L.
Изобретение относится к автоматизации промышленного оборудования, может быть использовано в точных следящих и силовых приводах для оборудования с числовым программным управлением (ЧПУ) и является усовер гаенствованием устройства по авт.св. № 114281 1..
Цель изобретения - повышение быст родействия и уменьшение колебатель- ности системы.
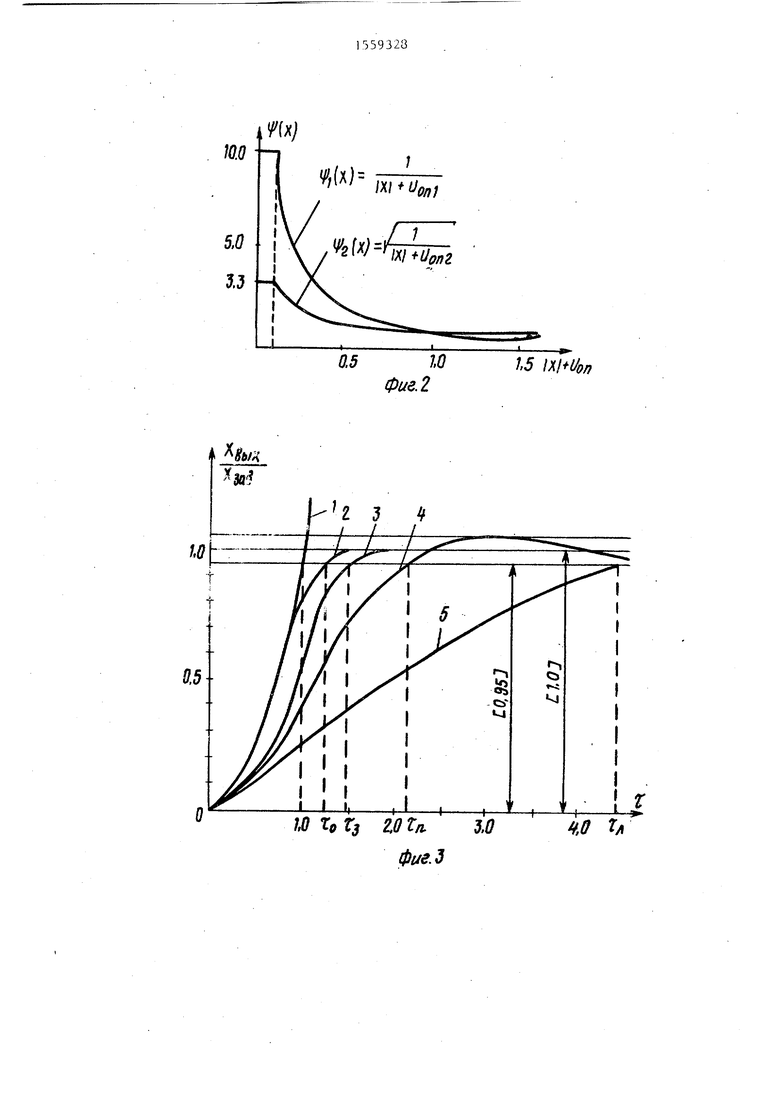
На фиг,1 изображена структурная схема предлагаемой следящей системы; на фиг.2 характеристики нелинейных блоков; на фиг.З - нормированные кри вые переходных процессов в различных типах автоматических систем, исполь- зующ их один объект регулирования; на фиг.4 электрическая структурная схема устройства (выделена штрихпунк тирной линией на фиг.1),
Структурная схема содержит последвательно соединенные задатчик 1, измеритель 2 рассогласования, сумматор 3 и усилитель 4, первый нелиней ный блок 55 первый источник 6 опорно го напряжения, второй нелинейный бло 7, второй источник 8 опорного напря™ жения, исполнительный механизм 9, с выходом которого соединены датчик 10 скорости и датчик 11 положения, а также объект 12 регулирования. На фиг.4 приведена одна из возможных технических реализаций устройства управления, построенная на аналоговы интегральных схемах и отработанная путем макетирования. Устройство выполняет функции блоков 2, 3, 5, 7, Введение новых элементов позволяет регулировать значение колебательное- ти системы. Для следящих систем необходимым требованием является устойчивость. Известно, что системы, работающие на границе устойчивости, имеют колебательные переходные процессы.
