Следящая система может быть использована «ак силовой привод различных объектов с исполнительными механизмами, преобразующими или передающими значительные усилия (тихоходные двигатели, редукторы силовых приводов, опоры инерционных объектов), к которым предъявляются повышенные требования по плавности движения на малых скоростях, в частности в высококачественных следящих приводах станков, радио- И гидролокаторов и оптических телескопов.
Известны следящие системы, в которых для уведичения точности воспроизведения скорости в широком дапазоне изменения скоростей управляющих сигналов применяется отрицательная обратная связь по скорости нагрузки.
К Недостаткам известных следящих систем можно отнести наличие трения в передающих механизмах силовой части следящих систем, которое вызывает появление зоны малых скоростей, т. е. зоны «отрицательного сопротивления, вызывающего периодические остановы исполнительного двигателя при работе на малых скоростях.
Предложенная следящая система отличается тем, что с целью увеличения точности системы, повыщения устойчивости, увеличения плавности движения выход установленного на исполнительном валу тахогенератора связан со входом двух параллельно соединенных ветвей.
одна из которых выполнена в виде последовательного соединения нелинейного звена с зоной нечувствительности и усилителя, а другая - в виде последовательного соединения нелинейного звена с зоной ограничения и усилителя, а суммарный выход этих ветвей связан со входом силового привода.
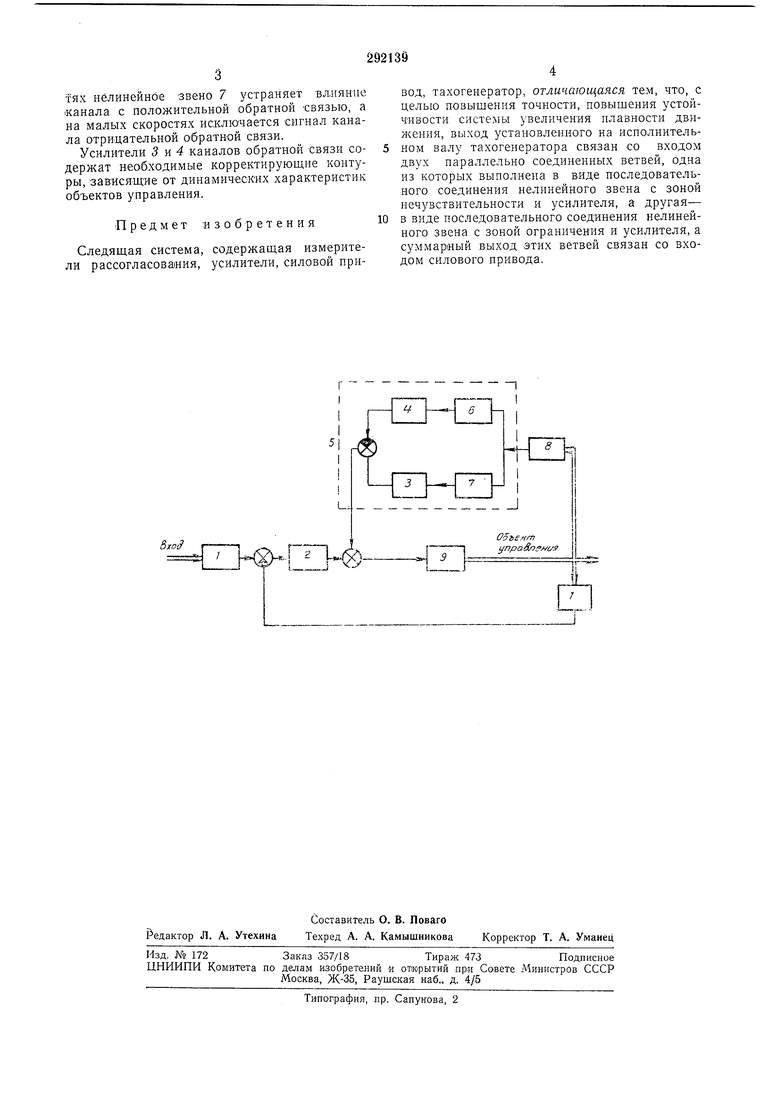
На чертеже показано предложенное устройство.
Оно содержит измерители рассогласования 1, усилители 2-4, нелинейное устройство 5 обратной связи, нелинейное звено 6 с зоной нечувствительности, нелинейное звено 7 с зоной ограничения, тахогенератор 5
и силовой привод 9.
Измерители рассогласования / и установленный на исполнительном валу тахогенератор 8 вырабатывают сигналы, с помощью которых после соответствующей коррекции в
усилителях 2-4 формируется управляющий сигнал на входе силового привода 9.
Нелинейное устройство обратной связи 5 состоит из двух параллельных каналов: канала отрицательной обратной связи, выполН6ННОГО в виде нелинейного звена 6 с зоной нечувствительности и канала положительной обратной связи, выполненного в виде нелинейного звена 7 с зоной ограничения. При таком нелинейном преобразовании
тях нелинейное звено 7 устраняет влияние канала с положительной обратной связью, а на малых скоростях исключается сигнал канала отрицательной обратной связи.
Усилители 3 и 4 каналов обратной связи содержат необходимые корректирующие контуры, зависящие от динамических характеристик объектов управления.
Предмет изобретения
Следящая система, содержащая измерители рассогласоваиия, усилители, силовой привод, тахогенератор, отличающаяся тем, что, с целью повыщения точности, повышения устойчивости системы увеличения плавности движения, выход установленного на исполнительном валу тахогенератора связан со входом двух параллельно соединенных ветвей, одна из которых выполнена в виде последовательного соединения нелинейного звена с зоной нечувствительности и усилителя, а другая- в виде последовательного соединения нелинейного звена с зоной ограничения и усилителя, а суммарный выход этих ветвей связан со входом силового привода.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В НЕЛИНЕЙНОЙ СИСТЕМЕ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2149437C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В НЕЛИНЕЙНОЙ СИСТЕМЕ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2453890C1 |
| Следящая система | 1981 |
|
SU993202A1 |
| Следящая система | 1977 |
|
SU711546A1 |
| Следящая система | 1988 |
|
SU1645938A1 |
| Следящая система | 1982 |
|
SU1109711A1 |
| Следящая система | 1980 |
|
SU883861A1 |
| Следящая система с компенсацией лифта механической передачи | 1976 |
|
SU620940A1 |
| Следящая система | 1975 |
|
SU742871A1 |
| Следящий привод | 1977 |
|
SU648945A1 |
5/(7
