Настоящее изобретение относится к области применения вращающихся электрических машин. Оно основывается на способе эксплуатации вращающейся электрической машины согласно ограничительной части независимого пункта формулы изобретения.
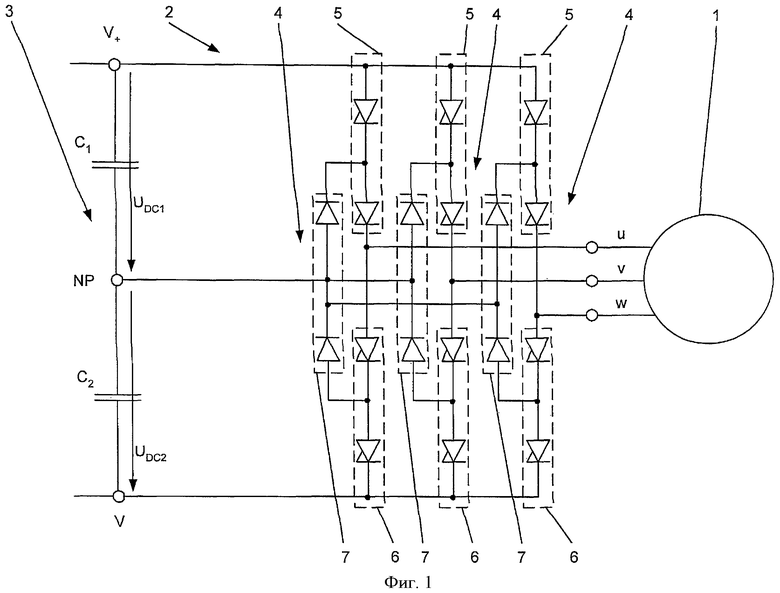
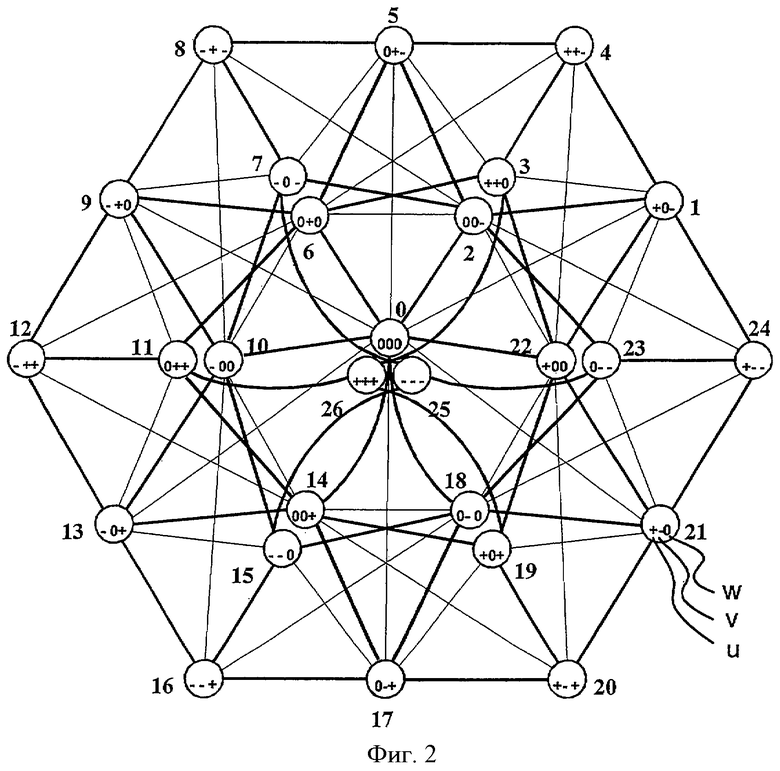
Сегодня схемы частотных преобразователей высокого напряжения имеют много применений. Такая схема частотного преобразователя традиционно рассчитана на три уровня напряжения и часто используется при эксплуатации вращающихся электрических машин, в частности синхронных и асинхронных машин, в которых вращающаяся электрическая машина обычно имеет три обмотки статора. При традиционном способе эксплуатации вращающаяся электрическая машина фазово соединена со схемой частотного преобразователя, включающей в себя контур постоянного напряжения, для формирования в общем случае m уровней напряжения, где m≥2. Контур постоянного напряжения схемы частотного преобразователя для формирования обычно трех уровней напряжения состоит из первого конденсатора, последовательно включенного второго конденсатора, причем контур постоянного напряжения имеет первый главный контакт на первом конденсаторе, второй главный контакт на втором конденсаторе и делительный контакт, реализованный с помощью двух последовательно соединенных конденсаторов. Далее схема частотного преобразователя, применяемая для формирования трех уровней напряжения, имеет силовые полупроводниковые ключи, подключаемые обычным способом. На фиг.1 изображен вариант исполнения традиционной трехфазовой схемы частотного преобразователя для формирования трех уровней напряжения. В соответствии со способом все фазы схемы частотного преобразователя соединены с контуром постоянного напряжения путем выбранной комбинации расположения коммутирующих элементов силовых полупроводниковых ключей схемы частотного преобразователя. В схеме частотного преобразователя для формирования трех уровней напряжения фазы схемы частотного преобразователя соответственно соединены с первым главным контактом, вторым главным контактом или с делительным контактом схемы частотного преобразователя путем выбранной комбинации расположения коммутирующих элементов силовых полупроводниковых ключей. На показанной на фиг.2 диаграмме состояния изображены комбинации положений коммутирующих элементов и переходы между ними, при этом «+» обозначает соединение соответствующей фазы с первым главным контактом, «-» обозначает соединение соответствующей фазы со вторым главным контактом и «0» обозначает соединение соответствующей фазы с делительным контактом.
