Предлагаемое изобретение относится к навигации и может быть использовано, в частности, при навигации морских и речных судов для формирования навигационных данных объекта (данных о положении, проекциях скорости и углах ориентации судна в горизонтной системе координат).
Известен способ формирования навигационных данных путем интеграции сигналов навигационных данных инерциальной навигационной системой (ИНС) и сигналов навигационных данных о положении и скорости объекта относительно одной антенны спутникового приемника глобальной навигационной системы GPS и корректировки исходных сигналов по результатам интеграции (см. патент США №6408245, МПК G06G 7/78, НКИ 701/216).
В указанном способе интеграция сигналов ИНС и спутникового приемника осуществляется путем одновременной их фильтрации в двух локальных фильтрах с различными элементами векторов состояния и последующей фильтрации выходных сигналов локальных фильтров в фильтре Калмана. При этом первый локальный фильтр имеет размерность 15 и включает следующие элементы ошибки ИНС:
- 3 - по скорости,
- 3 - по ориентации,
- 3 - по положению,
- 3 - по дрейфам гироскопов,
- 3 - по ошибкам акселерометров.
Второй локальный фильтр включает 15 элементов вектора состояния первого фильтра и 3 элемента положения по данным GPS-приемника.
Известен способ формирования навигационных данных, основанный на формировании сигналов данных объекта от ИНС и от двухантенного спутникового приемника GPS и корректировки исходных сигналов по результатам интеграции (см. пат. США №5657025, МПК G01S 5/02, НКИ 342/357 - принято за прототип).
В указанном способе, как и в аналоге, интеграция сигналов ИНС и спутникового приемника (положение, скорость, курс) осуществляется в фильтре Калмана с количеством используемых в нем составляющих вектора состояния 15 и более.
Общим недостатком как аналога, так и прототипа являются большие вычислительные затраты при обработке сигналов по алгоритмам фильтров Калмана с размерностью вектора состояния, большей 15, и неустойчивость вычислительного процесса при непрерывной работе фильтров более 100 ч, что ограничивает точность непрерывного формирования навигационных данных.
Техническая задача, решаемая заявленным способом - исключение процессов фильтрации сигналов ИНС и спутникового приемника в фильтрах Калмана высоких порядков (15 и более), что позволяет повысить устойчивость и непрерывность вычислительных процессов и, соответственно, точность непрерывного формирования навигационных данных объекта.
Указанная задача решается тем, что в способе формирования навигационных данных объекта путем интеграции сигналов навигационных данных от ИНС и от спутникового приемника и корректировки исходных сигналов ИНС по результатам интеграции интеграцию осуществляют путем формированием разностей сигналов одноименных навигационных параметров от ИНС и мультиантенного спутникового приемника и последующего сглаживания по времени полученных разностей с постоянной времени, равной или большей интервала коррекции погрешностей спутникового приемника, а корректировку исходных данных ИНС осуществляют суммированием сглаженных сигналов разностей навигационных параметров с соответствующими сигналами ИНС.
Сущность заявленного способа поясняется чертежом, где обозначены:
1 - мультиантенный спутниковый приемник;
2 - инерциальная навигационная система;
31-3n - устройства формирования разностей одноименных навигационных параметров;
41-4n - сглаживающие устройства;
51-5n - устройства суммирования.
Количество навигационных параметров n определяется требованиями к конкретной системе, реализующей способ, и может достигать 9, в том числе:
- 3 - характеризующих положение объекта (например, широта, долгота, высота);
- 3 - характеризующих скорость движения объекта (например, северная, восточная и вертикальная составляющие скорости);
- 3 - характеризующих ориентацию объекта (например, курс, угол крена, угол дифферента/тангажа).
По каждому из n одноименных навигационных параметров одновременно выполняются действия в следующей последовательности: в устройствах формирования разностей 31-3n формируются разности между данными мультиатенного спутникового приемника 1 и инерциальной навигационной системы 2;
- разности от 31-3n поступают на входы соответствующих сглаживающих устройств 4l-4n, а с их выхода сглаженные значения разностей поступают на устройства суммирования 5l-5n для суммирования с данными, полученными от ИНС 2. При этом, т.к. погрешности данных от спутникового приемника 1 имеют высокую частоту собственных изменений, они эффективно фильтруются сглаживающими устройствами 4 при постоянной времени сглаживающих устройств 4≈0,5÷5 минут, что соответствует или превышает интервал коррекции погрешностей спутникового приемника 1. Следовательно, на выходе сглаживающих устройств 4 погрешности от спутникового приемника 1 будут уменьшены, погрешности от ИНС 2, медленно меняющиеся во времени, будут проходить сглаживающие устройства 4 без изменений. На суммирующие устройства 5 погрешности ИНС 2 будут поступать с разными знаками и, следовательно, компенсироваться.
При кратковременных перерывах в работе мультиантенного спутникового приемника на выходе ИНС можно использовать ранее полученные в сглаживающем устройстве оценки погрешностей ИНС.
