Изобретение относится к гироскопической технике и может быть использовано при проектировании герметичных газозаполняемых гирокамер гироузлов гироскопических приборов.
Известен негерметичный гироузел (гирокамера с гиромотором), гирокамера которого выполнена с вентиляционными окнами, с гиромотором обращенного типа марки ГМ-4, на котором нанесен несимметричный рисунок в виде спирали для динамической балансировки ротора гиромотора. Данный гироузел широко используется в различного типа гироскопических приборах, например в авиагоризонте АГД-1, центральной гироскопической вертикале ЦГВ различных модификаций (Авиагоризонт дистанционный. АГД-1. Техническое описание и инструкция по эксплуатации. М.: Машиностроение, 1972 г.).
Такая гирокамера не позволяет снимать характеристики гиромотора с анализом влияния ее основных характеристик (зазор между ободом ротора и кожухом гирокамеры, давление газа внутри ее) на механические характеристики гиромотора.
При проектировании гироузлов существенное значение имеют параметры гирокамеры: зазор между ротором и внутренней поверхностью гирокамеры и давление газа, заполняющего ее. Данные параметры существенным образом влияют на технические характеристики гиромотора: время разгона, время выбега, температуру перегрева, потребляемую мощность, которые в свою очередь определяются видом механических характеристик (зависимости электромагнитного момента и момента сопротивления от частоты вращения).
Известен герметичный гироузел, гирокамера которого выполнена герметичной и заполнена гелием или водородом под низким давлением. Конструктивно гирокамера состоит из двух непрозрачных крышек, неподвижно соединенных с цилиндрическим кожухом. Статор гиродвигателя жестко соединен с крышками гирокамеры, а на роторе нанесен несимметричный рисунок для динамической балансировки. На одной крышке впаяны три гермоввода для подвода трехфазного питания к гиромотору и трубка (штуцер) для заполнения гирокамеры газом. Подобные гироузлы широко применяются в авиационных приборах, например гироузел ГУА-2. (Малогабаритная гировертикаль МГВ-1С. Техническое описание и руководство по эксплуатации. М.: Машиностроение. - 1974 г., стр. 12-18).
Данный гироузел, принятый за прототип, имеет тот недостаток, что его гирокамера не позволяет снимать механические характеристики и исследовать влияние зазора между ободом ротора и внутренней поверхностью гирокамеры на технические характеристики гиромотора.
