Данное изобретение относится к области измерительной техники и приборостроения и может найти применение в метрологии, в измерительных системах и системах управления различными объектами.
Широко известен способ измерения угла поворота с помощью радиального растра и одной считывающей головки, выходные сигналы которой передают в блок обработки, в котором накапливают интегральную сумму, пропорциональную углу поворота (см., например, «Фотоэлектрические преобразователи информации». М.: «Машиностроение», 1974, под редакцией д.т.н., проф. Л.Н. Преснухина). При этом считывающая головка регистрирует модуляцию светового потока, осуществляемую с помощью сопряжения двух растров: радиального и индикаторного (см., например, «Оптоэлектронные преобразователи угловых перемещений» [Электронный ресурс] / Специальное конструкторское бюро измерительных систем (СКБ ИС). Электрон, дан., СПб.: СКБ ИС, 2007. Режим доступа http://www.skbis.ru/rotary.php?id=2 свободный), либо использования явления дифракции излучения на периодических структурах (см., например, A.Teimel "Technology and applications of grating interferometers in high-precision measurement", Precision Engineering, 1992, vol.14, No3, p.147-154). Известен также и основной недостаток данного способа измерения угла поворота, состоящий в том, что результат измерения искажается рядом факторов, среди которых основными являются: погрешность от несоосности (эксцентриситета) установки радиального растра на вал, угол поворота которого необходимо измерить; погрешность от неточности изготовления радиального растра и погрешность, вызванная биениями подшипников, в которых установлен вал, угол поворота которого необходимо измерить.
Известны также и основные приемы, с помощью которых повышают точность измерений угла поворота вала. Основным способом снижения погрешности преобразования угла поворота является применение принципа путевого усреднения или, как его еще называют, принципа многоголовочного считывания (см., например, В.Ф. Ионак «Приборы кинематического контроля». М.: «Машиностроение», 1981, 129 с.). Снижение погрешности измерения на основе принципа путевого усреднения основано на использовании нескольких дополнительных считывающих головок, однотипных с основной головкой и расположенных по кругу с равным шагом, выходные сигналы которых суммируют с выходным сигналом основной головки. Так, если используют только одну дополнительную считывающую головку, расположенную диаметрально противоположно относительно основной, то в результате сложения их выходных сигналов в суммарном сигнале получают подавление всех нечетных гармоник погрешности, вызванной эксцентриситетом установки растра на валу, угол поворота которого необходимо измерить, биениями подшипников вала, и неточностью изготовления самого растра. Если используют еще две дополнительные головки, которые устанавливают равномерно по кругу с шагом в 90°, то при сложении их выходных сигналов с сигналами первых двух головок, в суммарном сигнале получают подавление части четных гармоник, номера которых образованы умножением числа 2 на нечетные числа: 1, 3, 5 и т.д. (Т.е. гармоники с номерами: 2, 6, 10 и т.д.). В результате в выходном сигнале преобразователя сохраняется дестабилизирующее действие только ограниченного числа четных гармоник: 4, 8, 12, 16 и т.д. В связи с этим происходит значительное повышение точности преобразования угла поворота.
Однако применение принципа путевого усреднения имеет достаточно ограниченную сферу применения. Рассмотрим данный тезис на примере использования принципа путевого усреднения в преобразователе с идеальным растром, но установленным неточно относительно оси вала. Предполагаем, что в преобразователе установлена только одна дополнительная считывающая головка, расположенная диаметрально противоположно основной. В свою очередь, каждая считывающая головка преобразователя имеет по четыре фотоприемника, благодаря попарному соединению которых реализуется подавление синфазной составляющей сигналов фотоприемников. В результате выходные сигналы считывающих головок можно представить следующими выражениями:




где  и
и  - квадратурные сигналы первой (основной) головки,
- квадратурные сигналы первой (основной) головки,  и
и  - квадратурные сигналы второй (дополнительной) головки, θ - измеряемый угол поворота, δ - искажения фазы сигналов, вносимые эксцентриситетом установки растра.
- квадратурные сигналы второй (дополнительной) головки, θ - измеряемый угол поворота, δ - искажения фазы сигналов, вносимые эксцентриситетом установки растра.
После сложения одноименных квадратурных сигналов двух головок формируются следующие сигналы:




В результате реализации процедуры сложения одноименных квадратурных сигналов формируют два новых квадратурных сигнала, фаза которых не искажена эксцентриситетом установки растра на оси, но амплитуда промодулирована по закону cos δ. При этом аргумент функции модуляции амплитуды δ связан с величиной имеющегося эксцентриситета е соотношением:

где d - период радиального растра, φ0 - угловая координата центра симметрии радиального растра в полярной системе координат, привязанной к оси вала преобразователя. Следовательно, в пределах одного оборота вала с растром амплитуда суммарных квадратур, представленных выражениями (2), меняется в соответствии с (3), причем глубина модуляции пропорциональна величине отношения эксцентриситета е к периоду d. Например, при е=d имеет место 100% модуляция амплитуды квадратур, при которой нарушается ход преобразования угла поворота в код. На самом деле нарушения функционирования преобразователя возникают при существенно меньшей величине модуляции. Производители прецизионных угловых преобразователей не допускают модуляции амплитуды суммарных квадратур более 10% от максимума. Этому соответствует допустимое значение эксцентриситета (как от неточной вклейки растра, так и от биения подшипников вала преобразователя) не более 0,1 периода растра.
