Изобретение относится к способу автоматизированного получения заданной ширины призабойного пространства в действующих очистных забоях, имеющих забойный конвейер, очистной комбайн с барабанным (шнековым) исполнительным органом в качестве добывающей машины, а также гидравлическую щитовую крепь, в подземной разработке месторождений каменного угля.
При управлении действующими очистными забоями во время добычных работ, в общем, речь идет о как можно лучшем использовании имеющихся машинных мощностей в целях предотвращения простоев, при этом по возможности должна присутствовать автоматизация необходимых процессов управления для того, чтобы предотвратить ошибочные человеческие решения. Первые шаги автоматизации управления находятся в разработке или же уже в применении, такие как, например, сенсорное распознание/управление граничного слоя, способ пошагового обучения, распознание и управление обратным путем механизированной крепи, автоматизированное пошаговое перемещение механизированной крепи и автоматическое соблюдение заданного наклона забойного конвейера.
Проблема при автоматизации управления очистным забоем, среди прочего, состоит в том, чтобы обеспечить, что в передней области перекрытия кровли пласта каждой отдельной остове щитовой механизированной крепи имеется достаточная, соответствующая пласту высота, то есть достаточная ширина призабойного пространства для того, чтобы обеспечить прохождение очистного комбайна с барабанным исполнительным органом без помех, так как любое столкновение очистного комбайна с барабанным исполнительным органом с перекрытием кровли пласта остова щитовой механизированной крепи из-за слишком малой ширины призабойного пространства ведет к соответствующим нарушениям в работе или же повреждению средств производства.
Поэтому в основе изобретения лежит задача разработать способ указанного в начале вида, который дает указания на возможное столкновение между очистным комбайном с барабанным исполнительным органом и остовом щитовой механизированной крепи или же помогает предотвратить соответствующие столкновения.
Решение этой задачи следует, включая благоприятные варианты осуществления и усовершенствования изобретения, из содержания формулы изобретения, которая следует за этим описанием.
В частности, изобретение предусматривает способ, в котором посредством по меньшей мере одного закрепленного на основании барабанов очистного комбайна с барабанным исполнительным органом радиолокационного датчика измеряется расстояние между верхней кромкой основания барабанов и нижней стороной при добычной работе соответственно подводящего опору перекрытия кровли пласта щитовой крепи и в качестве фактической величины для проходной высоты очистного комбайна с барабанным исполнительным органом под щитовой крепью вводится в блок вычислительной машины, и там сравнивается с хранимой в памяти заданной величиной, при этом при установленном отклонении формируются управляющие команды для адаптации высоты реза по меньшей мере одного из обоих режущих барабанов очистного комбайна с барабанным исполнительным органом.
С изобретением связано то преимущество, что цель управления - сохранение заданной ширины призабойного пространства во время добычных проходов очистного комбайна с барабанным исполнительным органом - может быть достигнута со сравнительно малыми затратами. Измеренная как расстояние между верхней кромкой основания барабанов и нижней стороной перекрытия кровли пласта щитовой крепи проходная высота является непосредственным мерилом и для ширины призабойного пространства, так как ширина призабойного пространства складывается из проходной высоты и занятых забойным оборудованием и, тем самым, неизменных расстояний до кровли пласта, с одной стороны, и до почвы пласта или же свободно вырезанного барабаном на почве пласта горизонта почвы пласта, с другой стороны. Так, выходящее за пределы проходной высоты расстояние до кровли пласта задано габаритными размерами перекрытия кровли пласта, в то время как расстояние радиолокационных датчиков до горизонта почвы пласта задано конструктивной высотой лежащего на горизонте почвы пласта забойного конвейера и перемещаемого на нем основания барабанов. Таким образом, соответственно измеренная для проходной высоты величина может быть непосредственно привлечена как синоним высоты призабойного пространства. При этом операции по управлению могут проводиться быстрее. Заданная в блоке вычислительной машины заданная величина для ширины призабойного пространства либо задана данными месторождения, то есть прежде всего мощностью пласта, либо определена минимальной проходной высотой забойного оборудования. Также и заданная величина также может быть представлена в зависимости от конструктивных данных забойного оборудования в качестве заданной величины для проходного проема.
Если же во время добычного прохода очистного комбайна с барабанным исполнительным органом устанавливается, что например, также содержащая запас надежности заданная величина проходного проема принижена или же превышена, то из установления отклонения могут быть сформированы управляющие команды, которые так изменяют или же приводят в соответствие общую высоту реза обоих режущих барабанов, что снова достигается заданная, подлежащая соблюдению ширина призабойного пространства. При этом особое преимущество по сравнению с известными способами состоит в незначительном времени простоя на регулирование только двух следующих один за другим добычных проходов, так как тогда забойный конвейер продвинут на свободно вырезанный горизонт почвы пласта, и при этом при следующем проходе очистного комбайна с барабанным исполнительным органом успех регулирования, измеренный на тогда подлежащей заданию проходной высоте, может контролироваться. Это еще имеющееся время простоя на регулирование неизбежно получается из необходимого расстояния между режущими барабанами, забойным конвейером и установленными на движущихся на забойном конвейере основаниях барабанов радиолокационными датчиками.
