Область техники
Изобретение относится к области авиации, более конкретно к приборному оборудованию, и может быть использовано для определения скорости захода на посадку по параметрам полета, без использования данных о фактическом весе самолета.
Уровень техники.
В настоящее время скорость захода на посадку, которую должен выдерживать экипаж, определяется по графикам и/или таблицам, помещенным в инструкции летчику (РЛЭ - Руководстве по Летной Эксплуатации), в зависимости от текущего веса и конфигурации самолета. Недостаток ручного способа определения расчетной скорости захода на посадку заключаются в его трудоемкости.
Этот расчет может быть автоматизирован.
Недостаток этого и указанного выше способа определения расчетной скорости захода на посадку заключается в том, что необходимо точно знать текущий вес самолета, что не всегда удается сделать в практической эксплуатации. Не всегда точно известен вес груза и пассажиров. Вес ребенка и взрослого пассажира, например, принимаются равными. Необходимо точно учитывать вес сбрасываемых подвесок, большое разнообразие которых значительно затрудняет решение задачи.
Известно, что существуют системы измерения массы и центровки, позволяющие определить вес самолета на земле путем измерения давления в амортизаторах шасси. Недостатки этого способа заключаются в том, что на стоянке достаточная точность измерений не обеспечивается из-за непостоянства трения покоя. Этот недостаток преодолевают, проводя измерения во время руления. Но и в этом случае, как и в предыдущем, измерения производятся задолго до захода на посадку и отмеченные выше недостатки не устраняются.
Сущность изобретения.
Задачей изобретения является создание такого способа определения скорости захода на посадку, который обеспечивал бы определение скорости захода на посадку в полете без использования данных о фактическом весе самолета.
Поставленная задача решается за счет того, что при определении скорости захода самолета на посадку по параметрам полета измеряют скорость полета, угол атаки и вертикальную перегрузку, затем измеренные значения «сглаживают», по «сглаженным» значениям скорости полета Vf, угла атаки αf, вертикальной перегрузки nyf и определенным заранее значениям вертикальной перегрузки захода на посадку  коэффициента подъемной силы захода на посадку
коэффициента подъемной силы захода на посадку  фактического коэффициента подъемной силы Cyf, определяемого по формульной или табличной зависимости от угла атаки αf, определяют скорость захода на посадку Vap по формуле:
фактического коэффициента подъемной силы Cyf, определяемого по формульной или табличной зависимости от угла атаки αf, определяют скорость захода на посадку Vap по формуле:

и выдерживают полученное значение скорости захода на посадку в процессе снижения по глиссаде путем изменения тяги двигателей.
При этом «сглаживание» измеряемых параметров в предпочтительном варианте исполнения изобретения производят методом «скользящего среднего».
Технический результат, на достижение которого направлено заявленное изобретение, состоит в упрощении управления самолетом и увеличении точности и надежности определения скорости захода на посадку по параметрам полета, без использования данных о фактическом весе самолета.
Упрощение управления самолетом заключается в том, что экипаж освобождается от трудоемких ручных расчетов, которые могут быть и ошибочными. Увеличение надежности и точности достигается тем, что исключаются ручные расчеты, а в автоматическом расчете значительно сокращается количество датчиков: вместо многочисленных, ограниченно надежных датчиков остатков топлива в каждом баке, наличия и типа (веса) подвесок, в полете измеряют 3 параметра.
Для достижения указанного технического результата в полете производят измерение скорости полета, угла атаки, вертикальной перегрузки.
Отличительные признаки предлагаемого способа заключаются в том, что измеряемые значения «сглаживают» По «сглаженным» значениям скорости полета Vf, угла атаки αf, вертикальной перегрузки nyf и определенным заранее значениям вертикальной перегрузки захода на посадку  , коэффициента подъемной силы захода на посадку
, коэффициента подъемной силы захода на посадку  , фактического коэффициента подъемной силы Cyf, определяемого по формульной или табличной зависимости от угла атаки αf, определяют скорость захода на посадку Vap по формуле:
, фактического коэффициента подъемной силы Cyf, определяемого по формульной или табличной зависимости от угла атаки αf, определяют скорость захода на посадку Vap по формуле:
Указанные выше измеряемые значения «сглаживают» методом «скользящего среднего» или другим способом.
