Изобретение относится к гироскопической технике, а именно к способам коррекции дрейфа гироскопа с ротором на сферической шарикоподшипниковой опоре.
Известен способ балансировки, при котором вращают ротор, измеряют и корректируют осевой и радиальный дисбаланс [1].
Известно устройство для балансировки [2], содержащее силовой агрегат, средство передачи вращения на ротор, средство балансировки.
Известен способ динамической балансировки гироскопа [3], содержащего статор, ротор на сферической шарикоподшипниковой опоре и датчик угла, включающий в себя вращение ротора, измерение дрейфа и его коррекцию.
Известно устройство для питания синхронного гистерезисного электродвигателя [4], содержащее последовательно включенные между выводами для подключения питания и выводами для подключения двигателя инвертор, задающий генератор.
Общим недостатком приведенных способов и устройств является отсутствие коррекции дрейфа, зависящего от момента вращения электромагнитного поля, создаваемого статором.
Целью изобретений является обеспечение коррекции дрейфа гироскопа, зависящего от момента вращения электромагнитного поля, создаваемого статором, что в конечном счете повышает точностные параметры гироскопического прибора.
В способе коррекции дрейфа гироскопа с синхронным гистерезисным электродвигателем, содержащего статор, ротор на сферической шарикоподшипниковой опоре и датчик угла, включающий в себя вращение ротора, измерение дрейфа и его коррекцию, согласно изобретению в процессе измерения дрейфа гироскопа определяют дрейф, зависящий от момента вращения электромагнитного поля, создаваемого статором, и проводят его коррекцию путем удаления ферромагнитной массы статора в месте, соответствующем направлению дрейфа. Кроме того, согласно изобретению для определения дрейфа, зависящего от момента вращения электромагнитного поля, дрейф гироскопа измеряют дважды, первый раз при работе двигателя в синхронном режиме (ω1), второй раз сразу после отключения питания двигателя и размагничивания гистерезисного кольца ротора (ω2). При этом дрейф гироскопа, зависящий от момента вращения электромагнитного поля (ω), определяют по формуле

и удаляют ферромагнитную массу статора в месте, соответствующем направлению дрейфа, которое определяют по знаку ω (1).
К существенным отличиям предложенного способа относится то, что дрейф гироскопа, зависящий от момента вращения электромагнитного поля, создаваемого статором, измеряют дважды: первый раз при работе двигателя в синхронном режиме (ω1), второй раз сразу после выключения питания двигателя и размагничивания гистерезисного кольца ротора (ω2), затем по формуле определяют дрейф (ω)
ω=ω1-ω2
и удаляют ферромагнитную массу статора в месте, соответствующем направлению дрейфа, которое определяют по знаку ω. Локальное удаление ферромагнитной массы вызывает изменение электромагнитного поля, создаваемого статором, и уменьшение дрейфа гироскопа.
В устройстве для определения дрейфа гироскопа с синхронным гистерезисным электродвигателем, содержащим статор, ротор на сферической шарикоподшипниковой опоре и датчик угла, включающем в себя соединенные последовательно задающий генератор и инвертор, выход которого подключен к электродвигателю гироскопа, измеритель, подключенный к датчику угла, согласно изобретению параллельно питающей шине инвертора подключен конденсатор, а между задающим генератором и инвертором включен переключатель, синхронно связанный с другим переключателем, включенным в разрыв шины питания инвертора.
К существенным отличиям предложенного устройства относится наличие в нем конденсатора, подключенного параллельно питающей шине инвертора, и переключателя, который позволяет одновременно с отключением питания отключить задающий генератор от инвертора. Такое включение обеспечивает размагничивание гистерезисного кольца ротора во время его вращения.
Предложенный способ реализуется следующим образом.
Включают гироскоп в синхронном режиме, запитывая его от источника питания, содержащего включенные последовательно задающий генератор и инвертор, формирующий переменное многофазное напряжение. После полного разгона гироскопа измеряют измерителем на датчике угла величину дрейфа (ω1) гироскопа, затем с помощью переключателя отключают питание инвертора и задающий генератор. При этом заряженный конденсатор сохраняет на короткий промежуток времени напряжение питания инвертора. Так как задающий генератор отключен, на обмотки электродвигателя гироскопа будет подаваться на тот же промежуток времени постоянное напряжение и произойдет размагничивание гистерезисного кольца ротора. Сразу после отключения питания ротор гироскопа продолжает вращаться по инерции (на выбеге) и в это время измеряют измерителем на датчике угла величину дрейфа ω2 гироскопа. После обоих измерений по формуле (1) определяют дрейф (ω) гироскопа, зависящий от момента вращения электромагнитного поля, и проводят его коррекцию путем удаления ферромагнитной массы статора в месте, соответствующем направлению дрейфа.
