Область техники
Варианты осуществления настоящего изобретения относятся, в основном, к области управления локомотивом и, в частности, к способу адаптивного определения уровня применения тормоза для осуществления сигнализации удаленному локомотиву поезда при потере связи.
Уровень техники
При функционировании поезда с распределенным снабжением энергией подачу энергии в железнодорожном составе поезда осуществляют из ведущего локомотива и одного или большего количества удаленных локомотивов, находящихся на расстоянии от ведущего локомотива. Каждый ведущий и удаленный локомотив содержит систему управления пневматическим тормозом для управления операциями торможения и систему связи для обмена информацией по линии связи между ведущим и удаленным локомотивами. Тормозная магистраль соединяет посредством текучей среды каждый из локомотивов и автомотрисы поезда, при этом для указания требуемых операций торможения, обычно, используют модуляцию потока текучей среды, например, давление текучей среды в тормозной магистрали. Применение тормоза, обычно, выполняют, выпуская, или уменьшая давление в тормозной магистрали. Однако выпуск из тормозной магистрали только в ведущем локомотиве поезда требует распространения соответствующего уменьшения давления в тормозной магистрали по длине поезда, соответственно замедляя применение тормоза в автомотрисах и удаленных локомотивах вблизи конца поезда. В поездах с распределенным снабжением энергией торможение выполняют более эффективно, осуществляя выпуск из тормозной магистрали в ведущем и в удаленном локомотивах поезда, соответственно, ускоряя выпуск из тормозной магистрали и применение тормозов по всему поезду.
Для поездов c распределенным снабжением энергией с действующей линией связи между ведущим и удаленными локомотивами, обычно, в каждый удаленный блок по линии связи передают беспроводные команды на тягу и торможение, например, при выдаче оператором поезда в ведущем локомотиве команды на применение тормоза. Например, в ответ на беспроводную команду на применение тормоза, каждый удаленный локомотив также осуществляет выпуск из тормозной магистрали. Подобным образом, также по линии радиосвязи передают информацию относительно оттормаживания, инициированного в ведущем локомотиве, и каждый удаленный локомотив может ответить, оттормаживая и нагнетая тормозную магистраль.
В том случае, когда в поезде с распределенным снабжением энергией радиосвязь становится неработоспособной, может потребоваться выдача удаленным локомотивом, испытывающим потерю радиосвязи, команды на ввод режима отказоустойчивости функционирования, например, блокировки нагнетания или выпуска в тормозной магистрали в удаленном локомотиве и/или ослабления состояния тяги удаленного локомотива. Такое состояние отказоустойчивости может быть инициировано посредством применения тормозов в ведущем локомотиве для формирования сигнала применения тормоза тормозной магистрали, распространяемого по тормозной магистрали в удаленный локомотив. Например, когда в ведущем локомотиве обнаруживают состояние потери связи, например, посредством индикатора потери связи на панели управления ведущего локомотива, оператор ведущего локомотива может выдать команду на состояние отказоустойчивости посредством применения минимального применения тормоза к поезду через тормозную магистраль. Сигнал минимального применения тормоза, распространяемый по тормозной магистрали из ведущего локомотива, затем в удаленном локомотиве интерпретируют, как команду на приостановку нагнетания тормозной магистрали и/или на ввод неактивного состояния тяги.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Согласно одному варианту осуществления изобретения создан способ адаптивного определения уровня применения тормоза для сигнализации удаленному локомотиву железнодорожного поезда при потере связи, причем железнодорожный поезд содержит тормозную систему, которая содержит тормозную магистраль, несущую текучую среду, содержащую выпускное отверстие и соединяющую ведущий локомотив и, по меньшей мере, один удаленный локомотив, железнодорожный поезд дополнительно содержит систему связи для осуществления связи между ведущим локомотивом и удаленным локомотивом. Способ включает определение состояния функционирования тормозной системы поезда и определение состояния работоспособности системы связи. Способ также включает идентификацию уровня применения тормоза, заданного командой оператора, в ведущем локомотиве при состоянии неработоспособности системы связи. Способ дополнительно включает определение уровня применения тормоза сигнализации, достаточного для сигнализации удаленному локомотиву через тормозную магистраль, в зависимости от, по меньшей мере, одного из: состояния функционирования тормозной системы, состояния работоспособности системы связи и уровня применения тормоза, заданного командой оператора.
