Область техники
Настоящее изобретение относится в целом к области управления локомотивами, и, более конкретно, к адаптивной маскировке состояния потока в тормозной магистрали удаленного локомотива поезда с распределенной тягой.
Уровень техники
При работе поезда с распределенной тягой тяговая мощность подается от ведущего локомотива и одного или более удаленных локомотивов, разнесенных относительно ведущего локомотива по длине состава поезда. Каждый ведущий и удаленный локомотив включает в себя систему пневматического тормозного привода для управления операциями торможения и коммуникационную систему для обмена информацией между ведущим и удаленными локомотивами по каналу связи. Тормозная магистраль гидравлически соединяет каждый из локомотивов и вагонов поезда, причем изменение потока текучей среды в тормозной магистрали, например давления текучей среды, традиционно используется для указания требуемых операций торможения. Управление операциями торможения удаленного локомотива может осуществляться согласно измеренным состояниям потока в тормозной магистрали в соответствующих удаленных локомотивах.
Приведение в действие тормозов типично осуществляется путем выпуска воздуха или уменьшения давления в тормозной магистрали. Однако выпуск воздуха из тормозной магистрали только в ведущем локомотиве поезда требует передачи соответствующего уменьшения давления в тормозной магистрали по длине поезда, что замедляет приведение в действие тормозов вагонов и удаленных локомотивов вблизи конца поезда. В поездах с распределенной тягой приведение в действие тормозов более эффективно осуществляется путем выпуска воздуха в тормозной магистрали и в ведущем и в удаленном локомотивах, ускоряя таким образом выпуск воздуха в тормозной магистрали и приведение в действие тормозов по всему поезду. Соответственно, ведущий локомотив может раздельно управлять операциями торможения удаленных локомотивов по каналу связи, чтобы получить более эффективное торможение поезда.
В дополнение к управлению торможением согласно состояниям потока в тормозной магистрали каждый удаленный локомотив может быть выполнен с возможностью независимого управления потоком текучей среды в тормозной магистрали согласно измеренному состоянию потока в тормозной магистрали. Например, каждый удаленный локомотив может быть выполнен с возможностью подзарядки тормозной магистрали согласно измеренной утечке текучей среды в тормозной магистрали. Во время работы поезда с распределенной тягой необходимо ограничивать способность удаленных локомотивов регулировать поток текучей среды в тормозной магистрали. Например, во время подзарядки тормозной магистрали после приведения в действия тормозов и соответствующего отпуска тормозов, указание потока в тормозной магистрали в удаленном локомотиве может игнорироваться или маскироваться, чтобы не дать удаленному локомотиву помешать подзарядке тормозной магистрали.
Краткое описание чертежей
На чертеже представлена блок-схема примера системы для адаптивной маскировки состояния потока в тормозной магистрали в удаленном локомотиве поезда с распределенной тягой.
Подробное описание изобретения
Изучив работу поезда с распределенной тягой, изобретатели настоящего изобретения заметили, что период времени, требуемый для снижения и стабилизации давления в тормозной магистрали во время приведения в действие тормозов, зависит от заданной степени приведения в действие тормозов и длины поезда. Например, было замечено, что при осуществлении полного служебного приведения в действие тормозов из состояния отпущенных тормозов время, требуемое для снижения давления в тормозной магистрали от начального давления и его стабилизации на уровне более низкого давления полного служебного торможения, получилось больше, чем время, требуемое для меньшего приведения в действие тормозов, такого как, например, минимальное служебное приведение в действие тормозов. Однако традиционные схемы маскировки потока в тормозной магистрали типично маскируют поток в тормозной магистрали в удаленном локомотиве в течение установленного периода времени, например 90 секунд, независимо от степени осуществляемого приведения в действие тормозов. Изобретателями было замечено, что данный фиксированный период времени может быть слишком коротким в некоторых случаях, например при полном служебном приведении в действие тормозов, что приводит к получению удаленным локомотивом непредвиденных данных о состояниях потока, что может заставить удаленный локомотив реагировать несоответствующим образом, особенно в удаленных локомотивах, располагающихся вблизи конца длинных поездов. И наоборот, фиксированный период времени может быть чрезмерно длинным в некоторых случаях, например после минимального служебного приведения в действие тормозов, когда поток в тормозной магистрали маскируется еще долгое время после того, как поток в тормозной магистрали был стабилизирован, тем самым препятствуя выполнению удаленным локомотивом операций торможения согласно потоку. Соответственно, изобретателями была разработана инновационная схема для адаптивной маскировки состояния потока в тормозной магистрали в удаленном локомотиве поезда с распределенной тягой таким образом, чтобы исключить нежелательную работу удаленного локомотива.
