Область техники, к которой относится изобретение
Настоящее изобретение относится к способу управления краном, в котором управляют участком троса, соединенным с крюком крана, посредством фрикционного приводного колеса и наматывают лишний трос на накопительный барабан в несколько слоев, для чего используют два механизма, первый из которых предназначен для приводного колеса, а другой - для накопительного барабана.
Уровень техники
В подъемных устройствах, когда подъемный крюк находится в верхнем положении, грузоподъемный трос обычно намотан на барабан в один слой. Однако известны технические решения, в которых производится намотка излишка троса на накопительный барабан. В таких конструкциях достаточное трение создается посредством приводного колеса и шкива, и тем самым для натяжения троса на накопительном барабане требуется лишь небольшое усилие, создаваемое, например, спиральной пружиной. Одно из технических решений заключается в намотке троса непосредственно на ведущий барабан в несколько слоев.
Впрочем, в частности, при очень большой высоте подъема, если трос укладывать в один слой, сам тросовый барабан получается длинным. В этом случае для барабана требуется много места и, теоретически, требуется прочная конструкция. Длина барабана также заставляет трос «блуждать» вдоль нее в зависимости от высоты подъема крюка. В барабанных конструкциях угол отклонения троса оказывается большим, что сокращает эксплуатационный ресурс троса. Угол отклонения троса - это угол схода троса с приводного колеса или барабана. Использование накопительного барабана вышеуказанным образом приводит к большому крутящему моменту в механизме приводного колеса. При этом управление накопительным барабаном требует некоторого устройства для регулирования натяжения троса. Использование спиральной пружины затруднительно, если высота подъема велика. Подъемное устройство с непосредственной намоткой троса на барабан в несколько слоев также требует большого крутящего момента. Кроме того, эксплуатационный срок службы троса оказывается небольшим, поскольку намотка троса на барабан производится с большим усилием.
Раскрытие изобретения
Таким образом, задача настоящего изобретения заключается в устранении вышеописанных недостатков. Решение задачи достигается способом, соответствующим настоящему изобретению, отличающимся тем, что он включает в себя управление одним из механизмов посредством команд задания скорости, а другим механизмом - командами задания крутящего момента.
В основе изобретения лежит использование двух грузоподъемных механизмов. Грузоподъемный механизм содержит электрический двигатель и, в общем случае, редуктор. Безредукторные приводы также практически осуществимы. Один из механизмов вращает фрикционное приводное колесо, а второй механизм приводит в движение накопительный барабан, на который в несколько слоев наматывается трос. В предпочтительном варианте регулирование механизма, вращающего приводное колесо, осуществляется командами задания скорости вращения, а регулирование механизма накопительного барабана осуществляется командами задания крутящего момента. Команда задания скорости подается оператором подъемного устройства или управляющим компьютером. Команда задания скорости управляет скоростью движения подъемного крюка.
Способ, соответствующий настоящему изобретению, обеспечивает накопительный барабан эффективным механизмом регулировки натяжения троса и одновременно обеспечивает более низкий крутящий момент на фрикционном приводном колесе по сравнению с известными техническими решениями. Также обеспечивается предпочтительная компактная и теоретически прочная конструкция. Исключено отклонение троса под углом и тем самым увеличен эксплуатационный ресурс троса. В соответствии с изобретением положение троса не «блуждает» с изменением высоты подъема. Согласно изобретению эксплуатационный срок службы троса увеличивается за счет уменьшенной силы его натяжения на накопительном барабане по сравнению с подъемными устройствами с непосредственной намоткой троса на барабан.
В предпочтительном варианте осуществления соответствующего изобретению способа команду задания крутящего момента на накопительном барабане изменяют при переходе от одного слоя укладки троса к другому, так чтобы усилие на участке троса между накопительным барабаном и фрикционным приводным колесом оставалось постоянным. Кроме того, усилие на участке троса между накопительным барабаном и фрикционным приводным колесом поддерживается равным половине усилия на участке троса между фрикционным приводным колесом и крюком. Однако здесь может быть установлено и другое соотношение усилий. Крутящий момент изменяется, когда происходит смена слоя намотки троса на накопительном барабане. Если происходит переход на новый слой, то крутящий момент должен быть увеличен, а если происходит переход на нижележащий слой, то крутящий момент должен быть уменьшен. Чтобы контролировать моменты смены слоев намотки троса, в памяти компьютера, управляющего механизмами, должна быть сохранена таблица, в которой записаны моменты смены слоев в зависимости от положения механизма. Такую информацию проще всего получить при помощи обучающего прогона. Обучающий прогон выполняют при вводе устройства в действие.