Согласно другому варианту осуществления изобретения создана система для адаптивного определения уровня применения тормоза для сигнализации удаленному локомотиву железнодорожного поезда при потере связи, причем железнодорожный поезд содержит тормозную систему, которая содержит тормозную магистраль, несущую текучую среду, содержащую выпускное отверстие и соединяющую ведущий локомотив и, по меньшей мере, один удаленный локомотив, при этом железнодорожный поезд дополнительно содержит систему связи для осуществления связи между ведущим локомотивом и удаленным локомотивом. Система содержит первый датчик для определения функционирования тормозной системы поезда и второй датчик для определения состояния работоспособности системы связи. Система также содержит третий датчик для идентификации уровня применения тормоза, заданного командой оператора, в ведущем локомотиве при состоянии неработоспособности системы связи. Система дополнительно содержит контроллер, осуществляющий связь с первым, вторым и третьим датчиками и выполненный с возможностью определения уровня применения тормоза сигнализации, достаточного для сигнализации удаленному локомотиву через тормозную магистраль, в зависимости от, по меньшей мере, одного из: состояния функционирования тормозной системы, состояния работоспособности системы связи и уровня применения тормоза, заданного командой оператора.
Согласно другому варианту осуществления изобретения создан машиночитаемый носитель информации, содержащий инструкции программы для адаптивного определения уровня применения тормоза для сигнализации удаленному локомотиву железнодорожного поезда при потере связи, причем железнодорожный поезд содержит тормозную систему, которая содержит тормозную магистраль, несущую текучую среду, содержащую выпускное отверстие и соединяющую ведущий локомотив и, по меньшей мере, один удаленный локомотив, при этом железнодорожный поезд дополнительно содержит систему связи для осуществления связи между ведущим локомотивом и удаленным локомотивом. Машиночитаемый носитель информации содержит код компьютерной программы для определения состояния функционирования тормозной системы поезда и код компьютерной программы для определения состояния работоспособности системы связи. Носитель информации также содержит код компьютерной программы для идентификации уровня применения тормоза, заданного командой оператора, в ведущем локомотиве при состоянии неработоспособности системы связи. Носитель информации дополнительно содержит код компьютерной программы для определения уровня применения тормоза сигнализации, достаточного для сигнализации удаленному локомотиву через тормозную магистраль, в зависимости от, по меньшей мере, одного из: состояния функционирования тормозной системы, состояния работоспособности системы связи и уровня применения тормоза, заданного командой оператора.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Указанные и другие признаки, аспекты и преимущества настоящего изобретения станут более понятны после прочтения последующего подробного описания, согласно приложенным чертежам, на которых использована сквозная нумерация. На чертежах:
Фиг.1 - схематическая диаграмма возможной системы для адаптивного определения применения тормоза для сигнализации удаленному локомотиву поезда с распределенным снабжением энергией при потере связи; и
Фиг.2 - блок-схема возможного способа адаптивного определения применения тормоза для сигнализации удаленному локомотиву поезда с распределенным снабжением энергией при потере связи.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
В поезде с распределенным снабжением энергией, функционирующем в состоянии потери связи, было замечено то, что, если тормозная магистраль не насыщена достаточно из предыдущего состояния торможения, то применение тормоза, осуществляемое оператором ведущего локомотива для выдачи команды удаленному локомотиву на ввод состояния простоя (неработоспособности) и/или на приостановку нагнетания тормозной магистрали, не может распространяться по тормозной магистрали в удаленный локомотив. Следовательно, в течение периода потери связи удаленный локомотив может оставаться в состоянии тяги и/или нагнетания торможения, что может привести к нежелательно длинному тормозному пути, чрезмерно высоким ускорениям поезда и т.д. Для решения вышеупомянутой проблемы оператор поезда должен оценить длину и конфигурацию поезда, определить, применяют ли тормоза поезда, или они освобождены, и оценить состояние нагнетания тормозной магистрали для определения количества снижения давления в тормозной магистрали, которое требуется для достижения требуемого состояния тяги и/или нагнетания в удаленных локомотивах поезда при состоянии потери связи. Была разработана новая схема, которая освобождает оператора от необходимости оценки конфигурации поезда и рабочих параметров поезда для определения уровня применения тормоза, достаточного для сигнализации удаленному локомотиву для достижения требуемого состояния функционирования удаленного локомотива.
