Настоящее изобретение касается устройства хранения и подачи бесконечных рабочих лент, в частности абразивных лент для установки механической обработки, содержащей робот-манипулятор.
Робот-манипулятор оборудован одной или несколькими рабочими лентами, которые необходимо регулярно менять, чтобы сменить тип используемой ленты или поменять изношенную ленту на новую.
Из патента FR-А1-2677289 известна установка для механической обработки, содержащая устройство подачи бесконечных абразивных лент, содержащее множество площадок-держателей ленты, установленных в вертикальной кассете, с системой, подвижной в вертикальном и горизонтальном направлениях, позволяющей извлекать площадки одну за другой из кассеты и подавать их к роботу-манипулятору. Недостаток такого устройства подачи является его сложность и слишком большое число операций, которые необходимо осуществить для замены абразивной ленты на манипуляторе, в результате чего замена лент занимает много времени и может потребовать участия оператора.
Настоящее изобретение предлагает простое, эффективное и экономичное решение этой проблемы.
Объектом настоящего изобретения является устройство хранения и подачи бесконечных рабочих лент для роботизированной установки, содержащее средства удержания множества рабочих лент и средства позиционирования этих лент на средствах удержания, отличающееся тем, что средства удержания и позиционирования содержат суппорт, вращающийся вокруг вертикальной оси и содержащий радиальные стойки, каждая из которых оборудована средством позиционирования рабочей ленты, и средства пошагового вращения вращающегося суппорта для последовательной подачи каждой стойки к посту установки ленты на роботе-манипуляторе.
Благодаря звездообразной конфигурации устройства в соответствии с настоящим изобретением замена ленты на роботе-манипуляторе происходит быстро и при минимальном числе операций, поскольку достаточно повернуть суппорт на долю оборота, чтобы подать новую ленту в положение захвата этой ленты роботом-манипулятором.
Устройство может содержать, например, двенадцать радиальных стоек, равномерно распределенных вокруг вертикальной оси.
Предпочтительно, чтобы средства позиционирования ленты содержали убирающиеся пальцы, направляемые в гнездах стоек и заходящие в концы лент, и возвратные пружины, перемещающие пальцы в их положение удержания лент.
Пальцы позиционирования заходят в ленту, поддерживаемую радиальной стойкой, и позволяют удерживать эту ленту в положении, в котором лента имеет небольшое натяжение, таким образом, что ленты удерживаются на радиальных стойках в одинаковом положении. Поэтому нет необходимости проверки правильного положения лент в устройстве со стороны оператора. Убирающиеся пальцы постоянно удерживаются возвратными пружинами в их положении удержания лент.
Верхние концы пальцев позиционирования ленты образуют опорные поверхности, к которым прижимаются нижние концы двух шкивов робота-манипулятора для убирания пальцев и установки ленты на шкивы робота.
Установка ленты на робот-манипулятор происходит автоматически при перемещении робота-манипулятора таким образом, чтобы шкивы опирались на пальцы, заставляя их убираться и высвобождать ленту. Шкивы робота-манипулятора, заходящие в концы ленты, отодвигаются друг от друга таким образом, чтобы лента оказалась натянутой между шкивами. После этого робот-манипулятор может уносить ленту и осуществлять операции механической обработки.
Предпочтительно, чтобы каждая радиальная стойка содержала, например, пластину удлиненной формы, поддерживающую края ленты и содержащую на своих концах отверстия для прохождения пальцев позиционирования.
Предпочтительно также, чтобы эта пластина содержала направляющую прорезь удлиненной формы, выполненную между двумя краями ленты и позволяющую опускаться части робота-манипулятора и облегчающую его позиционирование во время раздвигания шкивов стойки.
Предпочтительно также, чтобы устройство содержало, по меньшей мере, один датчик обнаружения присутствия рабочих лент на радиальных стойках. Датчик может обнаруживать присутствие ленты на радиальной стойке, находящейся в месте установки ленты на робот-манипулятор. Если на роботе нет ленты, вращающийся суппорт приводится во вращение на один шаг, чтобы в месте установки оказалась новая радиальная стойка и чтобы датчик смог обнаружить присутствие ленты на этой стойке. Если там ленты все же не оказывается, операция возобновляется, пока в месте установки не окажется лента.
