ОБЛАСТЬ ТЕХНИКИ
Предлагаемое изобретение относится к судовым навигационным системам, в частности к способу и системе для выработки параметров угловой ориентации корпуса судна. Предложенные способ и система применимы, в частности, при определении угловой ориентации суден на воздушной подушке.
УРОВЕНЬ ТЕХНИКИ
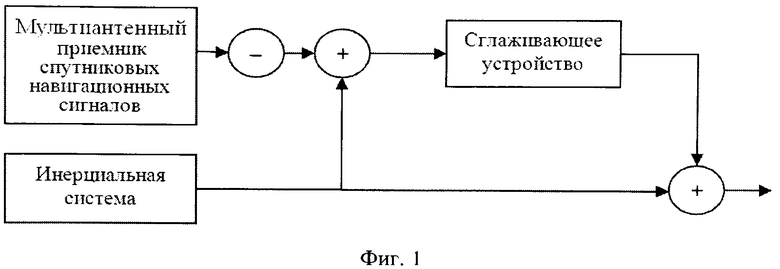
Современные навигационные системы обладают большим разнообразием и получили новый виток развития с выходом на широкий рынок спутниковой навигации. Сейчас спутниковые навигационные сигналы используются в самых различных сферах и зачастую применяются в сопряжении с автономными инерциальными навигационными системами. Типичным примером такого способа и системы является наиболее близкий аналог предлагаемого изобретения - способ для формирования навигационных данных объекта согласно патенту RU 2427800. Согласно предложенному в уровне техники способу, выходная информация об угловой ориентации судна вырабатывается путем суммирования разности одноименных навигационных параметров инерциальной системы 2, выполненной с возможностью выработки параметров угловой ориентации корпуса объекта и спутниковой навигационной системы 1, подвергшейся сглаживанию в сглаживающем устройстве 3, с выходными показаниями инерциальной навигационной системы (ИНС) 1. Согласно описанию RU 2427800, устройство для определения угловой ориентации корпуса судна содержит приемник (1) спутниковых навигационных сигналов; инвертер (-), соединенный с указанным приемником (1) и выполненный с возможностью инвертировать сигналы приемника; инерциальную систему (2), выполненную с возможностью выработки параметров угловой ориентации корпуса судна; первый сумматор (+), соединенный с инвертером (-) и инерциальной системой (2) и выполненный с возможностью суммировать сигналы инвертера (-) и инерциальной системы (2); сглаживающее устройство (3), соединенное с первым сумматором (+) и выполненное с возможностью сглаживать высокочастотную составляющую сигнала сумматора; второй сумматор, соединенный с инерциальной системой (2) и сглаживающим устройством (3) и выполненный с возможностью суммировать сигналы инерциальной системы (2) и сглаживающего устройства (3).
Тем не менее применение такого способа или устройства на практике имеет некоторые недостатки. При качке и заносах при маневрировании в инерциальной системе известного устройства возникают возмущения, обусловленные несовершенством примененных элементов и воздействием на них линейных ускорений. Эти возмущения возникают при ускорениях в месте установки инерциальной системы на судне и могут иметь более высокочастотный спектр по отношению к параметрам фильтра нижних частот, который используется в известном устройстве в качестве сглаживающего устройства, и таким образом указанные погрешности проходят в выходную информацию. Эта проблема имеет особую роль на легких судах на воздушной подушке, которые имеют малое водоизмещение, вследствие чего подвержены качке и заносам.