На фиг.1 показана схематическая диаграмма возможной системы 10 для адаптивного управления применением тормоза при потере связи для сигнализации удаленному локомотиву из ведущего локомотива 12 поезда, такого как поезд с распределенным снабжением энергией. Система 10 может содержать регулирующий клапан 20 резервуара регулирования/выравнивания, для впуска подачи 40 воздуха. Регулирующий клапан 20 резервуара регулирования/выравнивания может быть выполнен с возможностью функционирования избирательно для выпуска воздуха через выпускной канал 52 и подачи воздуха через соединение текучей среды в резервуар 50 для управления применением и освобождением тормозов поезда. Резервуар 50 также может подавать воздух в клапан 18 управления, который также получает воздух посредством подачи 40 воздуха. Управление регулирующим клапаном 20 резервуара регулирования/выравнивания может быть осуществлено посредством рукоятки 54 тормозного рычага, используемой вручную и/или автоматически избирательно для выпуска воздуха или подачи воздуха в резервуар 50 выравнивания, который в свою очередь управляет тормозной магистралью 14 посредством клапана 18 управления для достижения требуемого уровня применения тормоза или прекращения торможения.
Система 10 также может содержать систему 24 связи, например, беспроводную систему связи, для осуществления связи с одним или более удаленными локомотивами (не показаны) поезда через линию 34 связи. Система связи 24 может формировать сигнал 28 состояния работоспособности связи из системы 24 связи, указывающий, является ли работоспособной линия 34 беспроводной связи для осуществления связи с одним или более удаленными локомотивами поезда. Индикатор 66 может принимать сигнал 28 состояния работоспособности связи и формировать для оператора указание, например, визуальное и/или звуковое, которое зависит от сигнала 28 состояния работоспособности связи.
Согласно аспекту изобретения, система 10 содержит контроллер 16, принимающий сигнал 26 потока текучей среды из датчика 22 потока текучей среды. Датчик 22 потока текучей среды осуществляет мониторинг состояния потока текучей среды тормозной магистрали, такого как поток текучей среды в тормозную магистраль 14 в ведущем локомотиве 12, и формирует сигнал 26 потока текучей среды в зависимости от измеренного состояния потока текучей среды. Контроллер 16 также принимает сигнал 36 давления текучей среды из датчика 32 давления текучей среды. Датчик 32 давления текучей среды может осуществлять мониторинг состояния давления текучей среды тормозной магистрали, например, давления текучей среды в тормозной магистрали 14 в ведущем локомотиве 12, и формировать сигнал 36 давления текучей среды в зависимости от измеренного состояния давления текучей среды. Давление текучей среды тормозной магистрали может указывать уровень применения тормоза, заданный командой, в ведущем локомотиве 12. Контроллер 16 также может принимать из датчика 58 давления резервуара сигнал 56 давления резервуара, зависимый от давления текучей среды в резервуаре 50. Контроллер 16 также принимает из датчика 62 выпускного потока сигнал 60 выпускного потока, зависимый от выпускного потока из регулирующего клапана 20 резервуара регулирования/выравнивания. Контроллер 16 также может принимать из системы 24 связи сигнал 28 состояния работоспособности связи, указывающий, является ли работоспособной линия 34 беспроводной связи для осуществления связи с одним или более удаленными локомотивами 12 поезда. Контроллер 16 также может принимать сигнал состояния применения тормоза, например, зависимый от позиции рычага 54 управления тормозным клапаном, который указывает прекращение торможения или применение тормоза, заданное командой оператора. Контроллер 16 может принимать любой известный вид, например, аналогового или цифрового микропроцессора или компьютера, и он может быть интегрирован в один или более контроллеров или объединен с одним или более контроллерами, которые используют для других функций, относящихся к функционированию ведущего локомотива 12.