В соответствии с одним примером осуществления изобретения предусмотрено, что изменение высоты реза производится после завершения добычного хода очистного комбайна с барабанным исполнительным органом вдоль очистного забоя, так что условия во время добычного хода в каждом случае остаются постоянными и в каждом случае имеются в распоряжении для целей сравнения.
В качестве альтернативы может быть предусмотрено, что изменение высоты реза режущих барабанов происходит непрерывно в виде реакции на обнаруженные в блоке вычислительной машины отклонения фактической величины от заданной, посредством этого происходит адаптация к изменениям положения забойного оборудования в данный момент.
В соответствии с одним примером осуществления изобретения на приложенных концах основания барабанов расположены соответственно радиолокационные датчики, при этом соответственно в направлении движения передний радиолокационный датчик выдает фактические сигналы для измеренного расстояния. В качестве альтернативы может быть предусмотрено, что воспринятые обоими радиолокационными датчиками сигналы беспрерывно передаются на блок вычислительной машины и там анализируются, при этом в случае установленного отклонения измеренной передним в направлении движения радиолокационным датчиком проходной высоты от заданной величины сразу формируется управляющая команда для заднего в направлении движения режущего барабана очистного комбайна с барабанным исполнительным органом.
Если в соответствии с одним примером осуществления изобретения предусмотрено, что дополнительно установленные при следующих один за другим добычных проходах соответственно сформированными управляющими командами величины коррекции для высоты реза режущих барабанов сравнивают друг с другом, и установленная из величин коррекции суммарная величина привлекается в качестве меры для начавшейся конвергенции и учитывается при будущих добычных проходах при установлении необходимой адаптации высоты реза, таким образом могут быть сделаны заключения о начавшейся тем временем конвергенции. Если во время первого добычного хода возникает потребность в коррекции высоты реза, то для следующего добычного хода может быть проверено, вырезается ли заданная ширина призабойного пространства после выполнения коррекции. Если при этом снова возникает потребность в коррекции, то она может быть вызвана только начавшейся тем временем конвергенции.
В соответствии с одним примером осуществления изобретения предусмотрено, что определение высоты очистного забоя посредством радиолокационных измерений дополняется тем, что посредством установленных по меньшей мере на трех из четырех основных конструктивных деталей каждого остова щитовой механизированной крепи - опорном полозе, завальном щите, несущих рычагах и области перекрытия кровли пласта со стороны завала - датчиков наклона определяется наклон деталей щитовой крепи относительно горизонтали в направлении пошагового перемещения, и из измеренных данных в блоке вычислительной машины путем сравнения с хранимыми в нем, задающими геометрическое направление деталей и задающими их перемещение во время пошагового перемещения базисными данными соответственно рассчитывается соответствующая пласту высота (h1) остова щитовой механизированной крепи на переднем конце перекрытия кровли пласта в качестве меры для фактической ширины призабойного пространства, и определенные таким образом фактические величины расчета высоты щита подаются на обрабатывающий фактические величины из измерения проходной высоты блок вычислительной машины. В то время как радиолокационное измерение в каждом случае выдает данные только во время прохода добычной машины под соответствующей остовом щитовой механизированной крепи и поэтому слишком малая проходная высота не может быть распознана сразу и учтена при установлении параметров добычи, с дополнительным установлением ширины призабойного пространства посредством регистрации высоты щита связано то преимущество, что полученные таким образом на отдельных остовах щитовой механизированной крепи данные дополнительно разъясняют поведение отдельных участков фронта очистных работ или же всего фронта очистных работ при продвигающейся вперед очистной выемке, в результате чего является возможным интегральное управление процессами соответствующего очистного забоя.
Так, из отношения рассчитанной и измеренной ширины призабойного пространства к относящимся к соответствующему очистному забою данным месторождения, таким как, например, при определенных условиях изменяющаяся по длине очистного забоя мощность пласта, может быть заранее сделано заключение о том, существует ли опасность соударений внутри забойного оборудования в связи с давящей на остов щитовой механизированной крепи кровлей пласта или угрожает ли превышение верхнего предела перестановки остовов щитовой механизированной крепи при являющемся целью автоматическом режиме. Опасность соударения состоит в том, что при начинающейся конвергенции стойки щитовой крепи полностью вдвинуты, и в связи с давящей кровлей пласта остов щитовой механизированной крепи является блокированным и больше не может быть продвинут вперед. Еще одна возможность состоит в том, что стальная конструкция на нижней границе перестановки в лемнискатовом редукторе остова щитовой механизированной крепи или в шарнире перекрытия кровли пласта/обреза пород кровли блокируется и больше не может быть продвинута вперед. Наконец, также может произойти соударение перекрытия кровли пласта остова щитовой механизированной крепи на верхней кромке жерди забойного конвейера, в результате чего передвижение забойного конвейера и/или продвижение остове щитовой механизированной крепи также предотвращается или же по меньшей мере в большой мере затруднено. Вышеуказанные моменты опасности относятся прежде всего к прохождению седловин или впадин в пласте, что можно учитывать заранее за счет соответствующей настройки высоты реза очистного комбайна с барабанным исполнительным органом. Кроме того, соответствующие данные о ширине призабойного пространства могут разъяснить возможное обрушение (осыпь) из кровли пласта, возникновение сужений пласта, «движение по углю» очистного комбайна с барабанным исполнительным органом или же возможный врез в почву пласта очистного комбайна с барабанным исполнительным органом.