Выбор соответствующих комбинаций положений коммутирующих элементов выполняется, в частности, по известному принципу «прямого контроля по вращающему моменту» (DTC - Direct Torque Control), при котором текущее фактическое значение вращающего момента вращающейся электрической машины, магнитного потока статора вращающейся электрической машины и потенциала на делительном контакте сначала сравниваются с заданным диапазоном значений. Заданный в каждом случае диапазон значений является или может быть изменяющимся во времени и устанавливается обычно вышестоящим регулирующим контуром на основании опорных значений вращающего момента вращающейся электрической машины, магнитного потока статора вращающейся электрической машины и потенциала на делительном контакте. Если текущее фактическое значение превышает соответствующий диапазон значений, то в зависимости от предшествующей выбранной комбинации положений коммутирующих элементов из таблицы выбирается комбинация положений коммутирующих элементов таким образом, что вытекающее из этой комбинации текущее значение могло бы лежать, по крайней мере, снова в относящемся к нему диапазоне значений, но это не может быть гарантировано. Кроме того, комбинация положений коммутирующих элементов всегда выбирается либо относительно текущего фактического значения вращающего момента, магнитного потока статора либо значения потенциала при превышении соответствующего диапазона значений. Совместное рассмотрение текущего фактического значения вращающего момента, магнитного потока статора и потенциала не выполняется.
Недостатком вышеописанного способа эксплуатации вращающейся электрической машины является то, что между предшествующей выбранной комбинацией положений коммутирующих элементов и текущей выбранной комбинацией положений коммутирующих элементов обычно существует несколько переходов, представленных на фиг.2 в виде линий между комбинациями. Комбинации положений коммутирующих элементов и переходы от одной комбинации к другой обычно жестко записаны в таблице, при этом в таблице обычно сохранены не все возможные комбинации положений коммутирующих элементов в соответствии с фиг.2. Далее, при использовании метода “прямого контроля по вращающему моменту” в зависимости от предшествующей выбранной комбинации положений коммутирующих элементов выбирается только одна комбинация положений коммутирующих элементов с соответствующими переходами, сохраненная в таблице и возвращающая текущее значение, полученное с помощью выбранной комбинации, внутри соответствующего диапазона значений. Те комбинации положений коммутирующих элементов, которые могут быть выбраны альтернативно, в частности, возможно с меньшим количеством переходов к предшествующей выбранной комбинации положений коммутирующих элементов не сохраняются в таблице. Однако наличие нескольких переходов между комбинациями вызывает большое количество коммутационных операций силовых полупроводниковых ключей схемы частотного преобразователя, вследствие чего нарастает частота переключений силовых полупроводниковых ключей. Такая высокая частота переключений вызывает утечки тепла (более высокое энергопотребление) в силовых полупроводниковых ключах схемы частотного преобразователя, вследствие чего силовые полупроводниковые ключи могут быстрее изнашиваться, повреждаться или разрушаться.
