Предлагаемое изобретение относится к области судовождения - автоматическому управлению движением судна по заданному направлению с выявлением встречных объектов и расхождения с ними с использованием приемника спутниковой навигационной системы, радаров, рулевого привода и вычислителя штатной системы автоматического управления движением судна.
Известен "Способ экспериментального определения параметров математической модели движения судна". (патент России №2151713). В рассматриваемом способе, благодаря использованию информации о состоянии судна от приемника спутниковой навигационной системы, удается идентифицировать все коэффициенты полной математической модели движения судна, чтобы обеспечить автоматическое управление движением судна.
Известен способ автоматического управления движением судна по заданному путевому углу, реализованный в «Системе автоматического управления движением судна» (патент России №2245914). Способ управления движением судна основан на использовании информация от приемника спутниковой навигационной системы, блока заданного значения путевого угла и сумматора, в котором по сигналам текущего путевого угла, заданного путевого угла формируется сигнал управления рулевым приводом судна.
Известен также «Способ автоматического управления движением судна» (патент России №2292289, принятый в качестве прототипа), в котором с использованием сигналов о местонахождении судна из приемника спутниковой навигационной системы, точек поворота судна по заданной траектории движения «А», «Б», «В»… из программного блока и системы автоматического управления движением судна, выполненной по патенту России №2245914, удается полностью автоматизировать процесс управления движением судна по заданной траектории. В рассматриваемом способе исключена статическая ошибка стабилизации путем введения в сумматор системы автоматического управления движением судна сигнала коррекции к заданному путевому углу «ΔПУзд.». Сигнал «ΔПУзд.» вводят в сумматор системы автоматического управления движением судна для управления рулевым приводом, обеспечивая тем самым астатическое управление движением судна к заданной точке маршрута. Однако использование этого способа ограничено, т.к. при появлении встречных объектов судоводитель должен активно включаться в процесс управления движением судна, чтоб обеспечить расхождение судна со встречным объектом (вводя корректирующий сигнал «ΔПУзд.», на величину которого требуется изменить направление движения судна, чтобы исключить столкновение со встречным объектом).
В предлагаемом способе автоматического управления движением судна рассмотренное ограничение устранено. Сигнал коррекции к заданному путевому углу «ΔПУзд.» формируют автоматически с использованием радара (выдающего сигналы вектора расстояния от судна до встречного объекта), вычислителя (в котором формируют сигналы текущей широты, долготы и вектор скорости движения встречного объекта, а также будущие траектории движения судна и встречного объекта) и прогнозатора (в последнем формируют сигнал коррекции к заданному путевому углу «ΔПУзд.», который вводят в сумматор системы автоматического управления движением судна).
Целью предлагаемого способа расхождения судна с встречным объектом является:
- определение в ограниченной акватории движения судна встречного объекта, с которым возможно столкновение,
- нахождение минимально возможной величины отклонения судна ΔПУзд. от заданного направления движения, при котором исключена возможность будущего столкновения, автоматического перевода судна на новое направление движения ПУзд.+ΔПУзд.,
- автоматическое отключение ΔПУзд. после окончания режима расхождения и выхода судна на заданную траекторию движения.
Рассмотрим как реализуется поставленная цель при использовании предложенного способа.
Способ расхождения судна с встречным объектом основан на использовании:
- рулевого привода,
- сумматора системы автоматического управления движением судна, на выходе которого формируется сигнал управления рулевым приводом,
- приемника спутниковой навигационной системы (СНС), вырабатывающего текущую широту, долготу судна и скорость хода,
- радара, выдающего сигнал вектора расстояния от судна до встречного объекта,
- вычислителя, в котором формируют сигналы текущей широты, долготы и вектора скорости встречного объекта (по сигналам: вектора расстояния от судна до встречного объекта, поступающим от радара, текущей широты и долготы судна и его скорости, которые поступают от приемника СНС), в вычислителе также формируют в заданной акватории движения судна будущие траектории движения судна и встречного объекта, а также формируют условие столкновения с встречным объектом,
- прогнозатора, работающего в ускоренном масштабе времени, для формирования сигнала коррекции к заданному путевому углу «ΔПУзд.»,
- блока программирования, в котором формируется сигнал коррекции к заданному путевому углу ΔПУi=1. (При выполнении условия столкновения сигнал ΔПУi=1 вводится в прогнозатор для выполнения повторного цикла вычислений при повторном выполнении условия столкновения формируется ΔПУi=2 и цикл повторяется… при «n» цикле, когда условия столкновения не выполняется,
сигнал ΔПУi=n=ΔПУзд. вводится в сумматор для управления рулевым приводом и на электронную карту.
