Изобретение относится к машиностроению, а конкретно к кулачковым механизмам.
Известен трехзвенный кулачковый механизм [1, стр. 32, рисунок 38]. В этом механизме вращающийся кулачок передает движение поступательно движущемуся толкателю. В таком механизме толкатель непосредственно взаимодействует с кулачком, что исключает возможность изменения закона движения толкателя.
Наиболее близким к заявляемому техническому решению является принятый за прототип четырехзвенный кулачковый механизм [2], состоящий из кулачка, трехпарного промежуточного звена, выполненного свободным от соединения со стойкой, толкателя, и стойки. Такой механизм позволяет получать движение толкателя с неоднократно изменяющимся законом за время полного оборота кулачка.
Задачей предлагаемого механизма является увеличение возможности плоского кулачкового механизма по сравнению с прототипом, за счет введения второго трехпарного промежуточного звена, взаимодействующего с кулачком, которое корректировало бы закон движения толкателя.
Сущность нового технического решения заключается в том, что предлагается пятизвенный кулачковый механизм, содержащий подвижный кулачок, трехпарное промежуточное звено и толкатель, в котором дополнительно установлено второе трехпарное промежуточное звено, входящее во вращательные пары с первым промежуточным звеном и с толкателем, а третьей высшей кинематической парой с кулачком.
При этом толкатель механизма соединен со стойкой в поступательную кинематическую пару, а трехпарные промежуточные звенья выполнены свободными от соединения со стойкой.
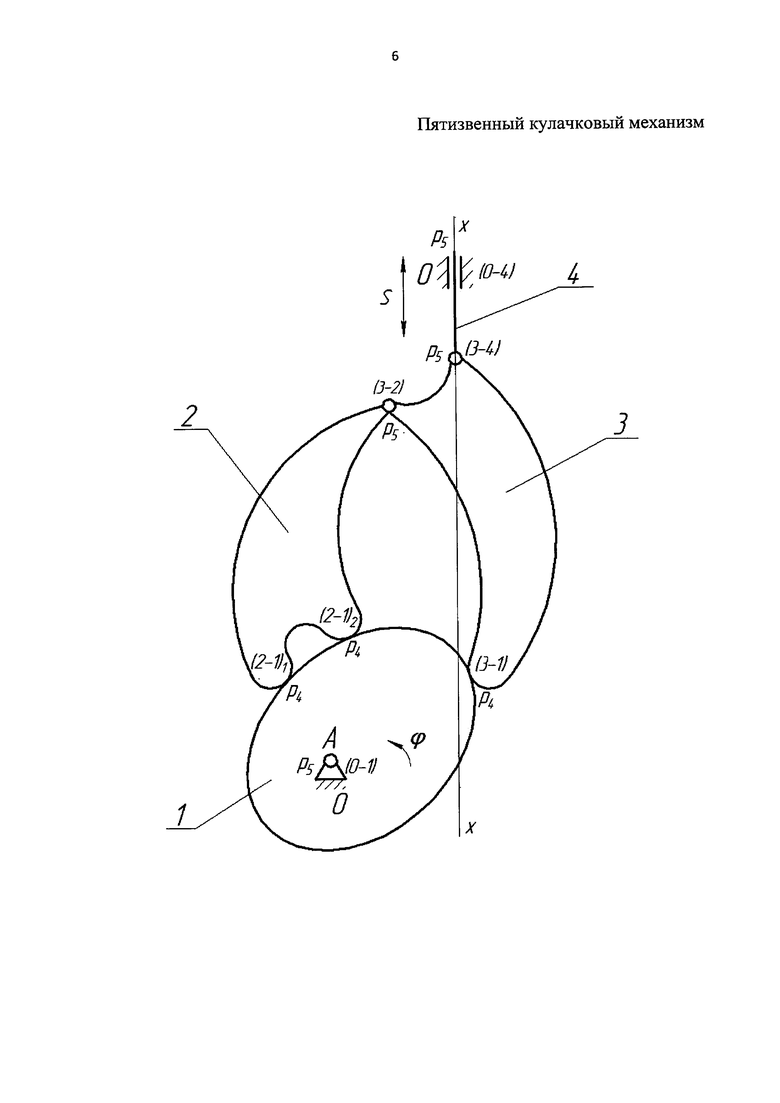
На чертеже изображен предлагаемый пятизвенный кулачковый механизм. Механизм состоит из кулачка 1, трехпарных промежуточных звеньев 2 и 3, толкателя 4 и стойки 0. Кулачок 1 образует со стойкой 0 вращательную кинематическую пару (0-1), толкатель 4 образует со стойкой 0 поступательную кинематическую пару (0-4), а также входит во вращательную кинематическую пару (3-4) с трехпарным промежуточным звеном 3. Трехпарное промежуточное звено 2 образует с кулачком 1 две высшие кинематические пары (2-1)1 и (2-1)2 и одну вращательную пару (3-2) с трехпарным промежуточным звеном 3. Трехпарное промежуточное звено 3 с кулачком 1 образует высшую кинематическую пару (3-1). Буквой А обозначена точка, относительно которой осуществляется вращение кулачка, а именно поворот кулачка на угол ϕ. Буквами хх обозначена прямая, вдоль которой происходит перемещение S толкателя.
