAVE) процессором и модулем хранения (стрелками показана передача данных с текущими параметрами движения (Ψ, υ, γ, Vx, Vy, Vz, В, L, Н) от ведущего к ведомому процессору и передача прогнозируемых параметров движения (Ψэ, υэ, γэ, Vxэ, Vyэ, Vzэ, Вэ, Lэ, Нэ) из ведомого процессора в модуль хранения);
на фиг. 4 приведена схема, иллюстрирующая одновременную запись ключевого слова в регистры, сохраняющие свое состояние, и в модуль хранения;
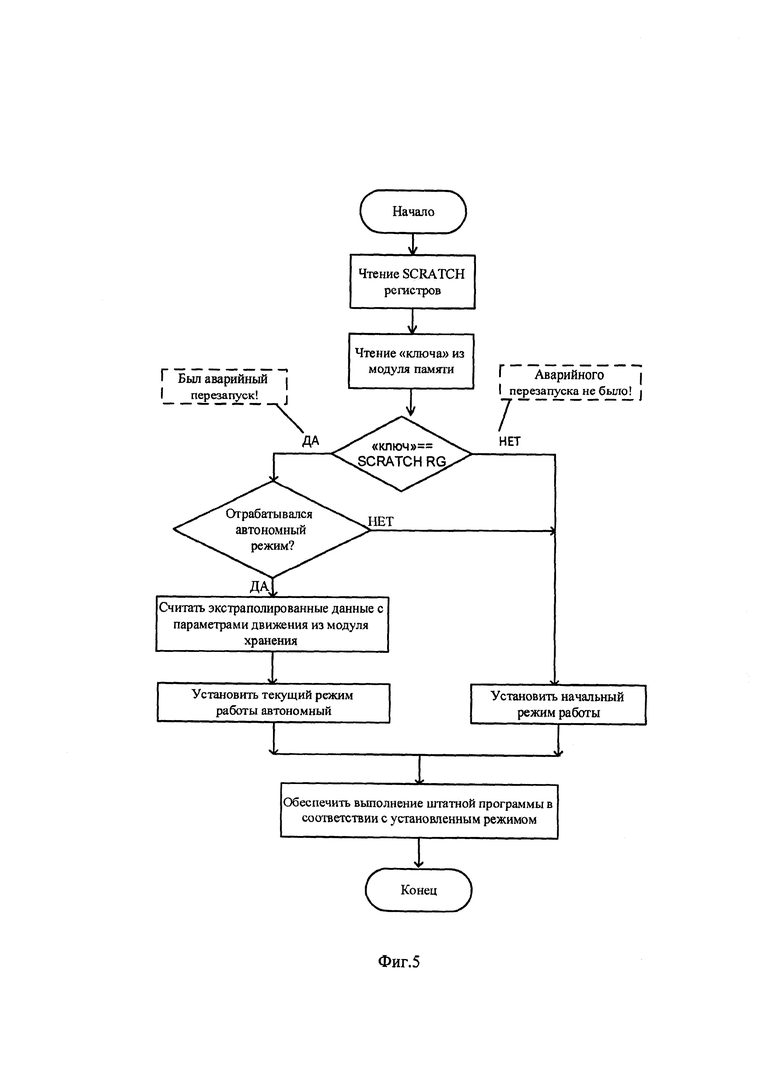
на фиг. 3 представлен алгоритм программы действий осуществления заявляемого способа.
Способ восстановления работоспособности бесплатформенной инерциальной навигационной системы (БИНС) после сбоя аппаратуры реализуется следующим образом: используют информацию с датчиков угловой скорости и датчиков линейного ускорения, по которой в полете посредством вычислительного устройства определяют текущие параметры движения летательного аппарата, при сбое вычислительного устройства производят восстановление работоспособности системы. В качестве вычислительного устройства используют одно- или двухпроцессорный вычислитель, оснащенный стойкими к внешним воздействующим факторам модулем хранения данных, устройством аварийного перезапуска и регистрами, сохраняющими свое состояние при аварийном перезапуске.