Рассмотрим последовательность выполнения операций в способе расхождения судна с встречным объектом (формирование сигнала «ΔПУзд.» для автоматического изменения направления движения судна при выявлении опасности столкновения с встречным объектом).
На выходе сумматора системы автоматического управления движением судна формируют сигнал управления рулевым приводом с использованием сигнала заданного значения путевого угла «ПУзд.» и текущего путевого угла «ПУ» от приемника СНС, что обеспечивает движение судна по заданному путевому углу «ПУзд.».
Сигналы вектора расстояния от судна до встречного объекта, формируемые радаром, вводят в вычислитель. В вычислитель также вводят сигналы широты, долготы и скорости хода судна из приемника СНС. В вычислителе формируют сигналы:
- широты, долготы и вектор скорости хода встречного объекта,
- траекторий будущего движения судна и встречного объекта в заданной акватории,
- при наличии пересечении двух траекторий формируют сигналы времени движения судна и времени движения встречного объекта до места пересечения траекторий,
- выполнения условия столкновения в окрестности точки А1, находящейся на траектории будущего движения судна. (Если в будущий момент времени τА1судна±Δ встречный объект окажется на траектории движения судна в точке траектории A1, то можно утверждать, что в точке A1 произойдет столкновение судна с встречным объектом):

где τ.А1,объект=(А0об.(Ф0объекта, λ0объекта)-А1(ФА1, λА1))/Vоб,
А0об. - текущая точка местонахождения встречного объекта,
A1(ФА1, λA1) - точка будущего нахождения встречного объекта при пересечении с траекторией движения судна, объекта,
τА1,судна=(А0(Ф0, λ0)-А1(ФА1, λА1))/Vс,
А0-(Ф0,λ0) - текущая точка местонахождения судна,
A1(ФA1, λА1) - точка будущего нахождения судна при пересечении с траекторией движения встречного объекта,
Vc - скорость хода судна,
Δ - var. (изменяется в диапазоне: - С<Δ<+С).
При выполнении условия (1) сигналы широты и долготы точки A1 из вычислителя поступают в программный блок. На выходе программного блока формируется сигнал коррекции направления вектора движения судна ΔПУi=1, который вводят в прогнозатор. В прогнозаторе в ускоренном масштабе времени формируют траектории движения судна и встречного объекта до будущего пересечения двух траекторий в точке А2 или до границ заданной акватории.
При наличии пересечения траекторий в точке А2 в прогнозаторе формируют сигналы времени движения судна от точки А0 до точки А2
«τА2судна» и встречного объекта от точки А0об. до точки А2 «τ.А2,объкта»
τА2судна.=(А0(Ф0, λ0)-А2(ФА2, λА2))/Vс,
τ.А2,объекта=(А0 об(Ф0 об, λ0 об)-А2(ФА2, λА2))/Vоб,
где
А0-(Ф0,λ0) - текущая точка местонахождения судна,
А2(ФА2, λА2) - точка будущего нахождения судна и встречного объекта,
Vc - скорость хода судна,
А0 об - текущая точка местонахождения внешнего объекта,
Vоб - скорость хода внешнего объекта,
Δ - var. (изменяется в диапазоне - С<Δ<+С).
Формируют сигнал условия столкновения в окрестности точки А2.

При выполнении условия (1А2) сигналы широты и долготы точки А2 из прогнозатора поступят в программный блок, в котором вырабатывается сигнал коррекции вектора движения судна ΔПУi=2, этот сигнал используется в прогнозаторе для повторного цикла вычислений. Аналогично рассмотренному циклу циклы ускоренных вычислений в прогнозаторе повторяют до «n» цикла, когда условие столкновения (1An) не выполняется (пересечение траекторий движения судна и встречного объекта отсутствует, не выполняется условие (1)).
Из прогнозатора:
- сигналы широты и долготы точки Аn вводятся в электронную карту.