Для преодоления этой проблемы в ЕР 1670135 А1 представлен способ эксплуатации вращающейся электрической машины, с помощью которого может быть уменьшена частота переключений силовых полупроводниковых ключей схемы частотного преобразователя для формирования m уровней напряжения, где m≥2, фазово соединенной с вращающейся электрической машиной. В соответствии с изобретением на этапе (а) фазы схемы частотного преобразователя соединяются с контуром постоянного напряжения путем выбранной комбинации расположения коммутирующих элементов силовых полупроводниковых ключей схемы частотного преобразователя. Выбор такой комбинации положений коммутирующих элементов производится в соответствии со следующими этапами:
(b) с начального момента считывания k для выбираемого количества N моментов считывания:
определяют все комбинации положений коммутирующих элементов на каждый момент считывания из N, где N≥1,
(c) формируют последовательности положений коммутирующих элементов для каждой комбинации на начальный момент считывания k, при этом каждая последовательность представляет собой агрегацию соответствующих комбинаций на N моментов считывания, относящихся к соответствующей комбинации на начальный момент считывания k.
(d) для каждой из последовательностей положений коммутирующих элементов рассчитывают траектории вращающего момента и магнитного потока статора вращающейся электрической машины на основании полученных наборов значений состояния вращающейся электрической машины и схемы частотного преобразователя для моментов считывания от начального k до k+N,
(e) выбирают такую последовательность положений коммутирующих элементов, при которой соответствующая траектория вращающего момента и траектория магнитного потока статора на (k+N)-й момент считывания лежит внутри заданного диапазона значений, и устанавливают выбранную последовательность положений коммутирующих элементов,
(f) повторяют этапы с (а) по (d), при этом k=k+1.
При способе эксплуатации вращающейся электрической машины согласно ЕР 1670135 А1 выбирают и устанавливают только одну комбинацию положений коммутирующих элементов, при которой соответствующая траектория вращающего момента и магнитного потока статора на (k+N)-й момент считывания лежит в соответствующем диапазоне заданных значений. Однако возможно, что траектория вращающего момента или магнитная траектория потока статора уже к k-му или (k+1)-му моменту считывания лежит вне заданного диапазона значений, при этом способ эксплуатации вращающейся электрической машины согласно ЕР 1670135 А1 такую ситуацию не решает. Таким образом, возможна только эксплуатация с ограничениями вращающейся электрической машины.
Задача изобретения состоит в создании способа эксплуатации вращающейся электрической машины, благодаря которому можно управлять комбинациями положений коммутирующих элементов с соответствующими траекторией вращающего момента и магнитной траекторией потока статора, лежащими вне диапазона заданных значений. Эта задача решается с помощью признаков пункта 1 формулы изобретения. В зависимых пунктах формулы изобретения представлены предпочтительные улучшенные варианты осуществления изобретения.
При способе эксплуатации вращающейся электрической машины согласно изобретению вращающаяся электрическая машина фазово соединена со схемой частотного преобразователя, включающей контур постоянного напряжения, для формирования m уровней напряжения, где m≥2. В соответствии с изобретением на шаге (а) фазы схемы частотного преобразователя соединяются с контуром постоянного напряжения путем выбранной комбинации расположения коммутирующих элементов силовых полупроводниковых ключей схемы частотного преобразователя. Выбор такой комбинации положений коммутирующих элементов производится в соответствии со следующими этапами:
(b) с начального момента считывания k для выбираемого количества L моментов считывания: определяют все комбинации положений коммутирующих элементов на каждый момент считывания из L, где L≥1;
(c) формируют последовательности положений коммутирующих элементов для каждой комбинации на начальный момент считывания k, при этом каждая последовательность представляет собой агрегацию определенных комбинаций на L моментов считывания, принадлежащих к соответствующей комбинации на начальный момент считывания k; и
(d) рассчитывают траектории вращающего момента и магнитного потока статора вращающейся электрической машины для каждой из последовательностей положений коммутирующих элементов на основании полученных наборов значений состояния вращающейся электрической машины и схемы частотного преобразователя от начального момента считывания k до момента считывания k+L.