Оператор может вмешаться в работу устройства, чтобы установить в него новые ленты. Эта операция может осуществляться также автоматом.
Настоящее изобретение и его другие преимущества, и отличительные признаки будут более очевидны из нижеследующего описания, представленного в качестве не ограничительного примера, со ссылками на прилагаемые чертежи, в числе которых:
Фиг.1 изображает схематичный вид сверху устройства хранения и подачи бесконечных рабочих лент в соответствии с настоящим изобретением.
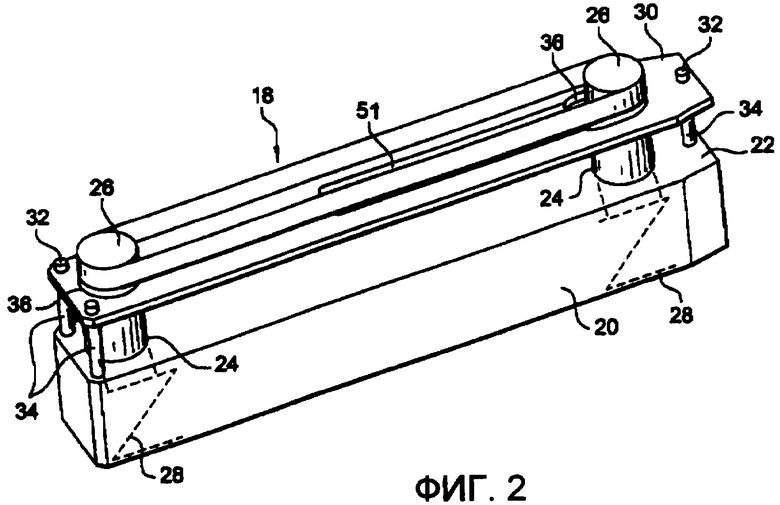
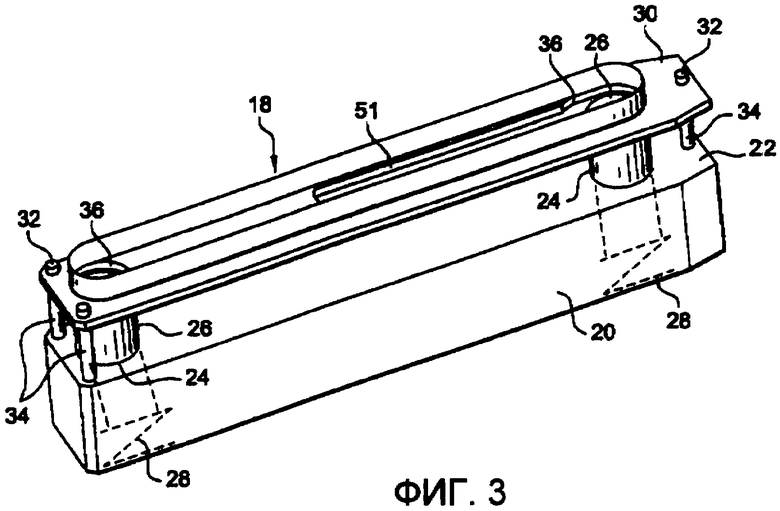
Фиг.2 и 3 - схематичный вид в изометрии радиальной стойки устройства, показанного на фиг.1.