Техническим результатом изобретения является повышение точности определения механических характеристик.
Технический результат достигается тем, что в установке для снятия механических характеристик гиромотора содержащей герметичную гирокамеру, состоящую из двух крышек и цилиндрического кожуха, в которой установлен гиромотор с несимметричным рисунком, нанесенном на боковую поверхность ротора с заданным осевым моментом инерции, одна боковая крышка гирокамеры, размещенная со стороны несимметричного рисунка ротора, выполнена прозрачной, цилиндрический кожух выполнен сменным с переменным внутренним диаметром для изменения зазора между цилиндрической частью ротора и кожухом гирокамеры, а в установку дополнительно введена импульсная лампа, подключенная к выходу управляемого импульсного генератора, вход которого соединен с первым USB портом компьютера, на второй USB порт которого подключен управляемый таймер, выдающий дискретное текущее время в моменты остановок несимметричного рисунка ротора, что соответствует дискретным значениям частоты вращения ротора заданным в памяти компьютера с формированием для режима разгона инерционного момента
определяющего разность моментов Мэм(ωi) - Мс(ωi),
где J - осевой момент инерции ротора; Δωi - заданное приращение частоты вращения для режима разгона; Δti - вычисленное по показаниям таймера приращение времени; Мэм(ωi) - электромагнитный момент гиромотора; Мс(ωi) - момент сопротивления гиромотора; ωi - частота вращения на данном шаге измерения;
и с формированием для режима выбега гиромотора инерционного момента
определяющего только момент сопротивления (-Мс(ωi)) в функции частоты вращения,
где Δωk - заданное приращение частоты вращения для режима выбега; Δtk - вычисленное по показаниям таймера приращение времени для режима выбега;
при этом электромагнитный момент гиромотора равен
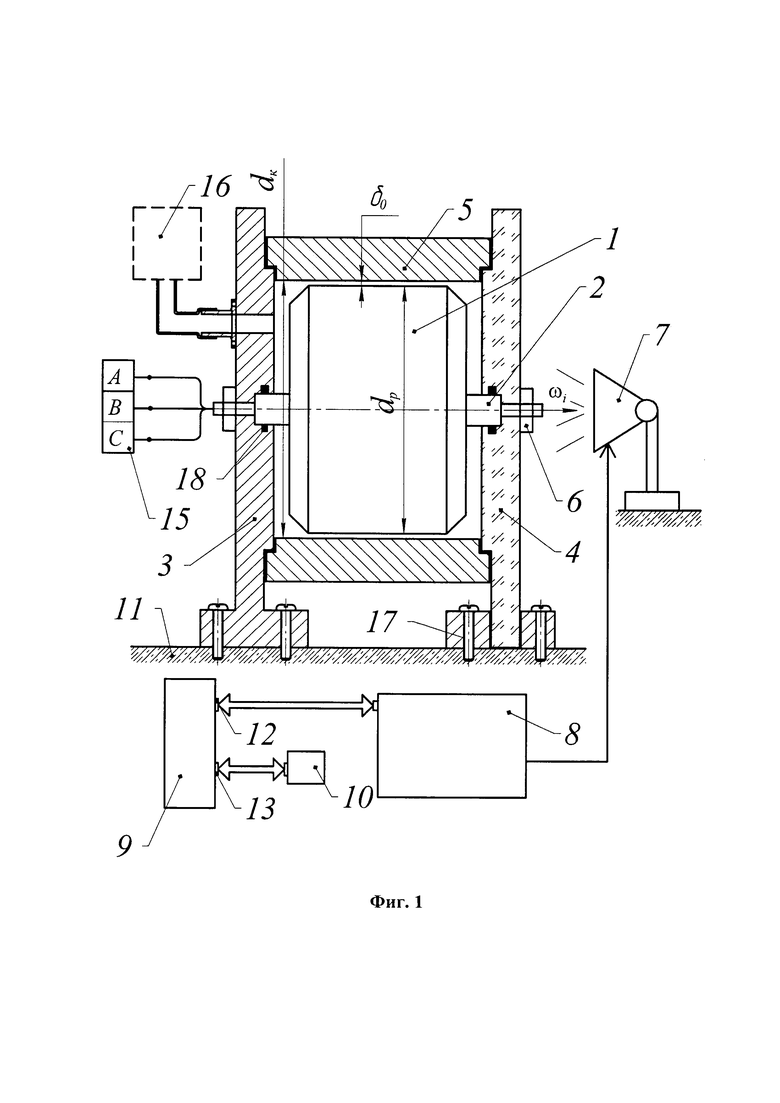
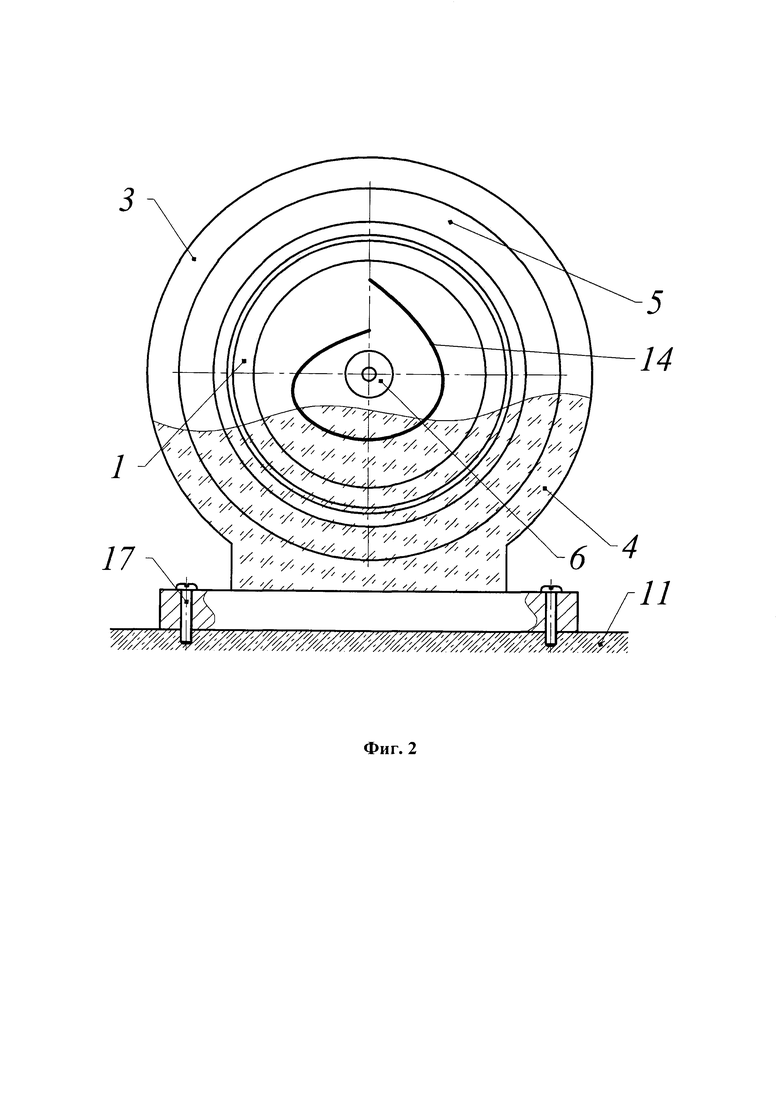
Сущность изобретения поясняется чертежами, представленными на фиг. 1 - фиг. 3, где фиг. 1 - эскиз конструкции гирокамеры установки с функциональными блоками управления, фиг. 2 - вид на гиромотор и гирокамеру со стороны прозрачной крышки, а на фиг. 3 представлены графики моментов, полученные путем обработки измеренной информации в компьютере.