В другом варианте осуществления соответствующего изобретению способа управление накопительным барабаном осуществляют командами задания скорости, а управление приводным колесом - командами задания крутящего момента. В этом случае управляющий компьютер содержит в себе таблицу для изменения скорости вращения накопительного барабана в функции длины троса, так чтобы скорость движения крюка по величине оставалась равной скорости, задаваемой командой.
Предпочтительные варианты осуществления изобретения раскрыты в пунктах 2-9 прилагаемой формулы изобретения.
Краткое описание чертежей
Варианты выполнения настоящего изобретения будут подробнее описаны ниже применительно к крану, используемому в соответствующем изобретению способе, со ссылками на прилагаемые чертежи, на которых:
фиг.1 изображает схему крана, используемого в способе, соответствующем настоящему изобретению;
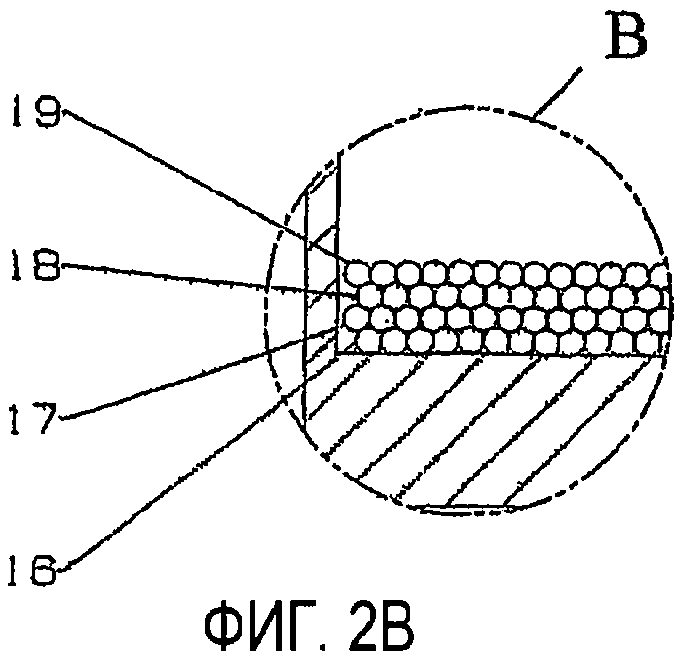
фиг.2А и 2В иллюстрируют устройство накопительного барабана;
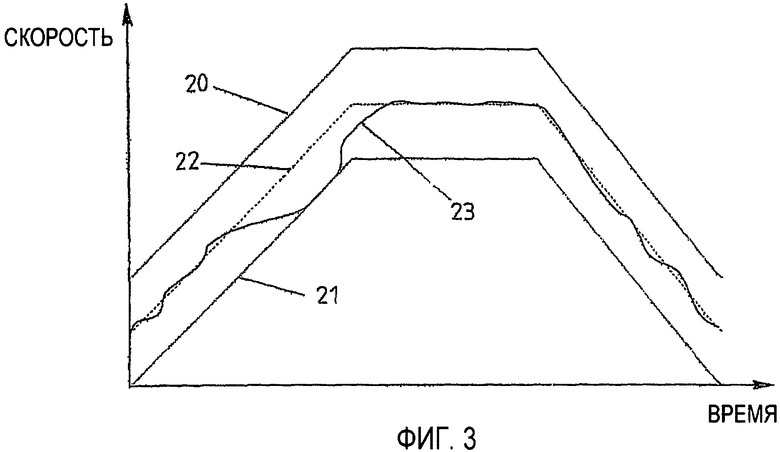
фиг.3 иллюстрирует команду задания скорости;
фиг.4 представляет собой блок-схему, иллюстрирующую взаимодействие компьютера с электронными устройствами с целью управления механизмами крана, соответствующего изобретению.