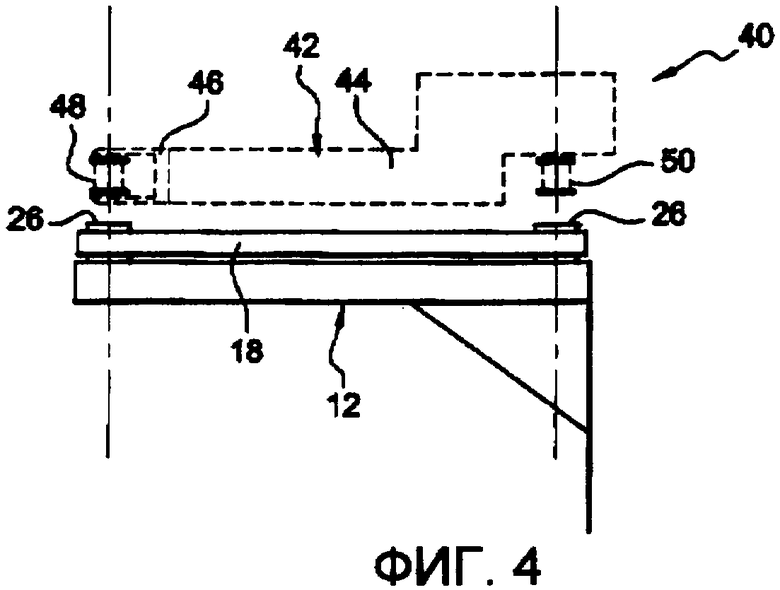
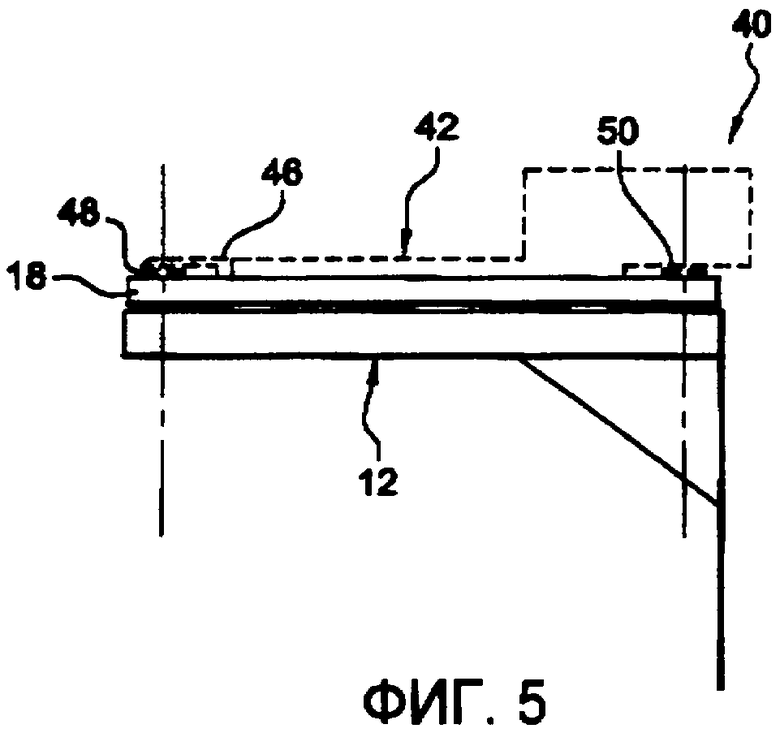
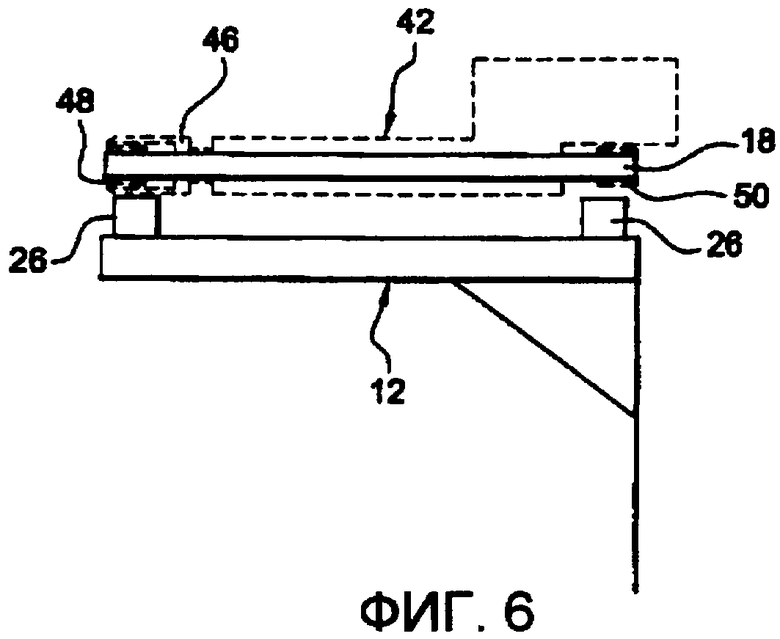
Фиг.4-6 изображают очень схематичный вид сбоку радиальной стойки устройства в соответствии с настоящим изобретением на различных этапах способа установки ленты на робот-манипулятор.