На рисунках приняты следующие обозначения:
1 - ротор гиромотора;
2 - ось статора гиромотора;
3 - крышка гирокамеры металлическая со штуцером;
4 - крышка гирокамеры прозрачная;
5 - кожух гирокамеры цилиндрический;
6 - гайки для крепления оси статора к крышкам;
7 - импульсная лампа;
8 - управляемый импульсный генератор;
9 - компьютер, например, notebook;
10 - управляемый таймер;
11 - основание, к которому крепится гирокамера;
12 - первый USB порт компьютера;
13 - второй USB порт компьютера;
14 - несимметричный рисунок (риска), который нанесен на крышку ротора;
15 - источник трехфазного питания (например, 36В, f=400 Гц);
16 - блок для откачивания воздуха из гирокамеры и заполнения ее газом, например гелием;
17 - винты крепления гирокамеры;
18 - уплотнительные прокладки;
dк - внутренний диаметр кожуха гирокамеры;
dp - внешний диаметр ротора гиромотора;
δ0=(dк-dр)/2 - зазор между ротором и внутренней поверхностью кожуха гирокамеры, может варьироваться за счет замены кожуха гирокамеры.
Установку можно представить в виде двух функциональных блоков: гирокамеры и системы измерения.
Гирокамера с гиромотором образует гироузел и конструктивно выполнены следующим образом (см. фиг. 1):
Гирокамера состоит из двух крышек 3 и 4, которые вставляются в цилиндрический кожух 5.
Крышка 3 выполняется произвольной формы с цилиндрическим посадочным буртиком. Крышка 4 изготавливается из прозрачного материала и имеет аналогичную форму. Гиромотор представляет синхронную или асинхронную трехфазную электрическую машину, построенную по обращенной схеме, т.е. ротор 1 охватывает статор, который устанавливается в гирокамеру посредством крепления оси статора 2 в отверстиях крышек 3 и 4. На боковую поверхность ротора 1 со стороны прозрачной крышки 4 нанесен несимметричный рисунок (риска) 14. На ось статора гиромотора навинчиваются гайки 6 и затягиваются, тем самым обеспечивается фиксация статора гиромотора, кожуха и крышек. Предварительно между крышками вставляется цилиндрический кожух 5, который занимает свое положение за счет буртиков в крышках 3 и 4. Соединения уплотняются прокладками 18 для обеспечения герметичности. Конец полой оси ротора, через которую выходят провода питания гиромотора, заливается компаундом для обеспечения герметичности. Провода обмоток статора подключаются к источнику трехфазного питания 15. Блок 16 по трубке подключается к штуцеру 19 в металлической крышке 3. Гирокамера крепится к основанию 11 с помощью винтов 17 в ножках крышек (крепление показано условно и может быть выполнено иначе).
При этом должна существовать возможность изменять зазор δ0 и давление газа внутри гирокамеры.
Установка является исследовательской. Для изменения зазора между ротором 1 и внутренней поверхностью кожуха 5 гирокамеры последний делается съемным, у которого dк может варьироваться в заданных пределах с целью изменения зазора δ0, влияющего существенным образом на момент аэродинамического сопротивления гиромотора.
Прежде чем подавать питание на гиромотор необходимо сначала с помощью блока 16 откачать воздух из гирокамеры, а затем под определенным давлением заполнить ее газом, например гелием.