В варианте осуществления изобретения контроллер 16 может быть сконфигурирован для обеспечения адаптивной схемы управления применением тормоза для сигнализации через тормозную магистраль удаленному локомотиву поезда с распределенным снабжением энергией при потере связи. Схема может содержать автоматическое управление применением тормоза и/или обеспечение указания оператору поезда, которое должно использоваться для управления применением тормоза. Например, контроллер 16 может быть сконфигурирован для реализации этапов для определения применения тормоза, достаточного для сигнализации удаленному локомотиву для уменьшения тягового усилия и/или предельного нагнетания тормозной магистрали в удаленном локомотиве при состоянии потери связи. На основе определенного достаточного применения тормоза, когда оператор дает команду относительно недостаточного применения торможения при потере связи, контроллер 16 может уведомлять оператора, например, через дисплей 64, о том, что требуется дополнительное применение торможения, чтобы обеспечить распространение сигнала тормоза в удаленный (локомотив). В другом варианте осуществления контроллер 16 может автоматически управлять применением тормоза на основе определенного достаточного применения тормоза для обеспечения выдачи команды на достаточное применение тормоза. Этапы, необходимые для таких процессов, могут быть воплощены в аппаратных средствах, программном обеспечении и/или программируемом оборудовании в любом виде, который является доступным и может быть выполнен процессором 16, и могут храниться на любом носителе информации, который пригоден для конкретного применения, например, в памяти 38.
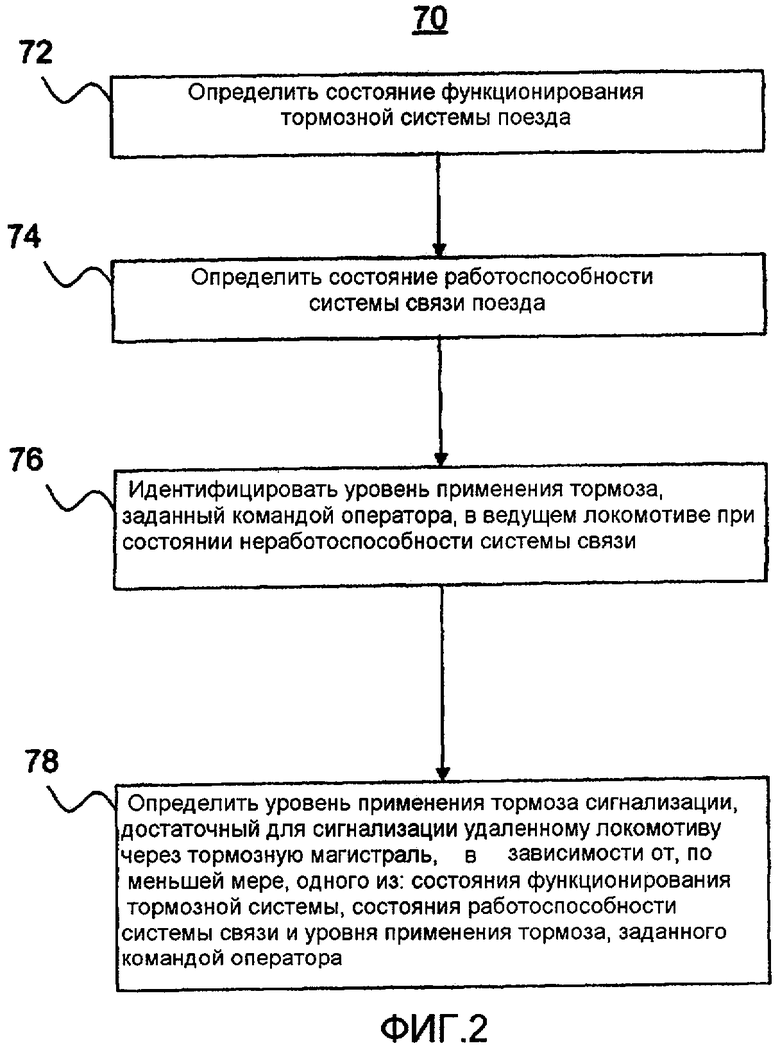
Как показано на блок-схеме 70 на фиг.2, этапы могут содержать определение 72 состояния функционирования тормозной системы поезда и определение 74 состояния работоспособности системы связи. Этапы могут также содержать идентификацию 76 уровня применения торможения, заданного командой оператора, на ведущем локомотиве при состоянии неработоспособности системы связи. Этапы могут также содержать определение уровня применения тормоза сигнализации, достаточного для сигнализации в удаленный локомотив через тормозную магистраль, в зависимости от, по меньшей мере, одного из: состояния функционирования тормозной системы, состояния работоспособности системы связи и уровня применения тормоза, заданного командой оператора.