Благодаря этим признакам обеспечивается определение скорости захода на посадку в полете без использования данных о фактическом весе самолета.
Предлагаемый способ определения скорости захода на посадку иллюстрируется чертежом, представленным на фиг.1.
На фиг.1 показана типичная зависимость коэффициента подъемной силы самолета Су от угла атаки в посадочной конфигурации.
На фиг.1 обозначено:
1. Угол атаки, при котором подъемная сила равна нулю α0
2. Коэффициент подъемной силы при нулевом угле атаки.
3. Расчетный угол атаки захода на посадку.
4. Расчетный коэффициент подъемной силы захода на посадку  .
.
Осуществление изобретения
Способ определения скорости захода на посадку по параметрам полета реализуется следующим образом.
В полете производят измерение скорости полета, угла атаки, вертикальной перегрузки. Значение вертикальной перегрузки захода на посадку  определяют по формуле:
определяют по формуле:

где θgs - угол наклона расчетной глиссады снижения.
Коэффициент подъемной силы  при заходе на посадку определяют при аэродинамическом расчете самолета для всех возможных положений механизации крыла и уточняют по результатам летных испытаний.
при заходе на посадку определяют при аэродинамическом расчете самолета для всех возможных положений механизации крыла и уточняют по результатам летных испытаний.
Фактический коэффициент подъемной силы Cyf определяют по формульной или табличной зависимости от угла атаки αf. Типичная зависимость коэффициента подъемной силы самолета Су от угла атаки в посадочной конфигурации показана на фиг.1. Если эта зависимость носит линейный характер, что характерно для прямого крыла, то ее можно представить в форме:

где  - производная коэффициента подъемной силы по углу атаки;
- производная коэффициента подъемной силы по углу атаки;
α0 - угол атаки, при котором подъемная сила равна нулю.
У стреловидных крыльев эта зависимость, начиная с некоторого угла атаки, носит нелинейных характер. В этом случае указанную зависимость задают в виде таблицы. Или на нелинейном участке выделяют интервалы, на которых можно считать производную постоянной, и определяют Cyf методом кусочно-линейного интегрирования. Можно также представить зависимость Cyf=f(αf) в виде полинома некоторой степени.
Затем определяют скорость захода на посадку по формуле:

Полученное значение выдают экипажу самолета (летчику) на индикацию. Экипаж вводит это значение в автомат тяги путем перемещения (посредством штатного задатчика) индекса заданной скорости на указателе скорости полета. Значение расчетной скорости может быть введено в автомат тяги непосредственно из вычислителя.
Если автомата тяги нет, то летчик устанавливает расчетное значение путем перемещения индекса заданной скорости на указателе скорости полета.
При отсутствии на указателе скорости специального индекса экипаж (летчик) вручную выдерживает расчетную скорость захода на посадку путем перемещения РУД (Рычагов Управления Двигателями).
Метод «скользящего среднего» заключается в следующем.
Сумму измеренных в определенные моменты времени значений параметра делят на количество выполненных измерений на заданном интервале времени. Каждое новое последующее значение прибавляют к имеющейся сумме, последнее старое значение отбрасывают. Количество измерений остается постоянным. Среднее значение параметра на интервале, таким образом, как бы скользит по шкале времени.
Сигналы датчика угла атаки, например, сглаживают этим методом следующим образом.
Предположим, сглаживают 5 последовательных измерений, значения которых следующие:
α1=6,4°; α2=6,1°; α3=5,9°; α4=6,7° α5=6,6°.