- сигнал коррекции заданного путевого угла«n» цикла «ΔПУi=n» вводят в блок программирования. Через блок программирования сигнал «Δ ПУзд.n» вводят в сумматор, где формируют корректированный сигнал заданного путевого
угла ПУзд.кор=ПУзд.+Δ ПУзд.n, который вводят в рулевой привод для изменения направления движения судна.
В момент натурального времени Т0+t1 (приход судна в точку Аn) через интервал натурального времени (сигналы формируют в вычислителе):
t1=τАсудна n.×Mτ,
где: τАсудна n - величина времени ускоренного перехода судна из начальной точки отсчета времени Т0 до точки Аn,
Мτ - масштаб ускорения времени вычислений в прогнозаторе.
- отключают сигналы широты и долготы точки Аn в электронной карте,
- отключают сигнал коррекции ΔПУзд.n в сумматоре, что позволит перейти судну к движению по заданному маршруту,
- система расхождения судна с внешним объектом переходит в исходное состояние и через интервал времени ΔT вновь получает сигналы от радара и начинает работу.
Если встречный объект появился, радар кругового обзора выдает сигналы азимута и расстояния судна до встречного объекта в вычислитель.
Сигналы вектора расстояния от судна до встречного объекта, формируемые радаром, вводят в вычислитель. В вычислитель также вводят сигналы широты, долготы и скорости хода судна из приемника СНС. В вычислителе формируют сигналы:
- широты, долготы и вектор скорости хода встречного объекта,
- траектории будущего движения судна и встречного объекта в заданной акватории,
- при наличии пересечений двух траекторий формируют сигналы времени движения судна и времени движения встречного объекта до места пересечения траекторий,
- условия столкновения.
При выполнении условия (1) повторяется описанный выше процесс.
При невыполнении условия (1) система расхождения судна с внешним объектом возвращается в исходное состояние и через интервал времени ΔT получает сигналы от радара и начинает работу вновь.
Описание работы системы расхождения судна с встречным объектом (см. чертеж)
Рассмотрим работу системы автоматического управления движением судна, дополненную системой расхождения судна с встречным объектом.
При движении судна радар кругового обзора 1 выдает сигналы азимута и расстояния судна до встречного объекта в вычислитель 2. Сигналы текущей широты, долготы и вектора скорости хода судна из приемника спутниковой навигационной системы (СНС) 3 с начального момента времени Т0 поступают на второй вход вычислителя 2. В вычислителе 2 вырабатываются сигналы:
- широты, долготы и вектор скорости хода встречного объекта,
- траекторий будущего движения судна и встречного объекта в заданной акватории,
- двух траекторий (при наличии пересечении двух траекторий будущего движения судна и встречного объекта), по которым формируют время движения судна и время движения встречного объекта до места пересечения траекторий,
- выполнения условия столкновения (если в будущий момент времени τA1 судна ±Δ встречный объект окажется на траектории движения судна в точке A1 траектории движения судна то можно утверждать, что в окрестности точки A1 произойдет столкновение судна с встречным объектом):
где τ.А1,объекта=(А0 об.(Ф0 объекта, λ0 объекта)-А1(ФА1, λА1))/Vоб,
А0 об. - текущая точка местонахождения встречного объекта,
A1(ФА1, λA1) - точка будущего нахождения встречного объекта,
Vоб - скорость хода внешнего объекта,
τ.А1судна.=(А0(Ф0, λ0)-А1(ФА1, λА1))/Vс,
А0-(Ф0,λ0) - текущая точка местонахождения судна,
A1(ФA1, λА1) - точка будущего нахождения судна,
Vс - скорость хода внешнего объекта,
Δ-var. (изменяется в диапазоне, С<Δ<+C).
При выполнении условия (1) сигналы широты и долготы точки A1 из вычислителя 2 поступают в блок программирования 6. На выходе блока программирования 6 формируется сигнал коррекции направления вектора движения судна ΔПУi=1, который поступает в прогнозатор 5. В прогнозаторе 5 в ускоренном масштабе времени вычисляются траектории движения судна и встречного объекта до будущего пересечения траекторий в точке А2 или до границ заданной акватории.