Осуществление изобретения
На фиг.1 показана более подробная схема построения крана, который используется в способе, соответствующем настоящему изобретению. Узлы 1 и 2 работают в качестве грузоподъемных механизмов. Механизм 1 приводится в движение электрическим приводом 9, а механизм 2 приводится в движение электрическим приводом 10. Обычно используются приводы с частотным преобразованием, но для осуществления подобного изобретения могут быть использованы и приводы постоянного тока. Механизм 1 вращает фрикционное приводное колесо 3, а механизм 2 приводит во вращение накопительный барабан 4. Шкив 8 требуется для получения достаточно большого угла захвата для троса. Увеличение угла захвата приводит к увеличению силы трения. Системы 6 и 7 шкивов образуют стандартную тросовую передачу для уменьшения потребного усилия на тросе. Крюк (не показан) крана прикреплен к нижней системе 7 шкивов. Участок 5 троса прикреплен к неподвижной точке в верхней части конструкции крана. Валы механизмов содержат датчики 14 и 15 угла, которые передают данные о скорости вращения и угловом положении механизмов. Информация о положении, в частности, необходима применительно к обучающей программе. Датчики 14 и 15 производят обнаружение изменения скорости при смене слоя намотки троса на барабане. Данная конструкция обеспечивает контакт между тросом и фрикционным колесом в пределах угла 270-360°. Согласно фиг.1 трос вначале обводится вокруг приводного колеса 3, а затем вокруг свободно вращающегося шкива 7, после чего снова приходит на приводное колесо 3. Видно, что угол эффективного контакта приводного колеса 3 с тросом составляет 270°. Видно также, что, если накопительный барабан 4 разместить иным образом, то можно получить угол контакта величиной, например, 360-540°. Однако существенным является то, что в данном случае угол контакта остается небольшим. Если бы барабан 4 не тянул трос, то для создания достаточной силы трения потребовался бы угол контакта порядка 1000°, что является обычным в существующих конструкциях. А когда барабан 4 тянет трос, от фрикционного колеса 3 требуется сила трения, примерно вполовину меньшая, чем в конструкции без тянущего барабана. Вот почему угол контакта может лежать в интервале от 270 до 540°. Кроме того, можно использовать канавки полукруглого сечения без подрезки. В этом случае истирание троса в процессе протяжки будет сравнительно небольшим. Это увеличивает срок эксплуатации троса. Также будет умеренным и усилие, развиваемое на валу приводного колеса.
Работа системы построена таким образом, что усилие на участке 12 троса между фрикционным приводным колесом 3 и накопительным барабаном 4 находится в определенном соотношении с усилием на участке 13 троса между приводным колесом 3 и крюком. Это соотношение составляет, например, 1/2, однако могут также быть использованы и другие соотношения. Указанное соотношение регулируется надлежащим изменением усилия на участке 12 троса. Если требуется, чтобы на тросе, который поступает на барабан 4 и укладывается в несколько слоев, создавалось постоянное усилие, то на валу барабана 4 требуется создавать крутящий момент, который изменяется в зависимости от количества троса на барабане 4 и, следовательно, зависит от того слоя, куда происходит укладка троса. Это объясняется тем, что радиус между осью барабана 4 и самим тросом изменяется по мере того, как изменяется количество троса на барабане. Когда на барабане 4 начинает формироваться новый слой, указанный радиус всегда увеличивается. Вот почему требуется, чтобы управляющий компьютер изменил команду задания крутящего момента. Чтобы это произошло, компьютер, управляющий механизмом, должен знать, когда происходит изменение направления укладки троса на барабане 4. Чтобы получить такую информацию, в компьютере используется обучающая программа. Обучающий прогон выполняется при постоянной скорости вращения механизма 2. В этом случае механизм 1 осуществляет привод согласно команде задания малого крутящего момента. При таких условиях сам кран осуществляет привод с постоянной скоростью подъема, контролируемой компьютером, от одной крайней точки до другой крайней точки. В этом случае, когда трос начинает наматываться в новый слой, всегда происходит изменение скорости вращения механизма 1. Компьютер 11 контролирует положение и скорость вращения посредством датчиков 14 и 15 на валах механизмов. Точка, где обнаружено изменение, записывается в память компьютера. В результате формируется таблица, посредством которой при нормальной работе привода можно управлять изменением момента, которое требуется для барабана 4. При нормальном приводе информация о текущем слое используется для изменения крутящего момента, создаваемого механизмом 2, так чтобы усилие на тросе было постоянным. Участок 13 троса, соединенный с крюком крана, управляется посредством фрикционного приводного колеса 3, а лишний трос наматывается в виде множества слоев на накопительный барабан 4.
На фиг.2 показано строение накопительного барабана. Разные слои троса обозначены номерами 16, 17, 18 и 19.