На чертеже представлена блок-схема примера системы 10 для адаптивной маскировки состояния потока в тормозной магистрали в удаленном локомотиве 12 поезда с распределенной тягой. Предпочтительно, система 10 блокирует способность удаленного локомотива 12 реагировать на непредвиденное состояние потока в тормозной магистрали на период времени, соответствующий состоянию торможения поезда и измеренной степени изменения давления в тормозной магистрали. Соответственно, нежелательная работа удаленного локомотива 12, например, в ответ на непредвиденное состояние потока в тормозной магистрали, может быть эффективно ограничена.
Система 10 может включать в себя систему 18 управления тормозами, находящуюся в гидравлической связи с тормозной магистралью 14 через клапан 20 тормозной магистрали, причем система 18 управления тормозами управляет потоком текучей среды в тормозной магистрали в удаленном локомотиве 12. Клапан 20 тормозной магистрали выполнен с возможностью отключения удаленного локомотива 12 от управления потоком в тормозной магистрали, например, путем разрыва гидравлической связи между системой 18 управления тормозами и тормозной магистралью 14. Соответственно, клапан 20 тормозной магистрали может быть выполнен с возможностью препятствовать или позволять подзарядку и выпуск воздуха из тормозной магистрали в удаленном локомотиве 12. Система 10 может также включать в себя коммуникационную систему 24, например беспроводную коммуникационную систему, для приема команд, подаваемых ведущим локомотивом через линию 34 связи.
Согласно одному аспекту настоящего изобретения система 10 включает в себя процессор 16, принимающий сигнал 26 потока текучей среды от датчика 22 потока текучей среды и/или получающий сигнал 36 давления текучей среды от датчика 32 давления текучей среды. Датчик 22 потока текучей среды отслеживает состояние потока текучей среды в тормозной магистрали, например потока текучей среды в тормозную магистраль 14 в удаленном локомотиве 12, и генерирует сигнал 26 потока текучей среды, соответствующий измеренному состоянию потока текучей среды. Датчик 32 давления текучей среды может отслеживать состояние давления текучей среды в тормозной магистрали, например давление текучей среды в тормозной магистрали 14 в удаленном локомотиве 12, и генерирует сигнал 36 давления текучей среды, соответствующий измеренному состоянию давления текучей среды. Процессор 16 может быть любого вида, которые известны в современном уровне техники, например быть аналоговым или цифровым микропроцессором или компьютером, и он может быть интегрирован в или объединен с одним или более контроллерами, используемыми для других функций, относящихся к работе удаленного локомотива 12.
Процессор 16 может быть сконфигурирован непосредственно или косвенно управлять работой системы 30 управления регулятора, например, согласно сигналу 26 потока текучей среды или сигналу 36 давления текучей среды. Процессор 16 может также получать сигнал 28 состояния работоспособности связи от коммуникационной системы 24, указывающий действует ли беспроводная линия связи с ведущим локомотивом для приема тяговых команд и/или команд торможения. Процессор 16 может управлять системой 30 управления регулятора и/или клапаном 20 тормозной магистрали согласно сигналу 28 состояния.
