Изобретение относится к машиностроению, а конкретно к кулачковым механизмам.
Известен трехзвенный кулачковый механизм [1, стр.32, рисунок 38]. В этом механизме вращающийся кулачок воздействует на ролик поступательно движущегося толкателя. В таком механизме толкатель непосредственно взаимодействует с кулачком, что уменьшает его технические возможности.
Наиболее близким к заявляемому техническому решению является четырехзвенный кулачковый механизм [2, стр.78, рисунок 799], состоящий из тяги, соединенной с кулачком вращательной кинематической парой; кулачка, установленного на стойке и входящего во вращательную кинематическую пару с тягой и в две высшие кинематические пары с коромыслом; коромысла, вращающегося вокруг стойки.
Недостатком такого механизма является неопределенность движения тяги относительно стойки, так как она связана одной кинематической парой-шарниром с кулачком и никак не связана со стойкой.
Задачей предлагаемого изобретения является обеспечение связи тяги со стойкой, что позволит обеспечить перемещение выходного звена в зависимости как от профиля кулачка, так и от профиля промежуточного звена.
Сущность предлагаемого технического решения заключается в том, что предлагается четырехзвенный кулачковый механизм, содержащий подвижные кулачок, тягу и промежуточное звенья, а также стойку, при этом тяга механизма соединена со стойкой в поступательную кинематическую пару, а промежуточное звено выполнено свободным от соединения со стойкой и входит с кулачком в две высшие кинематические нары.
На чертеже изображен предлагаемый четырехзвенный кулачковый механизм, состоящий из кулачка 1, промежуточного звена 2, тяги 3 и стойки 0. Кулачок 1 образует со стойкой 0 вращательную кинематическую пару (0-1), тяга 3 образует со стойкой 0 поступательную кинематическую пару (0-3), а промежуточное звено 2 входит с тягой 3 во вращательную кинематическую пару (2-3) и с кулачком 1 в две высшие кинематические нары (2-1)1 и (2-1)2. Буквой А обозначена точка, относительно которой осуществляется вращение кулачка, а именно поворот кулачка на угол φ. Буквами хх обозначена прямая, вдоль которой происходит перемещение S тяги.
Работает четырехзвенный кулачковый механизм следующим образом.
Кулачок поворачивается на некоторый угол φ относительно точки А. Движение передается второму звену за счет высших кинематических пар (2-1)1 и (2-1)2. Плоскопараллельно движущееся звено 2, в свою очередь, передает полученное движение тяге 3, которая в результате получает перемещение S вдоль оси х-х. За счет того, что тяга механизма соединяется со стойкой в поступательную кинематическую пару, она приобретает функцию толкателя.
Предлагаемый четырехзвенный кулачковый механизм относится к механизмам третьего семейства по Артоболевскому И.И., то есть к плоским механизмам, подвижность которых определяется формулой Чебышева П.Л. [2, стр.77]

где W - подвижность механизма,
n - число подвижных звеньев,
p5 - число одноподвижных кинематических пар,
р4 - число высших двухподвижных кинематических пар.
В предложенном механизме n=3 (подвижные звенья 1, 2 и 3), p5=3 (кинематические пары 0-1, 0-3 и 2-3), p4=2 (высшие кинематические пары (2-1)1 и (2-1)2), и тогда по формуле 1 получим
W=3·3-2·3-2=1,
откуда следует, что если задать звену 1 движение, то звенья 2 и 3 получат также вполне определенные движения.
Источники информации
1. Артоболевский И.И. Теория механизмов. - М.: Наука, 1967, 720 с.
