Изобретение относится к силовому винтоверту согласно ограничительной части независимого пункта формулы изобретения.
В DE 2326027 А приведено описание работающего от сети винтоверта, который обеспечивает заданное номинальное значение крутящего момента. Создаваемый винтовертом крутящий момент опосредованно измеряется на основании проходящего через электродвигатель тока. При этом вследствие подключения к сети исходят из рабочего напряжения электродвигателя, которое всегда одинаково и постоянно. Если еще не достигнуто номинальное значение крутящего момента, то винтоверт вращается с максимально возможной скоростью вращения, которая зависит от номинального значения подлежащего созданию крутящего момента. Вследствие инерции вращающихся частей винтоверта, таких как электродвигатель и особенно передача, винтовое соединение в зависимости от выбега продолжает вращаться и после достижения номинального значения крутящего момента.
Возникающие в DE 2326027 А1 проблемы вследствие дальнейшего вращения винтоверта при достижении номинального значения крутящего момента должны преодолеваться с помощью решения согласно DE 10341975 А1. Здесь приводится описание электронного устройства ограничения крутящего момента для электродвигателя, используемого, например, в работающем от аккумулятора винтоверте. При этом исходят из электронного ограничения крутящего момента, при котором проходящий через электродвигатель ток используется в качестве меры крутящего момента. Такой способ называется неточным, поскольку, в частности, при высоких скоростях вращения после выключения электродвигателя за счет кинетической энергии вращающихся масс может возникать выбег, который приводит к тому, что винтовое соединение затягивается с более высоким крутящим моментом, чем номинальный крутящий момент. Для предотвращения основанного на инерции, соответственно, динамике передачи пика крутящего момента предложено устанавливать максимальное значение допустимого тока электродвигателя в зависимости от скорости вращения электродвигателя. Согласно одному примеру выполнения, можно устанавливать заданное номинальное значение крутящего момента, которое пересчитывается в максимальное значение тока электродвигателя. Чем выше задано максимальное значение тока электродвигателя, тем меньше может быть максимальная скорость вращения электродвигателя.
В ЕР 0187353 А2 приведено описание винтоверта, электродвигатель которого питается от сети переменного тока. При этом исходят из того, что электродвигатель создает максимальный и определенный крутящий момент под нагрузкой при остановке, причем этот крутящий момент зависит от подаваемого напряжения, соответственно, тока нагрузки в соответствии с характеристиками электродвигателя. Номинальное значение крутящего момента завинчивания достигается при небольшой скорости вращения или даже при остановке винтоверта, так что предотвращается превышение номинального значения крутящего момента за счет выбега.
Имеется также схема компенсации, которая способна выравнивать колебания напряжения сети для исключения влияния на фактическое значение крутящего момента. При падающем напряжении питания увеличивается фазовый угол управления симметричным триодным тиристором, так что на электродвигатель подается более высокое среднее напряжение.
В DE 19626731 А1 приведено описание работающего от аккумулятора небольшого винтоверта, который имеет переключательный элемент, который выключает электродвигатель посредством короткого замыкания. Переключательный элемент приводится в действие с помощью ограничителя глубины хода. За счет резкого торможения электродвигателя уменьшается перерегулирование. Однако при этом следует учитывать, что такое короткое замыкание электродвигателя возможно лишь при сравнительно небольших отдаваемых крутящих моментах до, например, 100 Нм и при электродвигателях небольшой мощности, поскольку даже при электродвигателях небольшой мощности в случае короткого замыкания вращающегося с высокой скоростью электродвигателя необходимо ожидать значительного тока короткого замыкания и связанных с ним электромагнитных помех. Ток короткого замыкания значительно нагружает как коллектор реализованного в виде двигателя постоянного тока электродвигателя, так и используемый переключательный элемент для короткого замыкания электродвигателя.
В DE 10345135 А1 приведено описание работающего от аккумулятора винтоверта, который содержит для электроснабжения литиевый ионный аккумулятор.
В полезной модели DE 20113184 U1 и, например, в DE 19647813 А1 указаны выполненные в виде ручного инструмента, приводимые в действие с помощью электродвигателя винтоверты, каждый из которых имеет опорный рычаг для создания противоположного крутящего момента при завинчивании или отвинчивании винтовых соединений.
Такие винтоверты называются силовыми винтовертами, поскольку создаваемый крутящий момент может составлять, например, до 10000 Нм, которые нельзя прикладывать без опорного рычага для оператора силового винтоверта. При увеличивающемся крутящем моменте в процессе завинчивания упруго деформируется опорный рычаг, за счет чего опорный рычаг поглощает энергию. Во время процесса завинчивания опорный рычаг затягивает винтоверт на винтовом соединении. Опорный рычаг поглощает не только возникающую во время процесса завинчивания энергию, но также имеющуюся после выключения силового винтоверта еще во вращающихся массах, таких как электродвигатель и особенно передача, энергию вращения за счет деформации.
В DE 19620782 А1 раскрыт способ создания винтового соединения, при котором измеряют изменение во времени крутящего момента в виде градиента. При этом различают между первым и вторым нарастанием крутящего момента, причем первое нарастание крутящего момента соответствует процессу нарезания резьбы, а второе нарастание крутящего момента - затягиванию винтового соединения. Если уменьшается второй градиент крутящего момента, то это оценивают как деформацию резьбы и выключают винтоверт.
В основу изобретения положена задача создания силового винтоверта, в частности, работающего от аккумулятора силового винтоверта, который обеспечивает возможность достижения заданного номинального значения крутящего момента для винтового соединения без опасности перерегулирования крутящего момента.
Эта задача решена с помощью признаков, указанных в независимом пункте формулы изобретения.
Силовой винтоверт согласно изобретению имеет электродвигатель в качестве привода, блок задания номинального значения крутящего момента, блок определения фактического значения крутящего момента, блок определения градиента крутящего момента и блок управления электродвигателем, который управляет электродвигателем в зависимости от градиента крутящего момента. Предусмотрен блок определения порогового значения крутящего момента, который вырабатывает пороговое значение крутящего момента, которое зависит от градиента крутящего момента и которое лежит ниже номинального значения крутящего момента. Если фактическое значение крутящего момента превышает пороговое значение крутящего момента, то блок управления электродвигателем вызывает уменьшение скорости вращения электродвигателя или уже полностью выключает электродвигатель.