Поэтому, расширяя область устойчивости, можно обеспечивать и снижение колебательности системы. Предлагается вводить в устройство управле- ния статическое звено с характеристикой
F(x) |ср(х)|х,-(1)
и предлагаются различные варианты выбора функции tp (х) .
Между тем, предлагается введение в обратную связь функционального преобразователя
(
1
|х| + U
О х,
(2)
on
при этом If (0) --- Ј °о
U
on
5
0
5
0
5
Таким образом, за счет введения источника опорного напряжения (реализуемого гораздо проще, чем блоки перемножения) удается решить ту же задачу, что и в указанной работе с минимальными техническими затратами. Однако нелинейный преобразователь вводится только в цепь главной обратной связи. Это значит, что коэффициент главной обратной связи изменяется в процессе регулирования, в то время как коэффициент обратной связи по скорости остае-л неизменным. Следовательно, в процессе регулирования изменяется и д-мпфирование системы (поскольку оно зависит от соотношения коэффицие . ,о .) . В результате, переходный процесс является колебательным. Дополнительно вводимые в устройство блоки должны снизить колебательность.
Найдем статическую характеристику нелинейного блока 7 для объекта второго порядка (в этот класс входят, в частности, силовые электродвигатели, а также более сложные объекты, при условии отсутствия запаздываний,. инерционноетей и т.д.). Известно, что наиболее сложен для целей управления объект с нулевыми корнями (на границе устойчивости)
0
5
0
5
Хеь7 k x вх
(3)
Тогда дифференциальное уравнение замкнутой следящей системы принимает вид У УЈ-
Tt + Т-2.11
уа - У2 т7т у koc, ,
-оса
12
(4)
где.У. - ошибка слежения. Как известно, выбором значений Т4 и Т можно добиться отсутствия перерегулирования (в линейных системах). Предположим, что это возможно и в нелинейных системах, где koc и переменные. В результате приходим к схеме предлагаемого устройства.
Система работает следующим образом.
С выхода задатчика 1 напряжение U, пропорциональное заданному положению объекта 12 регулирования, поступает на первый вход измерителя 2 рассогласования. На второй вход по51
следнего поступает напряжение U с выхода нелинейного блока 5. Два напряжения U, и IL сравниваются, и на выходе измерителя 2 рассогласова- ния формируется напряжение U4, про порциональное заданной скорости исполнительного механизма 9, которое поступает на первый вход сумматора 3. На второй инверсный вход суммато- ра 3 поступает напряжение U7 с выход второго нелинейного элемента 7, фор пирующего выходное напряженке в соот ветствии с поступающим на его третий вход сигналом с выхода датчика 10 скорости, пропорциональным скорости вращения исполнительного механизма 9 Второй нелинейный блок 7 предетгвля ет собой операционный усилитель с регулируемым коэффициентом усиления; зависимость коэффициента усиления которого от суммы напряжений Uq. и иа показана на фиг.1 (кривая ty2 )«,
Б соответствии с разностью посту™ пивших напряжений U7 к U.z сумматор 3 вырабатывает управляющее напряжение для исполнительного механизма 9, ко торое поступает на вход усилителя 4. С выхода усилителя 4 напряжение U подается в якорную цепь исполнитель ного механизма 9, приводящего в дви жение обт-ект регулирования 12
На первый -,ход нелинейных блоков 5 и 7 поступает напряжение U,- с выхода усилителя 4. Для задания порого линейности нелинейных блоков 5 и 7 в систему включены источники 6 и 8 оп. рн.,го напряжения. Напряжение Ug с вьсгода источника 6 опорного напряжения поступает на второй вход перво™ го нелинейного элемента 5, а напря- жение U. с выхода источника 8 опорного напряжения поступает на второй вход второго нелинейного элемента 7,
В режиме малых отклонений при вы- полнении условия U U6 характерно- тика первого нелинейного блока 5 становится линейной,, аналогично при
U4 Ug становится линейной характеристика, второго нелийного блока 7 (фиг.2). Статические характеристики нелинейных блоков 5 и 7 показаны на фиг.2.