При наличии пересечения траекторий в точке А2 в прогнозаторе 5 вырабатываются сигналы времени движения судно до точки А2 «τА2судна» и встречного объекта до точки А2 «τ.А2,объекта»
τА2судна.=(А0(Ф0, λ0)-А2(ФА2, λА2))/Vс,
τ.А2,объекта=(А0 об(Ф0 об, λ0 об)-А2(ФА2, λА2))/Vоб,
где
А0-(Ф0, λ0) - текущая точка местонахождения судна,
А2(ФА2, λА2) - точка будущего нахождения судна и встречного объекта,
Vc - скорость хода судна,
А0об - текущая точка местонахождения встречного объекта,
Vоб -скорость хода встречного объекта,
Δ-var. (изменяется в диапазоне - С<Δ<+С).
В прогнозаторе 5 вычисляется выполнение условия столкновения в окрестности точки А2.:
При выполнении условия (1А2) сигналы широты и долготы точки А2 из прогнозатора 5 поступают в блок программирования 6, в котором вырабатывается сигнал коррекции вектора движения судна ΔПУi=2., этот сигнал поступает в прогнозатор 5 для третьего цикла вычислений. Аналогично рассмотренному циклу циклы ускоренных вычислений в прогнозаторе 5 повторяют до «n» цикла, когда условие столкновения (1An) перестает выполняться (точка Аn не находится на пересечении траекторий движения судна и встречного объекта или не выполняется условие (1An) будущего столкновения судна).
При этом из прогнозатора 5:
- сигнал широты и долготы точки Аn вводится в электронную карту 4.
- сигнал коррекции направления движения судна «n» цикла «ΔПУi=n» из блока программирования - 6 ΔПУзд.n поступает в сумматор 7, в котором формируется корректированный сигнал заданного путевого угла ПУзд.кор=ПУзд.+ΔПУзд.n, последний поступает в рулевой привод 8. Судно начинает менять курс для обхода встречного объекта.
Через интервал натурального времени

где τА судна n - величина времени ускоренного перехода судна из начальной точки отсчета времени Т0 до точки Аn;
Мτ - масштаб ускорения времени в прогнозаторе.
В момент натурального времени Т0+t1 вычислитель 2:
- отключает сигналы широты и долготы точки Аn в электронной карте 4,
- отключает сигнал коррекции ΔПУзд.n в сумматоре 7 через блок программирования 6, что заставит перейти судно к движению по заданному маршруту,
- переводит систему расхождения судна с встречным объектом в исходное состояние.
Через интервал времени ΔT система расхождения судна с встречным объектом получает сигналы от радара 1 и начинает работу вновь по выявлению встречного объекта, с которым возможно столкновение, и выработке минимально возможного изменения маршрута движения судна, при котором столкновение исключается.
Если встречный объект появился, радар 1 кругового обзора выдает сигналы азимута и расстояния судна до встречного объекта в вычислитель 2.
Сигналы вектора расстояния от судна до встречного объекта, формируемые радаром 1, поступают в вычислитель 2. В вычислитель 2 также вводят сигналы широты, долготы и скорости хода судна из приемника СНС 3. В вычислителе 2 формируют сигналы:
- широты, долготы и вектор скорости хода встречного объекта,
- траектории будущего движения судна и встречного объекта в заданной акватории,
- при наличии пересечении двух траекторий формируют сигналы времени движения судна и времени движения встречного объекта до места пересечения траекторий,
- условия столкновения.
При выполнении условия (1) повторяется описанный выше процесс. При невыполнении условия (1) система расхождения со встречным объектом переходит в ждущий режим и через интервал времени ΔT получает сигналы от радара 1, и система начинает работу вновь.