К недостаткам известного способа и устройства также можно отнести временную задержку в выработке параметров угловой ориентации объекта. В известной системе происходит процедура усреднения результатов измерений в ИНС, вследствие чего выходная информация вырабатывается с временной задержкой. Эта задержка суммируется со временем запаздывания информации, проходящей через фильтр нижних частот (сглаживающее устройство 3). В результате указанной процедуры обработки информации достигается компенсация медленно изменяющихся во времени погрешностей ИНС, но наличие запаздывания ограничивает возможную частоту выработки параметров угловой ориентации объекта. Информация об угловой ориентации объекта используется в системах автоматического удержания судна в процессе его движения в необходимой ориентации относительно горизонта и направления географического меридиана. Выполнение требования по быстродействию средств выработки угловой ориентации обеспечивает повышение быстродействия и точности работы системы автоматического регулирования - автопилота судна. Кроме того, быстродействие выработки информации расширяет возможности судна по обходу препятствий на пути его следования и удержании его в необходимой ориентации относительно горизонта при порывах ветра. Отсутствие запаздывания в определении угловой ориентации судна важно также для угловой стабилизации оптических пеленгаторов, антенн РЛС и вооружения при их установке на судне.
Таким образом, в области техники существует необходимость в обеспечении способа и устройства, способных предоставлять информацию об угловой ориентации судна с более высокой частотой и меньшими погрешностями при линейных ускорениях.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
В одном аспекте предлагаемое изобретение относится к системе для определения угловой ориентации корпуса судна. Предлагаемая система содержит приемник спутниковых навигационных сигналов; инерциальную систему; инвертер; сумматор и, кроме того, содержит интегрирующее устройство и масштабирующее устройство; причем инерциальная система выполнена в виде системы гироскопических датчиков угловых скоростей с возможностью выработки параметров угловых скоростей корпуса судна, выход инерциальной системы соединен со входом сумматора; выход приемника спутниковых навигационных сигналов соединен со входом сумматора; сумматор выполнен с возможностью суммировать поступающие на его вход сигналы, выход сумматора соединен со входом интегрирующего устройства; интегрирующее устройство выполнено с возможностью интегрировать сигналы сумматора и вырабатывать выходной сигнал, содержащий информацию о параметрах угловой ориентации корпуса судна, выход интегрирующего устройства соединен со входом масштабирующего устройства; масштабирующее устройство выполнено с возможностью преобразовывать поступающие на его вход сигналы, причем коэффициент преобразования равен коэффициенту преобразования сигналов приемника спутниковых навигационных сигналов, деленному на произведение коэффициента преобразования сигналов гироскопических датчиков угловых скоростей и коэффициента преобразования сигналов интегрирующего устройства, выход масштабирующего устройства соединен со входом инвертера; инвертер выполнен с возможностью инвертировать сигналы масштабирующего устройства, выход инвертера соединен со входом указанного сумматора.
Согласно другому аспекту предлагаемого изобретения, оно относится также к способу определения угловой ориентации корпуса судна, согласно которому текущие параметры угловой ориентации корпуса судна вычисляют с использованием интегрирования интегрирующим устройством суммы сигналов приемника спутниковых навигационных сигналов, сигналов гироскопических датчиков угловых скоростей и инвертированных масштабированных сигналов, соответствующих параметрам угловой ориентации корпуса судна в предшествующий момент времени, причем коэффициент преобразования сигналов, соответствующих параметрам угловой ориентации корпуса судна в предшествующий момент времени, при масштабировании равен коэффициенту преобразования сигналов приемника спутниковых навигационных сигналов, деленному на произведение коэффициента преобразования сигналов гироскопических датчиков угловых скоростей и коэффициента преобразования сигналов интегрирующего устройства.
Техническим результатом предлагаемого изобретения является снижение погрешности определения угловой ориентации корпуса судна, а также повышение частоты выработки параметров угловой ориентации корпуса судна.
Указанный технический результат обеспечивается благодаря тому, что система согласно изобретению содержит интегрирующее устройство и масштабирующее устройство; причем инерциальная система выполнена в виде системы гироскопических датчиков угловых скоростей с возможностью выработки параметров угловых скоростей корпуса судна, выход инерциальной системы соединен со входом сумматора; выход приемника спутниковых навигационных сигналов соединен со входом сумматора; сумматор выполнен с возможностью суммировать поступающие на его вход сигналы, выход сумматора соединен со входом интегрирующего устройства; интегрирующее устройство выполнено с возможностью интегрировать сигналы сумматора и вырабатывать выходной сигнал, содержащий информацию о параметрах угловой ориентации корпуса судна, выход интегрирующего устройства соединен со входом масштабирующего устройства; масштабирующее устройство выполнено с возможностью преобразовывать поступающие на его вход сигналы, причем коэффициент преобразования равен коэффициенту преобразования сигналов приемника спутниковых навигационных сигналов, деленному на произведение коэффициента преобразования сигналов гироскопических датчиков угловых скоростей и коэффициента преобразования сигналов интегрирующего устройства, выход масштабирующего устройства соединен со входом инвертера; инвертер выполнен с возможностью инвертировать сигналы масштабирующего устройства, выход инвертера соединен со входом указанного сумматора.