Силовой винтоверт согласно изобретению обеспечивает возможность различения на основе определения градиента крутящего момента между жестким и мягким случаем завинчивания. На основе определяемого градиента крутящего момента и установленного номинального значения крутящего момента можно целенаправленно устанавливать пороговое значение крутящего момента настолько ниже номинального значения крутящего момента, что можно предотвращать перерегулирование крутящего момента за счет уменьшения скорости вращения или же посредством полного выключения электродвигателя после превышения порогового значения.
Предпочтительные модификации и варианты выполнения силового винтоверта согласно изобретению следуют из зависимых пунктов формулы изобретения.
В одном варианте выполнения предусмотрено, что блок управления электродвигателем задает электродвигателю при фактическом значении крутящего момента, которое лежит ниже порогового значения крутящего момента, максимально возможную скорость вращения электродвигателя. Таким образом, электродвигатель получает максимально возможную мощность, причем при заданных условиях нагрузки устанавливается максимально возможная скорость вращения. С помощью этих мер можно в кратчайшее время создавать винтовое соединение без опасности перерегулирования крутящего момента.
В одном варианте выполнения предусмотрено, что блок задания порогового значения крутящего момента задает разницу между номинальным значением крутящего момента и пороговым значением крутящего момента в зависимости от градиента крутящего момента. С помощью этой меры учитывается весь спектр от мягкого до жесткого случая завинчивания. Блок задания порогового значения крутящего момента устанавливает разницу при большом градиенте крутящего момента на более высокое значение, чем при меньшем градиенте крутящего момента, так что как при жестком, так и при мягком завинчивании предотвращается перерегулирование крутящего момента.
В одном варианте выполнения предусмотрено, что при задании порогового значения крутящего момента используется таблица, в которую занесены градиенты крутящего момента и номинальные значения крутящего момента для задания порогового значения крутящего момента. В качестве альтернативного решения может быть предусмотрено, что задание порогового значения крутящего момента осуществляется посредством экстраполирования порогового значения крутящего момента на основе замеренного градиента крутящего момента, фактического значения крутящего момента и установленного номинального значения крутящего момента.
В одном варианте выполнения предусмотрено измерение тока электродвигателя в качестве меры для фактического значения крутящего момента. Измерение тока электродвигателя можно осуществлять, например, в виде низкоомного шунта, которое по сравнению с электромагнитным измерением тока электродвигателя является более дешевым.
В другом варианте выполнения предусмотрен носитель данных, на который занесены характеристики винтового соединения и/или который предназначен для запоминания измеренных данных подлежащего изготовлению винтового соединения. Носитель данных содержит, по меньшей мере, заданное номинальное значение крутящего момента. Можно запоминать, по меньшей мере, действительно достигаемое фактическое значение крутящего момента винтового соединения. Кроме того, носитель данных может содержать характеристики, такие как, например, калибровочные данные силового винтоверта, или же может быть предусмотрен для запоминания таких характеристик.
Носитель данных может быть связан с силовым винтовертом. Согласно другому варианту выполнения, силовой винтоверт имеет средства для передачи сигналов в расположенный вне силового винтоверта носитель данных.
В одной модификации предусмотрена схема ограничения напряжения, которая ограничивает прикладываемое к электродвигателю напряжение заданным граничным напряжением. Граничное напряжение предпочтительно задается равным номинальному рабочему напряжению электродвигателя, чтобы электродвигатель мог способствовать уменьшению накопленной в опорном рычаге силового винтоверта в конце процесса завинчивания энергии за счет работы электродвигателя в режиме генератора без создания электродвигателем противоположного момента.
Схема ограничителя напряжения предпочтительно содержит биполярный ограничительный диод и/или варистор.
В другой модификации силового винтоверта, согласно изобретению, в качестве источника энергии для электродвигателя предусмотрен литиевый аккумулятор на основании его сравнительно высокой плотности энергии. Можно использовать, например, литиевый ионный аккумулятор или, например, литиевый полимерный аккумулятор.
Если питающее напряжение поставляется аккумулятором, то предпочтительно предусмотреть схему компенсации падения напряжения аккумулятора, которая компенсирует влияние падающего питающего напряжения на достижение установленного номинального значения крутящего момента, которое возникает, в частности, если фактическое значение крутящего момента определяют по току электродвигателя. В простой реализации схемы компенсации падения напряжения аккумулятора предусмотрено, что схема компенсации напряжения аккумулятора при уменьшающемся питающем напряжении либо повышает установленное номинальное значение крутящего момента, либо уменьшает определяемое фактическое значение крутящего момента. За счет этого предотвращается вмешательство в силовую часть электродвигателя.
Другие предпочтительные варианты выполнения и модификации силового винтоверта согласно изобретению следуют из приведенного ниже описания примеров выполнения силового винтоверта со ссылками на прилагаемые чертежи, на которых изображено:
фиг.1 - силовой винтоверт согласно изобретению;
фиг.2 - блок-схема блока управления силового винтоверта согласно изобретению;
фиг.3 - графики изменения крутящего момента в зависимости от времени, и
фиг.4а и 4b - различные варианты выполнения схемы ограничителя напряжения.