Работает пятизвенный кулачковый механизм следующим образом. Кулачок поворачивается на некоторый угол ϕ относительно точки А. Движение передается второму и третьему трехпарным промежуточным звеньям за счет высших кинематических пар (2-1)1, (2-1)2 и (3-1) соответственно. Плоскопараллельно движущиеся трехпарные промежуточные звенья 2 и 3, в свою очередь, передают движение толкателю 4, который получает перемещение S вдоль оси хх.
Предлагаемый пятизвенный кулачковый механизм относится к механизмам третьего семейства по Артоболевскому И.И., то есть к плоским механизмам, подвижность которых определяется развернутой формулой Чебышева П.Л. [1, стр. 77]

где W - подвижность механизма,
n - число подвижных звеньев,
р5 - число одноподвижных кинематических пар,
р4 - число двухподвижных кинематических пар.
В предлагаемом механизме n=4 (подвижные звенья 1, 2, 3 и 4), р5=4 (кинематические пары (0-1), (0-4), (3-2) и (3-4)), р4=3 (кинематические пары (2-1)1, (2-1)2, и (3-1)), и тогда по формуле (1) получим
W=3⋅4-2⋅4-3=1,
откуда следует, что если задать звену 1 движение, то все остальные звенья получат вполне определенные движения.
Источники информации
1. Артоболевский И.И. Теория механизмов. Москва, «Наука», 1967, 720 с.
2. Патент №2456491. Четырехзвенный кулачковый механизм / Дворников Л.Т., Ермолаева Н.Ю. - №2010145405; Приоритет 08.11.2010; опубл. 20.07.2012, Бюл. №20.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧЕТЫРЕХЗВЕННЫЙ КУЛАЧКОВЫЙ МЕХАНИЗМ | 2010 |
|
RU2456491C1 |
| ЧЕТЫРЕХЗВЕННЫЙ КУЛАЧКОВЫЙ МЕХАНИЗМ С ИЗМЕНЯЕМЫМ ПРОМЕЖУТОЧНЫМ ЗВЕНОМ | 2013 |
|
RU2533369C2 |
| ПЯТИЗВЕННЫЙ РЕДУКТОР ПОВОРОТНОГО ДВИЖЕНИЯ | 2009 |
|
RU2407932C1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2005 |
|
RU2303519C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2179505C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2179108C1 |