В варианте осуществления настоящего изобретения процессор 16 может быть сконфигурирован для блокировки способности удаленного локомотива 12 реагировать на непредвиденное состояние потока в тормозной магистрали на период времени переменной продолжительности согласно сигналу 36 давления текучей среды, например, путем игнорирования или маскировки сигнала 26 потока текучей среды. Например, процессор 16 может быть сконфигурирован для выполнения этапов по адаптивной маскировке состояния потока в тормозной магистрали во время изменения состояния торможения поезда, чтобы ограничить способность удаленных локомотивов реагировать на состояния потока в тормозной магистрали, например непредвиденные состояния потока в тормозной магистрали, во время периода маскировки. Этапы, необходимые для выполнения таких процессов, могут реализовываться с помощью аппаратных, программных и/или программно-аппаратных средств в любой форме, которая доступна и выполнима для процессора 16, и могут храниться в любом носителе информации, который удобен для конкретного применения, например в памяти 38.
В варианте осуществления настоящего изобретения процессор 16 может быть сконфигурирован для определения состояния торможения поезда, например состояния приведения в действие тормозов или состояния отпуска тормозов. Например, процессор 16 может определять состояние торможения на основании последней полученной команды торможения для ведущего локомотива. Процессор 16 может также быть сконфигурирован для определения степени изменения в давлении в тормозной магистрали во время идентифицируемого состояния торможения, например падения давления, указывающего на приведение в действие тормозов, или увеличения давления, указывающего на отпуск тормозов. Процессор 16 может затем быть сконфигурирован для адаптивной блокировки способности удаленного локомотива реагировать на непредвиденное состояние потока в тормозной магистрали на период времени, соответствующий идентифицированному состоянию торможения и измеренной степени изменения давления в тормозной магистрали, так что нежелательная работа удаленного локомотива ограничивается во время периода маскировки. В примерном варианте осуществления процессор 16 может быть сконфигурирован для блокировки удаленного локомотива 12 на более короткий период времени для относительно меньшего изменения давления в тормозной магистрали, и блокировки удаленного локомотива 12 на более длинный период времени для относительно большего изменения давления в тормозной магистрали. Периоды времени блокировки или маскировки могут быть сконфигурированы в зависимости от того, является ли состояние торможения состоянием приведения в действие тормозов или состоянием отпуска тормозов.
В другом примерном варианте осуществления два различных по продолжительности периода времени могут использоваться в зависимости от степени измеренного изменения давления в тормозной магистрали. Например, когда поезд находится в состоянии отпуска тормозов, продолжительность периода времени маскировки может быть установлена порядка 90 секунд для указания приведения в действие тормозов, соответствующее падению измеряемого давления в тормозной магистрали меньше чем порядка 21 фунт на квадратный дюйм (psi). Для указания приведения в действие тормозов, соответствующее падению измеряемого давления в тормозной магистрали больше или равному порядка 21 фунт на квадратный дюйм, продолжительность периода времени маскировки может быть установлена порядка 105 секунд. Когда поезд находится в состоянии приведения в действие тормозов, продолжительность периода времени маскировки может быть установлена порядка 90 секунд для указания приведения в действие тормозов, соответствующее падению измеряемого давления в тормозной магистрали меньше чем порядка 14 фунтов на квадратный дюйм (psi). Для указания приведения в действие тормозов, соответствующее падению измеряемого давления в тормозной магистрали больше или равному порядка 14 фунт на квадратный дюйм продолжительность периода времени маскировки может быть установлена порядка 105 секунд.
В еще одном варианте осуществления два или более различных по продолжительности периода времени могут использоваться в зависимости от степени измеренного изменения давления в тормозной магистрали. Например, когда поезд находится в состоянии отпуска тормозов, продолжительность периода времени маскировки может быть установлена порядка 60 секунд для указания приведения в действие тормозов меньше чем порядка 10 фунтов на квадратный дюйм, порядка 90 секунд для указания приведения в действие тормозов между порядка 10 и 21 фунтов на квадратный дюйм, и порядка 105 секунд для указания приведения в действие тормозов больше чем порядка 21 фунтов на дюйм. Когда поезд находится в состоянии приведения в действие тормозов, продолжительность периода времени маскировки может быть установлена порядка 60 секунд для указания приведения в действие тормозов меньше чем порядка 3 фунтов на квадратный дюйм, порядка 90 секунд для указания приведения в действие тормозов между порядка 3 и 14 фунтов на квадратный дюйм, и порядка 105 секунд для указания приведения в действие тормозов больше чем порядка 14 фунтов на дюйм. Аналогичным образом, различные продолжительности периода времени маскировки могут также использоваться для операций отпуска тормозов, например, из состояния приведения в действие тормозов, согласно измеренным уровням изменения давления в тормозной магистрали.