Проведенное моделирование рассмотренной выше системы подтвердило работоспособность предложенного способа расхождения судна с встречным объектом.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫБОРА ИСПОЛНИТЕЛЬНЫХ СРЕДСТВ В СИСТЕМЕ РАСХОЖДЕНИЯ СУДНА С ВСТРЕЧНЫМ ОБЪЕКТОМ | 2008 |
|
RU2383463C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО РАСХОЖДЕНИЯ СУДНА СО ВСТРЕЧНЫМ ОБЪЕКТОМ | 2008 |
|
RU2376194C1 |
| УСТРОЙСТВО ИСКЛЮЧЕНИЯ СТОЛКНОВЕНИЯ СУДНА С ВСТРЕЧНЫМ ДВИЖУЩИМСЯ ОБЪЕКТОМ | 2008 |
|
RU2383464C1 |
| СПОСОБ ШВАРТОВКИ СУДНА | 2006 |
|
RU2330789C1 |
| СПОСОБ ШВАРТОВКИ СУДНА | 2007 |
|
RU2350506C1 |
| СИСТЕМА ПРОГНОЗИРОВАНИЯ БЕЗОПАСНОГО РАСХОЖДЕНИЯ СУДОВ | 2020 |
|
RU2752725C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2010 |
|
RU2452655C1 |
| Система прогнозирования безопасного расхождения судов | 2022 |
|
RU2780081C1 |
| Способ и система швартовки судна | 2020 |
|
RU2747521C1 |
| СПОСОБ УПРАВЛЕНИЯ СБЛИЖЕНИЕМ КОРАБЛЯ С ПОДВИЖНОЙ ЦЕЛЬЮ | 2011 |
|
RU2467917C1 |
Изобретение относится к области судовождения - автоматическому управлению движением судна по заданному направлению с выявлением встречных объектов и расхождения с ними. В способе используют приемник спутниковой навигационной системы, вычислитель, радар, рулевой привод, сумматор системы автоматического управления движением судна и прогнозатор. В последнем формируют в ускоренном масштабе времени сигнал коррекции заданного путевого угла. Сигнал коррекции заданного путевого угла формируют в случае удовлетворения условия столкновения судна со встречным объектом, которое вырабатывают в вычислителе. Сигнал коррекции заданного путевого угла вводят в сумматор системы автоматического управления движением судна. Изобретение позволяет исключить активное участие судоводителя в процесс управления движением судна для обеспечения его расхождения со встречным объектом. 1 ил.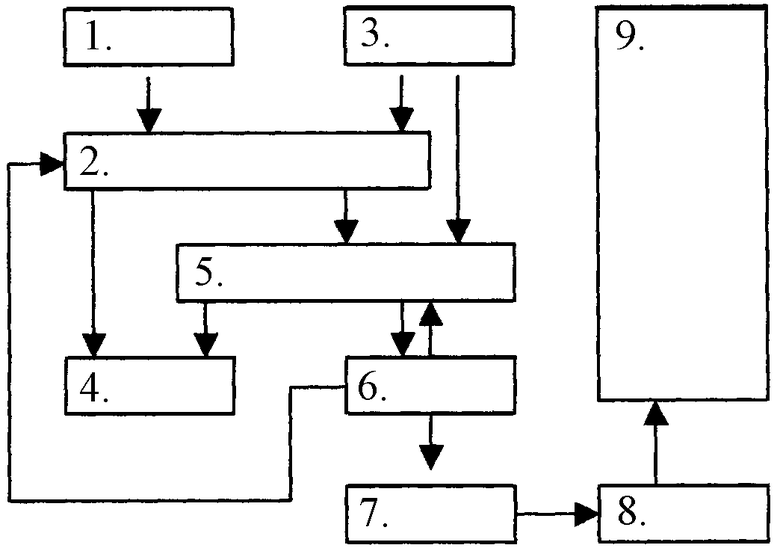
Способ расхождения судна с встречными объектами с использованием приемника спутниковой навигационной системы, рулевого привода и сумматора, на вход которого подают сигналы угла перекладки руля, текущего и заданного путевого угла, суммарный управляющий сигнал с выхода сумматора подают на вход рулевого привода, отличающийся тем, что для формирования сигнала коррекции, вводимого на вход сумматора, используют радар, прогнозатор, блок программирования и вычислитель, на вход которого подают сигналы широты, долготы и скорости хода судна из приемника спутниковой навигационной системы и сигналы вектора расстояния до встречного объекта от радара, на выходе вычислителя формируют сигналы широты, долготы и вектора скорости хода встречного объекта, а также сигнал условия столкновения судна с встречным объектом, при выполнении которого в прогнозатор вводят сигналы широты, долготы и вектор скорости хода судна из приемника спутниковой навигационной системы, а также широты, долготы и вектор скорости хода встречного объекта из вычислителя, на выходе прогнозатора с использованием блока программирования формируют сигнал коррекции путевого угла, который вводят через блок программирования и сумматор на вход рулевого привода.
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2005 |
|
RU2292289C1 |
| СПОСОБ ПРЕДСТАВЛЕНИЯ СУДОВОДИТЕЛЮ ОБОБЩЕННОЙ ИНФОРМАЦИИ ДЛЯ КОНТРОЛЯ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1992 |
|
RU2077450C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2002 |
|
RU2221728C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2003 |
|
RU2223197C1 |