Поскольку снижение погрешности преобразования угла поворота при использовании принципа путевого усреднения возможно только при условии изготовления с высокой точностью механических узлов, достаточно точного базирования растра на валу и использования весьма точных подшипников. Это обстоятельство сказывается на себестоимости производства высокоточных угловых преобразователей.
Чтобы снизить себестоимость преобразователей угла поворота в оптической схеме преобразователя используют только одну считывающую головку, а для уменьшения сопутствующей погрешности преобразования применяют принцип коррекции погрешности преобразования путем снятия кривой погрешности собранного преобразователя и вычитания ее из текущих измерений. Для этого (см. Патент US №6304825 с приоритетом от Oct. 16, 2001 г."Rotary encoder error compensation system and method for photoreception surface motion sensing and control") в устройстве обработки данных преобразователя выделяют специальный блок памяти, в котором хранят файл данных о снятой кривой погрешности. Данные из этого блока считывают в соответствии с текущей угловой координатой вала.
Покажем, что использование принципа коррекции погрешности согласно изложенному алгоритму не позволяет полностью устранить случайные составляющие погрешности преобразования.
Пусть после сборки преобразователя на углоизмерительной установке снята кривая погрешности преобразователя Δ(θ), как функция угла поворота θ

где δф - погрешность формирования растра (систематическая погрешность), δм - погрешность монтажа носителя (погрешность эксцентриситета, систематическая составляющая погрешности), δпi - i-ая случайная реализация погрешности, вносимой биениями подшипников преобразователя. Эта функция вносится в блок памяти устройства обработки преобразователя. При всех последующих применениях мгновенные значения этой функции, соответствующие измеренному углу поворота, вносятся в результат измерений с противоположным знаком, чтобы скомпенсировать имеющуюся погрешность. С большой долей вероятности можно утверждать, что составляющие δф и δм будут подавлены полностью, а вклад случайной составляющей δп - только частично. Дело в том, что текущий вклад биений подшипника в момент измерения угла поворота объекта с большой долей вероятности не соответствует тому значению, которое зафиксировано в блоке памяти устройства обработки, т.к. оно было измерено заранее, в момент определения погрешности преобразователя. В результате выполнения операции коррекции эти случайные реализации биений подшипника сложатся по закону случайных чисел и после усреднения на число выборок дадут следующий результат:

где δi+1 - случайная реализация вклада биений подшипников в моменты снятия показаний датчика, δп - результат совместного действия двух случайных выборок, который меньше исходной составляющей погрешности δi и составляет 0,707δ, где δ - среднеквадратичное значение биений подшипника. Это значение погрешности и есть наиболее вероятный предел улучшения результатов измерения при использования указанного способа. Дальнейшее уменьшение этой составляющей возможно за счет применения более точных, а следовательно, более дорогих подшипников, с отмеченными выше последствиями.
Таким образом, применение принципа коррекции погрешности согласно изложенному способу не позволяет полностью устранить случайные составляющие погрешности преобразования и для существенного повышения точности измерений требует использования более дорогих подшипников.
Покажем также, что способ повышения точности измерения углов, основанный на совместном использовании двух рассмотренных выше принципов коррекции результатов измерений (применение дополнительных головок считывания и метода компенсации с помощью предварительно снятой кривой погрешности преобразования) также не позволяет кардинально снизить погрешность преобразования. Данный способ реализован немецкой фирмой Heidenhain в преобразователе RON 905 (см., например, "Angular encoders: General Catalog/ Heidenhain GmbH. Traunreut, Germany: Heidenhain GmdH, 2000. p.82) и является ближайшим аналогом (прототипом) для предлагаемого в настоящей заявке изобретения. В этом преобразователе используют четыре считывающих головки, благодаря чему погрешность преобразования снижают до 0,4". Затем снимают кривую погрешности созданного преобразователя, которую в необходимой форме вносят в специальный блок памяти и используют для коррекции результатов измерения. Применение данного способа повышения точности измерений угла поворота позволило изготовителям снизить результирующую погрешность в два раза и довести ее до 0,2". Кроме того, неизбежный в процессе эксплуатации преобразователя износ подшипников приведет к ухудшению точности преобразования и требует периодических калибровок преобразователя и перезаписи файла коррекции в блоке памяти преобразователя. Это также увеличивает эксплуатационные расходы.