Таким образом, регистрация высоты щита дает данные для ожидаемой ширины призабойного пространства в прогнозе, которые затем могут быть сравнены с измеренными очистным комбайном с барабанным исполнительным органом при его проходе данными. При этом могут быть лучше оценены степени точности обоих образов действий. Таким образом, оба образа действий образуют дополнение друг другу, так что при проверке соответствующей ширины призабойного пространства имеется избыточность. Еще одно преимущество состоит в том, что и при отказе одной из обеих систем для задания ширины призабойного пространства добыча может быть продолжена на основании оставшейся измерительной системы.
В этом отношении в соответствии с одним примером осуществления изобретения предусмотрено, что фактические величины из измерения проходной высоты с учетом конструктивной высоты перекрытия кровли пласта и конструкции забойного конвейера и основания барабанов пересчитываются в фактическую ширину призабойного пространства и сравниваются с фактической шириной призабойного пространства как результатом расчета высоты щитовой крепи.
Кроме того, необходимо учитывать то, что наклон режущих барабанов очистного комбайна с барабанным исполнительным органом относительно угольного забоя в направлении выемки может иметь значительную долю при изменении ширины призабойного пространства в результате работы резания. Этот наклон происходит в результате того, что при коррекции высоты реза, прежде всего барабана на почве пласта перед возникшей в результате этого в горизонте почвы пласта ступени, при продвижении забойного конвейера в направлении выемки из-за по сравнению с шириной забойного конвейера с движущимся на нем основанием барабанов меньшей ширины реза режущих барабанов происходит наклон забойного конвейера к почве пласта или же к кровле пласта. При обычных геометрических размерах в рамках применяемого в настоящее время забойного оборудования при угле рассогласования между прохождением пласта и положением забойного конвейера в направлении выемки всего лишь 6 гон получается изменение высоты забоя до 100 мм, которое является исправляемым лишь в рамках дальнейших добычных проходов. Для этого в одном усовершенствовании изобретения предусмотрено, что наклон забойного конвейера и/или очистного комбайна с барабанным исполнительным органом относительно горизонтали в направлении выемки определяется посредством установленных на конвейере и/или очистном комбайне с барабанным исполнительным органом датчиков наклона, при этом может быть предусмотрено, что угол наклона забойного конвейера и/или очистного комбайна с барабанным исполнительным органом приводят в соотношение к установленному на перекрытии кровли пласта остова щитовой механизированной крепи и/или на его опорном полозе углу наклона, и образованный из этого угол рассогласования вовлекают в расчет устанавливающейся при нескольких следующих один за другим циклов пошагового перемещения остова щитовой механизированной крепи фактической ширины призабойного пространства. С этим связано то преимущество, что поведение фронта очистных работ в целом является определяемым заблаговременно, так что посредством своевременного контруправления может быть оказано противодействие негативным влияниям на устанавливающуюся в результате добычных работ ширину призабойного пространства, поскольку в соответствии с одним примером осуществления изобретения предусмотрено, что заданный посредстовом установленного угла рассогласования наклон режущих барабанов очистного комбайна с барабанным исполнительным органом в направлении выемки поперек направления реза учитывается при определении необходимого приведения высоты реза в соответствие.
Относительно устройства для реализации поясненного выше способа предусмотрено, что радиолокационные датчики заделаны заподлицо в поверхность основания барабанов, так что таким образом может быть измерена точная величина для ширины призабойного пространства. Для того чтобы в каждом случае обеспечивать функционирование радиолокационных датчиков, в соответствии с одним примером осуществления изобретения на основании барабанов установлено устройство для промывки водой под высоким давлением для радиолокационных датчиков, которое в соответствии с одним примером осуществления изобретения управляется с помощью реле времени. В альтернативной форме осуществления может быть предусмотрено, что устройство для промывки водой под высоким давлением управляется в зависимости от события, то есть, например, определяется степень загрязнения, и при ограничивающем точность измерения загрязнении происходит включение устройства для промывки водой под высоким давлением.