Характеристика первого нелинейного, блока 5 представляет собой зависи мость коэффициента передачи k5 от суммы напряжений |U4| + Ug, аналитически выражающуюся следующей формулой
Ml + U6 k,i 5
(5)
что обеспечивает линейность характеристики при малых отклонениях. Характеристика второго нелинейного блока 7 представляет собой зависимость коэффициента передачи kT от суммы напряжений Ug и выбрана таким образом, чтобы удовлетворялось соотношение -,
I
U4I+ «{
(6)
-.Величина выходного напряжения U6 источника 6 опорного напряжения выбирается равной величине коэффициента передачи kH датчика 1 положения.
т„е„ Ufi k
11
что обеспечивает еди-t
ничную главную обратную связь.
Обозначив коэффициенты передачи блоков как kj (где i - номер блока согласно фиг,1) выражение для Т и ТQ из (А) можно- записать через коэффициент передачи блоков в виде 1
m-m- (-k,k,k7k«,k,0 t i ( LI
(7)
+ ()г- 4k2kJk5k,kH/2
Чтобы минш-тзироБлть колебатель™ ность, т.е. удовлетворить требованию предъявпяемому к системе, как известно, необходимо, чтобы удовлетворялос равенство
(k3k4k7kqk Отсюда
)- 4k2k,k5k9k 0
0.
.jk (k7k, У
-k,
С, (8)
где ь - постоянная, зависящая от па
2
сие темы следующим , k3k4kekfo
образом
(9)
Выбирая k в соответствии с соотношением (7), становится возможным устранить колебательность в системе, что является очень важным для ряда практически важных объектов управления. Введение нелинейного блока 5 в обратную связь по скорости выгодно отличает предлагаемую следящую систему от известной, так как при этом повышается качество регулирования (сведено до минимума перерегулирование).
Для доказательства существования положительного эффекта и сравнения процессов в линейных и нелинейных системах было выполнено математическое моделирование ряда автоматических систем. Моделирование выполнено на ЭВМ СМ-3 по методу Рунге-Кутта с