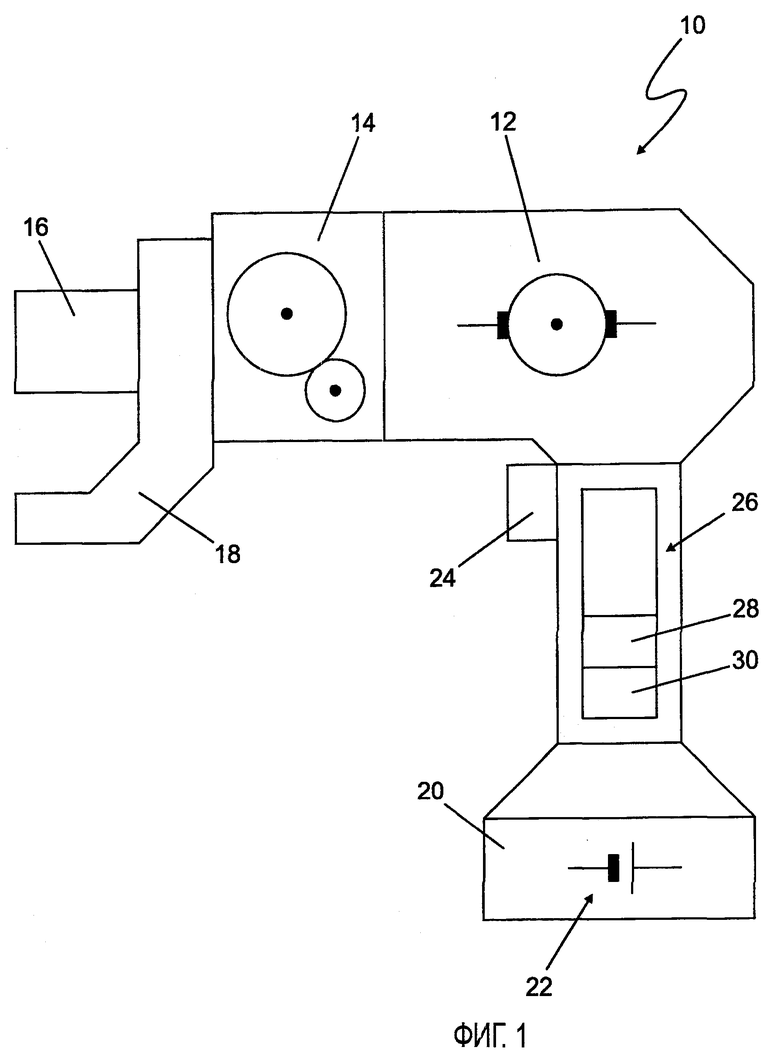
На фиг.1 схематично показан силовой винтоверт 10, который содержит электродвигатель 12 в качестве привода, который через передачу 14 приводит в действие сменную торцевую головку 16. Силовой винтоверт 10 содержит опорный рычаг 18, который во время процесса завинчивания создает противодействующий момент. В показанном примере выполнения силовой винтоверт 10 питается от аккумулятора и имеет часть 20, в которой расположен аккумулятор 22. Приведение в действие электродвигателя 12 осуществляется с помощью выключателя 24. Для управления электродвигателем 12 предусмотрена схема 26 управления, с которой связаны носитель 28 данных и приемопередающее устройство 30.
В показанном примере выполнения предусмотрен электродвигатель 12 постоянного тока, который предпочтительно управляется с помощью широтно-модулированного импульсного сигнала, который задает среднее рабочее напряжение электродвигателя 12.
На фиг.2 показан блок 40 управления электродвигателем, который создает широтно-модулированный импульсный сигнал s_PWM, который полностью отпирает или полностью запирает металлооксидный полевой транзистор, при этом длительность периода и/или длительность импульса могут быть изменяемыми.
Скважность модулированного по ширине сигнала s_PWM, которая отражает отношение длительности включения к длительности периода, задает среднее напряжение u_Mot на электродвигателе и обеспечивает тем самым влияние на подаваемую в электродвигатель мощность, соответственно, на скорость вращения электродвигателя 12.
После замыкания переключателя 42 протекает ток i_Mot электродвигателя в зависимости от скважности широтно-модулированного импульсного сигнала s_PWM, в зависимости от питающего напряжения u_Batt и в зависимости от нагрузки электродвигателя 12.
Ток i_Mot электродвигателя используется в качестве меры создаваемого электродвигателем 12 крутящего момента и, тем самым, в качестве меры создаваемого на сменной головке 16 фактического значения крутящего момента. В показанном примере выполнения ток i_Mot электродвигателя измеряется с помощью блока 44 измерения тока электродвигателя, который реализован в виде низкоомного сопротивления, соответственно, шунта, например, 0,01 Ом. Возникающее в качестве меры тока i_Mot электродвигателя на шунте 44 падение напряжения u_Sens усиливается в блоке 46 определения фактического значения крутящего момента, который содержит, например, включенный в виде дифференциального усилителя операционный усилитель, и задается в качестве меры фактического значения md_Ist крутящего момента. Предпочтительно предусмотреть не изображенную схему сглаживания напряжения, которая удаляет из фактического значения md_Ist крутящего момента высокочастотные мешающие сигналы.
Фактическое значение md_Ist крутящего момента подается в блок 40 управления электродвигателем, в блок 48 определения градиента крутящего момента, а также в блок 50 задания порогового значения крутящего момента. Блок 48 определения градиента крутящего момента определяет градиент dmd_Ist/dt посредством определения, по меньшей мере, одного временного дифференциального отношения. Предпочтительно, дифференциальное отношение приближается с помощью разностного отношения.
Блок 48 определения градиента крутящего момента подает градиент dmd_Ist/dt в блок 50 задания порогового значения крутящего момента, который на основе градиента dmd_Ist/dt крутящего момента, фактического значения md_Ist крутящего момента, поставляемого блоком 52 задания номинального значения крутящего момента номинального значения Md_Soll и минимального значения Md_Min крутящего момента задает пороговое значение Md_Lim крутящего момента, которое подается в блок 40 управления электродвигателем.
