Данное изобретение относится к способу манипулирования и роботу, используемому для осуществления способа, а более конкретно к способу манипулирования и роботу, используемому для осуществления этого способа, когда заготовки, которые сложены в стопу на поддоне, загружают по одной в обрабатывающую машину, например пресс или листоштамповочный пресс, или в упаковочную машину, например машину для скрепления, или когда заготовки укладывают в стопу одну за другой на поддоне стопы.
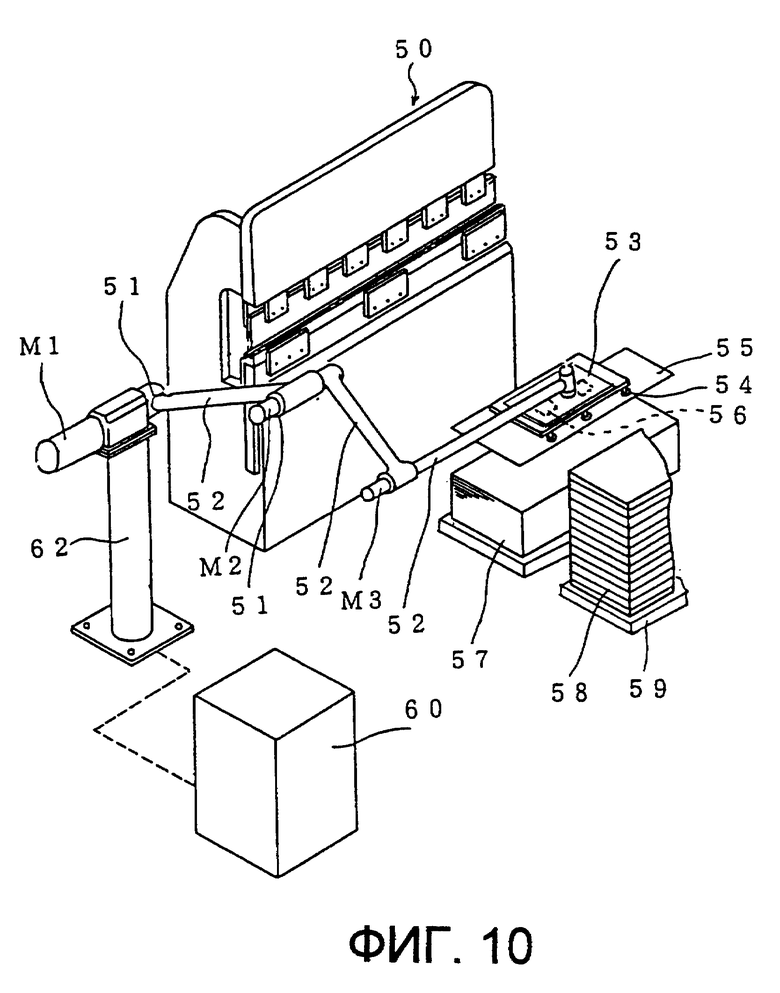
Обычно, как показано на фиг. 10, робот этого типа расположен на периферии обрабатывающей машины 50 и снабжен множеством звеньев 52 руки робота, которые соединены с помощью множества сочленений 51. Кисть 53 руки робота, установленную на крайнем спереди звене 52 руки робота, регулируют для отслеживания множества точек, которые установлены заранее. Кисть 53 руки робота снабжена захватным элементом, например вакуумной присоской 54, и датчиком 56, который обнаруживает заготовку 55, вступающую в контакт с вакуумной присоской 54, когда заготовку 55 опускают. Чтобы загрузить заготовку 55 в обрабатывающую машину 50, осуществляют операцию поиска заготовки, во время которого кисть 53 руки робота сначала смещают в положение, которое находится на заранее определенном расстоянии как раз над заготовками 55, сложенными в стопу на поддоне 57 стопы. Затем кисть 53 руки робота медленно опускают до тех пор, пока датчик 56 не обнаружит, что вакуумная присоска 54 вступает в контакт с заготовкой 55, а затем прекращают опускание кисти 53 руки робота. По завершении операции опускания звена 52 руки робота после обнаружения заготовки 55 проводят следующую операцию, например передачу заготовки 55 на обрабатывающую машину 50. С другой стороны, в случае, когда одну заготовку 58 после механической обработки нужно уложить на другую в стопу на поддоне 59 готовой продукции, вышеупомянутую операцию осуществляют точно также, но в обратном порядке. А именно, датчик обнаруживает заготовку 58, захваченную вакуумной присоской 54, вступающую в контакт с поддоном 59 стопы готовой продукции, и снимает или ослабляет усилие присасывания вакуумной присоски 54, позволяя таким образом вакуумной присоске 54 перейти к передаче следующей заготовки 58 на поддон 59 стопы изделий. На фиг.10 позицией 60 обозначен пульт управления.
При вышеупомянутом способе звено 52 медленно опускают из самого высокого положения, которое находится выше самой верхней уложенной в стопу заготовки. Поэтому в случае, когда количество заготовок 55, 58, которые уложены в стопу на поддоне 57, 59, мало, происходит потеря времени и продлевается время цикла.
Известен способ манипулирования кистью руки робота, захватывающей заготовку, при ее подводе к поддону стопы или заготовкам, уложенным в стопу на поддоне, для их захвата или укладки в стопу, включающий установку кисти руки робота на заранее определенном расстоянии над поддоном стопы, подвод кисти к стопе заготовок, останов кисти и захват заготовки или освобождение захваченной заготовки (SU 1461614 A1, 28.02.89, B 21 D 43/00) /1/.
Известен манипуляционный робот для захвата и передачи в некоторый момент времени одного листа или одной заготовки с поддона или на поддон, содержащий кисть руки робота для захвата заготовки, звенья руки робота для удержания кисти и механизм подъема и опускания звена руки робота /1/.
Недостатком указанных известных способа манипулирования и манипуляционного робота является значительная потеря времени при перемещении кисти руки робота и заготовки.
Технической задачей, на решение которой направлены изобретения, является сокращение времени цикла.
Поставленная задача решается следующим образом.
Способ манипулирования, соответствующий настоящему изобретению, является способом подвода кисти руки робота, захватывающей заготовку, к поддону стопы и заготовкам, сложенным в стопу на поддоне, чтобы захватывать или укладывать заготовки в стопу, и включает:
а) этап установки кисти руки робота на заранее определенном расстоянии над поддоном стопы,
б) этап обеспечения подвода кисти руки робота с высокой скоростью в положение начала торможения на заранее определенном расстоянии, превышающем высоту стопы заготовок, значение которой хранится в памяти,
в) этап осуществления подвода кисти руки робота с низкой скоростью к высоте заготовок, значение которой хранится в памяти, из положения начала торможения,
г) этап останова кисти руки робота на высоте стопы заготовок, значение которой хранится в памяти, и захвата заготовки или высвобождения захваченной заготовки.
