Изобретение относится к области спутниковой навигации и геодезии и может быть использовано для оценки точности определения координат, обеспечиваемой при помощи аппаратуры, принимающей сигналы глобальных навигационных спутниковых систем (ГНСС). Патентуемый способ предназначен для независимой оценки характеристик точности аппаратуры ГНСС геодезического класса, например, при сертификации аппаратуры или ее тестировании при производстве. Результатом оценки является значение ошибки определения координат в проекции на то или иное направление (север-юг, запад-восток и т.д.).
Известны способы оценки точности определения координат, обеспечиваемой при помощи аппаратуры, принимающей сигналы ГНСС, основанные на установке приемной антенны тестируемой аппаратуры на неподвижной точке, координаты которой известны либо в общеземной геоцентрической системе координат (ОГСК), либо относительно другой неподвижной точки, называемой опорной, в которой установлена приемная антенна другой аппаратуры, принимающей сигналы ГНСС. При этом на обеих точках должен обеспечиваться прием сигналов одних и тех же навигационных космических аппаратов (НКА) количеством не менее 6-ти одновременно. Оценка точности определения координат, обеспечиваемой при помощи аппаратуры, принимающей сигналы ГНСС, производится на основе сравнения результатов определения координат, полученных при помощи тестируемой аппаратуры, с известными значениями (либо в ОГСК, либо относительно опорной точки) (RU 2093853, RU 2222781, RU 2314553, WO 00/16120).
Недостатком известных методов является неподвижность антенны тестируемой аппаратуры, что ограничивает возможности оценки точности определения координат в различных условиях.
Задачей изобретения является обеспечение перемещения антенны тестируемой аппаратуры на известные расстояния, в известных направлениях, что позволяет более надежно оценивать точность определения координат в различных условиях.
Поставленная задача достигается за счет того, что в способе оценки точности определения координат, обеспечиваемой при помощи аппаратуры, принимающей сигналы ГНСС, устанавливают приемную антенну тестируемой аппаратуры на подвижном механизме, обеспечивающем перемещение антенны тестируемой аппаратуры в горизонтальной плоскости и в вертикальном направлении либо в любом другом направлении, одновременно с этим обеспечивают функционирование приемной аппаратуры ГНСС на одной или нескольких опорных точках, производят набор спутниковых измерений в течение заданного времени на тестируемой аппаратуре и на приемной аппаратуре ГНСС, установленной на указанных опорных точках, причем обеспечивают прием сигналов одних и тех же навигационных космических аппаратов (НКА) одновременно, по истечении заданного интервала времени антенну тестируемой аппаратуры перемещают на заданное расстояние в заданном направлении при помощи указанного подвижного механизма и производят следующий сеанс одновременного набора спутниковых измерений в течение заданного времени как на тестируемой аппаратуре, так и на приемной аппаратуре ГНСС, установленной на указанных опорных точках, после выполнения установленного количества измерительных сеансов результаты измерений, полученных при помощи тестируемой аппаратуры при разных положениях антенны, и результаты измерений, полученных на указанных опорных точках, обрабатывают, а точность определения координат, обеспечиваемую при помощи тестируемой аппаратуры, оценивают путем вычисления величин перемещения антенны тестируемой аппаратуры по результатам обработки измерительной информации и сравнения этих величин со значениями перемещений, задававшимися при тестировании с помощью подвижного механизма.
Частными существенными признаками являются:
- подвижный механизм, обеспечивающий перемещение антенны тестируемой аппаратуры в диапазоне от 0,01 м и более в горизонтальной плоскости (например, в направлениях «Север-Юг» и «Запад-Восток») или в вертикальной плоскости;
- точность перемещения антенны тестируемой аппаратуры, составляющая не хуже 0,001 м;
- количество НКА, выбранное не менее 4-х;
- опорные точки, располагающиеся на различных расстояниях относительно подвижного механизма, обеспечивающие возможность приема антеннами опорной точки и подвижного механизма сигналов НКА, являющимися для этих антенн общими.
На фиг.1 изображена структурная схема системы, реализующей способ.
Система содержит навигационные космические аппараты (НКА) (1), антенну тестируемой аппаратуры (2), подвижное устройство, обеспечивающее перемещение в заданных диапазонах с заданными точностями (3), одну или несколько опорных точек (4).
Способ оценки точности позиционирования реализуется следующим образом.
