Изобретение относится к приборостроительной промышленности и может быть использовано в системах автоматического управления летательными аппаратами в условиях меняющихся задающих воздействий по знаку и величине.
В качестве известных решений следует отметить распространенное применение непосредственно процесса интегрирования и интегрирующих звеньев для достижения требуемого астатизма в системах автоматического управления летательными аппаратами (САУ ЛА) [1]. Основу решений составляет подача на интегрирующее звено сигнала управления или компоненты этого сигнала, например, рассогласования (по крену, высоте, тангажу, курсу). В замкнутом контуре регулирования обеспечивается при этом сведение к нулю сигнала на входе интегрирующего звена. Так, при регулировании с интегральным законом по рассогласованию достигается астатизм 1-го порядка, установившееся значение регулируемой координаты равно задающему воздействию, рассогласование сводится к нулю.
Известные решения имеют существенный недостаток для систем автоматического регулирования с существенно переменными задающими воздействиями, состоящий в следующем. При изменении сигналов задающего воздействия на этапах перекладки со сменой полярности или при периодических воздействиях на выходе интегрирующего звена и системы в целом создается затягивание процесса по отработке измененного сигнала воздействия, что сужает положительные свойства астатического регулирования, ухудшая характеристики системы автоматического управления по точности и быстродействию.
Наиболее близким техническим решением является реализация процесса регулирования на основе раздельного интегрирования по сигналам положительной и отрицательной полярности. Способ заключается в том, что задают сигнал управления для интегрирования, интегрируют текущий сигнал интегрирования и масштабируют интегрированный сигнал [2].
Известное устройство, реализующее данный способ, имеет в своем составе задатчик сигнала интегрирования и последовательно соединенные интегрирующее звено и масштабный усилитель [2].
Недостатками известных решений являются невысокая динамическая точность при отработке сигналов с изменяющейся полярностью, обусловленная затянутостью списывания сигнала предшествующей полярности, и сложный состав устройства.
Технической задачей, решаемой в предлагаемом изобретении, является повышение динамической точности и упрощение устройства.
Указанный технический результат достигается тем, что в известном способе интегрирования сигнала управления для астатических систем управления летательными аппаратами, заключающемся в том, что задают сигнал управления для интегрирования, интегрируют текущий сигнал интегрирования и масштабируют интегрированный сигнал, дополнительно усиливают масштабированный сигнал, инвертируют усиленный сигнал, задают пороговый сигнал ε≥0, перемножают задающий сигнал управления и масштабированный сигнал, сравнивают сигнал перемножения с пороговым сигналом, формируют сигнал обратной связи, равный инвертированному сигналу при превышении сигнала перемножения над пороговым сигналом, формируют текущий сигнал интегрирования, равный сумме задающего сигнала и сигнала обратной связи, и ограничивают промасштабированный интегрированный сигнал.
Указанный технический результат достигается также тем, что известное устройство интегрирования сигнала управления для астатических систем управления летательными аппаратами, содержащее задатчик сигнала интегрирования и последовательно соединенные интегрирующее звено и масштабный усилитель, дополнительно содержит сумматор, инвертирующий усилитель, управляемый ключ, задатчик порогового сигнала, блок умножения, релейный элемент и ограничитель сигнала, выход сумматора соединен с интегрирующим звеном, а вход сумматора - с выходом задатчика сигнала интегрирования и с первым входом блока умножения, второй вход блока умножения соединен с выходом масштабного усилителя, через последовательно соединенные инвертирующий усилитель и управляемый ключ - со вторым входом сумматора и через ограничитель сигналов -с выходом устройства, выход блока умножения соединен через релейный элемент со вторым входом управляемого ключа, а выход задатчика порогового сигнала соединен со вторым входом релейного элемента.
На чертеже представлена блок-схема устройства интегрирования сигнала управления для астатических систем управления летательными аппаратами, реализующая предложенный способ.
Устройство интегрирования сигнала управления для астатических систем управления летательными аппаратами содержит последовательно соединенные задатчик сигнала интегрирования 1 (ЗСИ), сумматор 2 (С), интегрирующее звено 3 (ИЗ), масштабный усилитель 4 (МУ) и ограничитель сигнала 5 (ОС), выход которого является выходом устройства, последовательно соединенные инвертирующий усилитель 6 (ИУ) и управляемый ключ 7 (УК), выход которого соединен со вторым входом сумматора 2, последовательно соединенные блок умножения 8 (БУ) и релейный элемент 9 (РЭ), выход которого соединен со вторым входом управляемого ключа 7, задатчик порогового сигнала 10 (ЗПС), выход которого соединен со вторым входом релейного элемента 9, выход задатчика сигнала интегрирования 1 соединен с первым входом блока умножения 8, а выход масштабного усилителя 4 соединен со входом инвертирующего усилителя 6 и со вторым входом блока умножения 8.