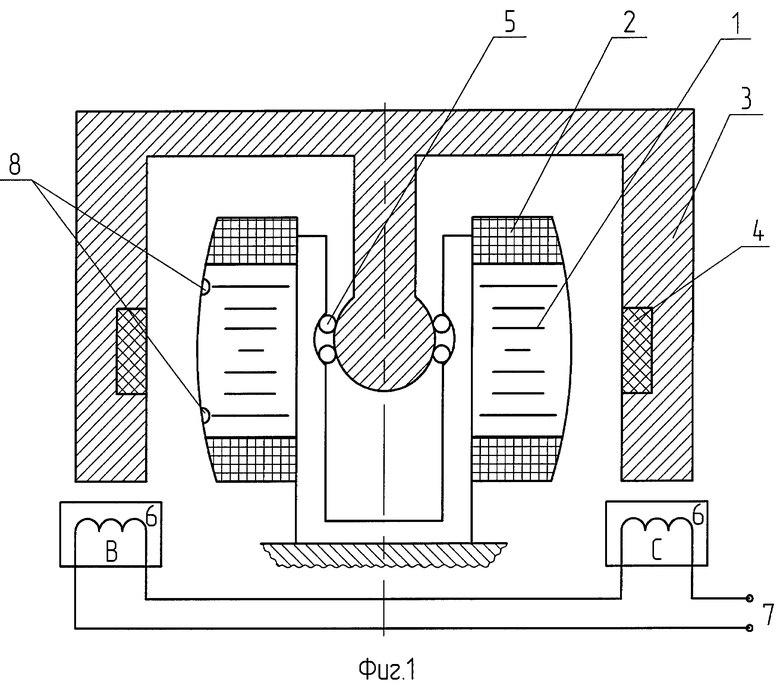
На фиг.1 представлен чертеж гироскопа с ротором на сферической шарикоподшипниковой опоре, поясняющий способ коррекции дрейфа, зависящего от момента вращения электромагнитного поля, создаваемого статором, а на фиг.2 показана структурная схема устройства для определения этого дрейфа.
На фиг.1 представлены статор 1 с обмоткой 2, ротор 3 с гистерезисным кольцом 4, сферическая шарикоподшипниковая опора 5, датчик 6 угла с обмотками В, С и выходом 7, места 8 для удаления ферромагнитной массы статора.
На фиг.1 ротор 3 с гистерезисным кольцом 4 вращается на сферической шарикоподшипниковой опоре 5относительно статора 1, имеющего обмотку 2. Около торцевой поверхности ротора 3 установлен датчик 6 угла, состоящий из двух обмоток В и С, с выхода 7 снимается измеряемый сигнал. На статоре 1 имеются места 8 для удаления ферромагнитной массы.
На фиг.2 представлены задающий генератор 9, инвертор 10, электродвигатель 11, гироскоп 12, датчик 13 угла, измеритель 14, конденсатор 15, переключатели 16, 17.
На фиг.2 выход задающего генератора 9 через переключатель 16 соединен со входом инвертора 10, выход которого подключен к электродвигателю 11 гироскопа 12. Датчик 13 угла подключен к измерителю 14. Параллельно шине питания инвертора 10 подключен конденсатор 15, а питание на инвертор 10 подается через переключатель 17, синхронно связанный с переключателем 16.
Способ коррекции дрейфа гироскопа осуществляется следующим образом.