В другом примерном варианте осуществления изобретения система 10 может включать в себя память 38, в которой хранится регламент маскировки, содержащий ряд периодов времени маскировки различной продолжительности, каждый период времени соответствует определенной степени изменения давления текучей среды в тормозной магистрали. Процессор 16 может включать в себя логическое устройство, выполняющее доступ к регламенту маскировки, хранящемуся в памяти 38 для блокировки способности удаленного локомотива 12 реагировать на непредвиденное состояние потока в тормозной магистрали на период времени маскировки продолжительностью, соответствующей измеренной степени изменения давления текучей среды в тормозной магистрали. Согласно одному аспекту изобретения регламент маскировки может содержать периоды времени маскировки продолжительностью, соответствующей уровням приведения в действие тормозов, описанным выше.
На основе вышеприведенного описания изобретение может быть реализовано, используя программирование или проектирование, включая программные, программно-аппаратные, аппаратные средства или любую их комбинацию или подгруппу, которые обеспечивают технический эффект, заключающийся в адаптивной маскировке состояния потока в тормозной магистрали в удаленном локомотиве поезда с распределенной тягой. Любая программа, дающая такой результат, имеющая машиночитаемый код, может быть интегрирована внутри одного или более машиночитаемого носителя информации, получая тем самым программный продукт, т.е. изделие, согласно изобретению. Машиночитаемым носителем информации может быть, например, жесткий диск, дискета, оптический диск, магнитная лента, полупроводниковая память, например постоянная память (ROM), и т.д., или любое средство для приема/передачи информации, например интернет или другая сеть связи или канал связи. Изделие, содержащее машинный код, может быть изготовлено и/или использовано путем извлечения кода непосредственно с носителя информации, путем копирования кода с одного носителя информации на другой носитель информации, или путем передачи кода по сети.
Специалист в области вычислительной техники будет в состоянии легко объединить программное обеспечение, созданное, как было описано выше, с подходящими компьютерными аппаратными средствами общего или специального назначения, например микропроцессором, чтобы создать компьютерную систему или подсистему, реализующую способ по настоящему изобретению. Устройством для изготовления, использования или продажи изобретения может быть одна или более систем обработки данных, включающих в себя, но не ограничиваясь этим, центральный процессор (ЦП), память, устройства хранения данных, устройства и линии связи, серверы, устройства ввода-вывода данных, или любые подкомпоненты одной или более систем обработки данных, включающие в себя программные, программно-аппаратные, аппаратные средства или любую их комбинацию или подгруппу, которые реализуют изобретение.
Хотя здесь были показаны и описаны различные варианты осуществления настоящего изобретения, очевидно, что эти варианты осуществления приведены только с целью примера. Множество вариантов, изменений и замен могут быть выполнены не выходя за пределы объема изобретения. Например, способ и система, описанные здесь, могут быть применены в любой транспортной системе, содержащей элементы, соединенные друг с другом тормозной магистралью с текучей средой, такой как поезд, полуприцеп с тягачами, и т.д. Соответственно изобретение ограничивается только сущностью и объемом прилагаемой формулы изобретения.