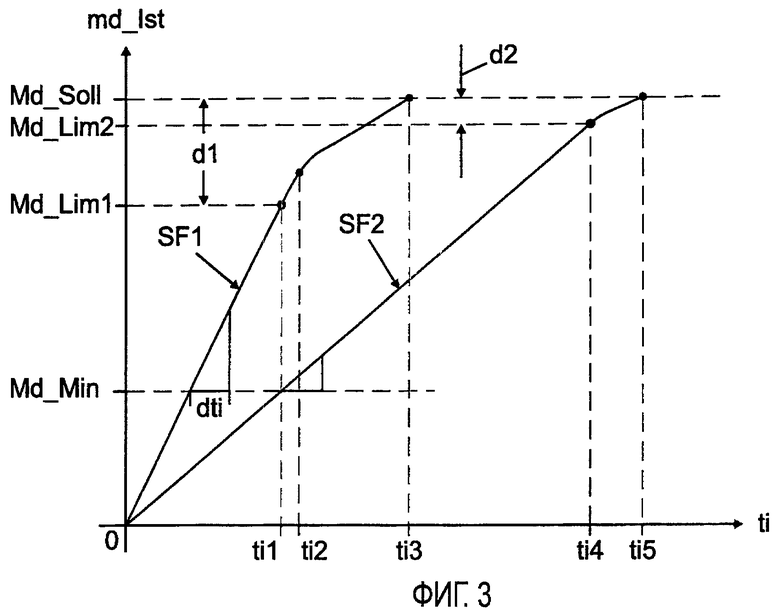
Задание порогового значения Md_Lim крутящего момента в блоке 50 задания порогового значения крутящего момента поясняется ниже на основе показанных на фиг.3 графиков изменения крутящего момента. На фиг.3 показан первый случай SF1 завинчивания, который соответствует жесткому завинчиванию, при котором происходит сравнительно быстрое изменение фактического значения md_Ist крутящего момента. На фиг.3 показан второй случай SF2 завинчивания, который соответствует мягкому завинчиванию, в котором происходит сравнительно медленное изменение фактического значения md_Ist крутящего момента.
Блок 48 определения градиента крутящего момента определяет после начала процесса завинчивания градиент dmd_Ist/dt крутящего момента, который можно приближать, например, с помощью, по меньшей мере, одного разностного отношения. В показанном на фиг.3 примере выполнения блок 48 определения градиента крутящего момента после превышения минимального значения Md_Min крутящего момента определяет, по меньшей мере, одно разностное отношение с использованием интервала времени dti. Интервал времени dti задается так, что при ожидаемом максимально быстром нарастании крутящего момента и при минимально возможном установленном номинальном значении Md_Soll крутящего момента обеспечивается, что блок 50 задания порогового значения крутящего момента может определять и выдавать пороговое значение Md_Lim1, Md_Lim2 крутящего момента.
Минимальное значение Md_Min крутящего момента задается, например, равным фактическому значению md_Ist крутящего момента, которое лежит немного выше ожидаемого момента сборки винтового соединения. С помощью этого обеспечивается, что определяется действительный градиент dmd_Ist/dt винтового соединения.
На основании установленного номинального значения Md_Soll крутящего момента, предпочтительно заданного минимального значения Md_Min крутящего момента, определяемого фактического значения md_Ist крутящего момента, а также на основании градиента dmd_Ist/dt крутящего момента блок 50 задания порогового значения крутящего момента задает в первом случае SF1 завинчивания первое пороговое значение Md_Lim1 и во втором случае SF2 завинчивания второе пороговое значение Md_Lim2 крутящего момента. Пороговые значения Md_Lim1, Md_Lim2 крутящего момента лежат каждое ниже номинального значения Md_Soll крутящего момента. Первое пороговое значение Md_Lim1 крутящего момента лежит на первую разницу d1 ниже номинального значения Md_Soll крутящего момента, а второе пороговое значение Md_Lim2 крутящего момента лежит на вторую разницу d2 ниже номинального значения Md_Soll крутящего момента.
Блок 50 задания порогового значения крутящего момента может задавать пороговое значение Md_Lim1, Md_Lim2 крутящего момента на основании заложенных в него таблиц. Согласно другому примеру выполнения, функциональные взаимосвязи между указанными входными величинами заложены в блок 50 задания порогового значения крутящего момента, так что пороговые значения Md_Lim1, Md_Lim2 крутящего момента можно экстраполировать, исходя из текущего фактического значения md_Ist крутящего момента. Функциональная взаимосвязь в простейшем случае может основываться на уравнении прямой, так что ожидаемый ход изменения крутящего момента можно задавать полностью с помощью крутизны и одной точки прямой. Пороговые значения Md_Lim1, Md_Lim2 крутящего момента, соответственно, необходимые для задания пороговых значений Md_Lim1, Md_Lim2 крутящего момента функциональные взаимосвязи предпочтительно определяются экспериментально и закладываются в блок 50 задания порогового значения крутящего момента.
В первом случае SF1 завинчивания исходят из того, что первое пороговое значение Md_Lim1 крутящего момента достигается в первый момент времени ti1. Первое пороговое значение Md_Lim1 крутящего момента, соответственно, первая разница d1 согласовывается с жестким случаем завинчивания, который распознается на основании определяемого градиента dmd_Ist/dt крутящего момента. Первая разница d1 является сравнительно большой.
Во втором случае SF2 завинчивания исходят из того, что второе пороговое значение Md_Lim2 крутящего момента достигается в четвертый момент времени ti4. Второе пороговое значение Md_Lim2 крутящего момента, соответственно, вторая разница d2 согласовывается с мягким случаем завинчивания, который распознается на основании определяемого градиента dmd_Ist/dt крутящего момента. Вторая разница d2 является сравнительно небольшой.
Содержащаяся в блоке 40 управления электродвигателя первая схема 54 сравнения сравнивает пороговое значение Md_Lim1, Md_Lim2 крутящего момента с фактическим значением md_Ist крутящего момента и выдает в зависимости от результата сравнения управляющий сигнал s_Mot. Управляющий сигнал s_Mot обеспечивает, что широтно-модулированный импульсный сигнал s_PWM подает в электродвигатель 12 меньшую мощность, чем ранее, так что электродвигатель 12 уменьшает скорость вращения. В качестве альтернативного решения может быть предусмотрено, что при возникновении управляющего сигнала s_Mot электродвигатель 12 полностью выключается.
Уменьшение скорости вращения, соответственно, полное выключение после достижения порогового значения Md_Lim1, Md_Lim2 крутящего момента предотвращает по существу перерегулирование фактического значения md_Ist крутящего момента, которое приводило бы к тому, что винтовое соединение затягивалось с более высоким крутящим моментом, чем номинальное значение Md_Soll крутящего момента.