Далее в соответствии с изобретением выбирают комбинацию положений коммутирующих элементов в соответствии со следующими этапами:
(e) если траектория вращающего момента к k-му моменту считывания выходит за пределы заданной верхней или заданной нижней границ диапазона значений, рассчитывают значение отклонения вращающего момента относительно верхней и нижней границ диапазона значений от начального момента считывания k до момента считывания k+L,
(e) если магнитная траектория потока статора на k-й момент считывания выходит за пределы заданной верхней или заданной нижней границ диапазона значений, рассчитывают значение отклонения потока статора относительно верхней и нижней границ диапазона значений от начального момента считывания k до момента считывания k+L,
(g) для каждой последовательности положений коммутирующих элементов от начального момента считывания k до момента считывания k+L определяют максимальное из значений отклонения вращающего момента и значений отклонения потока статора,
(h) для каждой последовательности положений коммутирующих элементов находят сумму максимальных значений,
(i) устанавливают ту определенную комбинацию положений коммутирующих элементов на начальный момент считывания k в качестве выбранной комбинации положений коммутирующих элементов, при которой сумма максимальных значений наименьшая,
(f) повторяют этапы с (а) по (i), при этом k=k+1.
В качестве альтернативы вышеописанным этапам от (g) до (i) выбор комбинации положений коммутирующих элементов может также производиться в соответствии со следующими этапами:
(g) для каждой последовательности положений коммутирующих элементов от начального момента считывания k до момента считывания k+L вычисляют сумму значений отклонения вращающего момента и сумму значений отклонения потока статора,
(h) для каждой последовательности положений коммутирующих элементов находят максимальное значение из суммы значений отклонения вращающего момента и суммы значений отклонения потока статора,
(i) устанавливают ту определенную комбинацию положений коммутирующих элементов на начальный момент считывания k в качестве выбранной комбинации положений коммутирующих элементов, при которой это максимальное значение наименьшее.
С помощью этапов с (е) по (j) всегда выбирается оптимальная комбинация положений коммутирующих элементов предпочтительно, когда соответствующая траектория вращающего момента или магнитная траектория потока статора лежат вне диапазона заданных значений. Таким образом, способ согласно изобретению позволяет управлять комбинациями положений коммутирующих элементов с соответствующей траекторией вращающего момента и магнитной траекторией потока статора, которые лежат вне диапазона заданных значений. Вследствие этого впредь возможна неограниченная эксплуатация вращающейся электрической машины.
Эта и другие задачи, преимущества и признаки настоящего изобретения становятся очевидны из дальнейшего подробного описания предпочтительного варианта осуществления изобретения с чертежами.
На фиг.1 изображен вариант исполнения трехфазовой схемы частотного преобразователя для формирования трех уровней напряжения.
На фиг.2 изображена диаграмма состояния с комбинациями положений коммутирующих элементов фаз схемы частотного преобразователя.
На фиг.3 изображен схематический процесс расчетной траектории вращающего момента для L=3 моментов считывания.
Используемые на чертежах ссылочные обозначения и их значения приведены в списке ссылок. В основном одинаковые элементы снабжены одними и теми же ссылочными обозначениями. Описанные варианты осуществления являются примерами предмета изобретения и не имеют ограничивающего действия.