На фиг.1 схематично показан вариант выполнения устройства 10 хранения и подачи бесконечных рабочих лент в соответствии с настоящим изобретением для установки механической обработки, содержащей робот-манипулятор 40.
Устройство 10 содержит множество стоек 12 удержания и позиционирования лент, выполненных в радиальном направлении вокруг вертикальной оси 14 и равномерно распределенных вокруг этой оси 14. Радиальные стойки 12 крепятся винтами 15 или аналогичными средствами крепления на круглой площадке 16, вращаемой пошаговым движением вокруг оси 14 приводными средствами. Устройство содержит также конструкцию, поддерживающую и направляющую вращение площадки 16.
В представленном примере радиальные стойки 12 выполнены в количестве двенадцати, и площадка приводится во вращение пошаговым движением с шагом 30°.
Рабочие ленты могут быть лентами любого типа, например абразивными лентами. Ленты, установленные на роботе-манипуляторе 40, необходимо регулярно менять, в частности для замены изношенной ленты новой лентой. Пошаговое вращение площадки 16 управляется блоком управления робота-манипулятора таким образом, чтобы площадка перемещалась вращением в зависимости от потребности в ленте робота-манипулятора.
Устройство содержит также один или несколько датчиков 17 обнаружения наличия ленты на радиальных стойках 12, при этом датчики передают сигналы в блок управления робота-манипулятора.
Каждая радиальная стойка 12, более детально показанная на фиг.2 и 3, содержит средства удержания ленты 18 и средства позиционирования этой ленты на средствах удержания таким образом, чтобы эту ленту мог непосредственно снимать робот-манипулятор без вмешательства оператора.
Средства позиционирования содержат корпус 20 в форме удлиненного параллелепипеда, содержащий верхнюю большую сторону 22, содержащую на своих продольных концах два отверстия 24 для прохождения убирающихся цилиндрических пальцев 26, при этом лента 18 устанавливается намотанной вокруг этих пальцев 26.
Пальцы 26 расположены по существу параллельно и на расстоянии друг от друга, при этом расстояние между пальцами определяют таким образом, чтобы лента, намотанная на пальцы, находилась в вытянутом или слабо натянутом состоянии и содержала в этом состоянии два больших прямолинейных участка, параллельных друг другу и находящихся вблизи друг от друга.
В корпусе 20 установлены возвратные пружины 28 (схематично показанные на чертеже пунктирными линиями), расположенные между нижней стороной корпуса и нижними концами пальцев 26 таким образом, чтобы действовать на эти пальцы усилиями, направленными наружу корпуса, заставляя их занимать положение удержания ленты. Предусмотрены также средства ограничения хода пальцев внутрь и наружу корпуса через отверстия 24.
Верхние концы пальцев 26 образуют опорные поверхности, на которые может опираться робот-манипулятор, как будет показано ниже.
Средства удержания ленты на радиальной стойке 12 содержат плоскую пластину 30 удлиненной формы, которая по существу имеет такие же размеры по ширине и длине, что и верхняя сторона 22 корпуса 20, и которая закреплена сверху и на расстоянии от этой стороны при помощи винтов 32. Расстояние между пластиной 30 и стороной 20 корпуса определено, например, трубками 34 заданной длины, заходящими вокруг винтов и вставленными между пластиной 30 и верхней стороной 22 корпуса 20.