Перерегулирование вызывается за счет имеющейся в электродвигателе 12 и особенно в передаче 14 кинетической энергии в конце процесса завинчивания. В этом отношении особенно критичным является жесткий случай SF1 завинчивания, поскольку в течение относительно короткого времени ti достигается номинальное значение Md_Soll крутящего момента. В показанном на фиг.3 примере выполнения для пояснения проблемы исходят из того, что несмотря на уменьшение скорости вращения или полное выключение электродвигателя 12 после превышения первого порогового значения Md_Lim1 крутящего момента происходит нарастание фактического значения md_Ist крутящего момента до второго момента времени ti2 почти без понижения градиента dmd_Ist/dt крутящего момента. Вызываемое управляющим сигналом s_Mot и задаваемое широтно-модулированным импульсным сигналом s_PWM уменьшение скорости вращения, соответственно, полное выключение электродвигателя 12 начинает действовать лишь начиная со второго момента времени ti2.
Номинальное значение Md_Soll крутящего момента достигается к третьему моменту времени ti3 с уменьшенным градиентом dmd_Ist/dt крутящего момента. Если электродвигатель 12 при превышении первого порогового значения Md_Lim1 крутящего момента уже не отключен полностью, то самое позднее в третий момент времени ti3 предусматривается выключение электродвигателя 12. Это выключение вызывается останавливающим сигналом s_Stop, который выдает расположенная в блоке 40 управления электродвигателем вторая схема 56 сравнения в зависимости от результата сравнения номинального значения Md_Soll крутящего момента и фактического значения md_Ist крутящего момента.
При мягком случае SF1 завинчивания, в противоположность жесткому случаю SF2 завинчивания, после достижения второго порогового значения Md_Lim2 крутящего момента имеется в распоряжении еще сравнительно длительный промежуток времени до достижения номинального значения Md_Soll крутящего момента. Поэтому второе пороговое значение Md_Lim2 крутящего момента может лежать значительно ближе к номинальному значению Md_Soll крутящего момента, соответственно, меньшей разнице d2. В этом случае также после достижения второго порогового значения Md_Lim2 крутящего момента вызывается уменьшение скорости вращения электродвигателя 12 или электродвигатель 12 уже полностью выключается. За счет обусловленного этим уменьшения градиента dmd_Ist/dt крутящего момента после превышения второго порогового значения Md_Lim2 крутящего момента также в мягком случае SF2 завинчивания предотвращается перерегулирование, так что винтовое соединение затягивается точно с номинальным значением Md_Soll крутящего момента, которое достигается к пятому моменту времени ti5.
В показанном примере выполнения исходят из того, что для питания электродвигателя 12 предусмотрен аккумулятор 22, который предпочтительно реализован в виде литиевого аккумулятора, который отличается высокой плотностью энергии. Можно использовать, например, литиевый ионный аккумулятор или, например, литиевый полимерный аккумулятор. Аккумулятор 22 поставляет напряжение u_Batt питания. Характеристика разряда аккумулятора, в частности, литиевого аккумулятора, хотя и проходит относительно плоско, однако, даже небольшое падение напряжения имеет непосредственное воздействие на достижение номинального значения Md_Soll крутящего момента, если в качестве меры фактического значения md_Ist крутящего момента используется ток i_Mot электродвигателя, поскольку при падающем питающем напряжении u_Batt устанавливается меньший ток i_Mot электродвигателя.
Поэтому предусмотрена схема 60 компенсации падения напряжения аккумулятора, которая компенсирует влияние падающего питающего напряжения u_Batt на достижение установленного номинального значения Md_Soll крутящего момента.
В принципе, питающее напряжение u_Batt можно непосредственно стабилизировать и удерживать постоянным, однако, для этого требуются мощные полупроводниковые элементы, которые, с одной стороны, являются относительно дорогими и, с другой стороны, вследствие высоких ожидаемых токов, например, до 100 А, являются слишком большими по объему, чтобы размещать их в силовом винтоверте 10.
Поэтому схема 60 компенсации падения напряжения аккумулятора предпочтительно подает компенсационный сигнал s_Batt_Komp в блок 52 задания номинального значения крутящего момента или в блок 46 определения фактического значения крутящего момента, причем при падающем питающем напряжении u_Batt либо увеличивается номинальное значение Md_Soll крутящего момента, либо уменьшается фактическое значение md_Ist крутящего момента.
Схема 60 компенсации падения напряжения аккумулятора может содержать, например, источник опорного напряжения, с которым сравнивается питающее напряжение u_Batt. При уменьшающейся разнице между опорным напряжением и питающим напряжением u_Batt во время процесса разрядки аккумулятора 22 постоянно увеличивается компенсационный сигнал s_Batt_Komp, при этом во время оценки сигналов увеличение соответствует виртуальному уменьшению тока i_Mot электродвигателя для компенсации действительно меньшего тока i_Mot электродвигателя при падающем питающем напряжении u_Batt.
Во время работы силового винтоверта 10 опорный рычаг 18 обеспечивает необходимый противодействующий момент для передаваемого со сменной головки 16 на винтовое соединение крутящего момента. Опорный рычаг 18 для подготовки процесса завинчивания необходимо фиксировать на подходящей опоре. Во время процесса завинчивания возникает в зависимости от увеличивающегося крутящего момента соответственно увеличивающаяся деформация опорного рычага 18, которая соответствует накоплению энергии. Накопленная в опорном рычаге 18 энергия имеет максимальное значение после выключения силового винтоверта 10 при достижении номинального значения Md_Soll крутящего момента.
За счет деформации опорного рычага 18 сменная головка 16 и тем самым весь силовой винтоверт 10 затягиваются на винтовом соединении. После выключения электродвигателя 10 накопленная в опорном рычаге 18 энергия приводит к тому, что электродвигатель 12, исходя из сменной головки 16, приводится во вращение через передачу 14 в обратном направлении, при этом электродвигатель 12 начинает вращаться в направлении, противоположном направлению привода.
Поэтому электродвигатель 12 при высвобождении накопленной в опорном рычаге 18 энергии работает как генератор. Для быстрого и простого высвобождения накопленной в опорном рычаге 18 энергии электродвигатель должен бы иметь возможность свободного вращения без создания противодействующего момента, который бы затруднял и удлинял процесс снятия нагрузки. Поэтому электродвигатель 12 не должен быть в этом рабочем состоянии короткозамкнутым или низкоомно перемкнутым, при этом уже при небольшом напряжении генератора возникал бы большой ток i_Mot электродвигателя в соответствии с большим противоположным моментом. При этом следует учитывать, что в режиме генератора напряжение u_Mot электродвигателя вследствие другого направления вращения меняет полярность, и поэтому ток i_Mot электродвигателя проходит в обратном направлении, если имеется путь прохождения тока.