Дополнительный режим способа манипулирования, соответствующего настоящему изобретению, включает:
а) этап поиска заготовки, предусматривающий установку кисти руки робота в положение на заранее определенном расстоянии над поддоном стопы и обеспечение подвода кисти руки робота к поддону стопы с низкой скоростью до тех пор, пока не произойдет обнаружение заготовки или поддона стопы под кистью руки робота, и останов кисти руки робота, когда происходит обнаружение заготовки или поддона стопы,
б) этап запоминания обнаруженного положения высоты заготовок,
в) этап захвата, предусматривающий захват заготовок или высвобождение захваченной заготовки в положении останова кисти руки робота,
г) промежуточный этап для перехода к следующему этапу,
д) этап подвода с высокой скоростью, предусматривающий установку кисти руки робота снова в положение на заранее определенном расстоянии над поддоном стопы и обеспечение опускания кисти руки робота с высокой скоростью в положение начала торможения, расположенное выше находящегося в памяти значения высоты стопы заготовок,
е) этап подвода кисти руки с низкой скоростью, обеспечивающий ее опускание до высоты стопы заготовок, учитывая значение последней, введенное в память,
ж) этап повторного захвата, предусматривающий захват заготовки или высвобождение захваченной заготовки,
з) этап повторения вышеупомянутых этапов г) - ж).
На вышеупомянутом этапе б) данные высоты заготовок можно вычислить путем сложения значения толщины одной заготовки и данных о высоте кисти руки робота, полученных на этапе а) поиска заготовки, или вычитания значения этой толщины из этих данных о высоте. Кроме того, на этапе е) подвода с низкой скоростью, когда заготовка либо присутствует, либо ее нельзя обнаружить, в случае, если заготовка не обнаружена, сначала выполняют корректирующий расчет для прибавления или вычитания требуемого значения, а затем кисть руки робота опускают с низкой скоростью до высоты, определенной с помощью откорректированных данных. И помимо этого, на этапе е) подвода с низкой скоростью звено руки робота можно опускать до тех пор, пока не обнаружат заготовку, а коррекцию данных проводят на основании высоты загруженных заготовок в момент обнаружения заготовки.
Манипуляционный робот, соответствующий настоящему изобретению, является роботом того типа, который повторяет передачу заготовки таким образом, что за один прием одна заготовка захватывается и передается на поддон стопы или с него. Манипуляционный робот содержит кисть руки робота, которая захватывает заготовку, звенья руки робота, которые удерживают кисть руки робота, механизм подъема и опускания звена руки робота, средство определения высоты звеньев руки робота, блок регулировки, который регулирует высоты звеньев руки робота и скорость опускания, по меньшей мере, в два этапа, и средство обнаружения заготовки для определения момента вступления кисти руки робота в контакт с заготовкой. Блок регулировки включает в себя арифметический вычислительный и запоминающий блок, который вычисляет в реальном масштабе времени высоту заготовок на поддоне на основании данных, касающихся предыдущей высоты заготовки, командный блок, который, на основе полученных в реальном масштабе времени данных о высоте заготовки, опускает звено руки робота с высокой скоростью в положение, которое находится несколько выше, чем высота заготовки согласно этим данным, а потом опускает звено руки робота с низкой скоростью до тех пор, пока средство обнаружения заготовки не обнаружит заготовку. В таком роботе кисть руки робота выполнена с возможностью беспрепятственного поворота в направлениях вверх и вниз посредством звеньев руки робота. В этом случае средство обнаружения заготовки сконструировано так, чтобы обнаруживающее средство могло обнаруживать кисть руки робота в положении, поднятом относительно звена руки робота.
Согласно первому способу, соответствующему настоящему изобретению высоту заготовок запоминают в блоке регулировки и подводят звенья руки робота с высокой скоростью в положение начала торможения, которое рассчитывают на основании находящейся в памяти высоты заготовок, а подвод на остающееся расстояние осуществляют с низкой скоростью. Движение звеньев руки робота с высокой скоростью в положение начала торможения и движение звеньев руки робота с низкой скоростью в положение останова регулируют путем регулирования подачи вперед. Соответственно общее время цикла можно уменьшить.
Согласно второму способу, соответствующему настоящему изобретению, на первой операции захвата, проводимой для захвата заготовки в первый раз, кисть руки робота опускают медленно во время поиска заготовки, а именно предусмотрено регулирование подачи назад по положению заготовки и с помощью этого регулирования определяют высоту загруженной заготовки и запоминают. На последующих операциях захвата, как и в случае первого способа, осуществляется регулирование подачи вперед и таким образом можно уменьшить время цикла для осуществления этих операций захвата. При таком регулировании подачи вперед проводят расчет так, что толщина одной заготовки складывается с высотой заготовки или вычитается из нее. Если операция обнаружения наличия заготовки осуществляется на этапе е) подвода с низкой скоростью и будет выполняться корректирующий расчет для прибавления или вычитания заранее определенного значения в случае, если заготовка не обнаружена, достаточно будет провести такое регулирование подачи вперед один раз за несколько операций захвата.
Регулирование подачи вперед можно осуществлять каждый раз, чтобы каждый раз определять высоту заготовки и обновлять данные высоты. Даже в таком случае время подвода с низкой скоростью тоже можно уменьшить, так что можно уменьшить и время цикла по сравнению с обычным способом.
Для осуществления вышеупомянутого способа манипулирования предлагается робот, соответствующий настоящему изобретению. В таком роботе кисть руки робота беспрепятственно перемещается в направлениях вверх и вниз относительно звеньев руки робота и удерживается на месте. Если робот снабжен пружинами, которые отклоняют кисть руки робота в направлении вниз относительно звеньев руки робота, погрешность, которая существует в диапазоне вертикального движения кисти руки робота относительно звеньев руки робота, можно компенсировать с помощью пружин, так что при необходимости можно осуществить вышеупомянутый способ. Кроме того, если обнаружение заготовки осуществляют на основании вертикального движения кисти руки робота, можно повысить точность операции обнаружения заготовки.
На фиг. 1 изображена условная блок-схема, иллюстрирующая один конкретный вариант осуществления способа манипулирования, соответствующего настоящему изобретению.
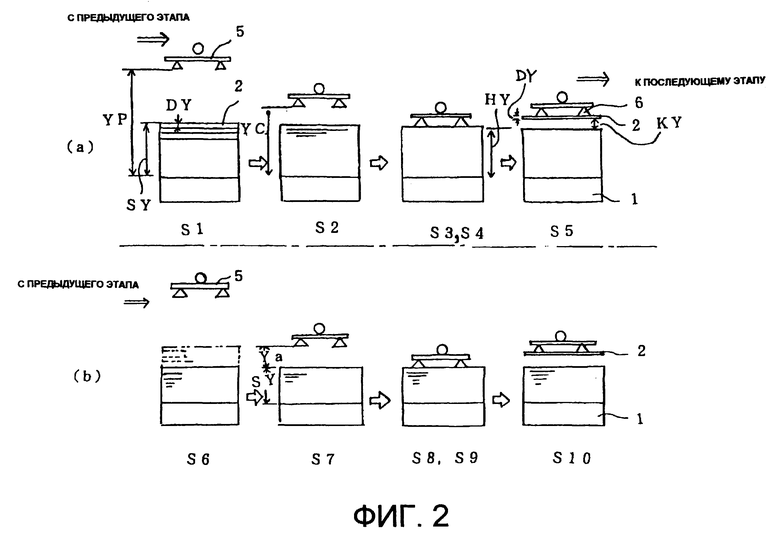
На фиг. 2a изображена принципиальная схема, иллюстрирующая этапы способа манипулирования.