На фиг.1 изображен вариант исполнения трехфазовой схемы 2 частотного преобразователя для формирования трех уровней напряжения, при этом вращающаяся электрическая машина 1 фазово соединена с контуром 3 постоянного напряжения схемы 2 частотного преобразователя. В общем случае вращающаяся электрическая машина 1 может быть соединена со схемой частотного преобразователя для формирования m уровней напряжения, где m≥2. Согласно фиг.1 контур 3 постоянного напряжения реализуется с помощью первого конденсатора C1 и последовательно подключенного конденсатора С2, при этом значение C1 в основном равно С2. Контур 3 постоянного напряжения в соответствии с примерным вариантом исполнения схемы частотного преобразователя для формирования трех уровней напряжения согласно фиг.1 имеет на первом конденсаторе C1 один главный контакт V+, на втором конденсаторе С2 второй главный контакт V- и делительный контакт NP, реализованный с помощью двух последовательно соединенных конденсаторов C1, С2. Кроме того, согласно фиг.1 схема частотного преобразователя имеет для каждой фазы u, v, w систему 4 делительного преобразователя, состоящую из первой коммутационной группы 5, второй коммутационной группы 6 и третьей коммутационной группы 7, причем каждая из групп 5, 6 и 7 состоит из двух последовательно подключенных силовых полупроводниковых ключей. В дальнейшем в каждом устройстве 4 делительного преобразователя первая коммутационная группа 5 соединена с первым главным контактом V+ и вторая коммутационная группа 6 соединена со вторым главным контактом V-. Далее первая коммутационная группа 5 последовательно соединена со второй коммутационной группой 6, при этом точка сопряжения первой коммутационной группы 5 со второй коммутационной группой 6 образует фазный контакт. Третья коммутационная группа 7, выполненная в виде клеммного соединения, соединена с первой коммутационной группой 5, в частности с точкой сопряжения двух последовательно соединенных силовых полупроводниковых ключей первой коммутационной группы 5. Кроме того, третья коммутационная группа 7 соединена со второй коммутационной группой 6, в частности с точкой сопряжения двух последовательно соединенных силовых полупроводниковых ключей второй коммутационной группы 6. Кроме того, третья коммутационная группа 7 соединена с делительным контактом NP, в частности с точкой сопряжения двух последовательно соединенных силовых полупроводниковых ключей третьей коммутационной группы 7. Силовые полупроводниковые ключи первой и второй коммутационных групп 5, 6 согласно фиг.1 выполнены в виде регулируемых двунаправленных ключей, причем ключи третьей коммутационной группы 7 выполнены в виде нерегулируемых однонаправленных ключей. Также возможно исполнение силовых полупроводниковых ключей третьей коммутационной группы 7 в виде регулируемых двунаправленных силовых полупроводниковых ключей. Третья коммутационная группа 7, выполненная в виде клеммного соединения, соединена с первой коммутационной группой 5, в частности с точкой сопряжения двух последовательно соединенных силовых полупроводниковых ключей первой коммутационной группы 5.
Впредь, в соответствии со способом изобретения фазы u, v, w схемы 2 преобразователя, которая представляет собой в общем случае схему 2 преобразователя для формирования m уровней напряжения, на первом этапе (а) связывают с контуром 3 постоянного напряжения путем выбранной комбинации SKak расположения коммутирующих элементов силового полупроводникового ключа схемы 2 преобразователя. Как было упомянуто в начале изложения, на фиг.2 приведен пример диаграммы состояния комбинаций положений коммутирующих элементов схемы 2 преобразователя для формирования m=3 уровней напряжения, при этом «+» обозначает соединение соответствующей фазы u, v, w с первым главным контактом V+, «-» обозначает соединение соответствующей фазы u, v, w со вторым главным контактом V- и «0» обозначает соединение соответствующей фазы u, v, w с делительным контактом NP, и линии, соединяющие комбинации SK положений коммутирующих элементов, обозначают допустимые переходы между комбинациями SK положений коммутирующих элементов. Следует упомянуть, что диаграмма состояния комбинаций положений коммутирующих элементов схемы 2 частотного преобразователя, например, для формирования уровней напряжения m=5 будет выглядеть по-другому. В частности, специалист может реализовать такую схему частотного преобразователя, в которой, исходя из комбинации SK положений коммутирующих элементов, могут быть скоммутированы все возможные коммутируемые комбинации SK положений коммутирующих элементов этой схемы частотного преобразователя без ограничений.