В альтернативной форме осуществления может быть предусмотрено, что для очистки радиолокационных датчиков предусмотрено механически работающее счищающее устройство. И здесь может быть предусмотрено управление счищающим устройством с помощью реле времени или в зависимости от события. Поскольку в описанном выше примере осуществления расположенные в области поверхности основания барабанов радиолокационные датчики расположены в области основного загрязнения основания барабанов, для уменьшения загрязнения, альтернативно, может быть предусмотрено располагать радиолокационные датчики сбоку на стороне людского ходка машинного корпуса, при этом, предпочтительно, радиолокационные датчики могут быть расположены между расположенными на основании барабанов лебедками и, тем самым, в механически защищенной области. Имея в виду уменьшение загрязнения, может быть предусмотрено, что радиолокационные датчики расположены не с «направлением взгляда» вертикально вверх к перекрытию кровли пласта щитовой механизированной крепи, а под углом к поверхности основания барабанов, так что наклоненная таким образом поверхность радиолокационных датчиков меньше подвержена загрязнению. В ходе обработки полученных от радиолокационных датчиков сигналов в таком случае необходимо учитывать то, что измеренный более длинный путь радиолокационных сигналов преобразуется в вертикальное расстояние между верхней кромкой основания барабанов и нижней стороной перекрытия кровли пласта щитовой крепи.
При этом для повышения точности измерения может быть предусмотрено, что два радиолокационных датчика расположены на расстоянии друг от друга с взаимно противоположным направлением излучения на основании барабанов. В таком случае обе величины времени распространения сигнала могут быть пересчитаны в желаемое определение расстояния, и получающиеся из этого расстояния могут быть приведены в отношение друг к другу.
На чертеже отображены примеры осуществления изобретения, которые описаны ниже. Показано на:
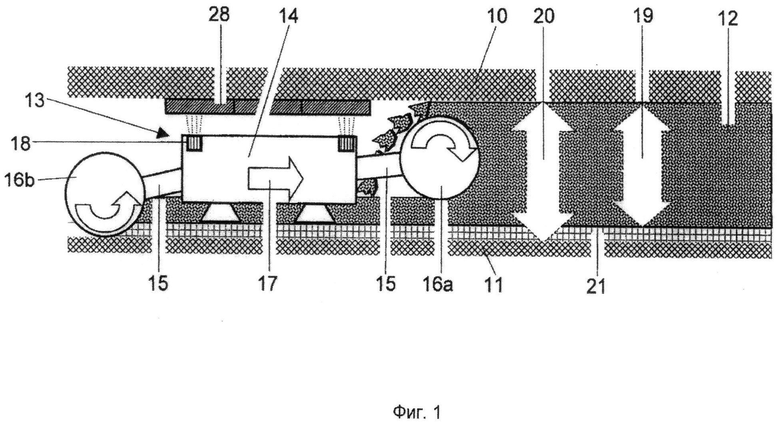
Фиг.1: забойное оборудование с добычной машиной и изображенными лишь с их перекрытиями кровли пласта остовами щитовой механизированной крепи в режиме эксплуатации в схематическом виде спереди при рассмотрении в направлении выемки.
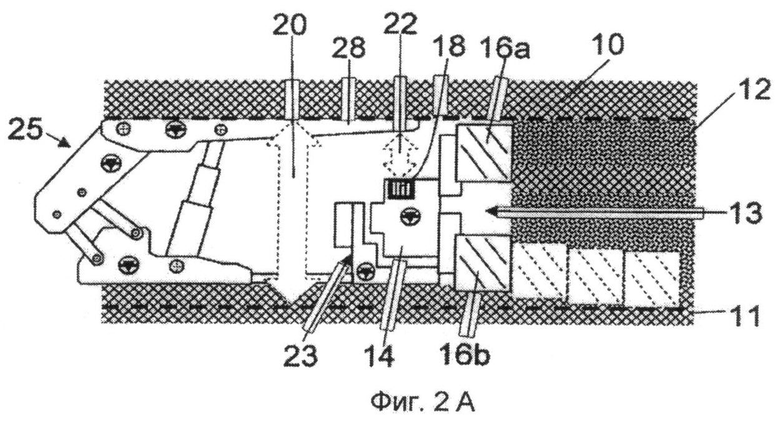
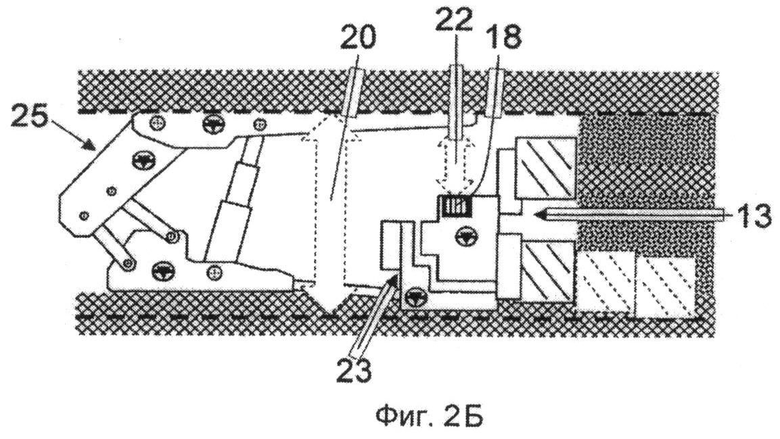
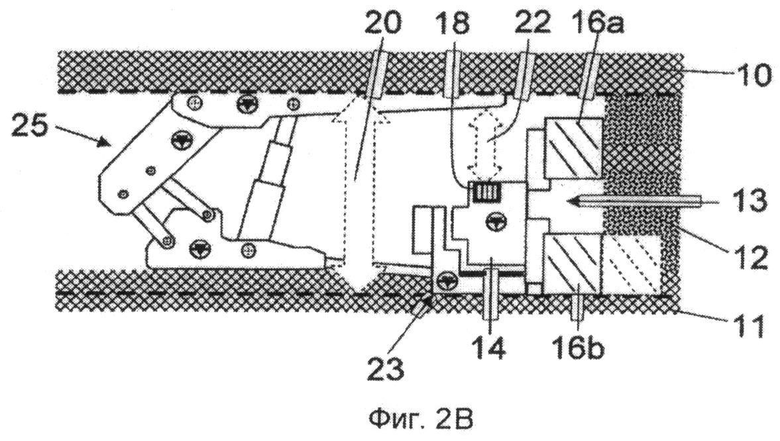
Фиг.2A-2B: забойное оборудование согласно фиг.1 в виде сбоку с произведенным за два следующих один за другим добычных прохода увеличением фактической высоты призабойного пространства.