На фиг. 2b изображена еще одна принципиальная схема, иллюстрирующая этапы способа манипулирования.
На фиг. 3 изображена первая часть блок-схемы, подробно иллюстрирующая способ манипулирования, изображенный на фиг. 1.
На фиг. 4 изображена вторая часть блок-схемы, подробно иллюстрирующая способ манипулирования, показанный на фиг. 1.
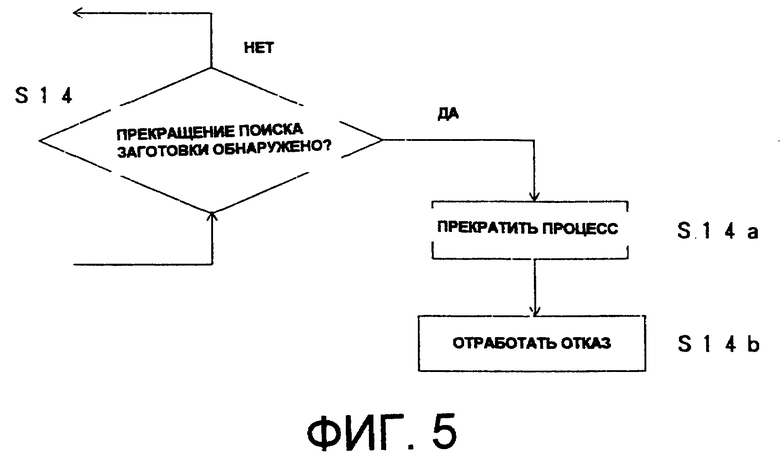
На фиг. 5 изображена частичная блок-схема, иллюстрирующая еще один конкретный вариант осуществления способа манипулирования, соответствующего настоящему изобретению.
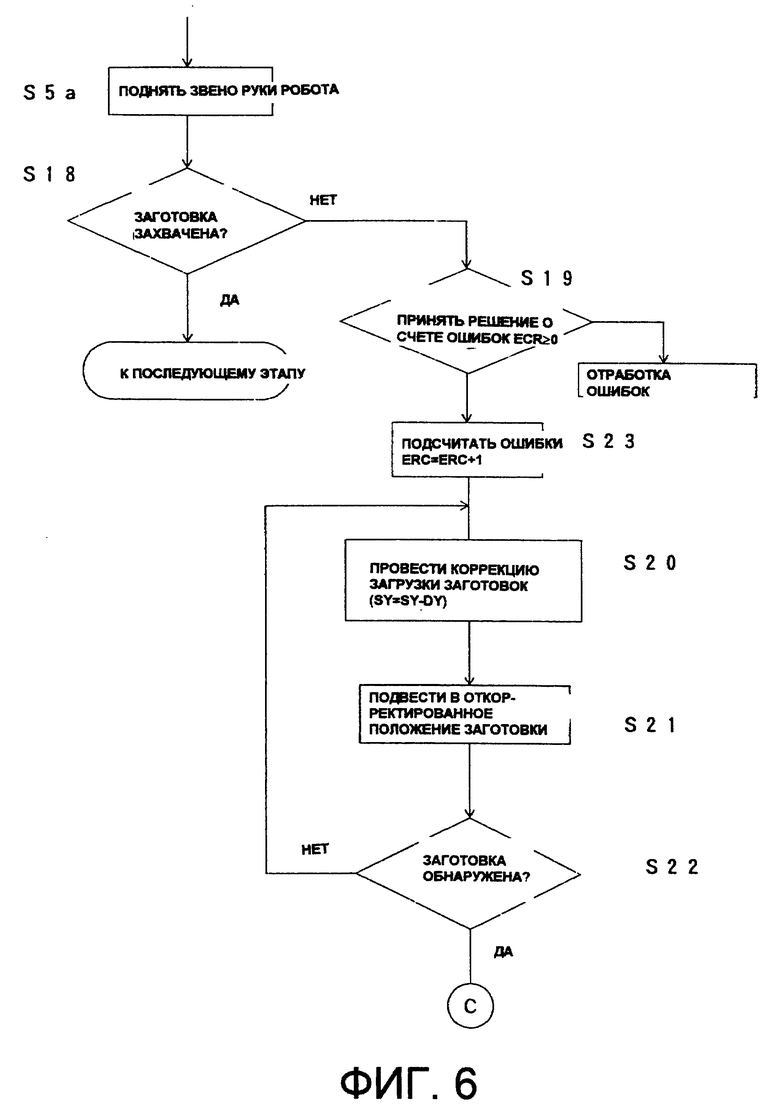
На фиг. 6 изображена условная блок-схема, иллюстрирующая одно приложение способа манипулирования, соответствующего настоящему изобретению.
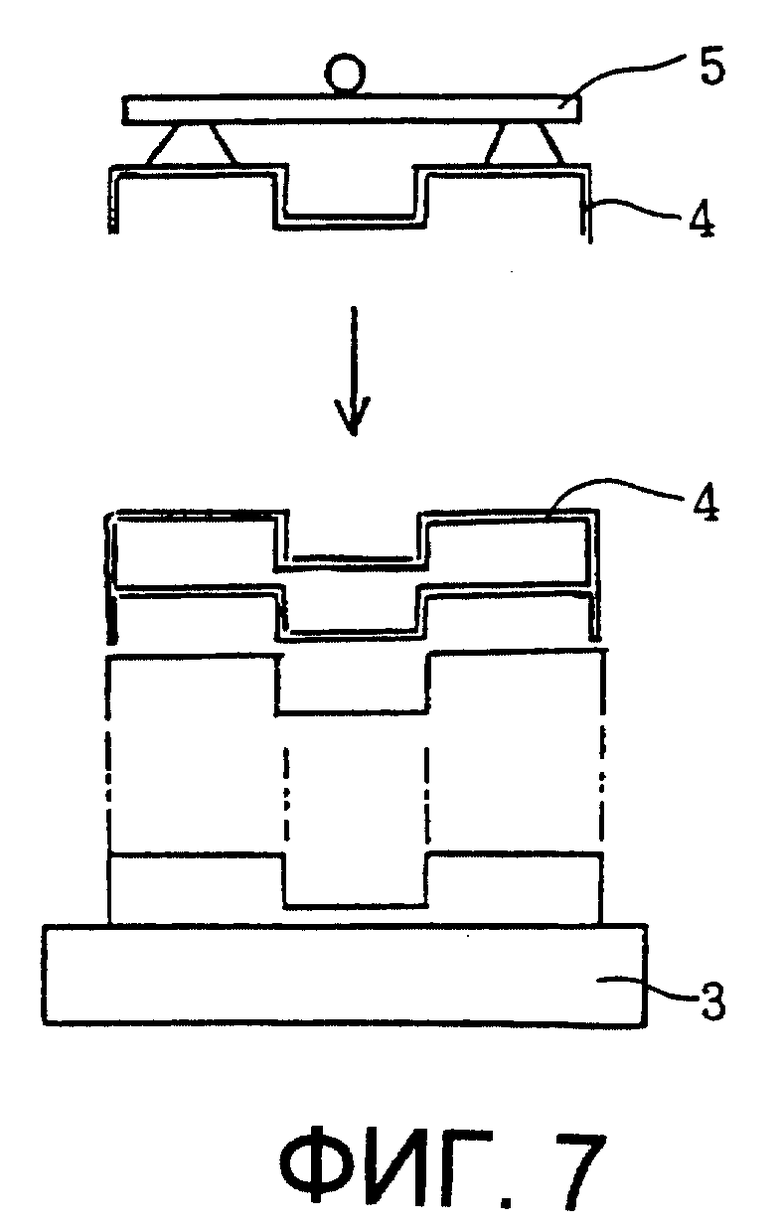
На фиг. 7 изображена принципиальная схема, иллюстрирующая этапы загрузки в способе манипулирования, соответствующем настоящему изобретению.