Система измерения
Импульсная лампа 7, освещающая гиромотор через прозрачную крышку гирокамеры, питается от управляемого импульсного генератора 8, вход которого соединен с первым USB-портом 12 компьютера 9. При этом может задаваться частота вспышек в пересчете на частоту вращения в диапазоне от 100 об/мин до 30000 об/мин. На второй USB-порт 13 подключается управляемый таймер 10 для передачи дискретного времени в моменты остановок (замирания) несимметричного рисунка 14 ротора 1 (см. фиг. 2).
Режимы работы установки
Установка работает в трех режимах: определение номинальной частоты вращения, разгон гиромотора, выбег гиромотора.
Реализация всех режимов основывается на применении стробоскопического эффекта. При этом предполагаем, что в гирокамере установлен кожух 5 с заданным диаметром dк и она заполнена заданным газом под заданным давлением.
Стробоскопический способ снятия угловой скорости состоит в следующем: если за время между вспышками импульсной лампы укладывается целое число оборотов гиромотора, то ввиду инерционности зрения несимметричное изображение, нанесенное на роторе, покажется остановившимся. В это время оператор нажимает кнопу на таймере, и данные о времени достижения данной скорости заносятся в компьютер.
Определение номинальной скорости вращения гиромотора
На статор подается питание от трехфазного питания стабилизированной частоты и напряжения. Гиромотор начинает набирать обороты и достигает номинальной частоты вращения. После этого с помощью компьютера 9 изменяют частоту импульсного генератора 8 таким образом, чтобы несимметричный рисунок 14 ротора 1 остановился. Записывают данную частоту ni А далее, например, постепенно увеличивая частоту вспышек, замечают следующую подряд идущую частоту ni+1 «замирания» рисунка. Номинальные частота вращения nн и угловая скорость находятся по формулам:
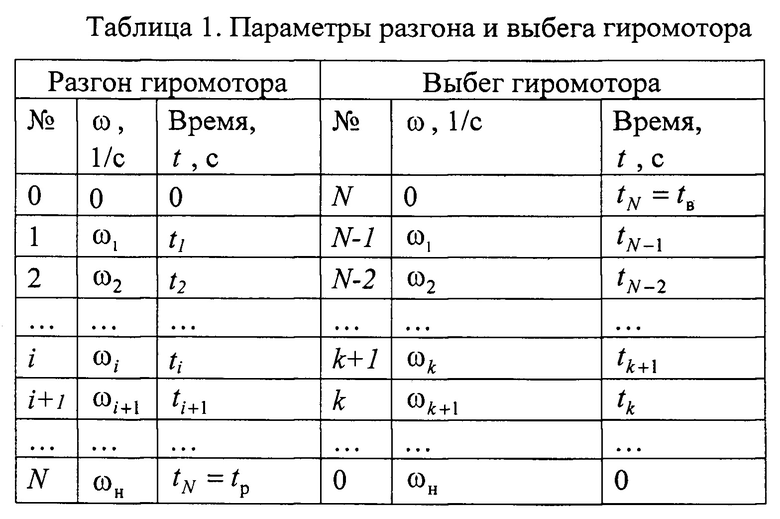
Вычисленную номинальную скорость вращения заносят в таблицу 1.
Снятие характеристики разгона
В режиме измерения параметров разгона устройство работает следующим образом: задается частота вспышек лампы (шаг измерения) n (об/мин) или  ; подается питание гиромотора; гиромотор будет набирать обороты от 0 до nн и при этом будет наблюдаться N остановок несимметричного рисунка в зависимости от заданного шага измерений; при остановке изображения несимметричного рисунка 14 ротора 1 оператор нажимает кнопку на таймере 10; это время ti заносится в память компьютера 9. Следующее время остановки также заносится в таблицу и т.д. Отметки времени будут означать достижение угловой скорости, равной
; подается питание гиромотора; гиромотор будет набирать обороты от 0 до nн и при этом будет наблюдаться N остановок несимметричного рисунка в зависимости от заданного шага измерений; при остановке изображения несимметричного рисунка 14 ротора 1 оператор нажимает кнопку на таймере 10; это время ti заносится в память компьютера 9. Следующее время остановки также заносится в таблицу и т.д. Отметки времени будут означать достижение угловой скорости, равной
где i=1, 2, 3 … - порядковый номер отметки.
Для снятия последней точки быстро задают частоту вспышек импульсной лампы, соответствующую номинальной nн частоте вращения, при остановке несимметричного рисунка оператор нажимает кнопку таймера 10 и в компьютер записывается время разгона tp (см. Таблицу 1).