Вычисляют среднее значение:

В следующий момент времени получают новое значение α6=7,5
Вычисляют новое среднее значение, отбрасывая из суммы в числителе последнее старое значение, и прибавляют новое значение:

В следующий момент времени получают новое значение α7=7,9. Снова среднее значение… И т.д.
В вычислителе таким способом осредняют (сглаживают) не 5 значений, а несколько сотен.
Проведенное моделирование на трех пилотажных стендах показало возможность достоверного определения скорости захода на посадку по параметрам полета в горизонтальном полете, при разворотах с переменной скоростью и при выполнении фигур сложного пилотажа, включая петли Нестерова и бочки. Для посадочной скорости это не важно, это просто демонстрация работы алгоритма в наиболее сложных условиях полета.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2013 |
|
RU2541902C2 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2015 |
|
RU2598130C1 |
| СПОСОБ УЛУЧШЕНИЯ МАНЕВРЕННЫХ ХАРАКТЕРИСТИК ЛЕТАТЕЛЬНОГО АППАРАТА В ПРОЦЕССЕ ОСУЩЕСТВЛЕНИЯ ЗАКЛЮЧИТЕЛЬНОЙ ФАЗЫ ЗАХОДА НА ПОСАДКУ ПЕРЕД ПРИЗЕМЛЕНИЕМ И ПОСЛЕДУЮЩЕГО ВЫРАВНИВАНИЯ (ВАРИАНТЫ) | 2005 |
|
RU2384874C2 |
| СПОСОБ ФОРМИРОВАНИЯ ПРОГНОЗА ВЕКТОРА СКОРОСТИ ПОЛЕТА | 2010 |
|
RU2466911C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ВОЗДУШНЫХ СУДОВ | 2011 |
|
RU2460982C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СИСТЕМОЙ ОБЕСПЕЧЕНИЯ БОЛЬШОЙ ПОДЪЕМНОЙ СИЛЫ САМОЛЕТА | 2008 |
|
RU2478520C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ НАБЕГАЮЩЕГО ПОТОКА ЛЕТАТЕЛЬНОГО АППАРАТА В ПОЛЕТЕ НА РЕЖИМАХ ПЛАНИРОВАНИЯ С ГИПЕРЗВУКОВЫМИ ИЛИ ДОЗВУКОВЫМИ СКОРОСТЯМИ ДВИЖЕНИЯ | 1998 |
|
RU2135974C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ УГРОЗЫ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С ПРЕПЯТСТВИЯМИ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 2007 |
|
RU2356099C1 |
| БОРТОВАЯ ИНТЕГРИРОВАННАЯ СИСТЕМА ИНФОРМАЦИОННОЙ ПОДДЕРЖКИ ЭКИПАЖА И КОГНИТИВНЫЙ ФОРМАТ ПРЕДСТАВЛЕНИЯ ПОЛЕТНОЙ ИНФОРМАЦИИ НА ЭТАПЕ "ВЗЛЕТ" МНОГОДВИГАТЕЛЬНОГО ВОЗДУШНОГО СУДНА | 2013 |
|
RU2550887C2 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТНЫМ ЭКСПЕРИМЕНТОМ | 2012 |
|
RU2477521C1 |