В частности, вследствие экспериментов было установлено, что в режиме генератора могут возникать значительные напряжения u_Mot электродвигателя, которые лежат существенно выше номинального рабочего напряжения электродвигателя 12. В электродвигателе 12 с номинальным рабочим напряжением, например, 28 В, измерялись пики напряжения до свыше 200 В с длительностью импульсов в несколько 100 нс. Такие богатые энергией импульсы могут приводить к разрушению компонентов схемы 26 управления, в частности, к разрушению переключательного элемента 42.
Поэтому предусмотрена схема 70 ограничения напряжения, которая ограничивает возникающее на электродвигателе 12 напряжение u_Mot работающего при освобождении накопленной в опорном рычаге 18 энергии как генератор вращающегося противоположно приводному направлению электродвигателя 12 заданным ограничительным напряжением u_Lim.
Схему 70 ограничения напряжения нельзя сравнивать с холостым ходом, который по существу лишь коротко замыкает электродвигатель 12. Схема 70 ограничения напряжения обеспечивает возможность целенаправленного задания ограничительного напряжения u_Lim, для того чтобы электродвигатель 12 во время режима генератора при освобождении накопленной в опорном рычаге 18 энергии, по меньшей мере, до достижения ограничительного напряжения u_Lim, не создавал противодействующий момент. В этом рабочем состоянии возникает ток i_Mot электродвигателя в обратном направлении по сравнению с нормальным режимом лишь тогда, когда напряжение u_Mot электродвигателя в режиме генератора пытается превысить ограничительное напряжение u_Lim.
Однако схема 70 ограничения напряжения может выполнять функцию холостого хода, при этом во время холостого хода, при котором направление тока i_Mot электродвигателя не меняется на противоположное, ограничительное напряжение u_Lim возникает в качестве напряжения u_Mot электродвигателя. При необходимости может быть предусмотрен не изображенный переключаемый холостой ход, который управляется с помощью широтно-модулированного импульсного сигнала s_PWM.
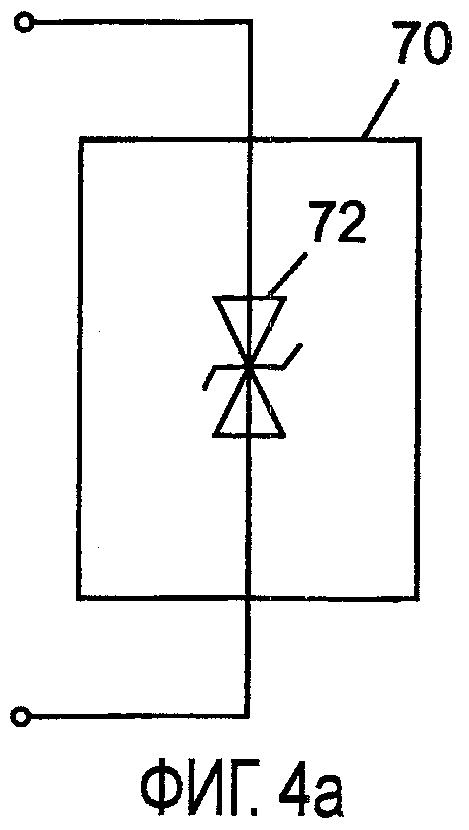
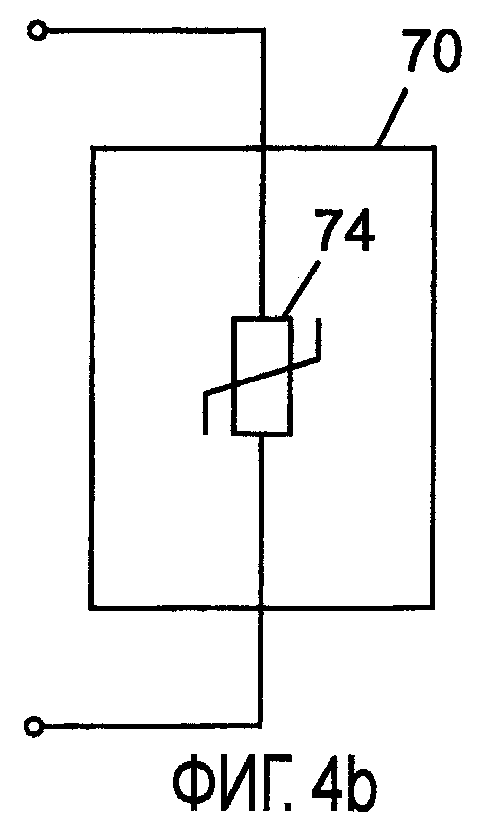
Схема 70 ограничения напряжения может быть реализована различными путями. В показанном на фиг.4а примере выполнения схема 70 ограничения напряжения содержит биполярный ограничивающий напряжение диод 72, который называется также подавителем переходного напряжения (TVS = Transient Voltage Suppressor). Ограничивающий напряжение диод 72 содержит два полупроводниковых стабилитрона, интегрированных в единственный конструктивный элемент. В показанном на фиг.4b примере выполнения схема 70 ограничения напряжения содержит варистор 74.
В то время как диоды 72 обеспечивают возможность очень быстрого реагирования на импульсы напряжения, варистор 74 может, по меньшей мере, кратковременно принимать и отводить высокие энергии. Поэтому в зависимости от требований может быть предусмотрена комбинация диодов 72, а также варистор 74.
Ограничительное напряжение u_Lim сначала устанавливается на значение, при котором в нормальном режиме привода электродвигателя 12 не может происходить ограничение напряжения u_Mot электродвигателя. В соответствии с этим, ограничительное напряжение u_Lim при работающем от напряжения 28 В электродвигателе задается равным, по меньшей мере, 28 В. Поскольку в режиме генератора электродвигателя 12 напряжение u_Mot электродвигателя меняется на противоположное, то схема 70 ограничения напряжения должна обеспечивать ограничительное напряжение u_Lim, в частности, для напряжения u_Mot электродвигателя при обратной полярности, поскольку, в частности, в режиме генератора существует опасность перенапряжения. В показанном примере выполнения с указанной на фиг.2 полярностью питающего напряжения u_Batt, в генераторном режиме электродвигателя 12 возникает положительный потенциал напряжения u_Mot электродвигателя на переключательном элементе 42, в то время как отрицательный потенциал приложен к аккумулятору 22.