Для выполнения указанных этапов контроллер 16 на фиг.1 может быть сконфигурирован для осуществления мониторинга состояния торможения поезда, такого как состояние применения тормоза или состояние прекращения торможения, и/или продолжительности состояния торможения. Контроллер 16 может дополнительно осуществлять мониторинг соответствующих состояний функционирования элементов тормозной системы поезда, например, сигналы 26, 36, 60 и 56. При состоянии потери связи, указанном, например, посредством сигнала 28 состояния работоспособности связи, контроллер 16 может использовать наблюдаемое состояние торможения и наблюдаемые сигналы для определения соответствующего применения тормоза для надежной выдачи команды относительно состояния функционирования удаленного локомотива через тормозную магистраль 14.
В возможном варианте осуществления, при возникновении потери связи в продолжение состояния оттормаживания, контроллер 16 может быть сконфигурирован для обеспечения уровня применения тормоза на основе значения сигнала 26 потока тормоза (объема газа, выпускаемого в тормозную магистраль в единицу времени). Контроллер 16 может быть сконфигурирован для формирования меньшего применения для относительно меньшего измеренного потока, и на формирование большего применения для относительно большего измеренного потока. Формирование может содержать обеспечение указания относительно соответствующего уровня применения тормоза и/или также может содержать автоматическое применение соответствующего уровня применения тормоза. Например, когда измеренный поток меньше, чем, приблизительно, 20 кубических футов в минуту (cfm), в качестве достаточного для гарантированного распространения сигнала тормозной магистрали в удаленный локомотив может быть сформировано минимальное служебное применение около 7 фунтов на квадратный дюйм (psi). Соответственно, если оператор создал минимальное служебное применение, то дополнительное применение тормоза может не потребоваться. Для измеренного потока, приблизительно, между 20 cfm и 60 cfm, может быть сформировано полное служебное применение, приблизительно, 15 psi. Соответственно, если оператор создал только минимальное служебное применение, то может потребоваться дополнительное применение тормоза, приблизительно, в 8 psi. Для измеренного потока, большего, чем около 60 cfm, может быть сформировано аварийное применение.
При возникновении потери связи в продолжение состояния применения тормоза, контроллер 16 может быть сконфигурирован для формирования уровня применения тормоза на основе уровня применения тормоза, заданного командой оператора, времени, истекшего с момента применения тормоза и/или выпускного потока тормозной магистрали. Например, при возникновении потери связи при применении тормоза меньше чем около 16 psi, и по истечении более чем около 90 секунд с момента инициации применения тормоза, и когда был прекращен выпуск из тормозной магистрали, например, когда выпускной поток около 0 cfm, контроллером 16 может быть сформировано применение дополнительного тормоза около 10 psi. При возникновении потери связи по истечении меньше чем около 90 секунд с момента применения тормоза, или когда осуществляется выпуск из тормозной магистрали, или когда было создано применение тормоза больше чем 16 psi, контроллером 16 может быть сформировано аварийное применение тормоза.