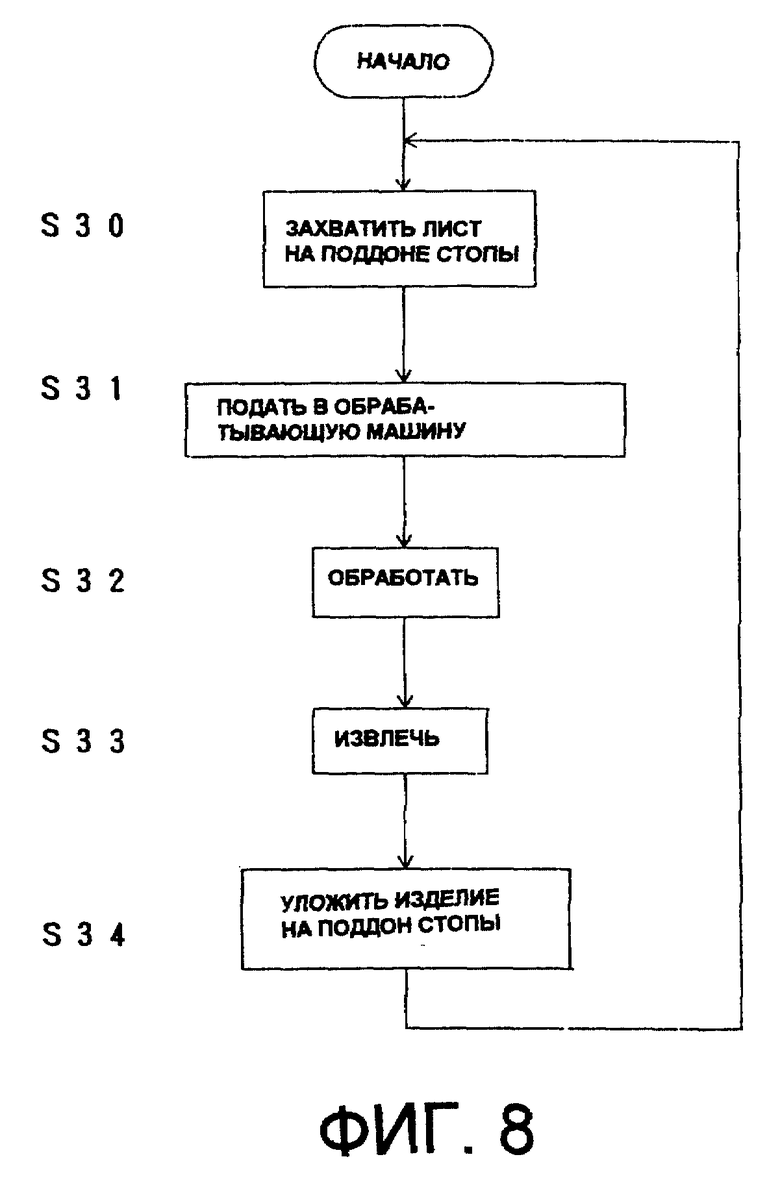
На фиг. 8 изображена блок-схема, иллюстрирующая этапы захвата в еще одном конкретном варианте осуществления способа манипулирования, соответствующего настоящему изобретению.
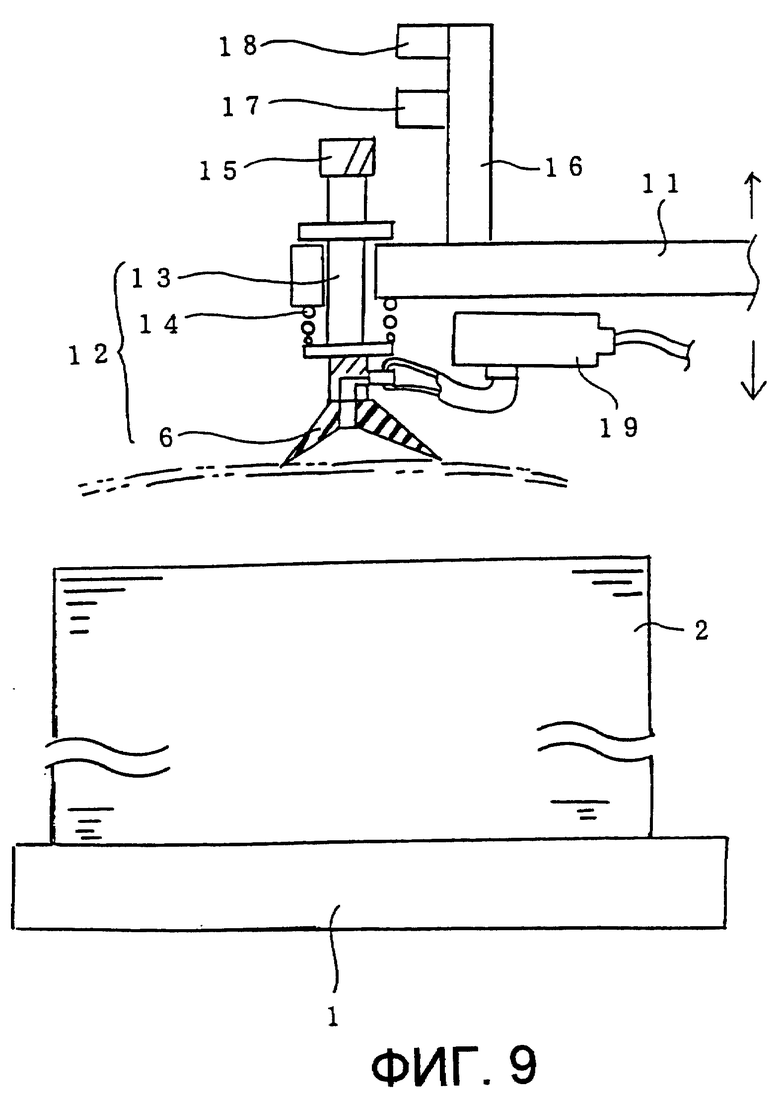
На фиг. 9 приведено схематичное изображение, иллюстрирующее модификацию кисти руки робота, соответствующего настоящему изобретению.