Несмотря на то что степень компенсации погрешностей сглаживающими устройствами будем меньшей, чем при использовании оптимального фильтра Калмана, при реализации предлагаемого способа формирования навигационных данных объекта на значительных временных интервалах (100 ч и более) происходит резкое снижение вычислительных затрат на интеграцию и повышается устойчивость вычислительных процессов в сравнении с реализацией оптимального фильтра Калмана (порядка 15 и более), в результате чего повышается точность непрерывного формирования данных.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ДЛЯ ВЫРАБОТКИ ПАРАМЕТРОВ УГЛОВОЙ ОРИЕНТАЦИИ КОРПУСА СУДНА | 2014 |
|
RU2573119C2 |
| СПОСОБ ИНТЕГРАЦИИ НАВИГАЦИОННОЙ ИНФОРМАЦИИ И САМОИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2009 |
|
RU2386108C1 |
| СПОСОБ КОМПЛЕКСИРОВАНИЯ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ И КОМБИНИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1993 |
|
RU2082098C1 |
| ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1998 |
|
RU2148796C1 |
| Способ навигации с интеграцией систем и средств обеспечения сквозного позиционирования повышенной точности и устойчивости к помехам | 2023 |
|
RU2836625C1 |
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ О ПЕРЕМЕЩЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2436047C1 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ | 2011 |
|
RU2462690C1 |
| Способ навигации с использованием высокоточного абонентского терминала и высокоточный абонентский терминал | 2023 |
|
RU2832572C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2019 |
|
RU2725029C1 |
| КОМПЛЕКСИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА НАВИГАЦИИ НА "ГРУБЫХ" ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТАХ | 2008 |
|
RU2380656C1 |
Изобретение относится к области приборостроения и может быть использовано в позиционных системах ориентации подвижных объектов различной физической природы. Технический результат - расширение функциональных возможностей. Для достижения данного результата осуществляют формирование разности сигналов одноименных параметров от инерциальной навигационной системы и мультиантенного спутникового приемника и сглаживание разностей по времени с постоянной времени, равной или превышающей интервал коррекции погрешностей мультиантенного спутникового приемника. При этом осуществляют суммирование сглаженных сигналов и соответствующих сигналов инерциальной навигационной системы. Это позволяет осуществить компенсацию медленно меняющихся погрешностей инерциальной навигационной системы, а результирующий сигнал будет содержать только сглаженные погрешности от спутникового приемника. 1 ил.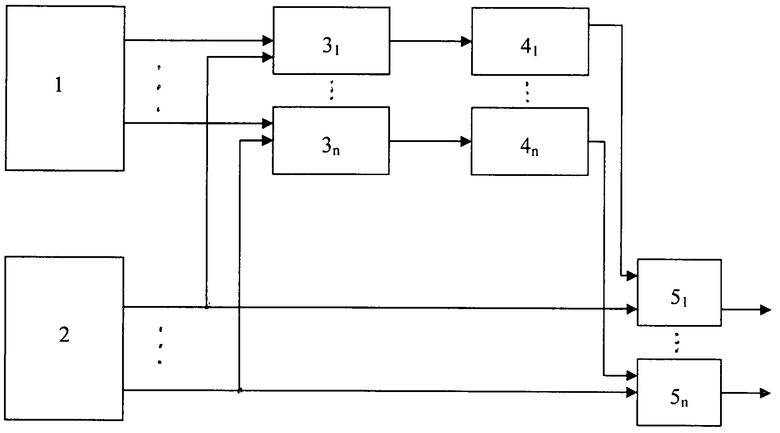
Способ формирования навигационных данных объекта путем интеграции сигналов навигационных данных от инерциальной навигационной системы и от спутникового приемника и корректировки исходных сигналов инерциальной навигационной системы по результатам интеграции, отличающийся тем, что интеграцию осуществляют путем формирования разностей сигналов одноименных навигационных параметров от инерциальной навигационной системы и мультиантенного спутникового приемника и последующего сглаживания по времени полученных разностей с постоянной времени, равной или большей интервала коррекции погрешностей спутникового приемника, а корректировку исходных данных инерциальной навигационной системы осуществляют суммированием сглаженных сигналов разностей навигационных параметров с соответствующими сигналами интегральной навигационной системы.
| US 5657025 А, 12.08.1997 | |||
| US 6408245 B1, 18.06.2002 | |||
| US 20020177950 A1, 28.11.2002 | |||
| Способ упрочняющей обработки деталей | 1988 |
|
SU1595927A1 |
| СОЛОВЬЕВ Ю.А | |||
| Системы спутниковой навигации | |||
| - М.: КТЦ-"Эко-Трендз", 2000, 368 с | |||
| ГЛОНАСС | |||
| Принципы построения и функционирования | |||
| (БАКИТЬКО Р.В | |||
| и др.)/Под ред | |||
| А.И.ПЕРОВА, В.Н.ХАРИСОВА | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| - М.: Радиотехника, 2005, 688 с. | |||