Снятие характеристики выбега
Схожим образом снимается и характеристика выбега: сначала выбирается частота вспышек лампы (желательно такая же, как при разгоне) только все будет происходить в обратном порядке. При этом частоты вращения ротора при остановках несимметричного рисунка будут такими же, как и при разгоне, а времена значительно отличаться (время выбега в гиромоторах всегда значительно больше времени разгона, что определяется спецификой его работы: временем готовности прибора и назначенным сроком службы). Чтобы записи в таблице 1 были корректными, для формирования массивов при выбеге индекс i заменен на индекс k.
Обработка результатов
Движение гиромотора во время разгона описывается уравнением:

где J - момент инерции ротора относительно оси вращения (известная величина для данного гиромотора); ω - угловая скорость вращения ротора; Мэм(ω) - электромагнитный момент гиромотора как функция от ω; Мс(ω) - момент сил сопротивления как функция от ω. Функция зависимости угловой скорости вращения от времени аппроксимируется до кусочно-линейного вида. Значение производной будет постоянным на линейном участке и будет определяться для точки  середины линейного отрезка
середины линейного отрезка  .
.
Тогда уравнение (1) для режима разгона будет определять инерционный момент:

определяющий разность пока неизвестных моментов Мэм(ωi) - Мс(ωi),
где Δωi - заданное приращение частоты вращения; Δti - вычисленное по показаниям таймера приращение времени для режима разгона; Мэм(ωi) - электромагнитный момент гиромотора (пока неизвестный); Мс(ωi) - момент сопротивления гиромотора (пока неизвестный); ωi - частота вращения на данном шаге измерения (задана в компьютере заранее).
Для режима выбега, когда питание гиромотора отключено (Мэм(ωk)=0), уравнение (1) будет определять момент сопротивления в функции частоты вращения

где Δωk - заданное приращение частоты вращения для режима выбега (рационально принять Δωk=Δωi); Δtk - вычисленное по показаниям таймера приращение времени для режима выбега.
Электромагнитный момент при этом будет равен

Предлагаемое устройство можно применить в исследовательских целях для определения механических характеристик гиромотора (электромагнитного момента и момента сопротивления) при разном зазоре между ротором гиромотора и кожухом, а также при разном давлении газа в гирокамере.
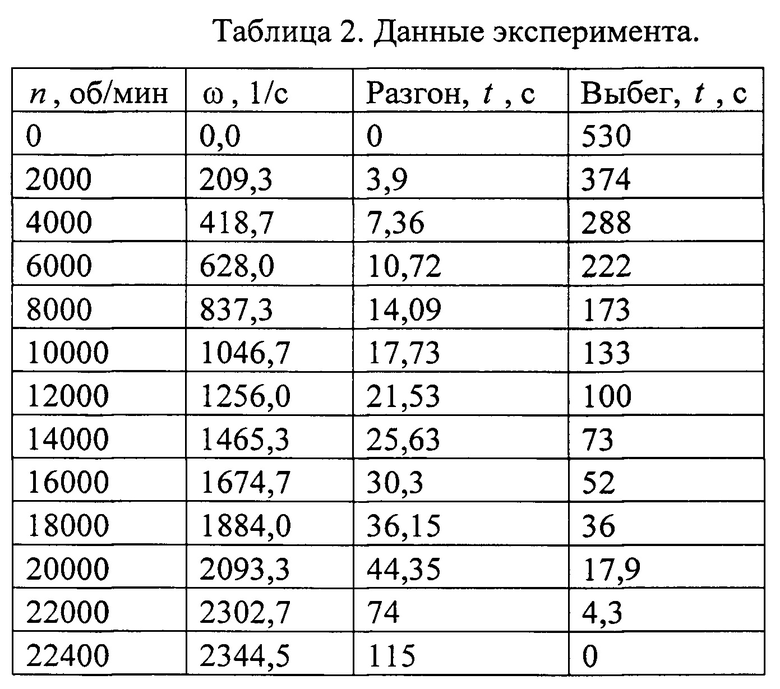
В качестве примера приводятся данные эксперимента, представленные в таблице 2 для гиромотора ГМ-4, вращающегося в воздухе без гирокамеры.
Для нахождения механических характеристик и построения графиков моментов в компьютере формируется файл в виде таблицы 3, составленной в соответствии с формулами (2)-(4) для гиромотора ГМ-4 с моментом инерции ротора J=1,7⋅10-4 Нмс.