Антенна тестируемой аппаратуры (2) устанавливается в некоторое начальное положение на подвижном устройстве (3). Одновременно с этим обеспечивается функционирование приемной аппаратуры ГНСС на одной или нескольких опорных точках (4). Далее производится набор спутниковых измерений в течение некоторого времени (от нескольких секунд до нескольких суток) как на тестируемой аппаратуре, так и на опорных точках.
По истечении заданного интервала времени антенна тестируемой аппаратуры перемещается на заданное расстояние в заданном направлении при помощи подвижного устройства и производится следующий сеанс одновременного набора спутниковых измерений в течение некоторого времени как на тестируемой аппаратуре, так и на опорных точках.
По истечении заданного интервала времени антенна тестируемой аппаратуры снова перемещается на заданное расстояние в заданном направлении при помощи подвижного устройства и организуется следующий сеанс сбора данных аналогично описанному выше.
При выполнении некоторого количества измерительных сеансов измерения, полученные при помощи тестируемой аппаратуры при разных положениях антенны, и измерения, полученные на опорных точках, обрабатываются с целью оценки величин перемещения антенны тестируемой аппаратуры и сравнения этих величин со значениями перемещений, задававшимися при тестировании.
Изобретение позволяет более надежно оценивать точность определения координат в различных условиях.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗОНДИРОВАНИЯ ИОНОСФЕРЫ, ТРОПОСФЕРЫ, ГЕОДВИЖЕНИЙ И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2502080C2 |
| СПОСОБ ПОСТРОЕНИЯ ФУНКЦИОНАЛЬНОГО ДОПОЛНЕНИЯ ОРБИТАЛЬНОГО БАЗИРОВАНИЯ К ГЛОБАЛЬНОЙ НАВИГАЦИОННОЙ СПУТНИКОВОЙ СИСТЕМЕ | 2008 |
|
RU2367910C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ-ПОТРЕБИТЕЛЕЙ НАВИГАЦИОННОЙ ИНФОРМАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2402786C1 |
| УСТРОЙСТВО ИНСТРУМЕНТАЛЬНОГО КОНТРОЛЯ СИГНАЛОВ РАДИОНАВИГАЦИОННОГО ПОЛЯ ИМПУЛЬСНО-ФАЗОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 2019 |
|
RU2745961C2 |
| СПОСОБ ПОВЫШЕНИЯ ПОМЕХОУСТОЙЧИВОСТИ ИНТЕГРИРОВАННОЙ СИСТЕМЫ ОРИЕНТАЦИИ И НАВИГАЦИИ | 2011 |
|
RU2498335C2 |
| Способ определения местоположения абонентских терминалов, перемещающихся в зоне покрытия локальной системы навигации | 2023 |
|
RU2825248C1 |
| АЛЬТИМЕТРИЧЕСКИЙ СПОСОБ ВЫПОЛНЕНИЯ МОРСКОЙ ВЫСОТОМЕТРИИ С ОПРЕДЕЛЕНИЕМ УКЛОНЕНИЯ ОТВЕСНОЙ ЛИНИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2727584C1 |
| СПОСОБ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТА | 2015 |
|
RU2580827C1 |
| Компенсатор помех для навигационной аппаратуры потребителя глобальной навигационной спутниковой системы | 2017 |
|
RU2660140C1 |
| Устройство для пространственной селекции сигналов навигационных космических аппаратов с использованием пеленгования источников радиопомех | 2016 |
|
RU2619800C1 |
Изобретение относится к области радиотехники, а именно к спутниковой навигации, и может быть использовано для тестирования навигационной аппаратуры. Технический результат заключается в повышении надежности оценки точности определения координат в различных условиях. Для этого устанавливают приемную антенну тестируемой аппаратуры на подвижный механизм, позволяющий перемещать указанную антенну в различных направлениях, обеспечивают функционирование приемной аппаратуры ГНСС в по меньшей мере одной опорной