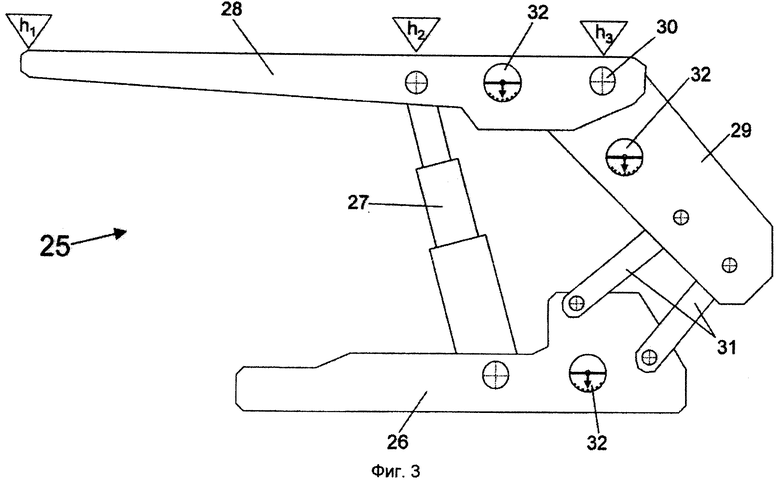
Фиг.3: остов щитовой механизированной крепи с расположенными на ней датчиками наклона в схематическом виде сбоку.
Как следует прежде всего из фиг.1, существующий между кровлей 10 пласта и почвой 11 пласта горизонт 12 пласта разрабатывается с помощью очистного комбайна 13 с барабанным (шнековым) исполнительным органом, который имеет два закрепленных посредством консолей 15 на основании 14 барабанов режущих барабана 16a и 16b. При обозначенном стрелкой 17 направлении движения комбайна 13 с барабанным исполнительным органом вдоль горизонта 12 пласта режущий барабан 16a работает как режущий на горизонте кровли пласта опережающий режущий барабан, в то время как режущий на горизонте почвы пласта режущий барабан 16b работает как запаздывающий режущий барабан. Область кровли пласта горизонта 12 пласта подпирается направленными перпендикулярно направлению 17 движения очистного комбайна 13 с барабанным исполнительным органом остовами 25 щитовой механизированной крепи (фиг.2), от которых на фиг.1 видны только их перекрытия 28 кровли пласта.
Для того чтобы измерять проходную высоту между верхней кромкой основания 14 барабанов и нижней стороной при добычной работе соответственно подводящего опору перекрытия 28 кровли пласта соответствующего остова 25 щитовой механизированной крепи, на основании 14 барабанов расположены два радиолокационных датчика 18, которые заподлицо заделаны в поверхность основания 14 барабанов. Радиолокационные датчики 18 посылают сигналы вертикально вверх в направлении перекрытий 28 кровли пласта и снова принимают отраженные сигналы, так что простым образом может быть определено расстояние между перекрытиями 28 кровли пласта и основанием 14 барабанов, а именно заблаговременно уже во время добычного прохода очистного комбайна 13 с барабанным исполнительным органом. В представленном примере осуществления оба радиолокационных датчика 18 расположены соответственно на переднем и заднем конце основания 14 барабанов и заподлицо заделаны в поверхность основания барабанов. Как более подробно не показано, могут быть предусмотрены соответствующие очистные устройства в виде механических скребков или устройств для промывки водой под высоким давлением.
Как, кроме того, следует из фиг.1, обозначенная стрелкой 19 мощность горизонта 12 пласта меньше, чем обозначенная стрелкой 20 минимальная проходная высота забойного оборудования, так что для получения или же сохранения минимальной проходной высоты 20 запаздывающий режущий барабан 16b выполняет соответственно один врез 21 в почву пласта.