На фиг. 10 приведено схематическое изображение, иллюстрирующее обычный робот и его периферийные устройства.
Ниже приводится пояснение способа и робота, соответствующих настоящему изобретению, со ссылками на прилагаемые чертежи.
На фиг. 1 изображена условная блок-схема, иллюстрирующая один конкретный вариант осуществления способа манипулирования, соответствующего настоящему изобретению, на фиг. 2a и 2b изображены принципиальные схемы, иллюстрирующие этапы способа манипулирования, соответствующего настоящему изобретению, на фиг. 3 и фиг. 4 представлена блок-схема, подробно иллюстрирующая способ манипулирования, показанный на фиг. 1, на фиг. 5 изображена блок-схема, иллюстрирующая еще один конкретный вариант осуществления способа манипулирования, соответствующего настоящему изобретению, на фиг. 6 изображена условная блок-схема, иллюстрирующая одно приложение способа манипулирования, соответствующего настоящему изобретению, на фиг. 7 изображена частичная принципиальная схема, иллюстрирующая этапы укладки в стопу в способе манипулирования, соответствующем настоящему изобретению, на фиг. 8 изображена частичная принципиальная схема, иллюстрирующая этапы захвата в еще одном конкретном варианте осуществления способа манипулирования, соответствующего настоящему изобретению, и на фиг. 9 приведено схематическое изображение модификации кисти руки робота, соответствующего настоящему изобретению.
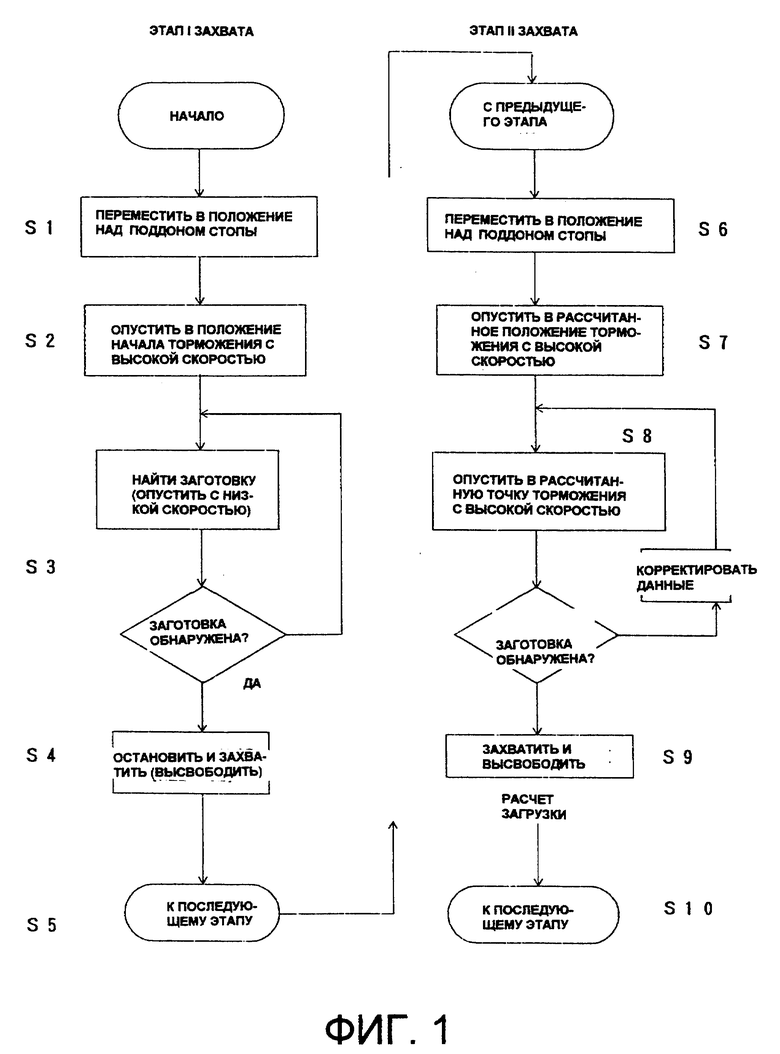
На фиг. 1 изображена блок-схема, которая иллюстрирует основной маршрут способа манипулирования, соответствующего настоящему изобретению, причем эта блок-схема применима не только к операции захвата листов 2 материала (заготовок) по одному с поддона 1 стопы, как показано на фиг. 2, но и к операции укладки в стопу изделий 4 по одному на поддоне 3 стопы, как показано на фиг. 5. Сначала поясняется последовательность действий при захвате листов 2 материала по одному с поддона 3 стопы применительно к фиг. 1 и фиг. 2.
(Этап захвата с поиском заготовки)
Левая цепочка этапа (1) на фиг. 1 и схематическое изображение на фиг. 2a иллюстрируют этап, на котором в случае, когда высота SY заготовок листов материала, уложенных на поддон 1 стопы, не известна точно, ищут самый верхний лист 2, а потом захватывают заготовку. Этап (1) состоит из следующих этапов.
Этап S1: кисть 5 руки робота перемещают в положение над поддоном 1 стопы.
Положение останова (горизонтальное положение) и высота YP останова заранее заданы.
Этап S2: кисть 5 руки робота опускают с высокой скоростью в положение YC начала поиска. Данные о положении YC начала поиска и скорости опускания заранее заданы. Этап S1 и этап S2 можно объединить в один этап.
Этап S3: кисть 5 руки робота опускают с низкой скоростью из положения YC начала поиска. А именно, поскольку точные данные о высоте SY заготовок неизвестны, кисть 5 руки робота медленно опускают до останова движения кисти 5 руки робота, мгновенно предотвращая таким образом появление повреждения на кисти руки робота, а также на листе. Скорость опускания заранее задана. Датчик обнаружения заготовки, установленный на кисти 5 руки робота, обнаруживает самый верхний лист 2. Кисть 5 руки робота опускают до тех пор, пока лист 2 не будет обнаружен датчиком обнаружения заготовки.
Этап S4: при обнаружении самого верхнего листа 2 датчиком обнаружения заготовки опускание кисти 5 руки робота прекращают и кисть 5 руки робота захватывает лист 2 своей вакуумной присоской 6. Одновременно значение, которое получено путем вычитания толщины DY одного листа 2 из текущей высоты HY кисти 5 руки робота, запоминают в качестве данных высоты SY заготовок и эти данные используют для последующего этапа захвата.
