Изобретение относится к машиностроению, а конкретно к кулачковым механизмам.
Известен трехзвенный кулачковый механизм [1, стр.32, рисунок 38]. В этом механизме вращающийся кулачок передает движение поступательно движущемуся толкателю. В таком механизме толкатель непосредственно взаимодействует с кулачком, что исключает возможность изменения закона движения толкателя.
Наиболее близким к заявляемому техническому решению является четырехзвенный кулачковый механизм [2], состоящий из кулачка, промежуточного звена, выполненного свободным от соединения со стойкой, толкателя, а также стойки.
Недостатком такого механизма является невозможность регулирования угла и расстояния между опорами промежуточного звена и, следовательно, невозможность регулирования закона движения толкателя.
Задачей предлагаемого механизма является обеспечение возможности регулирования угла и расстояния между опорами изменяемого промежуточного звена, что позволит управлять законом движения толкателя.
Сущность предлагаемого технического решения заключается в том, что предлагается четырехзвенный кулачковый механизм с изменяемым промежуточным звеном, содержащий подвижные кулачок, толкатель, изменяемое промежуточное звено, а также стойку, при этом опоры изменяемого промежуточного звена выполнены с возможностью их относительного смещения и фиксации с помощью клеммовых соединений.
На фиг.1 изображен предлагаемый четырехзвенный кулачковый механизм с изменяемым промежуточным звеном. На фиг.2 изображено клеммовое соединение. Механизм состоит из кулачка 1, изменяемого промежуточного звена 2, толкателя 3 и стойки 0. Кулачок 1 образует со стойкой 0 вращательную кинематическую пару (0-1), толкатель 3 образует со стойкой 0 поступательную кинематическую пару (0-3), изменяемое промежуточное звено 2, содержащее в своем составе клеммовые соединения (2-2/) и (2-2//) с составными элементами 2/ и 2//, входит с толкателем 3 во вращательную кинематическую пару (2-3) и с кулачком 1 в две высшие кинематические пары (2/-1) и (2//-1). Буквой A обозначена точка, относительно которой осуществляется вращение кулачка, а именно поворот кулачка на угол φ. Буквами xx обозначена прямая, вдоль которой происходит перемещение S толкателя, α - регулируемый угол между опорами изменяемого промежуточного звена 2, h - регулируемое расстояние между центрами роликов изменяемого промежуточного звена 2. На фигуре 2 изображено клеммовое соединение.
Работает четырехзвенный кулачковый механизм с изменяемым промежуточным звеном следующим образом. С помощью клеммовых соединений (2-2/) и (2-2//) осуществляется регулирование и фиксация угла α между опорами и расстояния h между центрами роликов изменяемого промежуточного звена 2. При вращении кулачка 1 относительно точки A, движение передается промежуточному звену 2 через высшие кинематические пары (2/-1) и (2//-1). Плоскопараллельное движущееся промежуточное звено 2, в свою очередь, передает движение толкателю 3, который в результате получает перемещение S вдоль оси xx.
Предлагаемый четырехзвенный кулачковый механизм с изменяемым, промежуточным звеном относится к механизмам третьего семейства по Артоболевскому И.И., то есть к плоским механизмам, подвижность которых определяется развернутой формулой Чебышева П.Л. [1, стр.77]

где W - подвижность механизма,
n - число подвижных звеньев,
p5 - число одноподвижных кинематических пар,
p4 - число двухподвижных кинематических пар.
В предлагаемом механизме n=3 (подвижные звенья 1, 2 и 3), p5=3 (кинематические пары (0-1), (0-3) и (2-3)), p4=2 (кинематические пары (2/-1) и (2//-1)), и тогда по формуле (1) получим
W=3·3-2·3-2=1,
откуда следует, что если задать звену 1 движение, то все остальные звенья получат вполне определенные движения.
Источники информации
1. Артоболевский И.И. Теория механизмов. Москва, «Наука», 1967, 720 с.