При осуществлении способа согласно предлагаемому изобретению технический результат обеспечивается благодаря тому, что текущие параметры угловой ориентации корпуса судна вычисляют с использованием интегрирования интегрирующим устройством суммы сигналов приемника спутниковых навигационных сигналов, сигналов гироскопических датчиков угловых скоростей и инвертированных масштабированных сигналов, соответствующих параметрам угловой ориентации корпуса судна в предшествующий момент времени, причем коэффициент преобразования сигналов, соответствующих параметрам угловой ориентации корпуса судна в предшествующий момент времени, при масштабировании равен коэффициенту преобразования сигналов приемника спутниковых навигационных сигналов, деленному на произведение коэффициента преобразования сигналов гироскопических датчиков угловых скоростей и коэффициента преобразования сигналов интегрирующего устройства.
Сущность и преимущества предлагаемого изобретения будут более подробно объяснены далее со ссылками на прилагаемые чертежи.
Необходимо отметить, что так как изобретение имеет единый замысел, то все пояснения в работе системы могут быть также перенесены на функционирование предлагаемого способа.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На Фиг. 1 показана функциональная схема способа и системы, известных из уровня техники.
На Фиг. 2 показана функциональная схема предлагаемых способа и системы.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
В известном из уровня техники способе и системе RU 2427800 под термином «интеграция» понимается совместная обработка информации, вырабатываемой двумя источниками - приемником спутниковых навигационных сигналов и инерциальной системой. Функциональная схема известных способа и системы для определения угловой ориентации объекта показана на Фиг. 1.
Разность одноименных от элементов 1 и 2 сглаживается в устройстве 3 и добавляется к выходным показаниям системы 2. Сглаживающее устройство 3 является фильтром нижних частот. В системе 1 предусмотрена процедура усреднения результатов измерений, вследствие чего выходная информация вырабатывается с временной задержкой. Эта задержка суммируется со временем запаздывания информации, проходящей через фильтр нижних частот. В результате указанной процедуры обработки информации достигается компенсация медленно изменяющихся во времени погрешностей инерциальной системы 2.
Предлагаемая система направлена на устранение недостатков имеющегося уровня техники. Структурная схема системы, предлагаемой согласно настоящему изобретению, показана на Фиг. 2.
Инерциальные навигационные системы в основном предназначены для определения положения объекта в инерциальном пространстве посредством определения навигационных параметров - координат объекта и направления его движения. ИНС является достаточно сложной системой, содержащей акселерометры и гироскопы, базирующиеся на использовании сил инерции при поступательном и вращательных движениях, а также вычислительное устройство - таким образом, инерциальные навигационные системы зачастую имеют довольно сложное строение, и связанные с этим сложные математические модели. Информацию об угловой ориентации объекта необходимо вырабатывать чаще и с меньшим запаздыванием, чем это допустимо для навигационной информации, предоставляемой такими сложными системами. В предлагаемом устройстве вместо информации инерциальной системы, содержащей гироскопы и акселерометры и принципиально возмущаемой при маневрировании и качках объекта, используется информация гироскопических датчиков угловых скоростей поворота судна вокруг ортогональных осей. Показания гироскопических датчиков угловых скоростей не зависят от линейных ускорений объекта, возникающих при его маневрировании.