Техническим результатом настоящего изобретения является радикальное уменьшение погрешности преобразования при одновременном снижении и сложности, и стоимости изделия, и эксплуатационных расходов.
Это достигается за счет того, что для реализации процесса измерения угла поворота используют только одну считывающую головку, сопряженную с радиальным растром. Файл данных о погрешности используемого растра получают заранее на специальной углоизмерительной установке. Обращаем внимание - растра, а не преобразователя в сборе. Это принципиально важно! Полученный файл данных о погрешности растра вводят в блок памяти устройства обработки данных преобразователя. Пространственную нестабильность положения растра при его вращении, обусловленную неточностью соединения его с валом и неизбежными биениями подшипников, измеряют одновременно с измерением угла поворота с помощью дополнительной измерительной головки. Функционально данная головка должна регистрировать не угол поворота вала, а линейные смещения растра в тангенциальном направлении (относительно используемой считывающей головки). Для этого целесообразно регистрировать пространственные смещения оси вала, на котором закреплен данный радиальный растр. В этом заключается второе принципиальное отличие данного изобретения от прототипа, в котором дополнительные считывающие головки - принципиально однотипные и регистрируют угловые смещения вала (растра).
На чертеже приведен пример технической реализации предлагаемого способа. Устройство, реализующее заявляемое изобретение, содержит радиальный растр 1, считывающую головку 2, юстировочную окружность 3, нанесенную на общий с растром носитель, измерительную головку 4, блок 5 оцифровки и масштабирования выходного сигнала, блок 6 формирования текущей угловой координаты, блок памяти 7, блок 8 коррекции результата измерения.
Линейные смещения радиального растра 1 в тангенциальном направлении контролируют с помощью широко используемой на практике юстировочной окружности 3, наносимой на стеклянную заготовку в одном технологическом процессе строго соосно с радиальным растром. Для того чтобы с помощью юстировочной окружности 3 можно было судить о линейных смещения радиального растра 1, применяют дополнительную измерительную головку 4, установленную в позиции, которая смещена по кругу на угол 90° относительно позиции считывающей головки 2. Измерительная головка 4 может быть сформирована на основе позиционно-чувствительного элемента, например трехщелевого приемника. В этом узле каждая щель приемника смещена в пространстве относительно соседней примерно на половину ширины щели. С каждой щелью сопряжен отдельный фотоприемник. Выходные сигналы фотоприемников складываются между собой с помощью операционного усилителя в соответствии с формулой
 ,
,
где UA, UB и UC - выходные сигналы фотоприемников А, В и С соответственно. Когда граница юстировочной окружности 3 находится точно посередине окна В суммарный сигнал  равен нулю. Смещение границы вверх относительно середины окна даст рассогласование со знаком «+», а смещение вниз - рассогласование со знаком «-», которые соответствуют знаку и величине смещения радиального растра 1 относительно оси вращения.
равен нулю. Смещение границы вверх относительно середины окна даст рассогласование со знаком «+», а смещение вниз - рассогласование со знаком «-», которые соответствуют знаку и величине смещения радиального растра 1 относительно оси вращения.
Можно сделать оценку требуемой чувствительности измерительной головки для эффективной компенсации биений растра и подшипников. Для оценок используем размеры преобразователя, характерные для использованного прототипа. Для преобразователя RON 905 диаметр растра равен приблизительно 160 мм. Для того чтобы погрешность преобразователя таких габаритов не превышала 0,1", неопределенность пространственного положения оси вращения растра не должна превышать 0,4 мкм. Известно, что трехщелевой фотоприемник имеет чувствительность к смещению края линии (и, соответственно, юстировочной окружности) не хуже 6 нм. Данная чувствительность измерительной головки позволит проводить коррекцию биений вала и растра с погрешностью не хуже 0,015".
Важным условием нормальной работы устройства, реализующего данный способ в соответствии с чертежом, является требование, чтобы ширина щелей приемника измерительной головки 2 была больше возможного диапазона биения юстировочной окружности 3, обусловленного неточностью вклейки растра и биениями оси вращения вала в подшипниках (в том числе и с учетом его увеличения в процессе эксплуатации). Если ширину щелей упомянутого приемника выбрать в пределах 5-10 мкм, то необходимое условие работоспособности устройства выполняется для всех реальных условий производства и эксплуатации преобразователей, изготовленных по данному изобретению.
В блоке 5 происходит оцифровка и масштабирование выходного сигнала  и передача его в блок 8 для коррекции данных с измерительной головки 2, сопряженной с угловым растром 1. Текущая угловая координата с выхода блока 6 поступает в блок 8 для упомянутой коррекции и на вход блока памяти 7 для снятия текущих данных об угловой погрешности растра 1, которые также передаются в блок 8 для коррекции результата измерения.