В другом варианте осуществления изобретения система 10 может содержать память 38, в которой хранится расписание торможений, содержащее несколько уровней применения тормоза, соответствующих применению тормоза и рабочим параметрам тормозной системы поезда. Контроллер 16 может содержать логическую схему для доступа к расписанию торможений, которое хранится в памяти 38, для адаптивного определения уровня применения тормоза для сигнализации в удаленный локомотив поезда с распределенным снабжением энергией при потере связи. Согласно аспекту изобретения, расписание торможений может внедрять уровни применения тормоза в зависимости от рабочих параметров тормозной системы поезда, как описано выше.
На основе описания, приведенного выше, изобретение может быть реализовано с использованием компьютерного программирования или инженерных приемов, включая программное обеспечение, программируемое оборудование, аппаратные средства компьютера или любую их комбинацию, в которых техническое действие заключается в адаптивном определении уровня применения тормоза для сигнализации в удаленный локомотив поезда с распределенным снабжением энергией при потере связи. Любая такая результирующая программа, содержащая средство кода, считываемое компьютером, может быть реализована или обеспечена на одном или большем количестве носителей информации, считываемых компьютером, вследствие этого, создавая компьютерный программный продукт, то есть продукт изготовления, согласно изобретению. Носителем информации, считываемым компьютером, могут быть, например, стационарный (жесткий) диск, дискета, оптический диск, магнитная лента, полупроводниковая память, такая как постоянная память (ПЗУ), и т.д., или любая среда передачи/приема, такая как Интернет или другая сеть связи. Продукт изготовления, содержащий компьютерный код, может быть сделан и/или использован посредством непосредственно выполнения кода из одной среды, или посредством копирования кода из одной среды в другую среду, или посредством передачи кода через сеть связи.
Специалист в области информатики легко сможет скомбинировать программное обеспечение, созданное, как было описано, с соответствующими аппаратными средствами универсального или специализированного компьютера, такими как микропроцессор, для создания вычислительной системы или вычислительной подсистемы, реализующей способ изобретения. Устройством для создания, использования или реализации изобретения может быть одна или большее количество систем обработки, включая центральный процессор (ЦП), память, запоминающие устройства, устройства и линии связи, сервера, устройства ввода - вывода или любые подкомпоненты одной или большего количества систем обработки и т.д., включая программное обеспечение, программируемое оборудование, аппаратные средства или любую их комбинацию, которая воплощает изобретение.
Хотя здесь были проиллюстрированы и описаны различные варианты осуществления настоящего изобретения, очевидно, что такие варианты осуществления обеспечены исключительно в виде возможного варианта. Не отклоняясь от представленного здесь изобретения, могут быть внесены многочисленные модификации и изменения. Соответственно, предполагается, что изобретение должно быть ограничено исключительно контекстом и сущностью приложенной формулы изобретения.