На своих продольных концах пластина 30 содержит два отверстия 36 для прохождения пальцев 26, при этом внутренний диаметр этих отверстий превышает наружный диаметр пальцев.
Пальцы 26 выполнены с возможностью перемещения в осевом направлении между первым и вторым положениями и постоянно удерживаются в первом положении возвратными пружинами 28.
В первом положении, показанном на фиг.2, верхние концевые части пальцев 26 проходят через отверстия 36 пластины 30 и выступают над этой пластиной. В этом положении пальцы заходят в рабочую ленту 18, уложенную на пластину 30, и удерживают эту ленту в вытянутом или слегка натянутом состоянии.
Во втором положении, показанном на фиг.3, пальцы 26 утоплены под пластину 30 и больше не заходят в ленту 18, которая находится на пластине и в этом случае оказывается свободной и может быть перемещена роботом-манипулятором. Расстояние между пластиной и корпусом 20 определяют таким образом, чтобы пальцы не выступали над пластиной, когда они находятся в своем втором положении.
Как будет подробнее описано ниже со ссылками на фиг.4-6, перемещение пальцев из их первого положения в их второе положение происходит механически под действием робота-манипулятора.
Робот-манипулятор 40, частично и очень схематично показанный на фиг.4, содержит гидропривод 42, цилиндр 44 которого закреплен на роботе-манипуляторе и поршень 46 которого соединен с ведомым шкивом 48, установленным и свободно вращающимся вокруг оси, перпендикулярной к продольной оси гидропривода. Кроме того, робот-манипулятор содержит ведущий шкив 50, который установлен параллельно первому шкиву сзади гидропривода и ось которого параллельна оси гидропривода 42. Этот шкив 50 приводится во вращение двигателем, установленным в роботе-манипуляторе.
На первом этапе установки ленты 18 на робот-манипулятор, показанном на фиг. 4, гидропривод 42 робота-манипулятора находится в заднем положении, в котором расстояние между осями шкивов 48, 50 по существу равно расстоянию между осями пальцев 26. Робот-манипулятор 40 перемещается в положение над радиальной стойкой 12 устройства, содержащей ленту (фиг.1) до момента, когда шкивы 48, 50 оказываются на одной линии над пальцами 26. После этого робот-манипулятор 40 перемещается вертикально к радиальной стойке 12, и шкивы 48, 50 робота-манипулятора заходят в ленту 18 и перемещают пальцы 26 из их первого положения в их второе положение, опираясь на верхние концы пальцев (фиг.5). Затем поршень 46 приводится в движение, чтобы раздвинуть шкивы 48, 50 до момента, когда лента 18 окажется натянутой между шкивами. После этого ленты могут быть перемещены для осуществления операции механической обработки (фиг.6). Пальцы 26 возвращаются в их первое положение под действием возвратных пружин 28. Оператор или автомат может установить новую ленту 19 на пальцы 26.
Блок управления робота-манипулятора управляет перемещением робота-манипулятора и площадки 16 в зависимости от информации, полученной от датчика 17. Площадка 16 приводится во вращение пошаговым движением вокруг оси 14, пока радиальная стойка 12, оснащенная лентой, не окажется в заранее определенном положении захвата ленты, чтобы ленту можно было установить на робот-манипулятор путем осуществления этапов, показанных на фиг.4-6.
Как показано на фиг.1-3, пластина 30 каждой радиальной стойки 12 может содержать прорезь 51 удлиненной формы, выполненную вдоль краев ленты 18 и соединенную одним из своих концов с одним из вышеуказанных отверстий 36 для прохождения пальцев 26 таким образом, чтобы облегчить захождение гидропривода 42 робота-манипулятора в ленту 18 и направлять перемещение поршня 46 гидропривода.