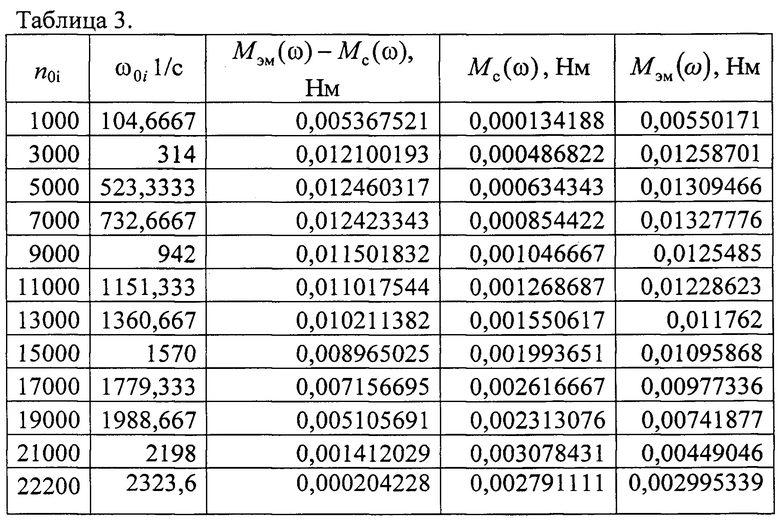
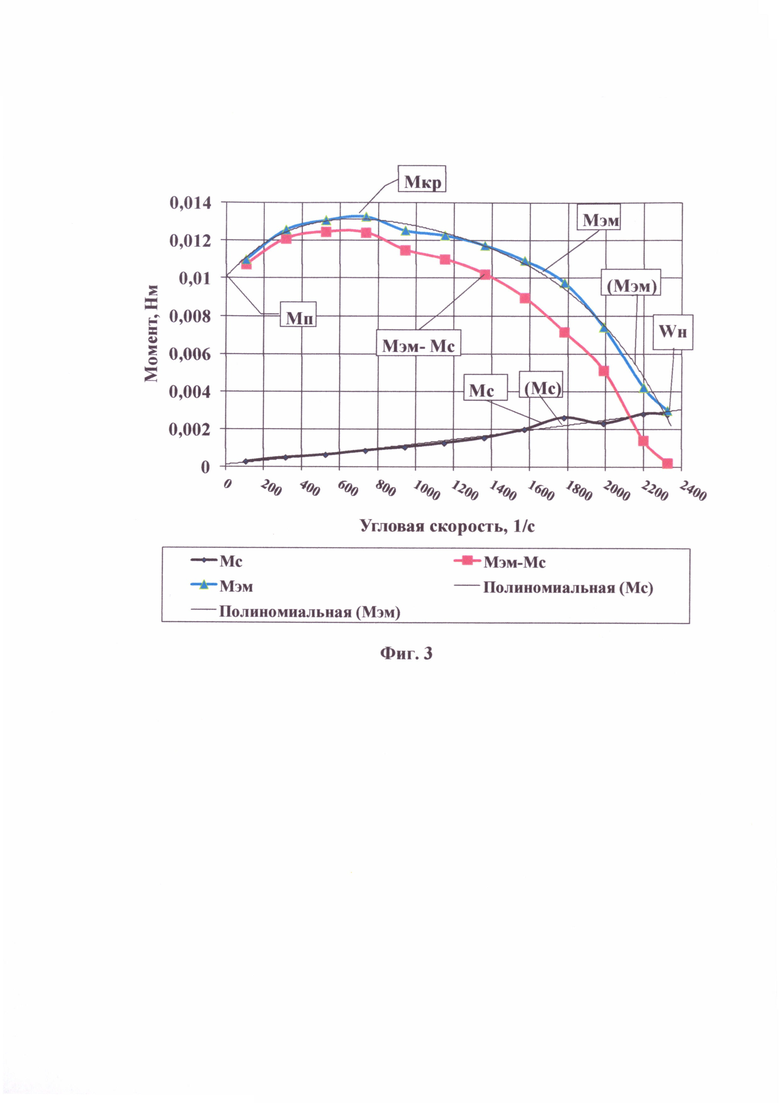
На основе таблицы 3 по точкам строятся графики моментов, представленные на фиг. 3. Для интерпретации полученных данных используется программная интерполяция моментов.