Как правило, в состав БИНС (фиг. 1) входят блок чувствительных элементов 1 (БЧЭ) и бортовой вычислитель 2. В случае использования вычислителя с одним процессором производят расчет текущих параметров движения (угловая ориентация, компоненты вектора скорости и координаты нахождения ЛА в пространстве) и выполняют их прогнозирующую экстраполяцию, таким образом, чтобы получить прогнозируемые параметры на момент завершения аварийного перезапуска системы в случае сбоя. Рассмотрим случай использования двухпроцессорного вычислителя (фиг. 2-4). В данном случае первый процессор 3 выполняет роль ведущего (MASTER) для обеспечения выполнения штатной работы БИНС, а именно для расчета текущих параметров движения ЛА (угловая ориентация, компоненты вектора скорости и координаты нахождения ЛА в пространстве). Второй процессор 4 выполняет функцию ведомого (SLAVE) и используется для экстраполяции текущих параметров движения таким образом, чтобы получить прогнозируемые параметры на момент завершения аварийного перезапуска системы в случае сбоя. Использование двух процессоров позволяет «распараллелить» выполнение задач определения текущих параметров движения и задачи, связанных с расчетом прогнозируемых параметров. Двухпроцессорный вычислитель оснащен стойким к внешним воздействующим факторам модулем хранения данных 5 и устройством аварийного перезапуска 6, обеспечивающим «сброс» вычислителя без снятия питания. Применяемые в одно- и двухпроцессорном вычислителе процессоры оснащены регистрами 7 и 7, 8 соответственно, которые сохраняют свое состояние при перезапуске системы, но изменяют его при снятии и подаче питания, например, как это реализовано в SCRATCH-регистрах процессора 5890ВЕ1 [МИКРОСХЕМА ИНТЕГРАЛЬНАЯ 5890ВЕ1Т Указания по применению ЮКСУ.431288.001Д4]. Предварительно посредством указанного вычислительного устройства настраивают временные параметры аварийного перезапуска. При определении текущих параметров рассчитывают прогнозируемые параметры движения, которые сохраняют в модуле хранения данных, причем рассчитывают прогнозируемые параметры движения на время нахождения системы в неработоспособном состоянии с помощью экстраполирующего полинома, коэффициенты которого определяют с помощью метода наименьших квадратов. При сбое вычислительного устройства осуществляют его аварийный перезапуск, а для восстановления текущих параметров движения используют данные с прогнозируемыми значениями параметров движения.
Прогнозирующая экстраполяция осуществляется при помощи полинома, коэффициенты которого определяются с помощью метода наименьших квадратов (МНК). Общий вид полинома приведен ниже:
ϕ(х)=а0+а1х+а2х2…+anxn.
Согласно методу МНК для нахождения коэффициентов полинома а0…an необходимо минимизировать функционал
где: xi - эмпирические данные (в нашем случае время);
yi - эмпирические данные, связанные с xi (в нашем случае параметры движения, определенные по алгоритму БИНС).
Для минимизации берут производную от функционала и приравнивают ее к нулю. В результате чего получается система уравнений, которая в матричной форме имеет вид:
Ха=Y.
Решение данной системы относительно искомых коэффициентов имеет вид:
а=X-1Y,
где: X=ФТФ - матрица системы уравнений,
Y=ФТу,
 - вектор эмпирических данных,
- вектор эмпирических данных,
 - вектор эмпирических данных, связанных с х.
- вектор эмпирических данных, связанных с х.
Использование в качестве эмпирических данных х значений времени, в которые были определены соответствующие параметры движения у приводит к вырождения матрицы X, что в свою очередь приводит к большим ошибкам определения коэффициентов полинома и как следствие к неверному определению экстраполируемого параметра ϕ(x).
Для БИНС, определяющей параметры движения с заданным периодом, предлагается при построении матрицы системы осуществлять замену эмпирических данных x на значения х*, являющиеся константами, равномерно распределенными как в отрицательной, так и в положительной области таким образом, чтобы число обусловленности матрицы системы удовлетворяло условию:
1<||X||1⋅||X-1||1<100,
||X||1⋅||Х-1||1 - число обусловленности,
||X||1 - первая норма матрицы,
||X-1||1 - первая норма обратной матрицы.
Выполнение данного условия будет говорить о хорошей обусловленности и отсутствии вырожденности матрицы системы.
Так как компоненты вектора х* являются константами, то, поскольку матрица системы X формируется из элементов вектора х*, она также будет состоять из констант. Это, в свою очередь, позволяет ускорить вычисление коэффициентов полинома.
Например, если имеется четыре измерения какого-либо параметра  и необходимо спрогнозировать пятое значение, то вектор эмпирических данных
и необходимо спрогнозировать пятое значение, то вектор эмпирических данных  обеспечит формирование обратной матрицы системы состоящей из констант, например для квадратичного полинома обратная матрица будет иметь вид:
обеспечит формирование обратной матрицы системы состоящей из констант, например для квадратичного полинома обратная матрица будет иметь вид:
 а искомые коэффициенты полинома будут найдены, как
а искомые коэффициенты полинома будут найдены, как

где: Х11, Х13, X22, Х31, X33 - соответствующие элементы матрицы X-1,
Ф13, Ф23, Ф42, Ф32, Ф13, Ф23 - соответствующие элементы матрицы
При этом при нахождении прогноза с использованием квадратичного полинома ϕ(х)=а0+а1х+а2х2, коэффициенты которого найдены описанным выше способом, вместо текущего значения х в формулу полинома подставляется следующее равноудаленное от крайнего значение х*. Для приведенного примера х*=1,975.