Также отличительным преимуществом заявленных способа и системы от известных из уровня техники является возможность выдавать потребителям информацию об угловой ориентации объекта чаще. Эта особенность предлагаемого устройства обусловлена тем, что известные гироскопические датчики угловых скоростей имеют меньшее запаздывание в процессе измерения этого параметра и большую частоту выдачи информации по сравнению с инерциальными и спутниковыми навигационными системами.
Ввиду того, что для однозначного определения ориентации объекта в пространстве необходимо определять 3 параметра (например, углы крена, дифферента и курса), то в предпочтительном варианте реализации способа и устройства предусмотрено наличие трех измерительных каналов. На Фиг. 2 изображена схема одного из измерительных каналов, не показанные на схеме измерительные каналы организованы аналогично. Согласно предпочтительному варианту реализации предлагаемой системы, она содержит приемник спутниковых навигационных сигналов; инерциальную систему; инвертер; сумматор; интегрирующее устройство и масштабирующее устройство (см. Фиг. 2). Выход приемника спутниковых навигационных сигналов соединен со входом сумматора. Сумматор выполнен с возможностью суммировать поступающие на его вход сигналы, выход сумматора соединен со входом интегрирующего устройства. Интегрирующее устройство выполнено с возможностью интегрировать сигналы сумматора и вырабатывать выходной сигнал, содержащий информацию о параметрах угловой ориентации корпуса судна, выход интегрирующего устройства соединен со входом масштабирующего устройства. Масштабирующее устройство выполнено с возможностью преобразовывать поступающие на его вход сигналы, причем коэффициент преобразования равен коэффициенту преобразования сигналов приемника спутниковых навигационных сигналов, деленному на произведение коэффициента преобразования сигналов гироскопических датчиков угловых скоростей и коэффициента преобразования сигналов интегрирующего устройства, выход масштабирующего устройства соединен со входом инвертера. Инвертер выполнен с возможностью инвертировать сигналы масштабирующего устройства, выход инвертера соединен со входом указанного сумматора. Важной особенностью предлагаемой системы является то, что инерциальная система выполнена в виде системы гироскопических датчиков угловых скоростей с возможностью выработки параметров угловых скоростей корпуса судна. Таким образом, информация об угловой ориентации судна, вырабатываемая на выходе датчиков угловых скоростей - градусы в секунду, а размерность выходных сигналов приемника спутниковых навигационных сигналов - градусы. Значение коэффициента преобразования масштабирующего устройства системы выбирается таким образом, чтобы произведение коэффициентов преобразований измерителя угловой скорости, интегрирующего устройства и масштабирующего устройства было равно коэффициенту преобразования спутникового приемника. При этом интегрированные показания измерителя угловой скорости с учетом масштабирования оказываются равны коэффициенту преобразования спутникового приемника. Необходимое для этого значение масштабирующего множителя устанавливается однократно при создании системы. Отличие значения масштабирующего множителя от необходимой величины приводит к ошибкам (по масштабу) в определении углов ориентации судна. Таким образом, значение масштабирующего коэффициента равно коэффициенту преобразования спутникового приемника, деленному на произведение коэффициентов преобразования измерителя угловой скорости и интегрирующего устройства.