Изобретение относится к области управления локомотивами. Предложены способ и система адаптивной блокировки способности удаленного локомотива реагировать на непредвиденное состояние потоков тормозной магистрали. Транспортная система содержит датчик давления, процессор для определения состояния торможения поезда, несущую текучую среду тормозную магистраль (14), соединяющую управляющий объект системы и управляемый объект (12) системы, включающий в себя определение состояния торможения транспортной системы. Способ также включает в себя определение степени изменения давления в тормозной магистрали вблизи управляемого объекта во время состояния торможения, блокировку способности управляемого объекта реагировать на непредвиденное состояние потока в тормозной магистрали на период времени, соответствующий состоянию торможения и степени изменение давления в тормозной магистрали, так что нежелательная работа управляемого объекта ограничивается. Достигается более эффективное торможение поезда. 4 н. и 16 з.п. ф-лы, 1 ил.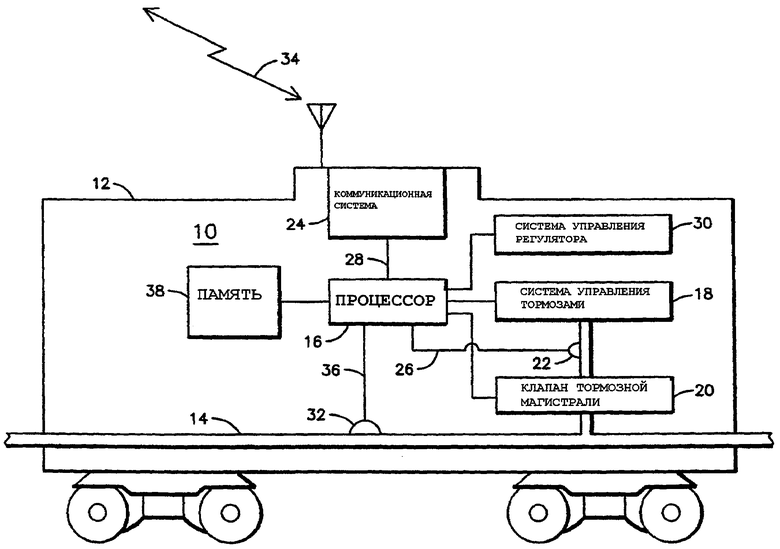
1. Способ адаптивной блокировки способности удаленного локомотива реагировать на непредвиденное состояние потока в тормозной магистрали в поезде, содержащем несущую текучую среду тормозную магистраль, соединяющую ведущий локомотив и по меньшей мере один удаленный локомотив, при этом способ включает в себя определение состояния торможения поезда; определение степени изменения давления в тормозной магистрали вблизи удаленного локомотива во время состояния торможения; и блокировку способности удаленного локомотива реагировать на непредвиденное состояние потока в тормозной магистрали на период времени, соответствующий состоянию торможения и степени изменения давления в тормозной магистрали, так что нежелательная работа удаленного локомотива ограничивается.
2. Способ по п.1, в котором блокировка способности удаленного локомотива реагировать включает в себя маскировку указания потока текучей среды в тормозной магистрали в удаленном локомотиве.
3. Способ по п.1, в котором продолжительность периода времени основывается на степени изменения давления в тормозной магистрали, когда состояние торможения поезда является состоянием отпуска тормозов.
4. Способ по п.1, в котором продолжительность периода времени основывается на степени изменения давления в тормозной магистрали, когда состояние торможения поезда является состоянием приведения в действие тормозов.
5. Способ по п.1, в котором степень изменения давления в тормозной магистрали указывает на приведение в действие тормозов.
6. Способ по п.1, в котором степень изменения давления в тормозной магистрали указывает на отпуск тормозов.
7. Способ по п.1, в котором период времени имеет более короткую продолжительность для относительно меньшего изменения давления в тормозной магистрали и более длинную продолжительность для относительно большего изменения давления в тормозной магистрали.
8. Способ по п.1, в котором продолжительность периода времени определяется согласно регламенту маскировки, включающему в себя ряд интервалов продолжительности маскировки, при этом каждый интервал соответствует заданной степени изменения давления в тормозной магистрали.