В добавлении к этому, выбор вышеупомянутой комбинации SKa,k положений коммутирующих элементов осуществляется в соответствии со следующими подробно описанными этапами. На этапе (b) начиная с начального момента считывания k из выбираемого количества моментов считывания L определяют все комбинации SKk, …, SKk+L положений коммутирующих элементов на каждом из L моментов считывания, предпочтительно исходя из соответствующих предшествующих комбинаций SKk-1, причем L≥1 и причем первая предшествующая определенная комбинация SKk-1 является предшествующей выбранной комбинацией SKa,k-1 на момент времени k-1. На шаге (с) для каждой определенной комбинации SKk положений коммутирующих элементов на начальный момент считывания k создаются последовательности SSK положений коммутирующих элементов, при этом каждая последовательность SSK представляет собой агрегацию принадлежащих каждой комбинации SKk на начальный момент считывания k комбинаций SKk, …, SKk+L на L моментов считывания. Согласно фиг.2 подобная последовательность SSK положений коммутирующих элементов представляет собой наглядный пример ряда возможных комбинаций SKk, …, SKk+L вдоль принадлежащих линий к одной из возможных комбинаций SKk положений коммутирующих элементов на начальный момент считывания k. На шаге (d) рассчитывают траекторию М вращающего момента и магнитного потока статора (Ф) вращающейся электрической машины 1 для каждой из последовательностей SSK положений коммутирующих элементов на основании полученных наборов значений Xe,k, …, Xe,k+L состояния вращающейся электрической машины 1 и схемы 2 преобразователя от начального момента считывания k до момента считывания k+L. Каждый из вышеуказанных наборов значений состояния Xe,k, …, Xe,k+L может, например, содержать два значения потока статора ФeS1,k, …, ФeS1,k+L; ФеS2,k, …, ФeS2,k+L два значение потока ротора ФеR1,k, …, ФeR1,k+L; ФеR2,k, …, ФeR2,k+L и возможно значение скорости Ve,k, …, Ve,k+L. Для получения наборов значений состояния Хе,k, …, Хе,k+L сначала определяют оба значения потока статора ФeS1,k, ФeS2,k на момент считывания k, оба значения потока ротора ФеR1,k, ФеR2,k на момент считывания k и возможно значение скорости Ve,k на момент считывания k, например, путем измерения или оценки, причем эти значения образуют набор значений состояния Хе,k на момент считывания k. На основании набора значений состояния Хе,k на момент считывания k рассчитываются значения траекторий MT,k; ФT,k вращающего момента М и магнитного потока Ф статора по известной специалистам модели расчетов, описывающей или функционально симулирующей электрическую машину 1 и схему 2 частотного преобразователя. Затем на основании расчетной модели рассчитывают набор значений состояния Хе,k+L на момент считывания k+1 в зависимости от набора значений состояния Хе.k на момент считывания k и полученных комбинаций положений коммутирующих элементов SKk на момент считывания k соответствующей последовательности SSK положений коммутирующих элементов и затем получают значения траекторий MT,k; ФT,kL вращающего момента М и магнитного потока Ф статора на момент считывания k+1. Расчет наборов значений состояния Хе,k+2, …, Хе,k+L для моментов считывания от k+2 до k+L производится аналогично вышеописанному расчету набора значений состояния Хе,k+L, при этом для отдельного расчета наборов значений состояния
Xe,k+2, …, Xe,k+L в каждом случае используются соответствующие предшествующие наборы значений состояния Xe,k+1, …, Xe,k+L-1, а также определенные комбинации положений коммутирующих элементов SKk+1, …, SKk+L-1 на момент считывания от k+1 до k+L-1 соответствующей последовательности SSK положений коммутирующих элементов. Расчет значений траекторий MT,k+2, …, MT,k+L; ФT,k+2, …, ФT,k+L для моментов считывания от k+2 до k+L на основании наборов значений состояния
Хе,k+2, …, Хе,k+L производится аналогично вышеупомянутому расчету значений траекторий MT,k; ФT,k; MT,k+1; ФT,k+1 для моментов считывания k и k+1. В результате вышеописанного расчета значений траекторий MT,k, …, MT,k+L; ФT,k, …, ФT,k+L получают траекторию М вращающего момента и траекторию Ф магнитного потока статора вращающейся электрической машины 1 для каждой последовательности SSK положений коммутирующих элементов, при этом на фиг.3 приведен пример схемы процесса расчета траектории вращающего момента М соответствующей последовательности SSK положений коммутирующих элементов для L=3 моментов считывания и точки траекторий вращающего момента М соответствуют полученным значениям траектории MT,k, …, MT,k+L. Следует упомянуть, что также сначала могут быть получены все наборы значений состояния Xe,k, …, Xe,k+L для моментов считывания от к до k+L в соответствии с вышеописанной процедурой, и затем с их помощью рассчитаны соответствующие значения траекторий MT,k, …, MT,k+L; ФT,k, …, ФT,k+L для моментов считывания от k до k+L для построения траектории М вращающего момента и траектории Ф магнитного потока статора.