точке, обеспечивают одновременный прием сигналов одних и тех же спутников и производят в течение заданного времени сеанс одновременного набора спутниковых измерений на тестируемой аппаратуре и на приемной аппаратуре ГНСС, после чего с помощью подвижного механизма перемещают в заданном направлении и на заданное расстояние антенну тестируемой аппаратуры и проводят новый сеанс набора спутниковых измерений; описанные действия проводят требуемое число раз. После выполнения установленного количества измерительных сеансов все полученные результаты измерений обрабатывают, причем точность измерения оценивают как разницу величин перемещений антенны тестируемой аппаратуры и перемещений, задаваемых при тестировании с помощью подвижного механизма. 3 з.п. ф-лы, 1 ил.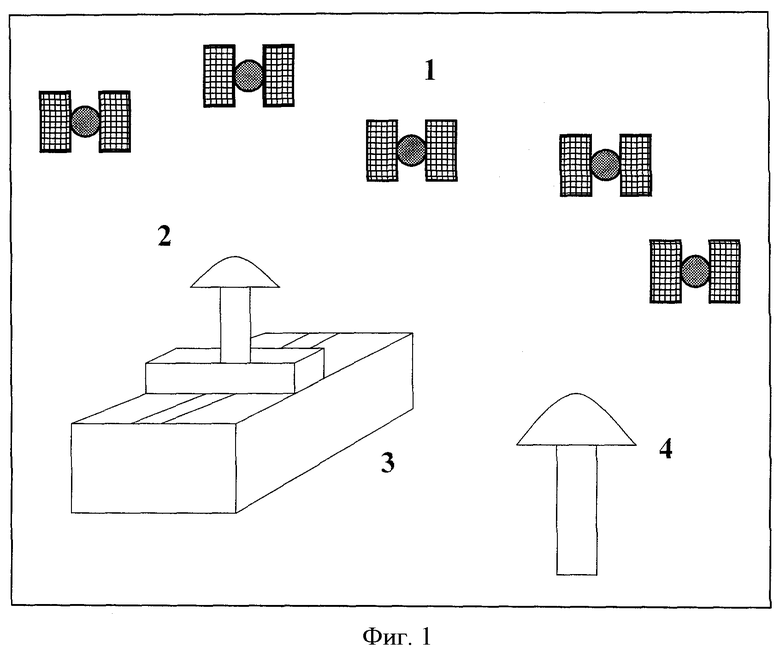
1. Способ оценки точности определения координат, обеспечиваемой при помощи аппаратуры, принимающей сигналы ГНСС, при котором устанавливают приемную антенну тестируемой аппаратуры на подвижном механизме, обеспечивающем перемещение антенны тестируемой аппаратуры в горизонтальной плоскости и в вертикальном направлении либо в любом другом направлении, одновременно с этим обеспечивают функционирование приемной аппаратуры ГНСС на одной или нескольких опорных точках, производят набор спутниковых измерений в течение заданного времени на тестируемой аппаратуре и на приемной аппаратуре ГНСС, установленной на указанных опорных точках, причем обеспечивают прием сигналов одних и тех же навигационных космических аппаратов (НКА) одновременно, по истечении заданного интервала времени антенну тестируемой аппаратуры перемещают на заданное расстояние в заданном направлении при помощи указанного подвижного механизма и производят следующий сеанс одновременного набора спутниковых измерений в течение заданного времени как на тестируемой аппаратуре, так и на приемной аппаратуре ГНСС, установленной на указанных опорных точках, после выполнения установленного количества измерительных сеансов результаты измерений, полученных при помощи тестируемой аппаратуры при разных положениях антенны, и результаты измерений, полученных на указанных опорных точках, обрабатывают, а точность определения координат, обеспечиваемую при помощи тестируемой аппаратуры, оценивают путем вычисления величин перемещения антенны тестируемой аппаратуры по результатам обработки измерительной информации и сравнения этих величин со значениями перемещений, задаваемыми при тестировании с помощью подвижного механизма.
2. Способ по п.1, отличающийся тем, что подвижный механизм обеспечивает перемещение антенны тестируемой аппаратуры в горизонтальной плоскости в направлении «Север-Юг» с точностью не ниже 0,001 м в диапазоне от 0,01 м и более; перемещение антенны тестируемой аппаратуры в горизонтальной плоскости в направлении «Запад-Восток» с точностью не ниже 0,001 м в диапазоне от 0,01 м и более и перемещение антенны тестируемой аппаратуры в вертикальном направлении с точностью не ниже 0,001 м в диапазоне от 0,01 м и более.
3. Способ по п.1 или 2, отличающийся тем, что количество НКА выбрано не менее 4-х.
4. Способ по п.1, или 2, или 3, отличающийся тем, что опорные точки располагают на различных расстояниях относительно подвижного механизма, обеспечивающих возможность приема антеннами опорной точки и подвижного механизма сигналов НКА, являющимися для этих антенн общими.