Целесообразно задается ограничительное напряжение u_Lim, которое соответствует, по меньшей мере, величине номинального рабочего напряжения электродвигателя 12. Согласно другому варианту выполнения, по меньшей мере, в генераторном режиме электродвигателя 12, эффективное ограничительное напряжение u_Lim устанавливается на значение так называемого безопасного малого напряжения, которое может быть предписано законом. В этом смысле безопасное малое напряжение задается тем, что в электрическом приборе, в данном случае в силовом винтоверте 10, находящиеся под напряжением части, доступные для соприкосновения, не должны иметь напряжение, превосходящее безопасное малое напряжение. Если это напряжение выше, то должны приниматься специальные меры для защиты от соприкосновения. Безопасное малое напряжение составляет, например, 42 В.
В другой модификации силового винтоверта 10 согласно изобретению предусмотрен носитель 80 данных, который содержит данные винтового соединения, такие как, например, по меньшей мере, номинальное значение Md_Soll крутящего момента, и/или подготовлен для приема данных, таких как, например, действительно достигаемое фактическое значение md_Ist крутящего момента, которые запоминаются, по меньшей мере, в конце процесса завинчивания. Кроме того, носитель 80 данных может содержать калибровочные данные силового винтоверта 10 и/или может быть подготовлен для запоминания характеристик силового винтоверта 10. Предпочтительно, носитель 80 данных реализован в виде переносного носителя данных, например, в виде недорогого радиочастотного идентификатора (RFID).
В другой модификации силового винтоверта 10 согласно изобретению предусмотрены средства 82 для передачи сигналов, например, приемопередающее устройство 82, которое предназначено для приема и/или передачи данных, относящихся к винтовому соединению и/или относящихся к характеристикам силового винтоверта 10. Приемопередающее устройство 82 предпочтительно предназначено, например, для взаимодействия с не изображенным носителем данных, например, с переносным носителем данных, который может соответствовать носителю 80 данных. Если этот носитель данных является уже упомянутым радиочастотным идентификатором, то приемопередающее устройство 82 имеет высокочастотный передатчик и/или высокочастотный приемник, при этом частота передачи и приема согласована с частотой передачи и приема носителя данных.
Изобретение относится к области переносных инструментов. Технический результат - предотвращение перерегулирования крутящего момента с обеспечением возможности точного достижения номинального значения крутящего момента в кратчайшее время. Силовой винтоверт содержит электродвигатель (12) в качестве привода, блок (52) задания номинального значения крутящего момента, блок (46) определения фактического значения крутящего момента, блок (48) определения градиента крутящего момента и блок (40) управления электродвигателем, который управляет электродвигателем в зависимости от градиента (dmd-Ist/dt) крутящего момента. Предусмотрен блок (50) задания порогового значения крутящего момента, который поставляет пороговое значение (Md-Lim, Md-Lim1, Md-Lim2) крутящего момента, которое зависит от градиента (dmd-Ist/dt) крутящего момента и которое лежит ниже номинального значения (Md-Soll) крутящего момента. Если фактическое значение (md-Ist) крутящего момента превышает пороговое значение (Md-Lim, Md-Lim1, Md-Lim2) крутящего момента, то блок (40) управления электродвигателем (12) вызывает уменьшение скорости вращения или полностью выключает электродвигатель (12). 15 з.п. ф-лы, 5 ил.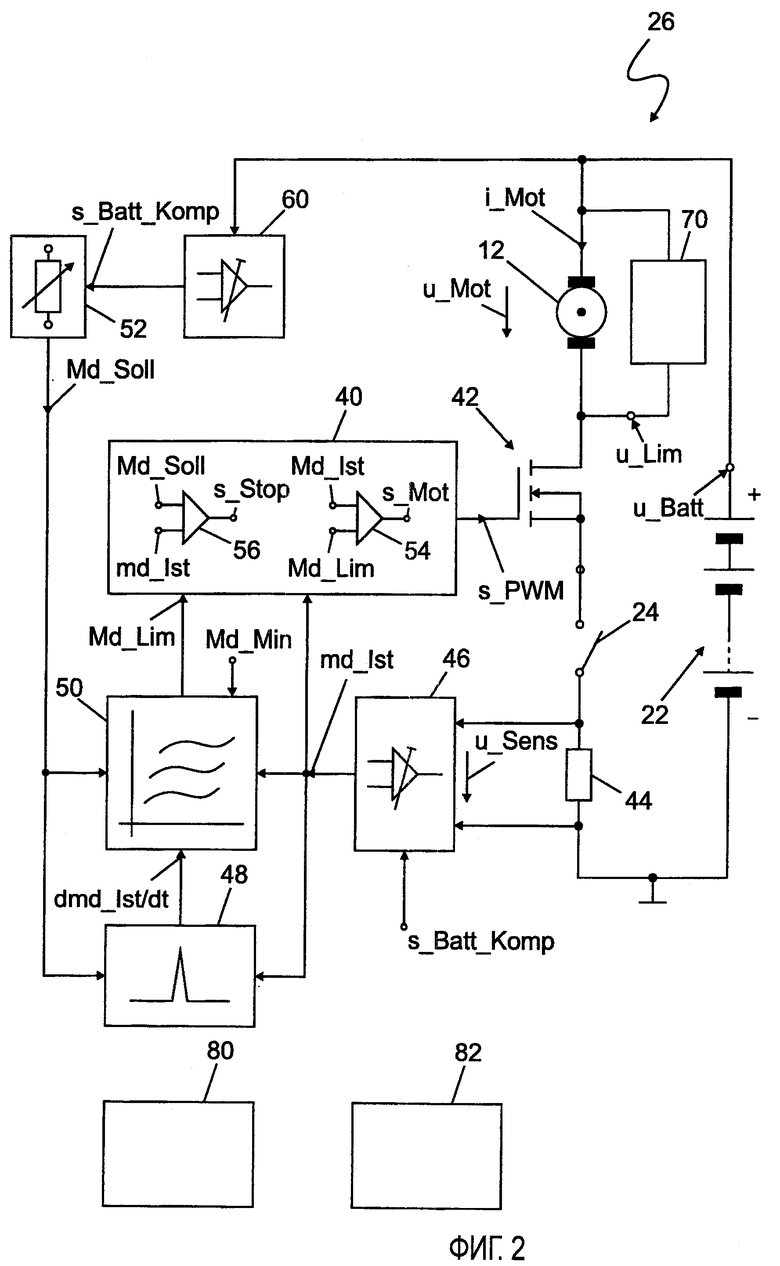
1. Силовой винтоверт, содержащий электродвигатель (12) в качестве привода головки, блок (52) задания номинального значения крутящего момента, блок (46) определения фактического значения крутящего момента, блок (48) определения градиента крутящего момента и блок (40) управления электродвигателем в зависимости от градиента (dmd_Ist/dt) крутящего момента, отличающийся тем, что предусмотрен блок (50) задания порогового значения крутящего момента, причем блок (50) задания порогового значения крутящего момента задает пороговое значение (Md_Lim, Md_Lim1, Md_Lim2) крутящего момента, которое зависит от градиента (dmd_Ist/dt) крутящего момента и которое лежит ниже номинального значения (Md_Soll) крутящего момента, причем блок (40) управления электродвигателем (12) задает уменьшение скорости вращения электродвигателя или полностью выключает электродвигатель (12), когда фактическое значение (md_Ist) крутящего момента превышает пороговое значение (Md_Lim, Md_Lim1, Md_Lim2) крутящего момента.