На графике (фиг. 3) изображены кривые момента сопротивления, суммы моментов при разгоне, а также их полиноминальные интерполяции. Точка пересечения интерполяционных линий (ωн на графике) отражает установившееся движение. По графику полиноминальной интерполяции определяется пусковой момент двигателя (случае данного эксперимента Мп ≈ 0,0018 Нм), критический (максимальный) момент (Мкр ≈ 0,0139 Нм).
Устройство не использует контактные методы измерения скорости вращения, что позволяет упростить конструкцию, избавиться от вредных моментов на роторе. Использование стробоскопического измерения скорости вращения, в отличие от электротехнических методов, повышает надежность установки и удешевляет изготовление.
При разработке гирокамеры для конкретного гиромотора с заданным диаметром ротора dp и моментом инерции J необходимо оптимальным образом подобрать внутренний диаметр dк кожуха гирокамеры, выбрать газ, ее заполняющий и его давление.
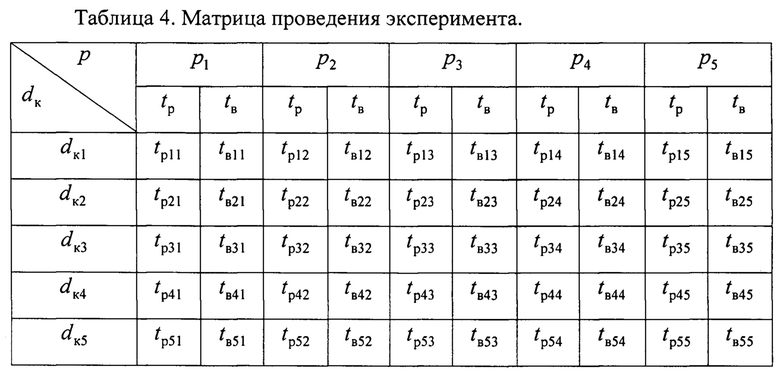
Обычно зазор между ротором и гирокамерой составляет доли миллиметра, задаваемый для конкретного гиромотора диаметром dк, а давление газа р (водорода или гелия) заключается в диапазоне десятков мм. рт. столба. Составив матрицу проведения эксперимента (таблица 4), можно правильно выбрать указанные параметры конструкции по косвенным характеристикам: механическим характеристикам, времени разгона и времени выбега.
По графикам, аналогичным представленным на фиг. 3, можно определить для каждого варианта эксперимента обобщенный показатель - критерий качества гирокамеры
который должен быть максимальным.
Таким образом, установка для снятия механических характеристик гиромотора позволяет экспериментально, качественно и бесконтактным способом определять механические характеристики гиромотора, расположенного в специальной герметичной гирокамере, с целью наилучшим образом определять ее конструктивные параметры: радиальный зазор между ротором и ее кожухом, а также давление газа, которым она заполняется. Полученные конструктивные параметры будут положены в основу проектирования рабочего гироузла для конкретного гироскопического прибора.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДЕМОНСТРАЦИОННЫЙ ГИРОСКОП | 2011 |
|
RU2462761C1 |
| Способ определения погрешности двухстепенного гироблока | 2018 |
|
RU2688915C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕБАЛАНСА ГИРОУЗЛА ВИБРАЦИОННЫМ МЕТОДОМ | 2023 |
|
RU2815479C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВЫХ СКОРОСТЕЙ ПОДВИЖНОГО ОБЪЕКТА С ПОМОЩЬЮ ТРЕХСТЕПЕННОГО ГИРОСКОПА С ЭЛЕКТРИЧЕСКОЙ ПРУЖИНОЙ | 1993 |
|
RU2111455C1 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ ПЕРЕМЕННОЙ СОСТАВЛЯЮЩЕЙ ВЫХОДНОГО СИГНАЛА ЭЛЕКТРОМЕХАНИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ (ДУС) НА ЭТАПЕ ИЗГОТОВЛЕНИЯ ЕГО ГИРОМОТОРА ПО ХАРАКТЕРИСТИКАМ УГЛОВЫХ ВИБРАЦИЙ, ВОЗБУЖДАЕМЫХ ГИРОМОТОРОМ, И УСТАНОВКА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2009 |
|
RU2427801C2 |
| Устройство для измерения угловой скорости | 1991 |
|
SU1793382A1 |
| Гирополукомпас с компенсацией температурного дрейфа | 2024 |
|
RU2818661C1 |
| ДВУХСТЕПЕННОЙ ПОПЛАВКОВЫЙ ГИРОСКОП | 2015 |
|
RU2594628C1 |
| БЕССТУПЕНЧАТЫЙ ЭЛЕКТРОМАШИННЫЙ ГИБРИДНЫЙ ВАРИАТОР С ЦИФРОВЫМ УПРАВЛЕНИЕМ | 2007 |
|
RU2362687C1 |
| СКВАЖИННЫЙ ЗОНД ИЗМЕРИТЕЛЬНОГО КОМПЛЕКСА | 1992 |
|
RU2053358C1 |