2. Патент №2456491. Четырехзвенный кулачковый механизм / Дворников Л.Т., Ермолаева Н.Ю. - №2010145405; Приоритет 08.11.2010; опубл. 20.07.2012, Бюл. №20.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧЕТЫРЕХЗВЕННЫЙ КУЛАЧКОВЫЙ МЕХАНИЗМ | 2010 |
|
RU2456491C1 |
| Пятизвенный кулачковый механизм | 2016 |
|
RU2632620C1 |
| ОДНОСАТЕЛЛИТНАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА | 2014 |
|
RU2576215C1 |
| ПРОСТРАНСТВЕННЫЙ ЧЕТЫРЁХЗВЕННЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 2014 |
|
RU2557322C1 |
| ПЯТИЗВЕННЫЙ РЕДУКТОР ПОВОРОТНОГО ДВИЖЕНИЯ | 2009 |
|
RU2407932C1 |
| МЕХАНИЗМ С ПЕРЕКАТЫВАЮЩИМСЯ РЫЧАГОМ | 2012 |
|
RU2514322C1 |
| ПРОСТРАНСТВЕННЫЙ ШАРНИРНЫЙ ЧЕТЫРЕХЗВЕННИК | 2010 |
|
RU2446331C1 |
| КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ШАТУНОМ | 2011 |
|
RU2450186C1 |
| ПРОСТРАНСТВЕННЫЙ КРИВОШИПНО-ШАТУННЫЙ МЕХАНИЗМ ВТОРОГО СЕМЕЙСТВА | 2010 |
|
RU2422703C1 |
| ПРОСТРАНСТВЕННЫЙ ЧЕТЫРЁХЗВЕННЫЙ ВИНТО-РЫЧАЖНЫЙ МЕХАНИЗМ | 2015 |
|
RU2595101C1 |
Изобретение относится к машиностроению, а конкретно к кулачковым механизмам. В четырехзвенном кулачковом механизме с изменяемым промежуточным звеном, содержащем подвижные кулачок, толкатель, изменяемое промежуточное звено, а также стойку, опоры изменяемого промежуточного звена выполнены с возможностью их относительного смещения и фиксации с помощью клеммовых соединений. Достигается управление законом движения толкателя. 2 ил.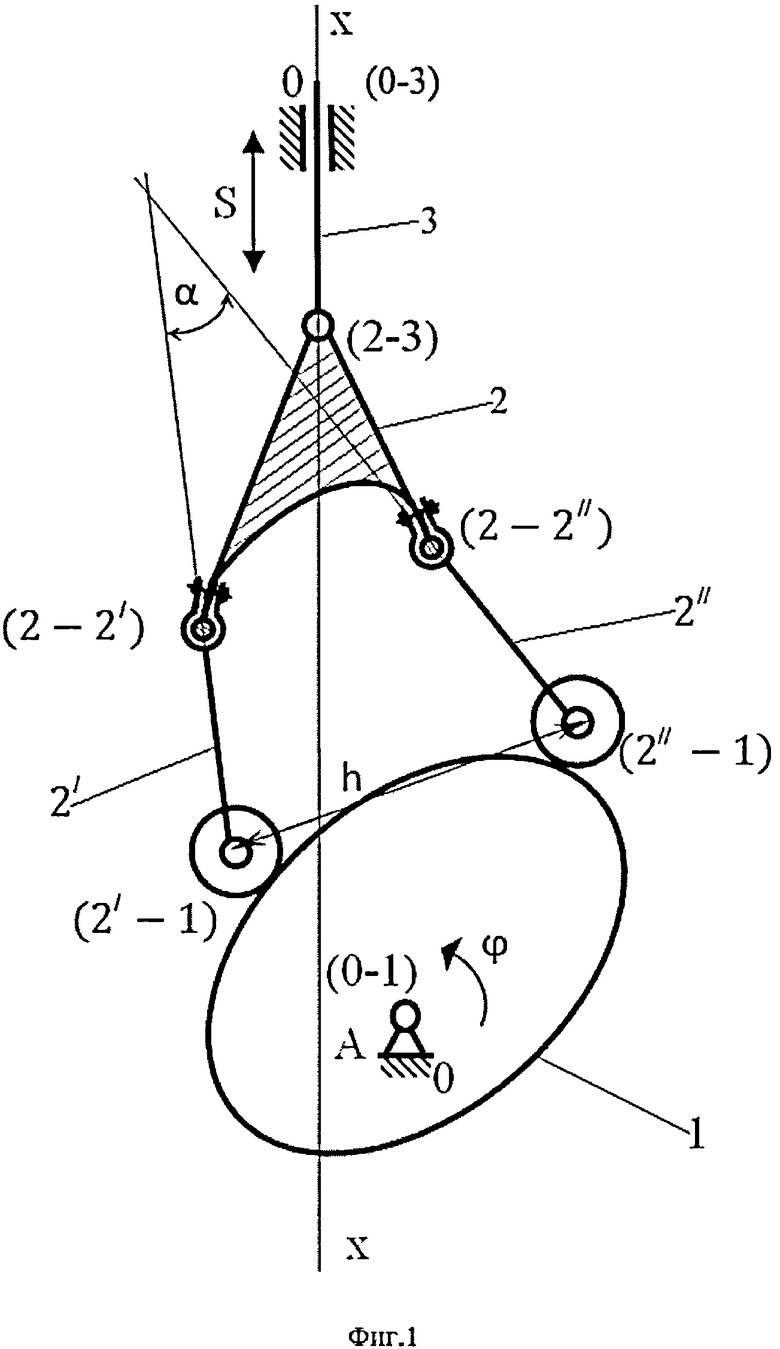
Четырехзвенный кулачковый механизм с изменяемым промежуточным звеном, содержащий подвижные кулачок, толкатель, изменяемое промежуточное звено, а также стойку, отличающийся тем, что опоры изменяемого промежуточного звена выполнены с возможностью их относительного смещения и фиксации с помощью клеммовых соединений.
| ЧЕТЫРЕХЗВЕННЫЙ КУЛАЧКОВЫЙ МЕХАНИЗМ | 2010 |
|
RU2456491C1 |
| УСТРОЙСТВО для УМЕНЬШЕНИЯ ГИДРОДИНАМИЧЕСКИХ | 0 |
|
SU273671A1 |
| Артоболевский И.И | |||
| "Механизмы в современной технике", том V | |||
| Кулачковые и фрикционные механизмы | |||
| Механизмы с гибкими звеньями- М.: Наука, 1981, с.20, механизмы 2816, 2817 | |||
| Шарнирно-рычажный механизм | 1986 |
|
SU1368547A1 |