Изобретение относится к области управления локомотивом. Способ, в котором тормозная система железнодорожного поезда содержит тормозную магистраль с текучей средой, содержащую выпускное отверстие и соединяющую ведущий локомотив и удаленный локомотив, при этом поезд дополнительно содержит систему связи для осуществления связи между ведущим локомотивом и удаленным локомотивом. Определяют состояние функционирования тормозной системы поезда, определяют состояние работоспособности системы связи, идентифицируют уровень применения тормоза, заданного командой оператора, в ведущем локомотиве при состоянии неработоспособности системы связи и определяют уровень применения тормоза сигнализации, достаточный для сигнализации удаленному локомотиву через тормозную магистраль, в зависимости от, по меньшей мере, одного из: состояния функционирования тормозной системы, состояния работоспособности системы связи и уровня применения тормоза, заданного командой оператора. Система содержит: первый датчик для определения состояния функционирования тормозной системы поезда, второй датчик для определения состояния работоспособности системы связи, третий датчик для идентификации уровня применения тормоза, заданного командой оператора, в ведущем локомотиве при состоянии неработоспособности системы связи и контроллер. Достигается повышение безопасности движения поезда. 2 н. и 15 з.п. ф-лы, 2 ил.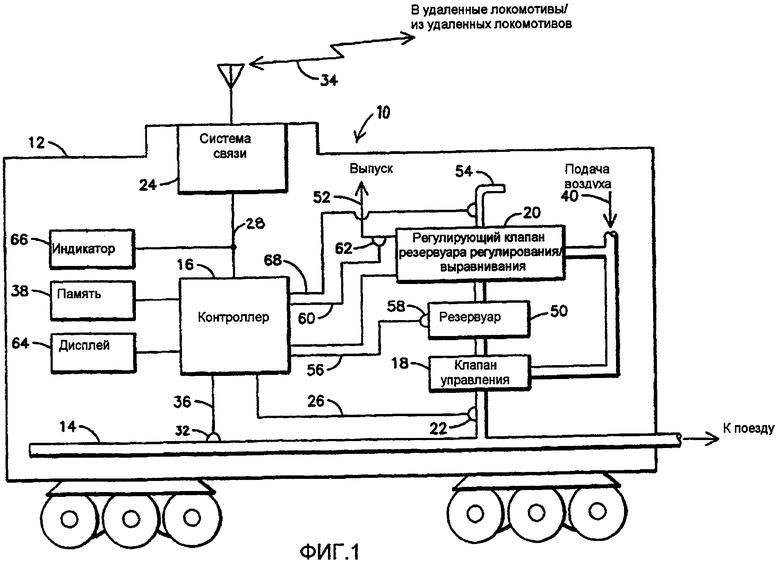
1. Способ адаптивного определения уровня применения тормоза для сигнализации удаленному локомотиву поезда при потере связи в железнодорожном поезде, содержащем тормозную систему, которая содержит тормозную магистраль, с текучей средой, содержащую выпускное отверстие и соединяющую ведущий локомотив и, по меньшей мере, один удаленный локомотив, причем поезд дополнительно содержит систему связи для осуществления связи между ведущим локомотивом и удаленным локомотивом, при котором: определяют состояние функционирования тормозной системы поезда, определяют состояние работоспособности системы связи, идентифицируют уровень применения тормоза, заданного командой оператора, в ведущем локомотиве при состоянии неработоспособности системы связи и определяют уровень применения тормоза сигнализации, достаточный для сигнализации удаленному локомотиву через тормозную магистраль, в зависимости от, по меньшей мере, одного из: состояния функционирования тормозной системы, состояния работоспособности системы связи и уровня применения тормоза, заданного командой оператора.
2. Способ по п.1, при котором дополнительно автоматически применяют дополнительное количество применения тормоза, когда уровень применения тормоза сигнализации больше уровня применения тормоза, заданного командой оператора.
3. Способ по п.1, при котором дополнительно уведомляют оператора ведущего локомотива о том, что требуется дополнительное количество применения тормоза, когда уровень применения тормоза сигнализации больше уровня применения тормоза, заданного командой оператора.
4. Способ по п.1, при котором определение состояния функционирования тормозной системы поезда содержит измерение, по меньшей мере, одного из: потока текучей среды тормозной магистрали, давления текучей среды тормозной магистрали, давления в резервуаре с текучей средой и выпускного потока тормозной системы.
5. Способ по п.1, при котором дополнительно формируют уровень применения тормоза сигнализации в зависимости от измеренного потока текучей среды тормозной магистрали, когда уровень применения тормоза, заданный командой оператора, указывает состояние прекращения торможения.
6. Способ по п.5, при котором дополнительно формируют уровень применения тормоза сигнализации около 7 фунтов на квадратный дюйм, когда измеренный поток текучей среды тормозной магистрали меньше, чем около 20 кубических футов в минуту.
7. Способ по п.5, при котором дополнительно формируют уровень применения тормоза сигнализации около 15 фунтов на квадратный дюйм, когда измеренный поток текучей среды тормозной магистрали составляет от приблизительно 20 кубических футов в минуту до 60 кубических футов в минуту.
8. Способ по п.5, при котором дополнительно формируют аварийный уровень применения тормоза, когда измеренный поток текучей среды тормозной магистрали превышает около 60 кубических футов в минуту.