Если известна определенная посредством применения радиолокационных датчиков 18 проходная высота 22 (фиг.2A) между перекрытиями 28 кровли пласта и основанием 14 барабанов, то из нее простым образом определяется фактическая высота призабойного пространства, так как расстояние между верхней кромкой основания 14 барабанов и горизонтом 11 почвы пласта задано фиксированной величиной состоящей из лежащего на горизонте почвы пласта забойного конвейера 23 и движущегося на нем очистного комбайна 13 с барабанным исполнительным органом стальной конструкции.
Как далее представлено на фиг.2, во время добычной работы с помощью радиолокационных датчиков 18 определяется обозначенная стрелкой 22 проходная высота между перекрытием 28 кровли пласта и основанием 14 барабанов, из которой является определяемой существующая между кровлей 10 пласта и почвой 11 пласта фактическая высота призабойного пространства. На фиг.2 видно, что эта фактическая высота призабойного пространства меньше, чем минимальная проходная высота 20 забойного оборудования, так что запаздывающий режущий барабан 16b при каждом добычном ходе должен выполнять соответственно один дополнительный врез в почву пласта для того, чтобы постепенно увеличивать в целом свободно вырезанную высоту призабойного пространства. Как к тому же следует из сравнения фигур 2А-2Б-2В, двумя добычными ходами и, тем самым, двумя резами может быть достигнут желаемый успех регулирования для установки минимальной проходной высоты 20. Поскольку фактически свободно вырезанная высота призабойного пространства при каждом добычном ходе очистного комбайна 13 с барабанным исполнительным органом определяется без какой-либо задержки во времени, одновременно учитывается и кратковременный, обусловленный конвергенцией подъем почвы 11 пласта, так как в каждом случае происходит настройка на фактически свободно вырезанную высоту забоя в свету.
Прежде всего, на фиг.2В видно, что забойный конвейер 23 и движущийся на нем очистной комбайн 13 с барабанным исполнительным органом после двух шагов уже находятся на соответствующем желаемой заданной высоте призабойного пространства уровне почвы пласта, в то время как остовы 25 щитовой механизированной крепи, несмотря на соответствующее подтягивание, еще находятся на первоначальном уровне почвы пласта согласно фиг.2А. Если в соответствии с этим регулировка добычной работы ориентируется по выведенному из положения остовов 25 щитовой механизированной крепи определению фактической высоты призабойного пространства, то это ведет к неправильным результатам или же заключениям, так как и в представленном на фиг.2В положении забойного оборудования определенная на остовах 25 щитовой механизированной крепи высота призабойного пространства все еще классифицируется как слишком малая по отношению к минимальной проходной высоте забойного оборудования с тем последствием, что на очистном комбайне с барабанным исполнительным органом были бы инициированы еще дополнительные врезы в почву пласта для того, чтобы увеличить предположительно еще слишком малую фактическую высоту призабойного пространства, хотя заданная высота призабойного пространства уже достигнута, начиная с показанного на фиг.2В положения очистного комбайна 14 с барабанным исполнительным органом.
Однако управление высотой забоя, помимо применения радиолокационных датчиков на очистном комбайне 13 с барабанным исполнительным органом, может быть дополнено и проверено и улучшено в его регулировочном поведении за счет того, что дополнительно проводится регистрация фактической высоты призабойного пространства также и в области остовов 25 щитовой механизированной крепи. Для этого на каждом остове 25 щитовой механизированной крепи закреплены датчики наклона, так что является возможным, только лишь на основании определяемых со сравнительно малыми затратами геометрических условий при эксплуатации остовов 25 щитовой механизированной крепи определять существующую на переднем конце перекрытия 28 кровли пласта ширину призабойного пространства в виде определенной для этого места соответствующей пласту высоты (h1).
Как можно в этом отношении увидеть на фиг.3, остов 25 щитовой механизированной крепи имеет опорный (скользящий) полоз 26, на котором в параллельном расположении относительно друг друга установлены две стойки 27, из которых на фиг.3 видна только одна и которые на их верхнем конце несут перекрытие 28 кровли пласта. В то время как перекрытие 28 кровли пласта на своем переднем (левом) конце выступает в направлении очистного комбайна 13 с барабанным исполнительным органом, на заднем (правом) конце перекрытия 28 кровли пласта посредством шарнира 30 присоединен завальный щит 29, при этом завальный щит подпирается в виде сбоку двумя покоящимися на опорном полозе 26 несущими рычагами 31. В представленном примере осуществления на остове 25 щитовой механизированной крепи установлено три датчика 32 наклона, а именно один датчик 32 наклона на опорном полозе 26, один датчик 32 наклона в задней области перекрытия 28 кровли пласта поблизости от шарнира 30, и один датчик 32 наклона на завальном щите 29. Как не показано более подробно, на четвертой подвижной детали остове 25 щитовой механизированной крепи - несущих рычагах 31 - тоже может быть предусмотрен датчик наклона, при этом из четырех возможных датчиков 32 наклона в каждом случае должны быть встроены три датчика наклона для того, чтобы с помощью определенных ими величин наклона определять положение остова щитовой механизированной крепи в очистном пространстве. Кроме того, показанный на фиг.3 в задней области перекрытия 28 кровли пласта датчик 32 наклона может быть перемещен в переднюю область перекрытия, если в профиле перекрытия для этого имеется в распоряжении защищенное пространство. В этом отношении, изобретение не ограничено конкретно показанным на фиг.3 расположением датчиков наклона, а охватывает все возможные комбинации датчиков наклона на четырех подвижных деталях остове щитовой механизированной крепи.