Этап S5: захваченный лист 2 поднимают на требуемую высоту KY, чтобы предотвратить ее задевание за остающийся уложенный в стопу лист 2, а затем с ней выполняют другие технологические этапы, например подачу листа в обрабатывающую машину и укладку листа в стопу.
(Этап захвата на основании запомненных данных)
Далее, со ссылками на правую технологическую цепочку этапа II и фиг. 2b поясняется так называемый "этап захвата с подачей вперед", который выполняется в случае, когда высота SY заготовок на поддоне 1 стопы известна почти точно. Хотя в этом конкретном варианте осуществления используются данные о высоте HY заготовок, полученные и запомненные на этапе S4 этапа 1 захвата, можно также использовать данные о высоте HY заготовок, полученные и запомненные различными другими способами, при которых высоту HY заготовок измеряют вручную или автоматически (п. 1 формулы изобретения составлен так, что охватывает и эти случаи).
Этап S6: после выполнения всех технологических этапов на этапе S5 кисть 5 руки робота снова перемещают в положение над поддоном стопы.
Этап S6: затем кисть 5 руки робота опускают с высокой скоростью в положение торможения, которое рассчитывают на основании обнаруженной или запомненной высоты HY заготовок. Положение торможения соответствует высоте, которую получают путем прибавления требуемой величины Ya, например 20-50 мм, к запомненной высоте SY заготовок, обнаруженной или запомненной, например, на этапе S4.
Этап S8: потом кисть 5 руки робота опускают с низкой скоростью в положение, находящееся на высоте SY заготовок.
Этап S9: в этом положении вакуумная присоска осуществляет операцию присасывания, чтобы присосать и захватить лист 2. Одновременно толщину DY листа 2 снова вычитают из текущей высоты SY заготовок, чтобы получить и запомнить высоту заготовок для следующего захватываемого и присасываемого листа 2 (SY= SY-DY).
Этап S10: процесс переходит к следующему этапу как в случае вышеупомянутого этапа S5.
Вышеупомянутые этапы S6 - S10 повторяют для захвата следующего листа 2.
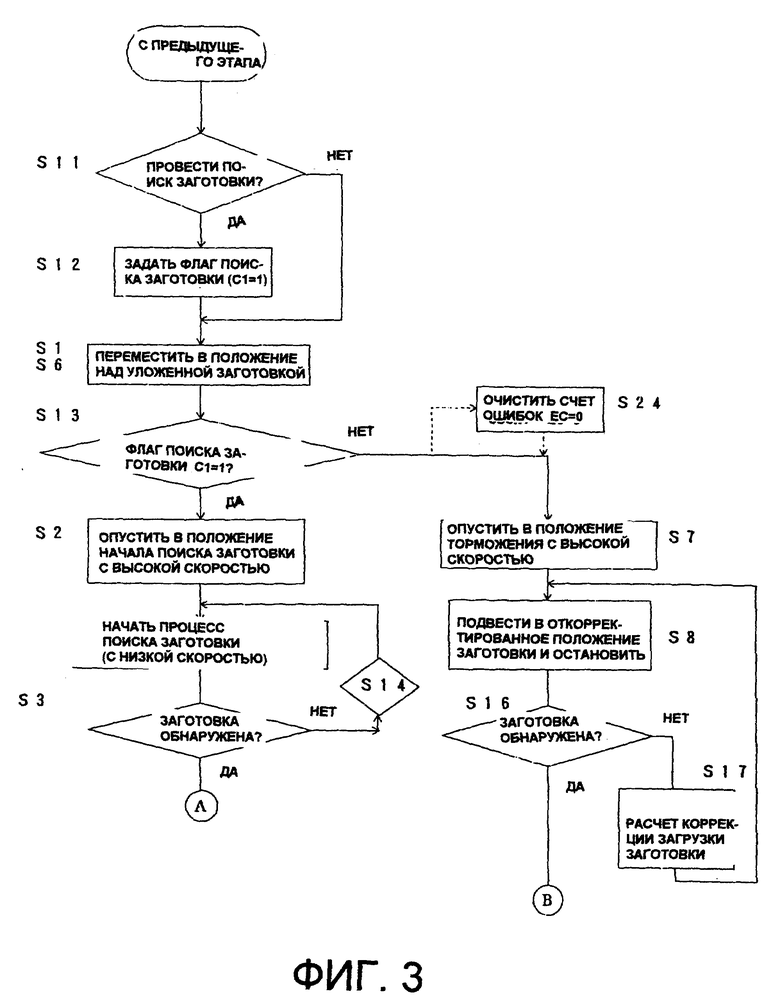
Далее со ссылками на фиг. 3 и фиг. 4 поясняется блок-схема, которая иллюстрирует этап I захвата с поиском заготовки и этап II захвата на основании запомненных данных как систематический или объединенный маршрут.
Этап S11, показанный на фиг. 3, является этапом, на котором принимают решение, следует ли проводить поиск заготовки. Например, на основании решения, принятого на этом этапе, поиск заготовки проводят только в начале процесса манипулирования или каждый раз при повторении требуемого числа передач заготовок. В случае, когда на этом этапе проводят поиск заготовки, на следующем этапе S12 задают флаг поиска заготовки (C1=1). В случае, когда поиск заготовки не проводят, флаг C1 поиска заготовки остается равным 0.
Затем, в случае, если процесс переходит либо к этапу S1, либо к этапу S6 вышеупомянутых этапов I, II захвата, на этапе S13 принимают решение о том, какую программу следует принять к исполнению между этапом I захвата, который сопровождает поиск заготовки, и этапом II захвата, который выполняют на основании запомненных данных в соответствии с заданием флага поиска заготовки, который принимает значение 1 или 0. На основании этого решения процесс переходит либо к технологической цепочке этапа I, либо к технологической цепочке этапа II.
В технологической цепочке этапа I, хотя процесс и переходит от этапа S2 к S3, как упоминалось выше, в этом конкретном варианте осуществления вводится этап S14, на котором еще один датчик обнаруживает, например, когда кисть 5 руки робота опускают на требуемую высоту, даже когда заготовка не обнаружена, и принимает решение о том, следует ли прекратить операцию поиска, на основании результата обнаружения (см. фиг. 5). Если принято решение, что операцию поиска заготовки следует прекратить, прекращают весь процесс в целом (этап 14a) и устраняют нарушение технологического процесса (этап 14b).
В случае, если операция поиска заготовки не прекращена, то есть, если датчик поиска заготовки не обнаруживает нарушение технологического процесса, операция поиска заготовки продолжается.