Прогнозируемые параметры сохраняются в модуле хранения данных 5 (фиг. 3).
В область хранения ключа 10 модуля хранения 5 и регистры 7, 8, сохраняющие свое состояние после перезапуска процессоров 3, 4, записывается специальное ключевое слово 9 (фиг. 4), позволяющее отличить аварийный перезапуск вычислителя от подачи питания. Устройство аварийного перезапуска 6 обеспечивает повторный запуск вычислителя 2 в случае его «зависания».
В вычислитель 2 загружается программа, оперирующая его ресурсами - ведущим 3 и ведомым 4 процессорами, устройством аварийного перезапуска 6 и модулем хранения данных 5.
Алгоритм работы программы осуществления способа (фиг. 5) содержит две основные функциональные ветви, одна из которых реализует штатную работу системы до сбоя, а вторая - аварийное восстановление текущего состояния. Подача питания или сброс вычислителя, в том числе аварийный перезапуск, заставляют алгоритм выполняться с самого начала. В начале работы алгоритм анализирует состояние регистров 7, 8, сохраняющих свое состояние, и определенных областей памяти модуля хранения 5 и устанавливает факт подачи питания или аварийного перезапуска. В случае установления факта, что аварийного перезапуска не осуществлялось (регистры и специальные области памяти модуля хранения данных не совпадают или не содержат специальной информации, соответствующей ключевому слову 9), алгоритм инициирует начало штатной работы системы, формирует ключевое слово 9 и записывает его в регистры 7, 8, сохраняющие свое состояние, и специальную область памяти 10 в модуле хранения 5. После чего приступает к последовательному выполнению начальной выставки, а затем переходит к автономному определению текущих параметров движения. При этом алгоритм производит инициализацию таймера аварийного перезапуска таким образом, чтобы обеспечивался перезапуск вычислителя при длительности «зависания», превышающей заданный интервал времени, на этот же интервал времени определяется прогноз параметров движения. При этом алгоритм обеспечивает формирование данных в модуле хранения 5, отражающих факт того, что велась работа в режиме начальной выставки или в режиме автономной работы БИНС. В режиме автономной работы БИНС (после прохождения процедуры начальной выставки) на базе ведущего процессора 3 осуществляется расчет текущих параметров движения, которые передаются в ведомый процессор 4, где осуществляется расчет прогнозных параметров движения путем экстраполяция текущих параметров на время окончания перезапуска вычислителя. В случае установления факта, что был аварийный перезапуск (совпадение ключевой информации регистров и определенных областей памяти модуля хранения), алгоритм инициирует аварийное восстановление работы системы. Считывает информацию из модуля хранения, с данными о том, в каком режиме работы находилась БИНС. Если БИНС не находилась в режиме автономного определения параметров движения, то алгоритм обеспечивает повторный запуск штатной ветки работы - начинает последовательно выполнять работу в режиме начальной выставки, после чего переходит в автономный режим. Если на момент сбоя вычислитель отрабатывал автономный режим, то алгоритм считает из памяти прогнозируемые параметры движения, определит их как исходные, и продолжит расчет текущих параметров движения.
Применение независимого канала электроснабжения позволяет повысить надежность навигационной системы ЛА, так как позволяет осуществить «запитывание» бортовой аппаратуры при отключении питания от системы электроснабжения ЛА и обеспечивает восстановление работоспособности после сбоя в работе аппаратуры, участвующей в определении текущих параметров движения ЛА, что достигается путем введения в состав системы независимого канала электроснабжения, например, аккумуляторной батареи с электрической изоляцией от цепей питания основного канала электроснабжения с помощью диодных развязок, согласно ГОСТ Р 54073-2017.
Таким образом, предложенный способ повышает надежность навигационной системы как пилотируемого, так и беспилотного ЛА, так как позволяет осуществить «запитывание» аппаратуры при отключении питания от системы электроснабжения ЛА и обеспечивает восстановление работоспособности после сбоя в работе вследствие воздействия внешних факторов аппаратуры, участвующей в определении текущих параметров движения ЛА.