На фиг.3 показаны границы 20 и 21 области команд. На фиг.3 команда 22 задания скорости принимает различные значения - от положительных до отрицательных. Кривая 23 показывает выполнение команд задания скорости, где также показано проскальзывание троса при отрицательной скорости. В этом случае проскальзывание парируется командой задания скорости, которая достигает границы области команд. Проскальзывание в основном возникает при малых нагрузках или в случае привода без нагрузки. В такой ситуации проскальзывание можно парировать увеличением крутящего момента накопительного барабана 4. Впрочем, в таком случае необходимость в большом суммарном крутящем моменте отсутствует и увеличение крутящего момента накопительного барабана позволительно.
На фиг.4 блок 28 изображает команду задания скорости, исходящую от оператора или иного управляющего объекта, при этом указанная команда проходит по системе в виде сигнала 36 и попадает в управляющий компьютер 11. Компьютер далее выдает команду 38 задания скорости в электрический привод 9 приводного колеса 3. Привод колеса 3 следит за крутящим моментом, создаваемым нагрузкой, и посылает информацию о нем в суммирующее устройство 27 в виде сигнала 32. Кроме того, в суммирующее устройство 27 в виде сигнала 33 поступает информация 26 о предварительном натяжении троса. Указанная информация о предварительном натяжении необходима для случая отсутствия нагрузки, чтобы не происходило ослабления троса 12 между приводным колесом 3 и накопительным барабаном 4. Если натяжение троса 12 ослабевает, то это мешает контролируемой намотке троса на накопительный барабан 4. Когда на подъемном механизме есть нагрузка, предварительное натяжение может быть нулевым. Команда задания крутящего момента с поправкой на предварительное натяжение поступает на перемножающее устройство 37. В качестве второго множителя на данное устройство приходит коэффициент 35 деления крутящего момента. Компьютер 11 вычисляет данный коэффициент таким образом, чтобы соотношение усилий на участках 12 и 13 троса оставалось таким, какое требуется. Окончательная команда 31 задания крутящего момента с перемножающего устройства 37 поступает на электрический привод 10 накопительного барабана. Накопительный барабан 4 выдает в управляющий компьютер 11 информацию 46 о своем положении. Компьютер использует указанную информацию о положении для определения момента смены слоя намотки троса. Когда происходит смена слоя, компьютер изменяет коэффициент 35 деления крутящего момента. Чтобы сформировать область команд задания скорости, компьютер 11 вычисляет данные 42 скорости, подходящие для накопительного барабана 4. Данные 42 получаются в перемножающем устройстве 41 из сигнала 39 скорости приводного колеса 3, в который вносится поправка в виде коэффициента 40 скорости. Коэффициент 40 зависит от состояния накопительного барабана 4 и слоя на барабане. К указанной информации скорости в суммирующем устройстве 43 добавляется допуск 45 на скорость в виде сигнала 25. Это дает верхнюю границу 30 области команд задания скорости. Соответствующим образом в вычитающем устройстве 44 из данных 42 скорости производится вычитание допуска 45 на скорость, что дает нижнюю границу 29 области команд задания скорости. Если трос проскальзывает и достигается граница области команд задания скорости, происходит увеличение крутящего момента на накопительном барабане 4, чтобы трос далее не проскальзывал.