Как, кроме того, обозначено на фиг.3, на основании известной кинематики остова 25 щитовой механизированной крепи в зависимости от положения опорного полоза 26, завального щита 29 и перекрытия 28 кровли пласта относительно друг друга могут быть определены высоты h1, h2, а также h3, при этом высота h1 относится к определению соответствующей пласту высоты призабойного пространства, в то время как высота h2 образует меру для возможной чрезмерной высоты при полностью выдвинутой остове щитовой механизированной крепи или же для опасности соударения, в то время как высота h3 может быть привлечена к рассмотрению конвергенции. Определение высот h1, h2 и h3 может происходить на основании измеренных величин датчиков 17 наклона, при этом измеренные этими датчиками 17 величины в не показанном более подробно блоке вычислительной машины сравниваются с хранимыми в нем базисными данными для геометрической ориентации деталей и их характеристики перемещения относительно друг друга. Для этого может быть предусмотрено, что отдельные остовы 25 щитовой механизированной крепи после их встройки в забойное оборудование калибруются за счет того, что перекрытие 28 кровли пласта, завальный щит 29 и опорный полоз 26 посредством ручного инклинометра во встроенном состоянии отмериваются, и измеренные величины вводятся в соответствующий блок управления остовом 25 щитовой механизированной крепи. Поскольку тогда в блоке управления щитовой крепью отображаются значения высот h1, h2 и h3, эти значения высот могут дополнительно измеряться мерными рулетками, и затем датчики наклона могут быть соответственно откалиброваны.
Раскрытые в вышеприведенном описании, формуле изобретения, реферате и на чертежах признаки объекта этих документов могут быть по отдельности, как и в любых сочетаниях друг с другом существенными для реализации изобретения в различных формах его осуществления.
Предложенная группа изобретений относится к горному делу и может быть использована для контроля и регулирования положения рабочего органа очистного комбайна. Техническим результатом является исключение столкновения барабана рабочего органа комбайна и остова щитовой механизированной крепи. Способ автоматизированного получения заданной ширины призабойного пространства заключается в определении расстояния между верхней кромкой основания барабанов и нижней стороной при добычной работе соответственно подводящего опору перекрытия кровли пласта щитовой крепи. При этом указанное расстояние измеряют посредством, по меньшей мере, одного закрепленного на основании барабанов очистного комбайна радиолокационного датчика. В качестве фактической величины для проходной высоты очистного комбайна с барабанным исполнительным органом под щитовой крепью вводят в блок вычислительной машины и сравнивают с хранимой в нем заданной величиной. При этом при установленном отклонении формируют управляющие команды для адаптации высоты реза, по меньшей мере, одного из двух режущих барабанов очистного комбайна. Раскрыто также устройство для реализации предложенного способа, в котором радиолокационные датчики расположены сбоку на стороне людского ходка основания барабанов и могут быть заделаны заподлицо в поверхность основания барабанов. 3 н. и 18 з.п. ф-лы, 5 ил.
1. Способ автоматизированного получения заданной ширины призабойного пространства в имеющих забойный конвейер (23), очистной комбайн (13) с барабанным исполнительным органом в качестве добычной машины, а также гидравлическую щитовую крепь (25) действующих очистных забоях в подземной разработке месторождений каменного угля, в котором посредством по меньшей мере одного закрепленного на основании (14) барабанов очистного комбайна (13) с барабанным исполнительным органом радиолокационного датчика (18) измеряют расстояние (22) между верхней кромкой основания (14) барабанов и нижней стороной при добычной работе соответственно подводящего опору перекрытия (28) кровли пласта щитовой крепи (25), и в качестве фактической величины для проходной высоты (22) очистного комбайна (13) с барабанным исполнительным органом под щитовой крепью вводят в блок вычислительной машины и сравнивают там с хранимой в нем заданной величиной, при этом при установленном отклонении формируют управляющие команды для адаптации высоты реза по меньшей мере одного из обоих режущих барабанов (16a; b) очистного комбайна (13) с барабанным исполнительным органом.
2. Способ по п.1, в котором изменение высоты реза производят после завершения добычного прохода очистного комбайна (13) с барабанным исполнительным органом вдоль забоя.
3. Способ по п.1, в котором изменение высоты реза режущих барабанов (16a, b) происходит непрерывно в виде реакции на обнаруженные в блоке вычислительной машины отклонения фактической величины от заданной.
4. Способ по п.3, в котором на обоих концах основания (14) барабанов расположено по одному радиолокационному датчику (18), и соответственно в направлении движения передний радиолокационный датчик (18) выдает фактические сигналы для измеренного расстояния.
5. Способ по п.3, в котором на обоих концах основания (14) барабанов расположено по одному радиолокационному датчику (18), и принятые обоими радиолокационными датчиками (18) сигналы постоянно передают на блок вычислительной машины и там обрабатывают.