2. Артоболевский И.И. Механизмы в современной технике. Справочник, Т.IV. - М.: Наука, 1975, 448 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧЕТЫРЕХЗВЕННЫЙ КУЛАЧКОВЫЙ МЕХАНИЗМ С ИЗМЕНЯЕМЫМ ПРОМЕЖУТОЧНЫМ ЗВЕНОМ | 2013 |
|
RU2533369C2 |
| Пятизвенный кулачковый механизм | 2016 |
|
RU2632620C1 |
| ЧЕТЫРЕХЗВЕННЫЙ РЕДУКТОР ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ | 2005 |
|
RU2295080C1 |
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В ПРЕРЫВИСТОЕ ВРАЩАТЕЛЬНОЕ И ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ | 1999 |
|
RU2180946C2 |
| ПРОСТРАНСТВЕННЫЙ ШАРНИРНЫЙ ЧЕТЫРЕХЗВЕННИК | 2010 |
|
RU2446331C1 |
| Механизм с перекатывающимся рычагом | 2016 |
|
RU2610142C1 |
| ПРОСТРАНСТВЕННЫЙ ЧЕТЫРЁХЗВЕННЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 2014 |
|
RU2557322C1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2005 |
|
RU2303519C1 |
| ПРОСТРАНСТВЕННЫЙ КРИВОШИПНО-ШАТУННЫЙ МЕХАНИЗМ ВТОРОГО СЕМЕЙСТВА | 2010 |
|
RU2422703C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 2018 |
|
RU2673118C1 |
Изобретение относится к машиностроению, а конкретно к кулачковым механизмам. Кулачковый механизм состоит из кулачка, промежуточного звена, тяги и стойки. Кулачок образует со стойкой вращательную кинематическую пару. Тяга образует со стойкой поступательную кинематическую пару. Промежуточное звено входит с тягой во вращательную кинематическую пару, а с кулачком - в две высшие кинематические пары. Техническим результатом является обеспечение перемещения выходного звена в зависимости как от профиля кулачка, так и от профиля промежуточного звена. 1 ил.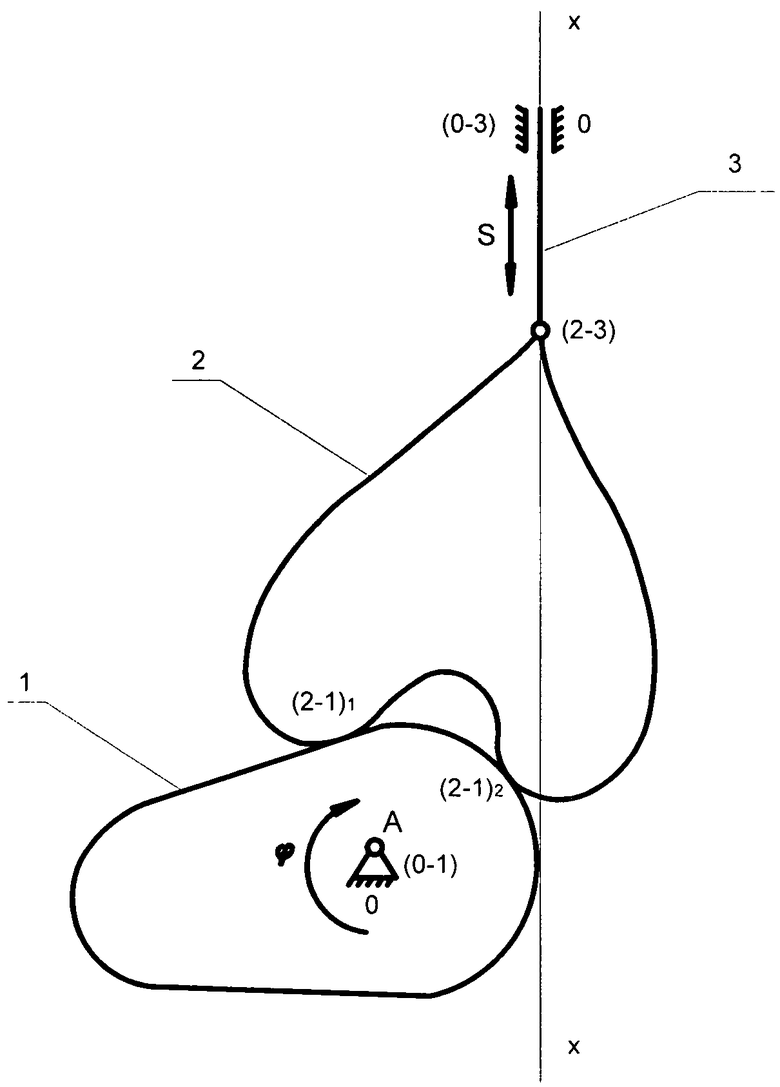
Четырехзвенный кулачковый механизм, содержащий подвижные кулачок, тягу и промежуточное звенья, а также стойку, отличающийся тем, что тяга механизма соединена со стойкой в поступательную кинематическую пару, а промежуточное звено выполнено свободным от соединения со стойкой и входит с кулачком в две высшие кинематические пары.
| Кожевников С.Н | |||
| Теория механизмов и машин | |||
| Учебное пособие для студентов вузов | |||
| Изд | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| - М.: Машиностроение, 1973, с.167-168, рис.8.1 | |||
| Кореняко А.С | |||
| Теория механизмов и машин | |||
| Издательское объединение «Вища школа», 1976, с.20, 21, 128, 129, рис.21, 143 | |||
| Артоболевский И.И | |||
| Механизмы в современной технике | |||
| Том V Кулачковые и | |||