В соответствии с изобретением, на следующем этапе (е), если траектория М вращающего момента на момент считывания k выходит за пределы заданной верхней границы yM,max или заданной нижней границы yM,min диапазона значений, рассчитывается значение VM,k, …, VM,k+L отклонения вращающего момента относительно верхней и нижней границ диапазона значений yM,min, yM,max от момента считывания k до момента считывания k+L. Согласно фиг.3 заданный диапазон значений с верхней и нижней границей yM,min, yM,max обозначен двумя пунктирными горизонтальными линиями. Следует упомянуть, что каждый раз заданный диапазон значений является изменяющимся во времени и обычно устанавливается с помощью вышестоящего регулирующего контура на основании опорных значений вращающего момента вращающейся электрической машины 1, причем подобные регулирующие контуры известны специалистам. Далее на этапе (f), если магнитная траектория (Ф) потока статора на k-й момент считывания выходит за пределы заданной верхней yS,max или заданной нижней yS,min границ диапазона значений, рассчитывают значения VS,k, …, VS,k+L отклонения потока статора относительно верхней и нижней границы yS,min, yS,max диапазона значений от начального момента считывания k до момента считывания k+L. На этапе (g) для каждой последовательности SSK положений коммутирующих элементов от начального момента считывания k до момента считывания k+L определяют максимальное значение Vmax из значений VM,k, …, VM,k+L отклонения вращающего момента и значений VS,k, …, VS,k+L отклонения потока статора. На этапе (h) для каждой последовательности SSK положений коммутирующих элементов рассчитывается сумма SVmax максимальных значений Vmax. Далее на этапе (i) устанавливается та определенная комбинация SKk положений коммутирующих элементов на начальный момент считывания k в качестве выбранной комбинации SKa,k положений коммутирующих элементов, при которой сумма SVmax максимальных значений Vmax наименьшая. В качестве альтернативы вышеописанным этапам от (g) до (i) выбор комбинации SKa,k положений коммутирующих элементов может также производиться в соответствии со следующими этапами:
(g) для каждой последовательности SSK положений коммутирующих элементов с начального момента считывания k до момента считывания k+L рассчитывают сумму SM,v значений VM,k, …, VM,k+L отклонений вращающего момента и сумму SS,v значений VS,k, …, VS,k+L отклонений потока статора,
(h) для каждой последовательности SSK положений коммутирующих элементов находят максимальное значение Vmax из суммы SM,V значений VM,k, …, VM,k+L отклонений вращающего момента и суммы SS,V значений VS,k, …, VS,k+L отклонений потока статора,
(i) устанавливают ту определенную комбинацию SKk положений коммутирующих элементов на начальный момент считывания k в качестве выбранной комбинации SKa,k положений коммутирующих элементов, при которой максимальное значение Vmax наименьшее.
Наконец, на этапе (j) повторяют этапы от (а) до (i), при этом k=k+1, т.е. выбор комбинации SKa,k положений коммутирующих элементов производят для k=k+1 в соответствии с вышеописанной процедурой с этапами от (а) до (i). L - константа для каждого этапа от (а) до (j).
С помощью этапов с (е) по (j) всегда выбирается оптимальная комбинация SKa,k положений коммутирующих элементов преимущественно в том случае, когда соответствующая траектория М вращающего момента или магнитная траектория Ф потока статора лежат вне диапазона заданных значений. Таким образом, способ согласно изобретению позволяет управлять комбинациями положений коммутирующих элементов с соответствующими траекторией М вращающего момента и магнитной траекторией Ф потока статора, которые лежат вне диапазона заданных значений. Таким образом, достигается преимущество неограниченной эксплуатации вращающейся электрической машины 1.
Следует упомянуть, что этапы от (а) до (j) могут быть реализованы в виде программного обеспечения и могут быть загружены, например, в компьютерную систему, в частности, с процессором обработки сигналов и запускаться из нее.