Предлагаемая система работает следующим образом. Выходные сигналы приемника спутниковых навигационных сигналов (градусы) суммируются с выходными сигналами датчиков угловых скоростей (градусы в секунду), затем поступают на сумматор, где они суммируются с сигналами, содержащими информацию об угловой ориентации в предыдущий момент времени (градусы). Ввиду того, что для однозначного определения положения объекта в инерциальном пространстве требуется три параметра (углы курса, крена и дифферента), то в предпочтительном варианте реализации предлагаемой системы имеется три измерительных канала. Но в других вариантах реализации система также может иметь два или один измерительный канал. После суммирования на выходе сумматора образуется сигнал, представляющий собой функцию времени первого порядка. Этот сигнал подается на вход интегрирующего устройства, где происходит его интегрирование. Сигнал на выходе интегрирующего устройства несет информацию о текущих параметрах угловой ориентации судна (углах курса, крена и дифферента, размерность градусы). Необходимо отметить, что постоянное обновление информации обеспечено через цепь обратной связи: сигнал с выхода интегрирующего устройства подается на масштабирующее устройство, где он умножается на коэффициент, равный коэффициенту преобразования сигналов приемника спутниковых навигационных сигналов, деленному на произведение коэффициента преобразования сигналов гироскопических датчиков угловых скоростей и коэффициента преобразования сигналов интегрирующего устройства, затем подается на инвертер, а с выхода инвертора инвертированный масштабированный сигнал подается на вход сумматора. Иными словами, из абсолютных параметром угловой ориентации, поступающих от приемника спутниковых навигационных сигналов, вычитаются параметры угловой ориентации в предыдущий момент времени, имеющие ту же размерность, и складываются с параметрами угловых скоростей, имеющими зависимость от времени. В результате на выходе интегрирующего устройства вырабатывается сигнал, несущий информацию о текущих параметрах угловой ориентации корпуса судна.
В настоящее время известно большое количество типов гироскопов-гиротахометров. Находящиеся в свободной продаже недорогие миниатюрные микромеханические гироскопы, измеряющие угловые скорости поворота, легко и недорого использовать в предлагаемой системе (а также в предлагаемом способе), в частности, для измерения угловой ориентации судна на воздушной подушке.
Согласно еще одному аспекту, предлагаемое изобретение относится к способу выработки параметров угловой ориентации корпуса судна. Согласно предлагаемому способу текущие параметры угловой ориентации корпуса судна вычисляют с использованием интегрирования интегрирующим устройством суммы сигналов приемника спутниковых навигационных сигналов, сигналов гироскопических датчиков угловых скоростей и инвертированных масштабированных сигналов, соответствующих параметрам угловой ориентации корпуса судна в предшествующий момент времени, причем коэффициент преобразования сигналов, соответствующих параметрам угловой ориентации корпуса судна в предшествующий момент времени, при масштабировании равен коэффициенту преобразования сигналов приемника спутниковых навигационных сигналов, деленному на произведение коэффициента преобразования сигналов гироскопических датчиков угловых скоростей и коэффициента преобразования сигналов интегрирующего устройства. Таким образом, в сравнении с математической моделью способа, известного из уровня техники, в предлагаемом согласно настоящему изобретению способе используется упрощенная математическая процедура определения угловой ориентации корпуса судна.
Функциональная схема предлагаемого способа аналогична структурной схеме предлагаемой системы и изображена на Фиг. 2. Вычисленное значение угловой ориентации корпуса судна вокруг какой-либо оси по заявленному способу в соответствии с Фиг. 2 вырабатывается путем интегрирования суммы трех величин:
- сигнала соответствующего датчика угловой скорости поворота корпуса судна,
- сигнала мультиантенного спутникового приемника об угловой ориентации корпуса судна,
- масштабированного значения вычисленного в предыдущий момент времени значения угловой ориентации корпуса судна, взятого с обратным знаком.
Таким образом, в заявленном способе используется совместная обработка информации мультиантенного спутникового приемника с гироскопическими датчиками угловых скоростей.
При маневрировании и качках судна в инерциальной навигационной системе возникают возмущения, обусловленные несовершенством примененных элементов. Эти возмущения возникают при ускорениях в месте установки инерциальной навигационной системы на судне и могут иметь более высокочастотный спектр по отношению к параметрам используемого фильтра и поэтому проходят в выходную информацию известного в уровне техники способа. В отличие от известного из уровня техники способа, в способе согласно настоящему изобретению предлагается использовать вместо сигналов инерциальной навигационной системы сигналы датчиков угловых скоростей. В результате параметры угловой ориентации корпуса судна определяется в широком диапазоне частот без искажений, что является важной отличительной особенностью предлагаемого способа от известного из уровня техники. Также отличительным преимуществом заявленного способа от известного из уровня техники является возможность выдавать потребителям информацию об угловой ориентации объекта чаще. Указанное преимущество предлагаемого способа обусловлено тем, что известные гироскопические датчики угловых скоростей имеют меньшее запаздывание в процессе измерения этого параметра и большую частоту выдачи информации по сравнению с инерциальными и спутниковыми навигационными системами.