Изобретение относится к гироскопической технике и может быть использовано при проектировании герметичных газозаполняемых гирокамер гироузлов гироскопических приборов. Установка для снятия механических характеристик гиромотора содержит герметичную гирокамеру с установленным в ней гиромотором, состоящим из ротора и статора, одна боковая крышка которой, размещенная со стороны несимметричного рисунка, нанесенного на роторе, выполнена прозрачной, цилиндрический кожух гирокамеры выполнен сменным с переменным внутренним диаметром для изменения зазора между цилиндрической частью ротора и кожухом гирокамеры. В установку дополнительно введена импульсная лампа, подключенная к выходу управляемого импульсного генератора, вход которого соединен с первым USB портом компьютера, на второй USB порт которого подключен управляемый таймер, выдающий дискретное текущее время в моменты остановок несимметричного рисунка ротора, что соответствует дискретным значениям частоты вращения ротора, заданным в памяти компьютера с формированием для режима разгона инерционного момента
 ,
,
определяющего разность моментов Мэм(ωi) - Мс(ωi), где J - осевой момент инерции ротора; Δωi - заданное приращение частоты вращения для режима разгона; Δti - вычисленное по показаниям таймера приращение времени; Мэм(ωi) _ электромагнитный момент гиромотора; Мс(ωi) - момент сопротивления гиромотора; ωi - частота вращения на данном шаге измерения; и с формированием для режима выбега гиромотора инерционного момента
 ,
,
определяющего только момент сопротивления - Мс(ωi) в функции частоты вращения, где Δωk - заданное приращение частоты вращения для режима выбега; Δtk - вычисленное по показаниям таймера приращение времени для режима выбега; при этом электромагнитный момент гиромотора равен

Технический результат изобретения – повышение точности определения механических характеристик гирокамеры. 4 табл., 3 ил.
Установка для снятия механических характеристик гиромотора, содержащая герметичную гирокамеру, состоящую из двух крышек и цилиндрического кожуха, в которой установлен гиромотор с несимметричным рисунком, нанесенным на боковую поверхность ротора с заданным осевым моментом инерции, отличающаяся тем, что одна боковая крышка гирокамеры, размещенная со стороны несимметричного рисунка ротора, выполнена прозрачной, цилиндрический кожух выполнен сменным с переменным внутренним диаметром для изменения зазора между цилиндрической частью ротора и кожухом гирокамеры, а установка содержит импульсную лампу, подключенную к выходу управляемого импульсного генератора, вход которого соединен с первым USB портом компьютера, на второй USB порт которого подключен управляемый таймер, выдающий дискретное текущее время в моменты остановок несимметричного рисунка ротора, что соответствует дискретным значениям частоты вращения ротора, заданным в памяти компьютера с формированием для режима разгона инерционного момента
определяющего разность моментов Мэм(ωi) - Мс(ωi),
где J - осевой момент инерции ротора; Δωi - заданное приращение частоты вращения для режима разгона; Δti - вычисленное по показаниям таймера приращение времени; Мэм(ωi) - электромагнитный момент гиромотора; Мс(ωi) - момент сопротивления гиромотора; ωi - частота вращения на данном шаге измерения;
и с формированием для режима выбега гиромотора инерционного момента
определяющего только момент сопротивления (-Мс(ωi)) в функции частоты вращения,
где Δωk - заданное приращение частоты вращения для режима выбега; Δtk - вычисленное по показаниям таймера приращение времени для режима выбега;
при этом электромагнитный момент гиромотора равен
| СИСТЕМА КОНТРОЛЯ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2004 |
|
RU2285237C2 |
| СПОСОБ КОРРЕКЦИИ ПЕРПЕНДИКУЛЯРНОСТИ ОСИ РОТОРА ГИРОСКОПА И ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2000 |
|
RU2175113C1 |
| СТЕНД ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИОННЫХ РЕАКТИВНЫХ МОМЕНТОВ ГИРОМОТОРА | 2012 |
|
RU2518975C2 |
| СПОСОБ КОРРЕКЦИИ ДРЕЙФА ГИРОСКОПА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2572501C1 |
| WO 1980002195 A1, 16.10.1980. | |||