Устройство интегрирования сигнала управления для астатических систем управления летательными аппаратами, реализующее предлагаемый способ, работает следующим образом.
В устройстве сформированы три канала:
- прямой, интегральный канал управления, включающий задатчик сигнала интегрирования 1, сумматор 2, интегрирующее звено 3, масштабный усилитель 4 и ограничитель сигнала 5;
- канал обратной связи, состоящий из инвертирующего усилителя 6 и управляемого ключа 7. Канал обеспечивает введение обратной связи к прямому каналу для списывания интегрированного сигнала при смене полярности входного сигнала;
- управляющий работой устройства канал, включающий в себя блок умножения 8, релейный элемент 9 и задатчик порогового сигнала 10. Канал управляет подключением-отключением канала обратной связи при смене полярности входного сигнала посредством управляемого ключа 7.
При включении устройства и нулевом сигнале х на выходе задатчика сигнала интегрирования 1 сигналы: у1 - с выхода интегрирующего звена 3, у2 - с выхода масштабного усилителя 4 и выходной сигнал устройства увых с выхода ограничителя сигнала 5 равны нулю. Пусть задается сигнал х блоком 1, х>0. Управляемый ключ 7 нормально-замкнут. Блок умножения 8 формирует сигнал:

где у2 - сигнал на выходе масштабного усилителя 4, в начале процесса у2=0, так как

где Кму - коэффициент масштабного усилителя 4, Кму>0;
у1 - сигнал на выходе интегрирующего звена 3:

где Δx - сигнал на выходе сумматора 2:

В свою очередь сигнал xос формируется каналом обратной связи по сигналу у2:
где Киу - коэффициент инвертирующего усилителя 6, Киу<0;
ε - пороговый сигнал, задаваемый задатчиком порогового сигнала 10, ε≥0.
Реализация функционального подключения сигнала xос в соответствии с (5) обеспечивается управляющим каналом. А именно.
В начале процесса сигнал A1=x·y2 в соответствии с (2) и (3) развивается от нуля в положительном направлении.
Сигнал с выхода релейного элемента 9 А2:
При А2=0 управляемый ключ 7 замкнут. При А2=1 управляемый ключ 7 размыкается.
Таким образом, обеспечивается работа устройства по прямому интегральному каналу при х>0 и у2>0 (далее будет показано, что и при х<0 и у2<0) и при превышении х·у2≥ε. В частности, величина (может быть выставлена равной 0. Наличие небольшой величины ε≠0 обеспечивает сочетание прямой цепи интегрирования с обратной связью, т.е. прохождение сигнала x через инерционный усилитель в области малых величин x.
При уменьшении и дальнейшей смене полярности сигнала х - в рассматриваемом случае на отрицательный - сигнал A1 на выходе блока 8 становится меньше ε, A2 на выходе блока 9 становится равным 0, управляемый ключ 7 замыкает цепь обратной связи к интегральному каналу. Передаточная функция сигнала у2 к сигналу х становится равной:
 ,
,
где 
Величина Киу принимается достаточно большой, чтобы постоянная времени Т была малой с целью быстрого списывания наинтегрированного значения сигналов у1 и у2 при предыдущем режиме с x>0.
При дальнейшем росте сигналов y1 и y2 от сигнала х отрицательной полярности они также принимают отрицательные значения.
Соответственно произведение х·у2 и сигнал у1 на выходе блока 3 становится больше нуля и больше ε. Сигнал А2 становится А2=1 на выходе блока 9. Управляемый ключ 7 размыкает цепь обратной связи: идет процесс чистого интегрирования по отрицательному сигналу.
При изменении в дальнейшем полярности сигнала х процесс повторяется, т.е. быстро списывается наинтегрированный сигнал предыдущей полярности с переходом на чистое интегрирование сигнала новой полярности.
Ограничитель сигнала 5 на выходе устройства обеспечивает требуемое ограничение наинтегрированного сигнала с учетом его масштабирования (у2) с целью обеспечения требуемого уровня выходного сигнала увых.
Достижение положительного результата видно из аналитического рассмотрения процессов и подтверждено результатами математического моделирования.
Все составные звенья могут быть реализованы на современных элементах автоматики и вычислительной техники, например, по [3], а также программно-алгоритмически.