| САМОУСТАНАВЛИВАЮЩАЯСЯ ПЯТИСАТЕЛЛИТНАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА | 2018 |
|
RU2701296C1 |
| САМОУСТАНАВЛИВАЮЩАЯСЯ ШЕСТИСАТЕЛЛИТНАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА | 2017 |
|
RU2662604C1 |
| Механизм с перекатывающимся рычагом | 2016 |
|
RU2610142C1 |
| ПРОСТРАНСТВЕННЫЙ ЧЕТЫРЕХЗВЕННЫЙ МЕХАНИЗМ | 2012 |
|
RU2513776C1 |
Изобретение относится к области машиностроения, а конкретно к кулачковым механизмам. Кулачковый механизм содержит подвижный кулачок, толкатель, трехпарные промежуточные звенья и стойку. Второе трехпарное промежуточное звено входит во вращательные пары с первым промежуточным звеном и с толкателем, а третьей высшей кинематической парой с кулачком. Толкатель механизма соединен со стойкой в поступательную кинематическую пару. Трехпарные промежуточные звенья выполнены свободными от соединения со стойкой. Достигается расширение функциональных возможностей. 1 ил. 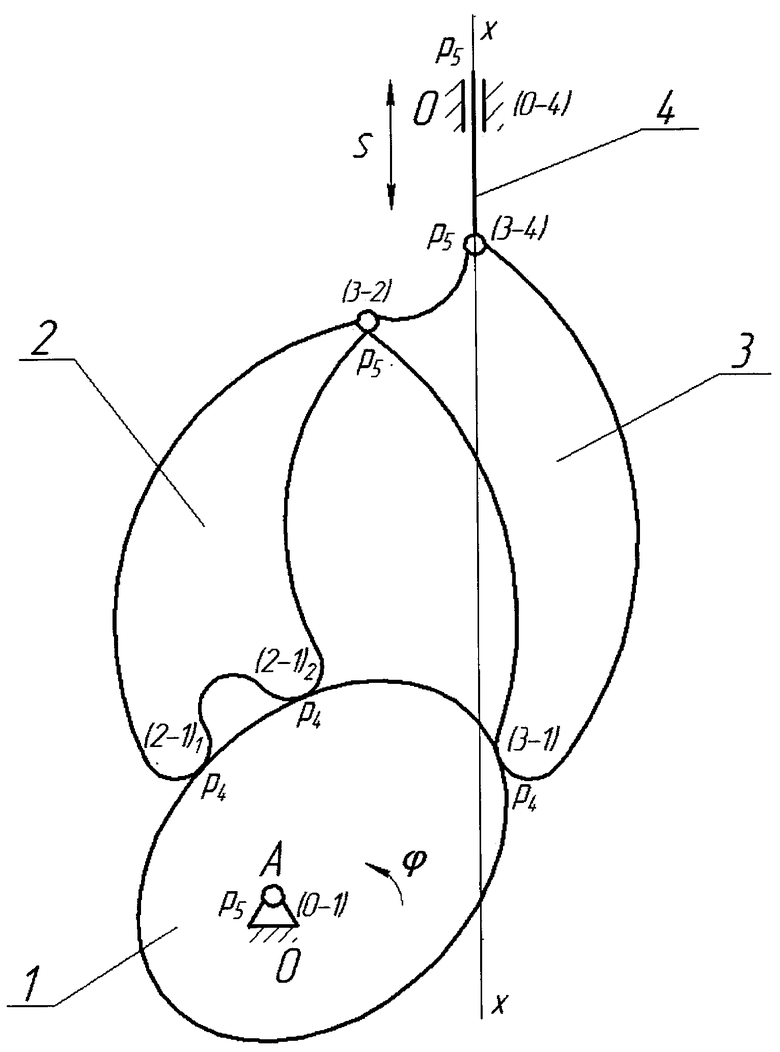
Кулачковый механизм, содержащий подвижный кулачок, трехпарное промежуточное звено и толкатель, отличающийся тем, что в нем дополнительно установлено второе трехпарное промежуточное звено, входящее во вращательные пары с первым промежуточным звеном и с толкателем, а третьей высшей кинематической парой с кулачком.
| Артоболевский И.И | |||
| "Механизмы в современной технике", 2-е изд., переработанное | |||
| т | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Способ закалки пил | 1915 |
|
SU140A1 |
| Деревянный коленчатый рычаг | 1919 |
|
SU150A1 |
| Приспособление к крутильным ватерам для останова подачи нити при ее обрыве | 1925 |
|
SU3037A1 |
| Вага для выталкивания костылей из шпал | 1920 |
|
SU161A1 |
| СМАЗОЧНЫЙ АППАРАТ | 1916 |
|
SU3055A1 |
| ЧЕТЫРЕХЗВЕННЫЙ КУЛАЧКОВЫЙ МЕХАНИЗМ | 2010 |
|
RU2456491C1 |
| УСТРОЙСТВО для УМЕНЬШЕНИЯ ГИДРОДИНАМИЧЕСКИХ | 0 |
|
SU273671A1 |