В частном варианте осуществления настоящего изобретения устройство дополнительно содержит вертикальную стенку 52, которая делит устройство на две группы по шесть радиальных стоек каждая, при этом первая группа является доступной для робота-манипулятора 40, а другая группа доступна для оператора для установки новых рабочих лент. При каждом перемещении вращением площадки 16 вокруг оси 14 на один шаг одна из радиальных стоек 12 первой группы переходит во вторую группу, и одна из радиальных стоек 12 второй группы переходит в первую группу.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТИЗИРОВАННЫЙ ИНСТРУМЕНТ ДЛЯ МЕХАНИЧЕСКОЙ ОБРАБОТКИ БЕСКОНЕЧНОЙ РАБОЧЕЙ ЛЕНТОЙ | 2008 |
|
RU2452604C2 |
| УСТРОЙСТВО ДЛЯ ПЛЕТЕНИЯ СЕТОК | 1991 |
|
RU2020016C1 |
| СИСТЕМА И СПОСОБ ДОЗАПРАВКИ СПУТНИКОВ | 2008 |
|
RU2478534C2 |
| ЛИНИЯ ДЛЯ ЛИТЬЯ ПОД НИЗКИМ ДАВЛЕНИЕМ, УСТАНОВКА ДЛЯ ЛИТЬЯ ПОД НИЗКИМ ДАВЛЕНИЕМ И МАНИПУЛЯТОР ДЛЯ ПЕРЕМЕЩЕНИЯ ОТЛИВОК | 2001 |
|
RU2205090C2 |
| РОБОТИЗИРОВАННАЯ ХИРУРГИЧЕСКАЯ СТАНЦИЯ | 2014 |
|
RU2657958C2 |
| Система и способ дозаправки спутников | 2008 |
|
RU2607912C2 |
| УСТРОЙСТВО ДЛЯ ВЫРАВНИВАНИЯ ИЗДЕЛИЯ, В ЧАСТНОСТИ ПОЛУФАБРИКАТА КЕРАМИЧЕСКОГО ИЗДЕЛИЯ | 2008 |
|
RU2458789C2 |
| Устройство для закрепления длинномерных материалов на манипуляторной машине | 1985 |
|
SU1261812A1 |
| Линия для формования подошв на голенища обуви | 1985 |
|
SU1512472A3 |
| РАБОЧАЯ СТАНЦИЯ С МНОГОСТОРОННИМ ДЕРЖАТЕЛЕМ ДЕТАЛЕЙ И СПОСОБ УПРАВЛЕНИЯ ТАКОЙ СТАНЦИЕЙ | 2007 |
|
RU2404043C1 |
Изобретение относится к области машиностроения и представляет собой устройство (10) для хранения бесконечных рабочих лент и их подачи в роботизированную установку, содержащую робот-манипулятор (40). Устройство (10) включает суппорт (16), который вращается вокруг вертикальной оси (14) и содержит радиальные стойки (12). Каждая из (стоек) оборудована средствами позиционирования рабочей ленты. Устройство содержит также средства пошагового вращения суппорта (16) для последовательной подачи каждой стойки к пункту установки ленты на роботе-манипуляторе (40). Обеспечивается простая, эффективная и экономичная замена абразивной ленты на манипуляторе. 7 з.п. ф-лы, 6 ил.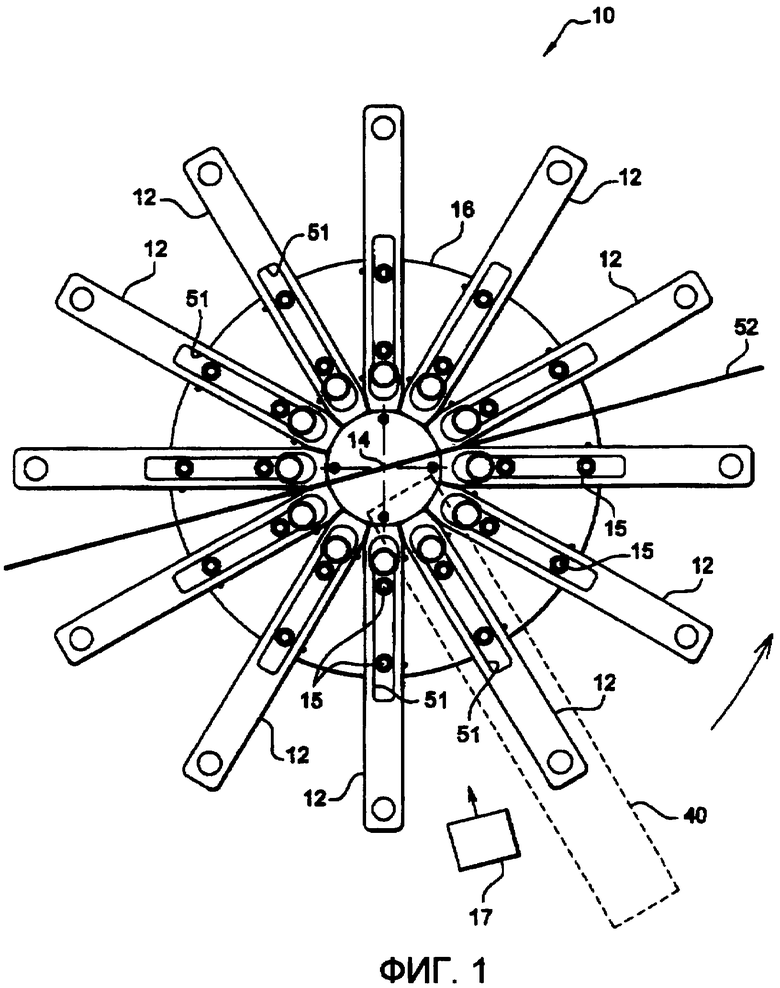