Источники информации
1. Аэродинамика, устойчивость и управляемость сверхзвуковых самолетов. Под ред. Г.С.Бюшгенса. М.: Наука, Физматлит, 1998, с.555.
2. А.с. СССР №1695330, G 06 G 7/186, 1989.
3. А.У.Ялышев, О.И.Разоренов. Многофункциональные аналоговые регулирующие устройства автоматики. М.: Машиностроение, 1981, с.103.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ИНТЕГРИРОВАНИЯ ДЛЯ АСТАТИЧЕСКИХ СИСТЕМ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2008 |
|
RU2394261C1 |
| АДАПТИВНОЕ ИНТЕГРАЛЬНОЕ УСТРОЙСТВО ДЛЯ СИСТЕМ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2008 |
|
RU2393521C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНТЕГРАЛЬНОГО СИГНАЛА УПРАВЛЕНИЯ ДЛЯ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2403608C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНТЕГРАЛЬНОГО СИГНАЛА СТАБИЛИЗАЦИИ ПЛАНИРУЮЩЕГО ДВИЖЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2459744C1 |
| СПОСОБ ФОРМИРОВАНИЯ АДАПТИВНОГО СИГНАЛА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ УГЛОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2569580C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНТЕГРАЛЬНОГО АДАПТИВНОГО СИГНАЛА СТАБИЛИЗАЦИИ ПЛАНИРУЮЩЕГО ДВИЖЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2460113C1 |
| СПОСОБ ИНТЕГРИРОВАНИЯ СИГНАЛА РАССОГЛАСОВАНИЯ ДЛЯ АСТАТИЧЕСКИХ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2283512C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2532719C1 |
| Устройство программного управления нагревом роторов турбоагрегатов при разгонно-циклических испытаниях | 1987 |
|
SU1502974A2 |
Изобретение относится к приборостроительной промышленности и может быть использовано в системах автоматического управления летательными аппаратами в условиях меняющихся задающих воздействий по знаку и величине. Техническим результатом изобретения является повышение динамической точности и упрощение устройства. Способ интегрирования сигнала управления для астатических систем управления летательными аппаратами заключается в том, что задают сигнал управления для интегрирования, интегрируют текущий сигнал интегрирования и масштабируют интегрированный сигнал, усиливают масштабированный сигнал, инвертируют усиленный сигнал, задают пороговый сигнал ε≥0, перемножают задающий сигнал управления и масштабированный сигнал, сравнивают сигнал перемножения с пороговым сигналом, формируют сигнал обратной связи, равный инвертированному сигналу при превышении сигнала перемножения над пороговым сигналом, формируют текущий сигнал интегрирования, равный сумме задающего сигнала и сигнала обратной связи, и ограничивают промасштабированный интегрированный сигнал. Устройство, реализующее способ, содержит задатчик сигнала интегрирования, сумматор, интегрирующее звено, масштабный усилитель, ограничитель сигнала, инвертирующий усилитель, управляемый ключ, блок умножения, релейный элемент и задатчик порогового сигнала. 2 н.п. ф-лы, 1 ил.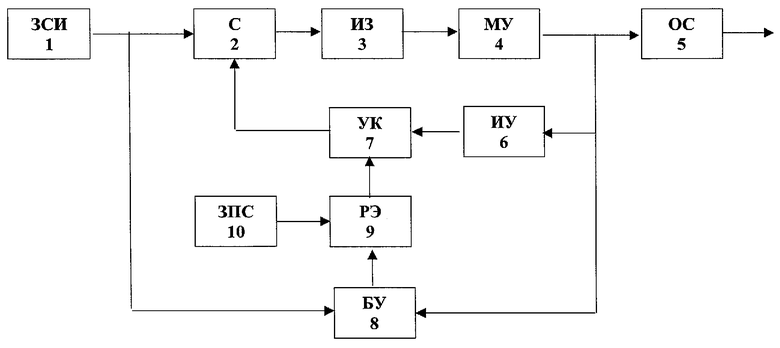
| УСТРОЙСТВО КООРДИНИРОВАННОГО РЕГУЛИРОВАНИЯ УГЛОВОГО БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
RU2047888C1 |
| ДВУХКАНАЛЬНАЯ СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 2000 |
|
RU2171489C1 |
| НЕЛИНЕЙНОЕ КОРРЕКТИРУЮЩЕЕ УСТРОЙСТВО | 1991 |
|
RU2012029C1 |
| Двухканальный интегратор для систем автоматического управления | 1990 |
|
SU1791827A1 |
| Устройство для интегрирования аналогового сигнала | 1989 |
|
SU1695330A1 |
| US 20040133286 A1, 08.07.2004. | |||