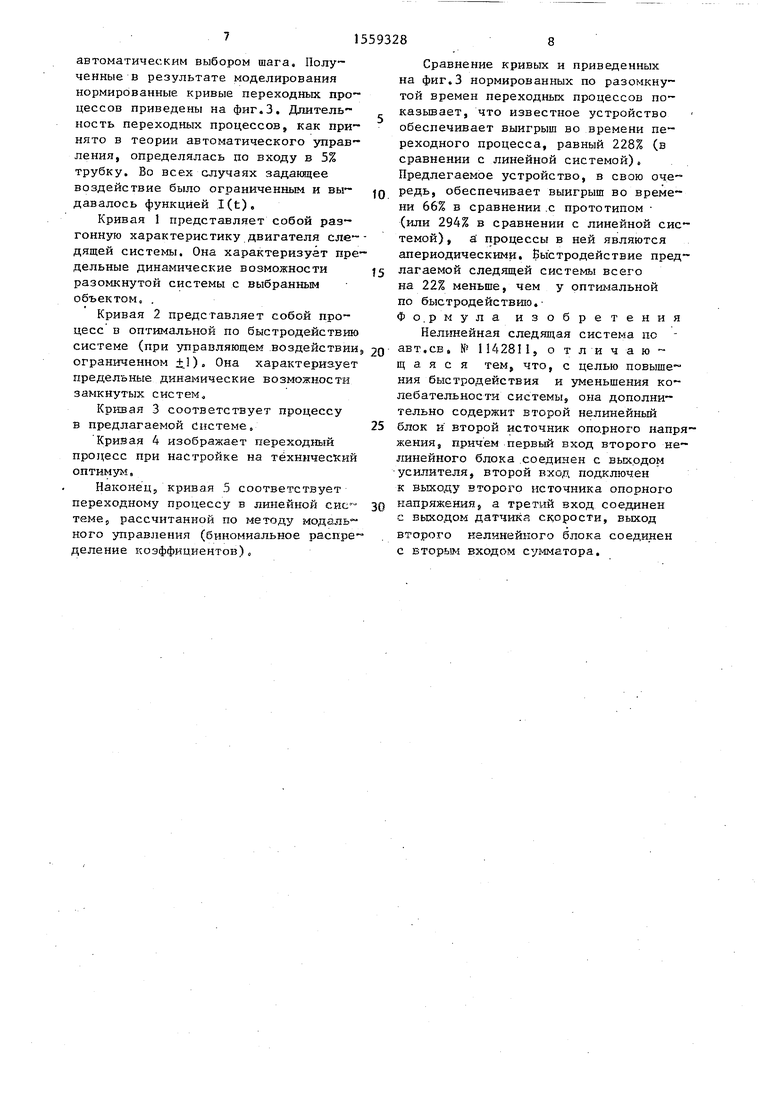
автоматическим выбором шага. Полу™ ченные в результате моделирования нормированные кривые переходных про- цессов приведены на фиг.З. Длитель ность переходных процессов, как при- нято в теории автоматического управления, определялась по входу в 5% трубку. Во всех случаях задающее воздействие было ограниченным и вы- давалось функцией I(t).
Кривая 1 представляет собой раз- гонную характеристику двигателя еле- дящей системы. Она характеризует пре дельные динамические возможности разомкнутой системы с выбранным объектом. .
Кривая 2 представляет собой процесс в оптимальной по быстродействию системе (при управляющем воздействии ограниченном +.1). Она характеризует предельные динамические возможности замкнутых систем.
Кривая 3 соответствует процессу в предлагаемой системе
Кривая 4 изображает переходный процесс при настройке на технический оптимум,
Наконец, кривая 5 соответствует переходному процессу в линейной сис теме, рассчитанной по методу модэль- ного управления (биномиальное распре- деление коэффициентов).
Сравнение кривых и приведенных на фиг.З нормированных по разомкну™ той времен переходных процессов показывает, что известное устройство обеспечивает выигрыш во времени переходного процесса, равный 228% (в сравнении с линейной системой)г Предлегаемое устройство, в свою оче редь, обеспечивает выигрыш во времени 66% в сравнении с прототипом (или 294% в сравнении с линейной системой), а процессы в ней являются апериодическими. Быстродействие предлагаемой следящей системы всего на 22% меньше, чем у оптимальной по быстродействию. Формула изобретения
Нелинейная следящая система по авт.ев, № 1142811, отличающаяся тем, что, с целью повыше ния быстродействия и уменьшения колебательности системы, она дополнительно содержит второй нелинейный блок и второй источник опорного напржения, причем первый вход второго нелинейного блока соединен с выходом усилителя, второй вход подключен к выходу второго источника опорного напряжения;, а третий вход соединен с выходом датчика скорости, выход