1. Устройство для хранения бесконечных рабочих лент (18) и подачи их в роботизированную установку, содержащее средства удержания множества рабочих лент и средства позиционирования этих лент на средствах удержания, отличающееся тем, что средства удержания и позиционирования содержат суппорт (16), вращающийся вокруг вертикальной оси (14) и содержащий радиальные стойки (12), каждая из которых оборудована средствами позиционирования рабочей ленты (18) и средства пошагового вращения суппорта (16) для последовательной подачи каждой стойки к месту установки ленты на роботе-манипуляторе (40).
2. Устройство по п.1, отличающееся тем, что средства позиционирования содержат убирающиеся пальцы (26), направляемые в гнездах стоек (12) и заходящие в концы лент (18), и возвратные пружины (28), перемещающие пальцы (26) в их положение удержания лент.
3. Устройство по п.2, отличающееся тем, что верхние концы пальцев (26) позиционирования ленты (18) образуют опорные поверхности, к которым прижимаются нижние концы двух шкивов (48, 50) робота-манипулятора для убирания пальцев и установки ленты на шкивы робота.
4. Устройство по п.2, отличающееся тем, что лента (18) находится в натянутом состоянии, когда она позиционирована убирающимися пальцами (26).
5. Устройство по п.2, отличающееся тем, что каждая радиальная стойка (12) содержит пластину (30) удлиненной формы, поддерживающую края ленты (18) и содержащую на своих концах отверстия (36) для прохождения пальцев (26) позиционирования.
6. Устройство по п.5, отличающееся тем, что пластина (30) содержит прорезь (51) удлиненной формы, выполненную между двумя краями ленты и предназначенную для опускания части робота-манипулятора.
7. Устройство по п.1, отличающееся тем, что содержит двенадцать радиальных стоек (12).
8. Устройство по п.1, отличающееся тем, что содержит, по меньшей мере, один датчик (17) обнаружения присутствия рабочих лент (18) на радиальных стойках (12).
| Способ ранней диагностики повреждения почек у больных с начальной стадией хронической болезни почек | 2018 |
|
RU2677289C1 |
| US 6224121 B1, 01.05.2001 | |||
| Способ подачи гибкого металлического листа | 1985 |
|
SU1379204A1 |
| US 5256128 A, 26.10.1993 | |||
| US 5201617 A, 13.04.1993. | |||