9. Способ по п.1, при котором дополнительно формируют уровень применения тормоза сигнализации в зависимости от, по меньшей мере, одного из: уровня применения тормоза, заданного командой оператора, времени, истекшего с момента применения тормоза, и выпускного потока тормозной магистрали, когда уровень применения тормоза, заданный командой оператора, указывает состояние применения тормоза.
10. Способ по п.9, при котором дополнительно определяют время, истекшее с инициации уровня применения тормоза, заданного командой оператора, когда идентифицируют состояние неработоспособности системы связи.
11. Способ по п.10, при котором дополнительно измеряют выпускной поток тормозной магистрали.
12. Способ по п.11, при котором дополнительно формируют дополнительный уровень применения тормоза около 10 фунтов на квадратный дюйм, когда уровень применения тормоза, заданный командой оператора, меньше, чем около 16 фунтов на квадратный дюйм, определенное время, истекшее с инициации уровня применения тормоза, заданного командой оператора, больше, чем около 90 с, и измеренный выпускной поток тормозной магистрали составляет около 0 кубических футов в минуту.
13. Способ по п.10, при котором дополнительно формируют аварийное применение тормоза, когда истекло менее около 90 с с инициации уровня применения тормоза, заданного командой оператора.
14. Способ по п.10, при котором дополнительно формируют аварийный уровень применения тормоза, когда поток тормозной магистрали составляет более около 0 кубических футов в минуту.
15. Способ по п.10, при котором дополнительно формируют аварийный уровень применения тормоза, когда уровень применения тормоза, заданный командой оператора, превышает около 16 фунтов на квадратный дюйм.
16. Система для адаптивного определения уровня применения тормоза для сигнализации удаленному локомотиву поезда при потере связи в железнодорожном поезде, содержащем тормозную систему, которая содержит тормозную магистраль с текучей средой, содержащую выпускное отверстие и соединяющую ведущий локомотив и, по меньшей мере, один удаленный локомотив, причем поезд дополнительно содержит систему связи для осуществления связи между ведущим локомотивом и удаленным локомотивом, при этом система содержит: первый датчик для определения состояния функционирования тормозной системы поезда, второй датчик для определения состояния работоспособности системы связи, третий датчик для идентификации уровня применения тормоза, заданного командой оператора, в ведущем локомотиве при состоянии неработоспособности системы связи и контроллер, осуществляющий связь с первым, вторым и третьим датчиками и выполненный с возможностью определения уровня применения тормоза сигнализации, достаточного для сигнализации удаленному локомотиву через тормозную магистраль, в зависимости от, по меньшей мере, одного из: состояния функционирования тормозной системы, состояния работоспособности системы связи и уровня применения тормоза, заданного командой оператора.
17. Система по п.16, дополнительно содержащая память, осуществляющую связь с контроллером, для хранения расписания торможений из содержащихся предварительно определенных уровней применения тормоза сигнализации, соответствующих, по меньшей мере, одному из: состояния функционирования тормозной системы, уровня применения тормоза, заданного командой оператора, и времени, истекшему с момента применения тормоза, когда идентифицировано состояние неработоспособности системы связи.
| US 2003107262 A1, 12.06.2003 | |||
| US 6401015 B1, 04.06.2002 | |||
| СИСТЕМА АВТОМАТИЗИРОВАННОГО ВОЖДЕНИЯ ГРУЗОВЫХ ПОЕЗДОВ ПОВЫШЕННОЙ МАССЫ И ДЛИНЫ С РАСПРЕДЕЛЕННЫМИ ПО ИХ ДЛИНЕ ЛОКОМОТИВАМИ | 2003 |
|
RU2238860C1 |
| ТОРМОЗНАЯ СИСТЕМА ЛОКОМОТИВА | 1998 |
|
RU2198810C2 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ТОРМОЗНОЙ МАГИСТРАЛИ ЖЕЛЕЗНОДОРОЖНОГО СОСТАВА | 2003 |
|
RU2250167C1 |