Следует понимать, что вышеприведенное описание и прилагаемые чертежи предназначены только для иллюстрации настоящего изобретения. Для специалистов в данной области будет понятно, что в форму и детали осуществления изобретения могут быть внесены изменения, не выходящие за границы идеи и объема изобретения, которые определяются пунктами прилагаемой формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЭЛЕКТРИЧЕСКОГО УПРАВЛЕНИЯ ПОДЪЕМНЫМ КРАНОМ С МНОЖЕСТВОМ ТОЧЕК ПОДВЕСА | 2007 |
|
RU2445250C2 |
| СПОСОБ РАБОТЫ ГРУЗОВОЙ ТЯГОВОЙ ЛЕБЕДКИ И ГРУЗОВАЯ ТЯГОВАЯ ЛЕБЕДКА | 2016 |
|
RU2630266C1 |
| ПРИБОР И МЕТОД КОНТРОЛЯ ДИНАМИЧЕСКИХ НАПРЯЖЕНИЙ В МНОГОСЛОЙНОМ ВИТОМ ТРОСЕ И БАРАБАНЕ В СВЕРХГЛУБОКОЙ СКВАЖИНЕ | 2016 |
|
RU2692968C1 |
| ДВУХБАЛОЧНЫЙ ПОДЪЕМНЫЙ КРАН С МНОЖЕСТВОМ ТОЧЕК ПОДВЕСА | 2007 |
|
RU2442743C2 |
| ПОДЪЕМНОЕ УСТРОЙСТВО | 2024 |
|
RU2835700C1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ ПОДЪЕМНОГО УСТРОЙСТВА И ПОДЪЕМНАЯ СИСТЕМА | 2007 |
|
RU2429185C2 |
| ПОДЪЕМНЫЙ КРАН И СПОСОБ ЕГО ЭКСПЛУАТАЦИИ | 2017 |
|
RU2743304C2 |
| ВЗЛЕТНО-ПОСАДОЧНЫЙ КОМПЛЕКС С УНИВЕРСАЛЬНЫМ СИЛОВЫМ УСТРОЙСТВОМ | 2012 |
|
RU2497714C2 |
| Ограничитель грузоподъемности грузоподъемного устройства | 1976 |
|
SU640961A1 |
| Исполнительный механизм подачи бурового инструмента | 1986 |
|
SU1384734A2 |


Изобретение относится к способу управления подъемным краном. При работе крана управляют участком троса (13), соединенного с крюком крана посредством фрикционного приводного колеса, наматывают лишний трос в несколько слоев на накопительный барабан с использованием двух механизмов. Первый механизм предназначен для приводного колеса. Второй механизм предназначен для накопительного барабана. Одним из механизмов управляют посредством команд задания скорости, другим механизмом управляют посредством команд задания крутящего момента. Изобретение позволяет увеличить эксплуатационный срок службы троса. 8 з.п. ф-лы, 4 ил.
1. Способ управления краном, в котором управляют участком (13) троса, соединенным с крюком крана, посредством фрикционного приводного колеса (3), и наматывают лишний трос (12) в несколько слоев на накопительный барабан (4), с использованием двух механизмов (1, 2), первый (1) из которых предназначен для приводного колеса (3), а второй (2) предназначен для накопительного барабана (4), отличающийся тем, что одним из механизмов (1, 2) управляют посредством команд задания скорости, а другим механизмом (1, 2) управляют посредством команд задания крутящего момента.
2. Способ по п.1, отличающийся тем, что механизмом (1), вращающим приводное колесо (3), управляют посредством команд задания скорости, а механизмом (2), вращающим накопительный барабан (4), управляют посредством команд задания крутящего момента.
3. Способ по п.1, отличающийся тем, что механизмом (1), вращающим приводное колесо (3), управляют посредством команд задания крутящего момента, а механизмом (2), вращающим накопительный барабан (4), управляют посредством команд задания скорости.
4. Способ по п.1, отличающийся тем, что управление краном осуществляют посредством общего компьютера (11), который выполнен с возможностью управления обоими механизмами (1, 2) и управления их взаимозависимой работой.
5. Способ по п.1, отличающийся тем, что управление краном осуществляют посредством общего компьютера (11), который выполнен с возможностью одновременного управления электрическими приводами (9, 10) одного или обоих механизмов (1, 2).
6. Способ по п.1, отличающийся тем, что сохраняют таблицу соответствия высотам подъема в памяти управляющего компьютера (11) и посредством указанной таблицы корректируют крутящий момент накопительного барабана (4) таким образом, чтобы на тросе поддерживалось постоянное усилие.
7. Способ по п.4, отличающийся тем, что формируют таблицу, контролирующую слои намотки троса в соответствии с высотой подъема, автоматическим образом посредством обучающей программы, хранящейся в памяти компьютера (11).
8. Способ по п.1, отличающийся тем, что парируют проскальзывание троса на приводном колесе (3) путем увеличения крутящего момента накопительного барабана (4), если скорость выходит за пределы границ области скоростей.
9. Способ по п.1, отличающийся тем, что обеспечивают посредством шкива (8) и приводного колеса (3) контакт троса с колесом (3) в пределах угла 270-540°.
| DE 19903094 A1, 27.01.1999 | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для оценки технического состояния цилиндропоршневой группы карбюраторного двигателя внутреннего сгорания | 1984 |
|
SU1224647A1 |
| ЛЕБЕДКА ДЛЯ КАРОТАЖНО-ПЕРФОРАТОРНЫХ ПОДЪЕМНИКОВ | 0 |
|
SU367043A1 |