9. Система блокировки способности удаленного локомотива реагировать на непредвиденное состояние потока в тормозной магистрали в поезде, содержащем несущую текучую среду тормозную магистраль, соединяющую ведущий локомотив и по меньшей мере один удаленный локомотив, включающая в себя датчик давления в тормозной магистрали для измерения давления текучей среды в тормозной магистрали вблизи первого удаленного локомотива и для обеспечения сигнала давления, соответствующего измеренному давлению текучей среды; и процессор, сконфигурированный для определения состояния торможения поезда, для определения степени изменения давления в тормозной магистрали во время состояния торможения на основании сигнала давления; и для блокировки способности удаленного локомотива реагировать на непредвиденное состояние потока в тормозной магистрали на период времени, соответствующий состоянию торможения и степени изменения давления в тормозной магистрали, так что нежелательная работа удаленного локомотива ограничивается.
10. Система по п.9, в которой блокировка способности удаленного локомотива реагировать включает в себя маскировку указания потока текучей среды в тормозной магистрали в удаленном локомотиве.
11. Система по п.9, в которой продолжительность периода времени основывается на степени изменения давления в тормозной магистрали; когда состояние торможения поезда является состоянием отпуска тормозов.
12. Система по п.9, в которой продолжительность периода времени основывается на степени изменения давления в тормозной магистрали; когда состояние торможения поезда является состоянием приведения в действие тормозов.
13. Система по п.9, в которой степень изменения давления в тормозной магистрали указывает на приведение в действие тормозов.
14. Система по п.9, в которой степень изменения давления в тормозной магистрали указывает на отпуск тормозов.
15. Система по п.9, в которой период времени имеет более короткую продолжительность для относительно меньшего изменения давления в тормозной магистрали и более длинную продолжительность для относительно большего изменения давления в тормозной магистрали.
16. Система по п.9, в которой продолжительность периода времени определяется согласно регламенту маскировки, включающему в себя ряд интервалов продолжительности маскировки, при этом каждый интервал соответствует заданной степени изменения давления в тормозной магистрали.
17. Система блокировки способности удаленного локомотива реагировать на непредвиденное состояние потока в тормозной магистрали в поезде, содержащем несущую текучую среду тормозную магистраль, соединяющую ведущий локомотив и по меньшей мере один удаленный локомотив, включающая в себя датчик давления в тормозной магистрали для измерения давления текучей среды в тормозной магистрали вблизи удаленного локомотива и для обеспечения сигнала давления, соответствующего измеренному давлению текучей среды; и память, хранящую регламент маскировки, включающий в себя ряд периодов времени продолжительности маскировки, при этом каждый период времени основывается на соответствующей степени изменения давления текучей среды в тормозной магистрали; и процессор, содержащий логическое устройство, выполняющее доступ к регламенту маскировки, хранящемуся в памяти, на основании сигнала давления, чтобы блокировать способность удаленного локомотива реагировать на непредвиденное состояние потока в тормозной магистрали на период времени продолжительности маскировки, соответствующий измеренной степени изменения давления в тормозной магистрали, так что нежелательная работа удаленного локомотива ограничивается.
18. Система по п.17, в которой каждый период времени продолжительности маскировки регламента маскировки дополнительно основывается на состоянии торможения поезда.
19. Система по п.18, в которой процессор дополнительно содержит логическое устройство, выполняющее доступ к регламенту маскировки в соответствии с состоянием торможения поезда.
20. Способ адаптивной блокировки способности управляемого объекта реагировать на непредвиденное состояние потока в тормозной магистрали в транспортной системе, содержащей несущую текучую среду в тормозную магистраль, соединяющую управляющий объект системы и управляемый объект системы, включающий в себя определение состояния торможения транспортной системы; определение степени изменения давления в тормозной магистрали вблизи управляемого объекта во время состояния торможения; и блокировку способности управляемого объекта реагировать на непредвиденное состояние потока в тормозной магистрали на период времени, соответствующий состоянию торможения и степени изменения давления в тормозной магистрали, так что нежелательная работа управляемого объекта ограничивается.
| Устройство для управления тормозами поезда | 1970 |
|
SU473627A1 |
| Электронная система управления торможением оборудованного двигателем тягача | 1989 |
|
SU1809813A3 |
| Гидротормоз для вагонов скоростных поездов | 1973 |
|
SU552230A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| US 6435623 B1, 20.08.2002. | |||