6. Способ по п.4 или 5, в котором в случае установленного отклонения измеренной передним в направлении (17) движения радиолокационным датчиком (18) проходной высоты (22) от заданной величины сразу формируют управляющую команду для заднего в направлении движения режущего барабана (16a, b) очистного комбайна (13) с барабанным исполнительным органом.
7. Способ по одному из пп.1-3, в котором дополнительно установленные при следующих один за другим добычных проходах соответственно сформированными управляющими командами величины коррекции для высоты реза режущих барабанов (16a, b) сравнивают друг с другом, и определенную из величин коррекции суммарную величину привлекают в качестве меры для начавшейся конвергенции, и учитывают при будущих добычных проходах при выявлении необходимой адаптации высоты реза.
8. Способ по п.1, в котором посредством установленных по меньшей мере на трех из четырех основных деталей каждого остова (25) щитовой механизированной крепи, таких как опорный полоз (26), завальный щит (29), несущие рычаги (31), и область перекрытия (28) кровли пласта со стороны завала, датчиков (32) наклона определяют наклон деталей щитовой крепи относительно горизонтали в направлении пошагового перемещения, и из измеренных данных в блоке вычислительной машины посредством сравнения с хранимыми в нем, задающими геометрическое направление деталей и задающими их перемещение во время пошагового перемещения базисными данными рассчитывают в каждом случае соответствующую пласту высоту (h1) остова (25) щитовой механизированной крепи на переднем конце перекрытия (28) кровли пласта в качестве меры для фактической величины ширины призабойного пространства, и определенные таким образом фактические величины расчета высоты щитовой крепи подают на обрабатывающий фактические величины из измерения проходной высоты блок вычислительной машины.
9. Способ по п.8, в котором фактические величины из измерения проходной высоты с учетом конструктивной высоты перекрытия (28) кровли пласта и конструкции забойного конвейера (23) и основания (14) барабанов пересчитывают в фактическую ширину призабойного пространства и сравнивают с фактической шириной призабойного пространства в качестве результата расчета высоты щитовой крепи.
10. Способ по п.1, в котором наклон забойного конвейера (23) и/или очистного комбайна (13) с барабанным исполнительным органом относительно горизонтали в направлении выемки определяют посредством закрепленных на забойном конвейере (23) и/или очистном комбайне (13) с барабанным исполнительным органом датчиков наклона.
11. Способ по п.10, в котором угол наклона забойного конвейера (23) и/или очистного комбайна (13) с барабанным исполнительным органом приводят в соотношение к определенному на перекрытии (28) кровли пласта остова (25) щитовой механизированной крепи и/или на его опорном полозе (26) углу наклона и образованный из этого угол рассогласования вовлекают в расчет устанавливающейся при нескольких следующих один за другим циклов пошагового перемещения остова (25) механизированной крепи фактической ширины призабойного пространства.
12. Способ по п.11, в котором заданный посредстовом установленного угла рассогласования наклон режущих барабанов (16a, b) очистного комбайна (13) с барабанным исполнительным органом в направлении выемки поперек направления реза учитывают при выявлении необходимой адаптации высоты реза.
13. Устройство для реализации способа по одному из пп.1-12, в котором радиолокационные датчики (18) заделаны заподлицо в поверхность основания (14) барабанов.
14. Устройство по п.13, в котором на основании (14) барабанов оборудовано приспособление для промывки радиолокационных датчиков водой под высоким давлением.
15. Устройство по п.14, в котором приспособление для промывки водой под высоким давлением управляется с помощью реле времени.
16. Устройство по п.14, в котором приспособление для промывки водой под высоким давлением управляется в зависимости от события.
17. Устройство по п.13, в котором на основании (14) барабанов установлено механически работающее счищающее устройство.
18. Устройство для реализации способа по одному из пп.1-12, в котором радиолокационные датчики (18) расположены сбоку на стороне людского ходка основания (14) барабанов.
19. Устройство по п.18, в котором радиолокационные датчики (18) в своем положении установлены на уровне системы лебедок на основании (14) барабанов.
20. Устройство по п.18 или 19, в котором радиолокационные датчики (18) расположены под углом к поверхности основания (14) барабанов.
21. Устройство по п.20, в котором два радиолокационных датчика (18) расположены на расстоянии друг от друга с взаимно противоположным направлением излучения на основании (14) барабанов.
| Способ управления очистным комплексом | 1988 |
|
SU1523661A1 |
| Способ автоматического управления комбайном и устройство для его осуществления | 1982 |
|
SU1084441A1 |
| Способ программного управления очистным комбайном в профиле пласта | 1990 |
|
SU1756557A1 |
| Система программного управления очистным комбайном в профиле калийного пласта | 1989 |
|
SU1810534A1 |
| Способ оценки эффективности лечения хронического катарального гингивита у детей | 2019 |
|
RU2714506C1 |
| US 4351565 A1, 28.09.1982 | |||
| DE 102007060170 A1, 03.07.2008. | |||