второго нелинейного блока соединен с вторым входом сумматора.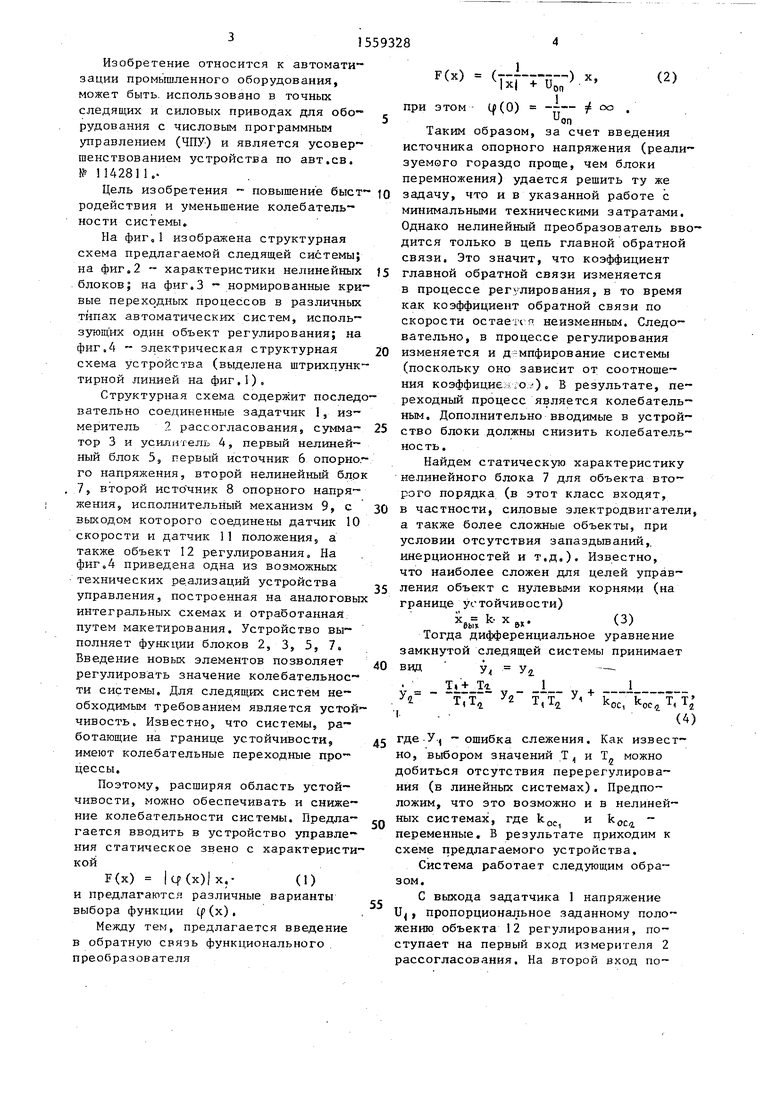

| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1983 |
|
SU1142811A1 |
| Следящая система | 1982 |
|
SU1109711A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В НЕЛИНЕЙНОЙ СИСТЕМЕ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2149437C1 |
| Нелинейное корректирующее устройство | 1989 |
|
SU1734070A1 |
| Нелинейное корректирующее устройство | 1983 |
|
SU1126925A1 |
| Следящая система | 1987 |
|
SU1425595A1 |
| Автоматический регулятор отношения сигналов | 1985 |
|
SU1273876A1 |
| Система регулирования турбины | 1980 |
|
SU918452A1 |
| Устройство управления вибрационным источником сейсмических сигналов | 1977 |
|
SU661460A1 |
| Преобразователь мощности в напряжение постоянного тока | 1982 |
|
SU1092419A2 |
Изобретение относится к автоматизации промышленного оборудования и может быть использовано в точных следящих и силовых приводах. Целью изобретения является повышение быстродействия и уменьшение колебательности системы. Нелинейная следящая система содержит задатчик 1, измеритель 2 рассогласования, сумматор 3, усилитель 4, первый 5 и второй 7 нелинейные блоки, первый 6 и второй 8 источники опорного напряжения, исполнительный механизм 9, датчики скорости 10 и положения 11 и объект 12 регулирования. Цель достигается за счет соответсвующего выбора статической характеристики второго нелинейного блока 7 и второго источника опорного напряжения 8. 4 ил.
0.5W
Фиг. 2
Xfa #
И
/,,0 TO TJ гл
фие.З
1,5 l+Uon
Ъ-Q
4,0 Ь
| Следящая система | 1983 |
|
SU1142811A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