Представленные сведения свидетельствуют о выполнении при использовании заявляемого изобретения следующей совокупности условий:
- средство, воплощающее заявляемый способ при его осуществлении, относится к области приборостроения и может быть применено в системах навигации подвижных объектов, например, ЛА;
- повышение надежности работы навигационной системы ЛА за счет восстановления ее рабочего состояния после сбоя бортового вычислителя вследствие воздействия внешних факторов без снятия питания с приборов, входящих в ее состав;
- для заявляемого способа в том виде, в котором он охарактеризован в формуле изобретения, подтверждена возможность его осуществления с помощью описанных в заявке и известных до даты приоритета средств и методов.
Следовательно, заявляемое изобретение соответствует условию «промышленная применимость».
| название | год | авторы | номер документа |
|---|---|---|---|
| Самоорганизующийся навигационный комплекс | 2016 |
|
RU2640964C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОДГОТОВКИ И НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2434202C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2592715C1 |
| Способ формирования самоорганизующейся структуры навигационного комплекса | 2016 |
|
RU2635825C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ РОБОТИЗИРОВАННОГО БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА В АВТОНОМНОМ РЕЖИМЕ | 2020 |
|
RU2733453C1 |
| Астроинерциальная навигационная система с коррекцией по гравитационному полю Земли | 2023 |
|
RU2820600C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2014 |
|
RU2607197C2 |
| СИСТЕМА УПРАВЛЕНИЯ В ПРОДОЛЬНОМ КАНАЛЕ ПИЛОТИРУЕМЫХ И БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ В РЕЖИМЕ УВОДА С ОПАСНОЙ ВЫСОТЫ ПРИ РАБОТЕ ПО НАЗЕМНЫМ ОБЪЕКТАМ | 2016 |
|
RU2644048C2 |
| Способ астрономической коррекции навигационных параметров летательного аппарата | 2021 |
|
RU2767449C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ | 2014 |
|
RU2564379C1 |

Изобретение относится к области приборостроения и может быть применено в системах навигации подвижных объектов, например летательных аппаратов (ЛА). Способ восстановления работоспособности бесплатформенной инерциальной навигационной системы после сбоя аппаратуры заключается в том, что используют информацию с датчиков угловой скорости и датчиков линейного ускорения, по которой в полете посредством вычислительного устройства определяют текущие параметры движения летательного аппарата, при сбое вычислительного устройства производят восстановление работоспособности системы. В качестве вычислительного устройства используют одно- или двухпроцессорный вычислитель, оснащенный стойкими к внешним воздействующим факторам модулем хранения данных, устройством аварийного перезапуска и регистрами, сохраняющими свое состояние при аварийном перезапуске. Предварительно посредством указанного вычислительного устройства настраивают временные параметры аварийного перезапуска. При определении текущих параметров рассчитывают прогнозируемые параметры движения, которые сохраняют в модуле хранения данных. Рассчитывают прогнозируемые параметры движения с помощью экстраполирующего полинома, коэффициенты которого определяют с помощью метода наименьших квадратов. При сбое вычислительного устройства осуществляют его аварийный перезапуск, а для восстановления текущих параметров движения используют данные с прогнозируемыми значениями параметров движения. Технический результат - повышение надежности работы навигационной системы летательного аппарата. 5 ил.
Способ восстановления работоспособности бесплатформенной инерциальной навигационной системы после сбоя аппаратуры, заключающийся в том, что используют информацию с датчиков угловой скорости и датчиков линейного ускорения, по которой в полете посредством вычислительного устройства определяют текущие параметры движения летательного аппарата, при сбое вычислительного устройства производят восстановление работоспособности системы, отличающийся тем, что в качестве вычислительного устройства используют одно- или двухпроцессорный вычислитель, оснащенный стойкими к внешним воздействующим факторам модулем хранения данных, устройством аварийного перезапуска и регистрами, сохраняющими свое состояние при аварийном перезапуске, предварительно посредством указанного вычислительного устройства настраивают временные параметры аварийного перезапуска, при определении текущих параметров рассчитывают прогнозируемые параметры движения, которые сохраняют в модуле хранения данных, причем рассчитывают прогнозируемые параметры движения с помощью экстраполирующего полинома, коэффициенты которого определяют с помощью метода наименьших квадратов, при сбое вычислительного устройства осуществляют его аварийный перезапуск, а для восстановления текущих параметров движения используют данные с прогнозируемыми значениями параметров движения.
| Способ восстановления параметров движения летательного аппарата | 2016 |
|
RU2620786C1 |
| КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 1995 |
|
RU2116666C1 |
| CN 0106840196 A, 13.06.2017 | |||
| CN 0111272175 A, 12.06.2020. | |||