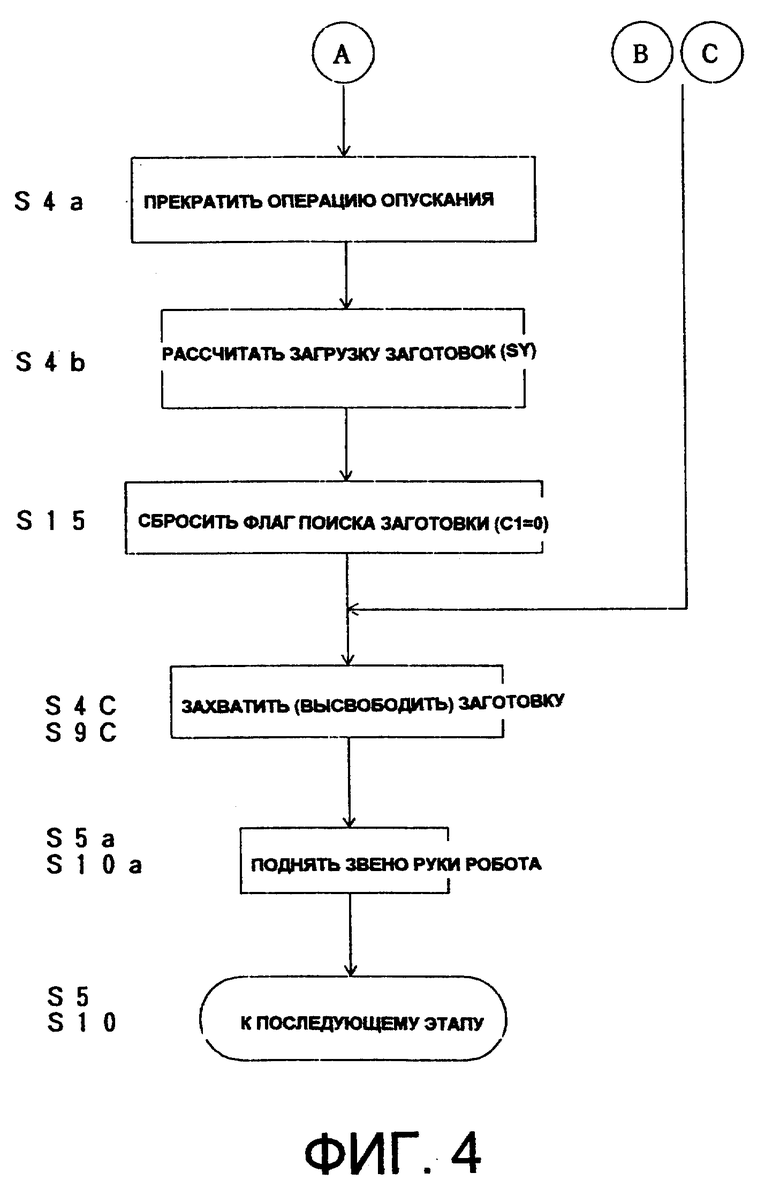
Как упоминалось выше, если на этапе S3 заготовка обнаружена, процесс переходит к этапу S4. Однако в этом процессе этап S4 разделен на три этапа, а именно этап S4a прекращения опускания, этап S4b расчета величины (SY) для загрузки заготовки и этап S4c захвата заготовки. В эти этапы введен этап S15 (см. фиг. 4), на котором флаг S1 поиска заготовки, ранее заданный на этапе S2, устанавливается в состояние 0.
Кроме того, согласно этому конкретному варианту осуществления, на этапе II захвата, который выполняют на основании запомненных данных (см. этап S7 и этапы, к которым переходят после этапа S7, показанные на фиг. 3), после этапа S8, на котором кисть 5 руки робота подходит к заготовке с низкой скоростью, введен этап S16, на котором обнаруживают наличие заготовки. Если заготовка не обнаружена, а именно, если кисть руки робота не достигает самой верхней заготовки, выполняется корректирующий расчет, при котором, например, значение DY одного листа вычитают из величины высоты SY сложенных заготовок, чтобы обновить высоту заготовок (этап S17), а кисть 5 руки робота снова опускают с низкой скоростью (этап S8). С другой стороны, если заготовка обнаружена, данные о высоте заготовок не обновляют и процесс возвращается к основной программе этапа захвата заготовок (этап S9c, см. фиг. 4).
При способе, изображенном на фиг. 6, после этапа подъема звена руки робота (этап S5a), показанного на фиг. 4, принимают решение о том, захвачена ли заготовка (этап S18). Если заготовка не захвачена, а именно кисть руки робота не может захватить заготовку или роняет заготовку во время подъема после захвата, принимают решение о подсчете ошибок (этап S19), подсчитывают число ошибок (этап S23) и выполняют корректирующий расчет количества уложенных в стопу заготовок (этап S20), а кисть руки робота подводят на скорректированную высоту заготовок (этап S21). Затем до тех пор, пока заготовка не будет обнаружена (этап S22), повторяют коррекцию высоты заготовок и подвод звена руки робота. Когда заготовка обнаружена, процесс переходит к этапам захвата заготовки (этап S4C, S9C). Потом снова или когда отказ захвата повторяется в течение некоторого заранее определенного времени принимают решение о счете ошибок на этапе S19, на котором счет ошибок сравнивают с заранее определенным значением СО, и прекращают выполнение последующих этапов, чтобы провести обработку ошибок. Для возврата подсчитываемого числа к значению 0 перед подсчетом ошибок, показанным на фиг. 6, предусмотрен этап S24 сброса счета ошибок (EC=0), показанный пунктирной линией на фиг. 3.
Хотя все вышеупомянутые конкретные варианты осуществления поясняют случаи, в которых заготовки захватываются с поддона стопы по одной, как показано на фиг. 7, процесс укладки изделий 4 в стопу на поддоне 3 стопы можно затем выполнить почти таким же способом, что и на вышеупомянутых блок-схемах (фиг. 1, фиг. 3-4). В этом случае заготовку высвобождают вместо проведения операции захвата заготовки. Когда высоту заготовок обновляют, то последовательно прибавляют высоту, которая соответствует толщине одного изделия. Кроме того, контроль процесса захвата заготовки, как показано на фиг. 6, становится необязательным.
На фиг. 8 изображена блок-схема комбинированного процесса, составленного из вышеупомянутого процесса захвата листов и процесса укладки изделий в стопу, выполняемых реальным роботом, например как показано на фиг. 10. А именно, один лист 2 захватывают с поддона 1 стопы листов, показанного на фиг. 2 (этап S30), подают в обрабатывающую машину (этап S31), часть листа 2 или обычно несколько частей листа 2 подвергают обработке во время захвата обрабатывающей машиной (этап S32). По завершении процесса обработки лист 2 извлекают из обрабатывающей машины (этап S33) и укладывают лист 2 в стопу на поддон 3 стопы изделий, показанный на фиг. 7 (этап S34). Затем робот снова подходит к поддону 1 стопы листов для захвата листа 2 заготовки. При наличии робота, который осуществляет обработку изделия в таком цикле, вышеупомянутый способ манипулирования, соответствующий настоящему изобретению, можно применить к этапу S30 для захвата заготовки и к этапу S34 для укладки изделия в стопу.