и передача его в блок 8 для коррекции данных с измерительной головки 2, сопряженной с угловым растром 1. Текущая угловая координата с выхода блока 6 поступает в блок 8 для упомянутой коррекции и на вход блока памяти 7 для снятия текущих данных об угловой погрешности растра 1, которые также передаются в блок 8 для коррекции результата измерения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Эталон единицы плоского угла | 2016 |
|
RU2637727C1 |
| СПОСОБ КАЛИБРОВКИ УГЛОВОГО ДАТЧИКА | 2015 |
|
RU2592734C1 |
| Способ угловых измерений | 2021 |
|
RU2782353C1 |
| Способ повышения точности синтеза топологии элементов | 2017 |
|
RU2675077C1 |
| СПОСОБ ИЗМЕРЕНИЯ ТОЧНОСТИ ИЗГОТОВЛЕНИЯ УГЛОИЗМЕРИТЕЛЬНЫХ СТРУКТУР, НАНОСИМЫХ НА ПРОЗРАЧНЫЙ НОСИТЕЛЬ | 2003 |
|
RU2242715C1 |
| Способ построения углового преобразователя абсолютного типа | 2016 |
|
RU2634329C1 |
| ПОВОРОТНЫЙ УГЛОМЕРНЫЙ СТОЛ | 2015 |
|
RU2596693C1 |
| СПОСОБ РЕГИСТРАЦИИ ФАЗЫ КВАДРАТУРНЫХ СИГНАЛОВ | 2018 |
|
RU2692965C1 |
| Преобразователь угла поворота вала в код | 1976 |
|
SU746658A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОГРЕШНОСТИ ПРЕОБРАЗОВАТЕЛЯ ПОВОРОТА ВАЛА В КОД | 2014 |
|
RU2559174C1 |
Изобретение относится к области измерительной техники и приборостроения и может найти применение в метрологии, в измерительных системах и системах управления различными объектами. Угол поворота измеряется с помощью углового преобразователя, имеющего в своем составе радиальный растр и сопряженную с ним считывающую головку. Полученный результат измерения угла поворота корректируется с помощью файла данных об угловой погрешности растра, используемого в конкретном преобразователе, и результатов измерения текущих линейных смещений оси вращения растра в тангенциальном, относительно упомянутой считывающей головки, направлении, которые получают с помощью дополнительной измерительной головки. Изобретение позволяет радикально уменьшить погрешности преобразования при одновременном снижении сложности и стоимости изделия, а также эксплуатационных расходов. 1 ил.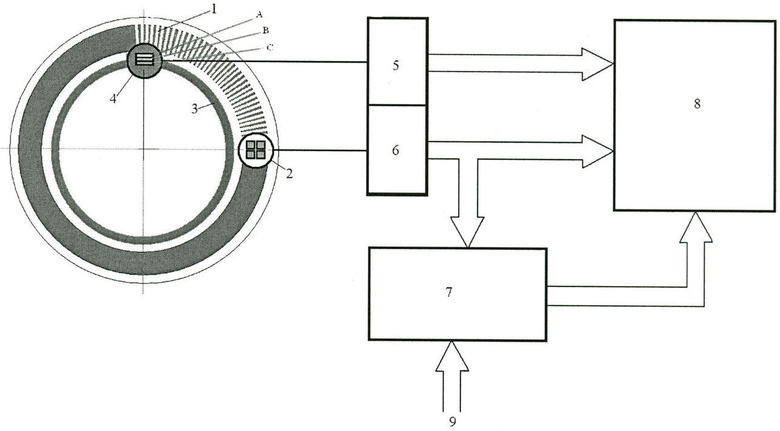
Способ повышения точности измерения угла поворота, состоящий в том, что для измерения используют угловой преобразователь, имеющий в своем составе радиальный растр и сопряженную с ним считывающую головку, отличающийся тем, что полученный результат измерения угла поворота корректируют с помощью файла данных об угловой погрешности растра, используемого в конкретном преобразователе, и результатов измерения текущих линейных смещений оси вращения растра в тангенциальном, относительно упомянутой считывающей головки, направлении, которые получают с помощью дополнительной измерительной головки.
| KIR'YANOV V.P | |||
| et al | |||
| Analysis of modem technologies for synthesizing goniometric structures for high-accuracy angle measurements (Analytical review), J | |||
| OPT | |||
| TECHNOL., v.74, №12, p.823-830 | |||
| Устройство для измерения угловой скорости объекта | 1988 |
|
SU1682933A1 |
| Способ измерения погрешности положения штрихов круговых шкал и устройство для его осуществления | 1985 |
|
SU1326886A1 |
| US 6304825 B1, 16.10.2001 | |||
| US 4918443 A, 17.04.1990. | |||