Как понятно специалисту в области техники, для осуществления предлагаемого способа подходит описанная выше система выработки параметров угловой ориентации корпуса судна, также относящаяся к предлагаемому изобретению. Здесь необходимо отметить, что предлагаемый согласно изобретению способ описан в общем виде для типа обрабатываемых сигналов, в то время как на практике указанные сигналы как правило поступают по нескольким каналам, определенным для каждой из осей навигационной системы координат. Для однозначного определения параметром угловой ориентации корпуса судна требуется информация по трем осям ортогональной навигационной системы координат, и согласно предпочтительному варианту реализации указанный способ выработки параметров угловой ориентации работает в трех каналах. Но специалисту в области техники понятно, что предлагаемое изобретение не ограничивается предпочтительным вариантом, и достижение указанного технического результата возможно также и при работе в одном информационном канале.
Заявитель прилагает формулу предлагаемого изобретения, где отражены существенные признаки изобретения. Специалисту в области техники понятно, что предлагаемое изобретение не ограничивается настоящим описанием и может быть осуществлено в различных вариантах, в объеме формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ высокоточного определения навигационных элементов движения судна | 2016 |
|
RU2643072C2 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС ДЛЯ НАВИГАЦИИ И УПРАВЛЕНИЯ МОРСКИХ СУДОВ | 1997 |
|
RU2117253C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ УСТРОЙСТВ КОРАБЛЯ С УЧЕТОМ ДЕФОРМАЦИЙ ЕГО КОРПУСА | 2015 |
|
RU2599285C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2395061C1 |
| ИНЕРЦИАЛЬНО-СПУТНИКОВЫЙ МОДУЛЬ И КОМПЛЕКСНАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА НАВИГАЦИИ, СВЯЗИ, ОСВЕЩЕНИЯ ОБСТАНОВКИ, УПРАВЛЕНИЯ И КОНТРОЛЯ | 1992 |
|
RU2036432C1 |
| ГИРОАЗИМУТКОМПАС С АВТОМАТИЧЕСКОЙ ВЫРАБОТКОЙ НАВИГАЦИОННОЙ ИНФОРМАЦИИ | 2011 |
|
RU2470260C1 |
| ГИРОГОРИЗОНТКОМПАС С ВРАЩЕНИЕМ ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО БЛОКА | 2010 |
|
RU2436046C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2443978C1 |
| СПОСОБ СПУТНИКОВОЙ КОРРЕКЦИИ АВТОНОМНЫХ СРЕДСТВ НАВИГАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2012 |
|
RU2506542C1 |
| ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА НАВИГАЦИИ, ОРИЕНТАЦИИ И СТАБИЛИЗАЦИИ | 2008 |
|
RU2375679C2 |
Изобретение относится к измерительной технике и может найти применение в судовых навигационных системах для выработки параметров угловой ориентации корпуса судна. Технический результат - повышение точности. Для этого выход приемника спутниковых навигационных сигналов соединен со входом сумматора; выход сумматора соединен со входом интегрирующего устройства; интегрирующее устройство выполнено с возможностью интегрировать сигналы сумматора и вырабатывать выходной сигнал, содержащий информацию о параметрах угловой ориентации корпуса судна. Масштабирующее устройство выполнено с возможностью преобразовывать поступающие на его вход сигналы, причем коэффициент преобразования равен коэффициенту преобразования сигналов приемника спутниковых навигационных сигналов, деленному на произведение коэффициента преобразования сигналов гироскопических датчиков угловых скоростей и коэффициента преобразования сигналов интегрирующего устройства, выход масштабирующего устройства соединен со входом инвертора; инвертор выполнен с возможностью инвертировать сигналы масштабирующего устройства, выход инвертора соединен со входом сумматора. 2 н. и 3 з.п. ф-лы, 2 ил.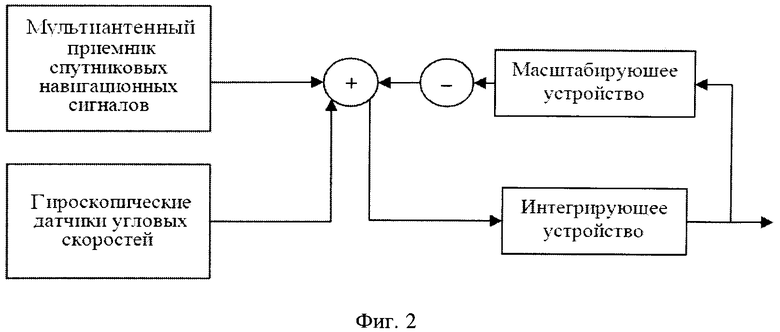