На фиг. 9 изображен один конкретный вариант осуществления предпочтительной части кисти руки робота в соответствии с настоящим изобретением. На фиг. 9 позиция 11 обозначает звено руки робота, а позиция 12 обозначает кисть руки робота. Кисть 12 руки робота содержит осевую часть 13, которая поднимается и опускается, установленную на звене 11 руки робота, вакуумную или чашечную присоску 6, установленную на нижнем конце осевой части 13, и пружину 14, предусмотренную для отклонения осевой части 13 вниз относительно звена 11 руки робота.
На верхнем конце осевой части 13 установлен ферромагнитный элемент 15, а магнитный датчик 17, который работает в качестве детектора заготовки, прикреплен к кронштейну 16, установленному на звене 11 руки заготовки, и такой магнитный датчик 17 обнаруживает подъем осевой части 13, который происходит, когда вакуумная присоска 6 вступает в контакт с листом 2, уложенным в стопу на поддоне 1 стопы листов. Над магнитным датчиком 12 и на требуемом расстоянии от него на кронштейне 16 установлен второй магнитный датчик 18 для обнаружения прекращения поиска заготовки. Этот второй магнитный датчик 18 предусмотрен для немедленного прекращения работы робота, когда магнитный датчик 17 для обнаружения заготовки отключается по любой возможной причине. Выходной сигнал второго магнитного датчика 18 используют для принятия на этапе обнаружения S14, показанном на фиг. 5, решения о прекращении поиска заготовки. Кроме того, звено 11 руки робота снабжено датчиком 19 вакуума для обнаружения отказа захвата вакуумной присоски 6. Вакуумная присоска 6 соединена с источником вакуума, например вакуумным насосом или вытяжным вентилятором типа трубки Вентури, посредством датчика 19 вакуума. Вышеупомянутый магнитный датчик может быть выполнен на основе датчика других типов при условии, что он используется для обнаружения положения. Например, вместо магнитного датчика можно использовать фотоэлектрических датчик.
Основной корпус робота и его регулирующее устройство могут быть выполнены на основе тех, которые используются в обычном роботе, показанном на фиг. 10. Робот этого типа содержит основной корпус, который выполнен из опорной стойки 62, неподвижно установленной на фундаменте, множество звеньев 52, 52, 52 руки робота, которые последовательно опираются на опорную стойку 62 и выполнены с возможностью поворота друг относительно друга посредством множества вращательных сочленений 51, 51, множество двигателей M1, M2, M3 для вращательного привода звеньев 52, 52, 52 руки робота, множество детекторов положения, которые обнаруживают углы вращения соответствующих двигателей или звеньев руки робота и т.п., и регулирующее устройство, которое состоит главным образом из микрокомпьютера, формирующего сигналы привода для осуществления привода группы двигателей привода M1, M2, M3 в соответствии с требуемой программой, основанной на обнаруженных данных и предписывающих данных, и передающего такие сигналы привода на двигатели привода M1, M2, M3.
Элементы, обнаруживающие высоту заготовок, которые можно использовать в способе и роботе, соответствующих настоящему изобретению, могут состоять из элементов обнаружения углов, например кодовых датчиков, установленных на вращательных сочленениях, и блока регулирующего устройства, который преобразует обнаруженные углы в координату высоты. Хотя захватывающая кисть руки робота выполнена из вакуумной присоски того типа, который описан в вышеупомянутом конкретном варианте осуществления, захватывающая кисть руки робота может быть выполнена из всасывающего элемента электромагнитного типа или из элемента типа захватывающего пальца. Хотя способ, соответствующий настоящему изобретению, применяется не только для захвата листов, но и для укладки изделий в стопу в конкретном варианте осуществления, изображенном на фиг. 8, можно заимствовать обычный способ в одном из процессов или использовать поддон стопы, который поднимается и опускается, и заимствовать способ, соответствующий настоящему изобретению, только для процесса захвата листов или процесса укладки изделий в стопу.
Промышленная применимость
Способ манипулирования, соответствующий настоящему изобретению, требует меньше времени для подхода к заготовке, так что время рабочего цикла можно резко уменьшить по сравнению с обычным способом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный комплекс для листовой штамповки | 1979 |
|
SU774722A1 |
| СПОСОБ И УСТАНОВКА ДЛЯ ИЗГОТОВЛЕНИЯ МЕТАЛЛИЧЕСКОГО ЛИСТА С ПОКРЫТИЕМ ИЗ ОРГАНИЧЕСКОЙ СМОЛЫ | 2007 |
|
RU2396167C1 |
| ТРАНСПОРТИРОВОЧНОЕ УСТРОЙСТВО | 2015 |
|
RU2617979C1 |
| Установка для отделения листовых заготовок от стопы,подачи в пресс и удаления обработанного материала | 1982 |
|
SU1049265A1 |
| УКЛАДЫВАЮЩЕЕ В СТОПУ УСТРОЙСТВО И СПОСОБ УКЛАДЫВАНИЯ В СТОПУ | 2012 |
|
RU2548161C1 |
| Вакуумный захват | 1982 |
|
SU1058865A1 |
| Промышленный робот | 1982 |
|
SU1186077A3 |
| Захват для перемещения заготовок | 1983 |
|
SU1138305A1 |
| КОМБИНИРОВАННОЕ ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА-МАНИПУЛЯТОРА | 2019 |
|
RU2730343C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО МАНИПУЛИРОВАНИЯ ЛЕГКОПОВРЕЖДАЕМЫМИ ЗАГОТОВКАМИ | 1997 |
|
RU2194606C2 |
Изобретения относятся к области машиностроения и могут быть использованы при подаче заготовок в обрабатывающую машину или при укладке их в стопу на поддоне. Кисть руки робота устанавливают на заранее определенном расстоянии над поддоном, подводят к стопе, устанавливают и захватывают заготовку или освобождают захваченную. Кисть руки подводят в 2 этапа. На первом этапе кисть перемещают с высокой скоростью в положение начала торможения. На втором этапе кисть перемещают на уровень высоты стопы заготовок, значение которой хранится в памяти, с низкой скоростью. Останавливают кисть на указанной высоте. Предварительно может быть произведен поиск заготовки. Для этого кисть руки робота устанавливают в положение на заранее определенном расстоянии над поддоном стопы. После подвода кисти до заготовки или поддона вводят в память значение высоты стопы заготовок. Это значение используют при подведении кисти руки к заготовке. Используемый для манипулирования заготовками робот содержит кисть руки робота, звенья руки, механизм подъема и опускания звена руки робота, средство определения высоты звеньев руки робота, блок регулировки высоты звеньев и скорости опускания руки и средство обнаружения заготовки. В результате обеспечивается сокращение цикла манипулирования. 3 с. и 5 з.п. ф-лы, 10 ил.
| Промышленный робот | 1987 |
|
SU1461614A1 |
| Робот к листоштамповочному прессу | 1986 |
|
SU1301531A1 |
| Устройство управления схватом манипулятора | 1987 |
|
SU1442395A2 |
| Промышленный робот | 1987 |
|
SU1454549A1 |
| US 4587618 A, 06.05.86 | |||
| DE 3619162 A1, 25.06.87 | |||
| DE 3127056 A1, 11.11.82. | |||