Изобретение относится к области авиации, более конкретно к приборному оборудованию, и может быть использовано для определения скорости захода на посадку по параметрам полета, без использования данных о фактическом весе самолета. Для упрощения управления самолетом и увеличения точности определения скорости захода на посадку по параметрам полета без использования данных о фактическом весе самолета измеряют скорость полета, угол атаки и вертикальную перегрузку, затем измеренные значения «сглаживают», по «сглаженным» значениям скорости полета, угла атаки, вертикальной перегрузки и определенным заранее значениям вертикальной перегрузки захода на посадку, коэффициента подъемной силы захода на посадку, фактического коэффициента подъемной силы, определяемого по формульной или табличной зависимости от угла атаки, определяют скорость захода на посадку по приведенной зависимости. Техническим результатом является упрощение управления самолетом и увеличение точности и надежности определения скорости захода на посадку по параметрам полета, без использования данных о фактическом весе самолета. 1 з.п. ф-лы, 1 ил.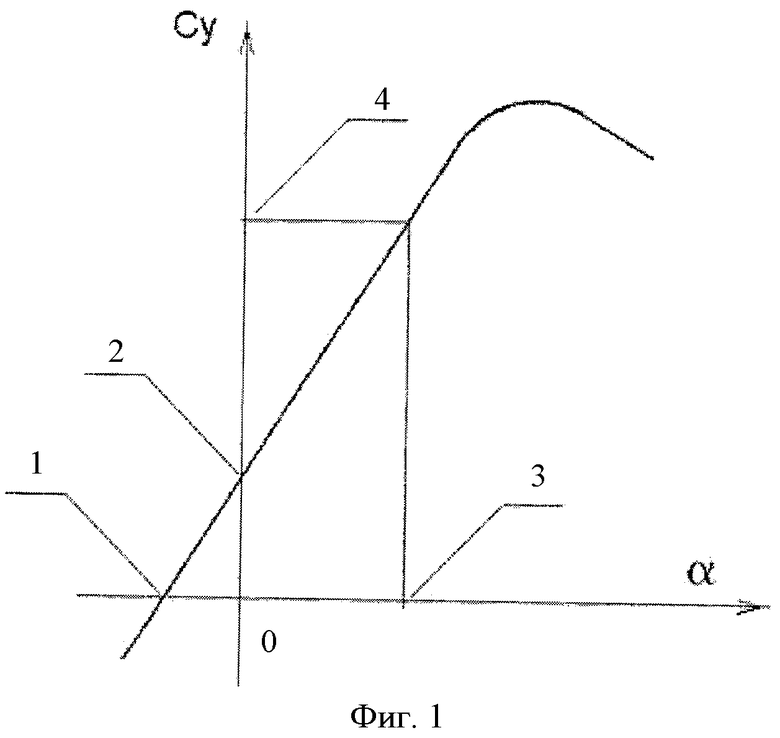
1. Способ определения скорости захода самолета на посадку по параметрам полета, включающий измерение скорости полета, угла атаки, вертикальной перегрузки, отличающийся тем, что указанные измеренные значения «сглаживают», по «сглаженным» значениям скорости полета vf, угла атаки αf, вертикальной перегрузки nyf и определенным заранее значениям вертикальной перегрузки захода на посадку  коэффициента подъемной силы захода на посадку
коэффициента подъемной силы захода на посадку  фактического коэффициента подъемной силы Cyf, определяемого по формульной или табличной зависимости от угла атаки αf, определяют скорость захода на посадку Vap по формуле:
фактического коэффициента подъемной силы Cyf, определяемого по формульной или табличной зависимости от угла атаки αf, определяют скорость захода на посадку Vap по формуле:
и выдерживают полученное значение скорости захода на посадку в процессе снижения по глиссаде путем изменения тяги двигателей.
2. Способ определения скорости захода на посадку по п.1, отличающийся тем, что «сглаживание» измеряемых параметров производят методом «скользящего среднего».
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2004 |
|
RU2267747C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235042C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С РЕЛЬЕФОМ МЕСТНОСТИ И УСТРОЙСТВО НА ЕГО ОСНОВЕ | 2006 |
|
RU2301456C1 |
| СПОСОБ ПРЕДОПЕРАЦИОННОЙ ПОДГОТОВКИ БОЛЬНЫХ С ОЖИРЕНИЕМ И СОПУТСТВУЮЩИМИ ЗАБОЛЕВАНИЯМИ | 1991 |
|
RU2028101C1 |
| EP 1942351 A1, 09.07.2008. | |||