1. Система для выработки параметров угловой ориентации корпуса судна, содержащая приемник спутниковых навигационных сигналов, инерциальную систему, инвертор и сумматор, отличающаяся тем, что система дополнительно содержит интегрирующее устройство и масштабирующее устройство; причем
инерциальная система выполнена в виде системы гироскопических датчиков угловых скоростей с возможностью выработки параметров угловых скоростей корпуса судна, выход инерциальной системы соединен со входом сумматора;
выход приемника спутниковых навигационных сигналов соединен со входом сумматора;
сумматор выполнен с возможностью суммировать поступающие на его вход сигналы, выход сумматора соединен со входом интегрирующего устройства;
интегрирующее устройство выполнено с возможностью интегрировать сигналы сумматора и вырабатывать выходной сигнал, содержащий информацию о параметрах угловой ориентации корпуса судна, выход интегрирующего устройства соединен со входом масштабирующего устройства;
масштабирующее устройство выполнено с возможностью преобразовывать поступающие на его вход сигналы, причем коэффициент преобразования равен коэффициенту преобразования сигналов приемника спутниковых навигационных сигналов, деленному на произведение коэффициента преобразования сигналов гироскопических датчиков угловых скоростей и коэффициента преобразования сигналов интегрирующего устройства, выход масштабирующего устройства соединен со входом инвертора;
инвертор выполнен с возможностью инвертировать сигналы масштабирующего устройства, выход инвертора соединен со входом указанного сумматора.
2. Система по п. 1, которая предназначена для определения угловой ориентации корпуса судна на воздушной подушке.
3. Система по п. 1 или 2, отличающася тем, что приемник спутниковых навигационных сигналов имеет по меньшей мере две антенны, а инерциальная система выполнена в виде системы из по меньшей мере двух гироскопических датчиков угловых скоростей.
4. Способ выработки параметров угловой ориентации корпуса судна, согласно которому
текущие параметры угловой ориентации корпуса судна вычисляют с использованием интегрирования интегрирующим устройством суммы сигналов приемника спутниковых навигационных сигналов, сигналов гироскопических датчиков угловых скоростей и инвертированных масштабированных сигналов, соответствующих параметрам угловой ориентации корпуса судна в предшествующий момент времени,
причем коэффициент преобразования сигналов, соответствующих параметрам угловой ориентации корпуса судна в предшествующий момент времени, при масштабировании равен коэффициенту преобразования сигналов приемника спутниковых навигационных сигналов, деленному на произведение коэффициента преобразования сигналов гироскопических датчиков угловых скоростей и коэффициента преобразования сигналов интегрирующего устройства.
5. Способ по п. 4, который предназначен для определения угловой ориентации корпуса судна на воздушной подушке.
| СПОСОБ ФОРМИРОВАНИЯ НАВИГАЦИОННЫХ ДАННЫХ ОБЪЕКТА | 2010 |
|
RU2427800C1 |
| US 5657025 A, 12.08.1997 | |||
| US 6408245 B1, 18.06.2002 | |||
| US 20020177950 А1, 28.11.2002 | |||
| Способ упрочняющей обработки деталей | 1988 |
|
SU1595927A1 |