В процессе изготовления ферромагнитной массы статора 1 в нем могут быть неоднородности, которые вызывают дрейф гироскопа, зависящий от момента вращения электромагнитного поля, создаваемого статором 1. Сначала определяют величину и направление этого дрейфа. Для этого на электродвигатель 11 гироскопа 12 подают с инвертора 10 переменное многофазное напряжение, при этом гироскоп 12 начинает вращаться. После полного разгона гироскопа 12 измеряют на датчике 13 угла измерителем 14 величину дрейфа (ω1) гироскопа 12, затем одновременно отключают с помощью переключателей 16, 17 задающий генератор 9 и питание от инвертора 10. Благодаря наличию конденсатора 15 на шине питания инвертора 10, на нем будет присутствовать в течение короткого промежутка времени напряжение питания, которое затем упадет до нуля. Таким образом, на электродвигателе 11 будет присутствовать короткий импульс постоянного напряжения, которым размагничивается гистерезисное кольцо 4 ротора 3 для того, чтобы исключить влияние электромагнитного поля, создаваемого в обмотке 2 статора 1 при вращении ротора 3 по инерции (на выбеге). При этом на датчике 13 угла измерителем 14 измеряют дрейф (ω2) гироскопа 12 без учета влияния дрейфа, зависящего от момента вращения электромагнитного поля, и по формуле
ω=ω1-ω2
определяют направление и величину дрейфа гироскопа, после чего удаляют ферромагнитную массу статора в месте, соответствующем направлению дрейфа.
Работа устройства для осуществления коррекции дрейфа осуществляется следующим образом.
Сначала переключатели 16 и 17 находятся в замкнутом состоянии. На инвертор 10 поступает питание и он из импульсов, поступающих с задающего генератора 9, формирует многофазное переменное напряжение, которым питается синхронный гистерезисный электродвигатель 11 гироскопа 12. После полного разгона гироскопа 12 измерителем 14 на датчике 13 угла измеряется величина дрейфа ω1. Затем синхронно связанные переключатели 16, 17 размыкают. При этом задающий генератор 9 отключается от инвертора 10 и с него снимается напряжение питания. Но так как параллельно шине питания инвертора 10 подключен конденсатор 15, который был заряжен до величины питающего напряжения, то на шине питания инвертора 10 сохраняется питание на короткий промежуток времени, пока разряжается конденсатор 15. В связи с тем, что задающий генератор 9 отключен от инвертора 10, а питание на нем имеется, то выходное напряжение инвертора 10 становится постоянным, равным амплитуде переменного на момент размыкания переключателей 16, 17. Это постоянное напряжение поступает на обмотку 2 статора 1 синхронного гистерезисного электродвигателя 11 и происходит размагничивание гистерезисного кольца 4 его ротора. Это делается для того, чтобы электромагнитное поле статора не влияло на величину дрейфа гироскопа при вращении ротора по инерции (на выбеге). Сразу после размыкания переключателей 16, 17 на датчике 13
угла измерителем 14 производится измерение дрейфа ω2 гироскопа, затем по формуле
ω=ω1-ω2
определяют величину дрейфа ω, зависящего от момента вращения электромагнитного поля статора, и производят его коррекцию путем удаления ферромагнитной массы статора в месте, соответствующем направлению дрейфа.
Предложенные изобретения использованы для коррекции дрейфа гироскопа, что позволило увеличить его точностные параметры.
Источники информации
1. Патент РФ №1487627, МПК G01M 1/34, 2005 г.
2. Заявка на изобретение РФ №2004132605, МПК G01M 1/30, 2004 г.
3. Патент РФ №2334205, МПК G01M 1/34, 2007 г.