2. Силовой винтоверт по п.1, отличающийся тем, что блок (40) управления электродвигателем задает электродвигателю (12) при фактическом значении (md_Ist) крутящего момента, которое лежит ниже порогового значения (Md_Lim, Md_Lim1, Md_Lim2) крутящего момента, максимально возможную скорость вращения электродвигателя (12).
3. Силовой винтоверт по п.1 или 2, отличающийся тем, что блок (50) задания порогового значения крутящего момента задает разницу (d1, d2) между номинальным значением (Md_Soll) крутящего момента и пороговым значением (Md_Lim, Md_Lim1, Md_Lim2) крутящего момента в зависимости от градиента (dmd_Ist/dt) крутящего момента.
4. Силовой винтоверт по п.3, отличающийся тем, что блок (50) задания порогового значения крутящего момента задает большую разницу (d1, d2) при более высоком градиенте (dmd_Ist/dt) крутящего момента, чем при меньшем градиенте (dmd_Ist/dt) крутящего момента.
5. Силовой винтоверт по п.1, отличающийся тем, что в блок (50) задания порогового значения крутящего момента занесены табличные значения градиентов (dmd_Ist/dt) крутящего момента и номинальные значения (Md_Soll) крутящего момента для задания порогового значения (Md_Lim, Md_Lim1, Md_Lim2) крутящего момента.
6. Силовой винтоверт по п.1, отличающийся тем, что блок (50) задания порогового значения крутящего момента экстраполирует пороговое значение (Md_Lim, Md_Lim1, Md_Lim2) крутящего момента на основании определяемого градиента (dmd_Ist/dt) крутящего момента, фактического значения (md_Ist) крутящего момента и номинального значения (Md_Soll) крутящего момента.
7. Силовой винтоверт по п.1, отличающийся тем, что предусмотрен блок (44) измерения тока электродвигателя, который измеряет ток (i_Mot) электродвигателя в качестве меры для фактического значения (md_Ist) крутящего момента.
8. Силовой винтоверт по п.1, отличающийся тем, что предусмотрен носитель (80) данных, в который занесены характеристики винтового соединения и/или силового винтоверта (10), при этом носитель (80) данных предназначен для запоминания измеренных данных винтового соединения или характеристик силового винтоверта (10).
9. Силовой винтоверт по п.8, отличающийся тем, что силовой винтоверт (10) имеет средства (82) для передачи сигналов в расположенный вне силового винтоверта (10) носитель данных.
10. Силовой винтоверт по п.1, отличающийся тем, что предусмотрена схема (70) ограничения напряжения, которая ограничивает прикладываемое к электродвигателю (12) напряжение (u_Mot) заданным ограничительным напряжением (u_Lim), равным, по меньшей мере, номинальному рабочему напряжению электродвигателя (12).
11. Силовой винтоверт по п.10, отличающийся тем, что схема (70) ограничения напряжения содержит биполярный ограничительный диод (72).
12. Силовой винтоверт по п.10, отличающийся тем, что схема (70) ограничения напряжения содержит варистор (74).
13. Силовой винтоверт по п.1, отличающийся тем, что предусмотрен аккумулятор (22) для обеспечения питающего напряжения (u_Batt).
14. Силовой винтоверт по п.13, отличающийся тем, что аккумулятор (22) является литиевым аккумулятором в виде литиевого ионного аккумулятора или литиевого полимерного аккумулятора.
15. Силовой винтоверт по п.13 или 14, отличающийся тем, что предусмотрена схема (60) компенсации падения напряжения аккумулятора, которая компенсирует влияние падающего питающего напряжения (u_Batt) на достижение установленного номинального значения (Md_Soll) крутящего момента.
16. Силовой винтоверт по п.15, отличающийся тем, что схема (60) компенсации напряжения аккумулятора при уменьшающемся питающем напряжении (u_Batt) повышает установленное номинальное значение (Md_Soll) крутящего момента или уменьшает определяемое фактическое значение (md_Ist) крутящего момента.
| DE 4310936 A1, 07.10.1993 | |||
| Пневмогидравлический импульсный гайковерт | 1988 |
|
SU1524992A1 |
| Двухрежимный гайковерт | 1989 |
|
SU1701510A1 |
| DE 19647813 A1, 04.06.1998 | |||
| УСТРОЙСТВО И СПОСОБ СТЕРИЛИЗАЦИИ УПАКОВОК | 2003 |
|
RU2326027C2 |