4. Патент РФ №2319283, МПК Н02Р 27/34, 2005 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОРРЕКЦИИ ДРЕЙФА ГИРОСКОПА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2572501C1 |
| Устройство для управления двигателем и коррекции дрейфа гироскопа | 2021 |
|
RU2789116C1 |
| ГИРОСКОП (ВАРИАНТЫ) | 2011 |
|
RU2460040C1 |
| Двухканальный датчик угловой скорости | 2019 |
|
RU2725880C1 |
| АЛГОРИТМ ГАРАНТИРОВАННОГО ТРОГАНИЯ ШАГОВОГО ЭЛЕКТРОДВИГАТЕЛЯ МОДУЛЯЦИОННОГО ГИРОСКОПА | 2008 |
|
RU2391629C2 |
| ГИРОСКОП | 2010 |
|
RU2446382C1 |
| МОДУЛЯЦИОННЫЙ ГИРОСКОП | 2005 |
|
RU2303766C2 |
| СПОСОБ ГИДРОДИНАМИЧЕСКОГО ПОДВЕСА РОТОРА ГИРОМОТОРА ПОПЛАВКОВОГО ГИРОСКОПА (ВАРИАНТЫ) И СПОСОБ ЗАПОЛНЕНИЯ ЦИЛИНДРИЧЕСКОГО ГИДРОДИНАМИЧЕСКОГО ПОДВЕСА РОТОРА ГИРОМОТОРА ПОПЛАВКОВОГО ГИРОСКОПА НЕСМЕШИВАЮЩИМИСЯ ЖИДКОСТЯМИ | 2004 |
|
RU2272252C1 |
| БЕССТУПЕНЧАТЫЙ ЭЛЕКТРОМАШИННЫЙ ГИБРИДНЫЙ ВАРИАТОР С ЦИФРОВЫМ УПРАВЛЕНИЕМ | 2007 |
|
RU2362687C1 |
| ГИРОСКОП | 2019 |
|
RU2728733C1 |

Изобретение относится к гироскопической технике, а именно к коррекции дрейфа гироскопа с ротором на сферической шарикоподшипниковой опоре. Дрейф гироскопа измеряют дважды: при работе двигателя в синхронном режиме (ω1) и сразу после отключения питания двигателя и размагничивания гистерезисного кольца ротора (ω2), а дрейф гироскопа, зависящий от момента вращения электромагнитного поля (ω), определяют по формуле . Удаляют ферромагнитную массу статора в месте, соответствующем направлению дрейфа, которое определяют по знаку ω (1). Устройство для определения дрейфа гироскопа с синхронным гистерезисным двигателем, содержащем статор, ротор на сферической шарикоподшипниковой опоре и датчик угла, включает соединенные последовательно задающий генератор и инвертор, выход которого подключен к электродвигателю гироскопа, измеритель, конденсатор, включенный параллельно питающей шине инвертора, и два переключателя. Изобретение обеспечивает коррекцию дрейфа гироскопа, зависящего от момента вращения электромагнитного поля, создаваемого статором, что в конечном счете повышает точностные параметры гироскопического прибора. 2 н. и 2 з.п. ф-лы, 2 ил.
1. Способ коррекции дрейфа гироскопа с синхронным гистерезисным электродвигателем, содержащим статор, ротор на сферической шарикоподшипниковой опоре и датчик угла, включающий в себя вращение ротора, измерение дрейфа и его коррекцию, отличающийся тем, что в процессе измерения дрейфа гироскопа определяют дрейф, зависящий от момента вращения электромагнитного поля, создаваемого статором, и проводят его коррекцию путем удаления ферромагнитной массы статора в месте, соответствующем направлению дрейфа.
2. Способ коррекции дрейфа гироскопа по п.1, отличающийся тем, что для определения дрейфа, зависящего от момента вращения электромагнитного поля, дрейф гироскопа измеряют дважды: первый раз при работе двигателя в синхронном режиме (ω1), второй раз сразу после выключения питания двигателя и размагничивания гистерезисного кольца ротора (ω2).
3. Способ коррекции дрейфа гироскопа по п.2, отличающийся тем, что дрейф гироскопа, зависящий от момента вращения электромагнитного поля (ω), определяют по формуле и удаляют ферромагнитную массу статора в месте, соответствующем направлению дрейфа, которое определяется по знаку ω (1).
4. Устройство для определения дрейфа гироскопа с синхронным гистерезисным электродвигателем, содержащим статор, ротор на сферической шарикоподшипниковой опоре и датчик угла, включающее в себя соединенные последовательно задающий генератор и инвертор, выход которого подключен к электродвигателю гироскопа, измеритель, подключенный к датчику угла, отличающееся тем, что параллельно питающей шине инвертора подключен конденсатор, а между задающим генератором и инвертором включен переключатель, синхронно связанный с другим переключателем, включенным в разрыв шины питания инвертора.
| US 4351194 А, 28.09.1982 | |||
| СПОСОБ ПИТАНИЯ СИНХРОННОГО ГИСТЕРЕЗИСНОГО ЭЛЕКТРОДВИГАТЕЛЯ С ПЕРЕВОЗБУЖДЕНИЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2319283C2 |
| СПОСОБ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ГИРОСКОПА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2334205C1 |
| СПОСОБ РЕГУЛИРОВКИ ДИНАМИЧЕСКИ НАСТРАИВАЕМОГО ГИРОСКОПА | 2007 |
|
RU2344375C2 |
| СПОСОБ БАЛАНСИРОВКИ | 1987 |
|
SU1487627A1 |
| US 4289998 А, 15.09.1981. | |||