Как уже было упомянуто, на фиг.1 изображена схема 2 частотного преобразователя для формирования m=3 уровней напряжения, причем контур 3 постоянного напряжения имеет m-2 делительных контактов NP, т.е. один делительный контакт. В общем случае схема 2 частотного преобразователя для формирования m уровней напряжения, где m≥3, имеет на контуре 3 постоянного напряжения m-2 делительных контактов NP. На этапе (d) способа согласно изобретению это означает, что для каждой последовательности SSK положений коммутирующих элементов рассчитываются m-2 траекторий потенциалов UNP для потенциалов на m-2-ух частичных контактах NP на основании полученных наборов значений состояния Xe,k, …, Xe,k+N вращающейся электрической машины 1 и схемы 2 частотного преобразователя на начальный момент считывания k до момента считывания k+L. Описанный расчет m-2 траекторий потенциала UNP производится аналогично уже рассмотренному расчету траектории М вращающего момента вращающейся электрической машины 1 и траектории Ф магнитного потока статора вращающейся электрической машины 1. Далее для m≥3 на этапе (е), если m-2 траектории потенциала UNP в k-й момент считывания выходят за заданную верхнюю yNP,max или заданную нижнюю yNP,min границы диапазона значений, вычисляется значение VNP,k, …, VNP,k+L отклонения потенциала и для каждой последовательности SSK положений коммутирующих элементов от начального момента считывания k до момента считывания k+L определяется максимальное значение Vmax из значений VNP,k, …, VNP,k+L отклонений потенциала.
Подразумевается, что для m≥3 этапы с (а) по (с) и с (h) по (j) не изменяются. Следует упомянуть, что для m≥3 этапы (d), (е) и (g) также могут быть реализованы в виде программного обеспечения и могут быть загружены, например, в компьютерную систему, в частности, с процессором обработки сигналов и запускаться из нее.
Альтернативно для m≥3 на этапе (g) для каждой последовательности SSK положений коммутирующих элементов от начального момента считывания k до момента считывания k+L на основании значений VNP,k, …, VNP,k+L отклонения потенциала рассчитывается сумма SNP,V и на этапе (h) для каждой последовательности SSK положений коммутирующих элементов рассчитывается максимальное значение Vmax на основании суммы SNP,V значений VNP,k, …, VNP,k+L отклонений потенциала.
Подразумевается, что в альтернативном случае для m≥3 этапы с (а) по (с), с (i) по (j) остаются неизменными и могут быть также реализованы в виде программного обеспечения и загружены, например, в компьютерную систему, в частности, с процессором обработки сигналов и запускаться из нее.
Далее подробно рассказывается о подсчете значений отклонений для вращающего момента VM,k, …, VM,k+L, потока статора VS,k, …, VS,k+L и потенциала VNP,k,…, VNP,k+L. Если траектория М вращающего момента на k-тый момент считывания превышает заданную верхнюю границу yM,max диапазона значений, рассчитывается значение vM,k, …, vM,k+L отклонения вращающего момента относительно верхней и нижней границы yM,min, yM,max диапазона значений от момента считывания k до момента считывания k+L согласно следующей формуле

Если траектория М вращающего момента на k-й момент считывания напротив оказывается меньше заданной нижней границы yM,min диапазона значений, то рассчитывается значение vM,k, …, vM,k+L отклонения вращающего момента относительно верхней и нижней границ yM,min, yM,max диапазона значений от момента считывания k до момента считывания k+L согласно следующей формуле

При этом MT,k, …, MT,k+L - значения траектории вращающего момента М для момента считывания с k до k+L.
Если траектория Ф магнитного потока статора на k-й момент считывания превышает заданную верхнюю границу yS,max диапазона значений, рассчитывается значение vS,k, …, vS,k+L отклонения потока статора относительно верхней и нижней границ yS,min, yS,max диапазона значений от момента считывания k до момента считывания k+L согласно следующей формуле

Если траектория Ф потока статора на k-й момент считывания напротив оказывается меньше заданной нижней границы yS,min диапазона значений, то рассчитывается значение vS,k, …, vS,k+L отклонения вращающего момента относительно верхней и нижней границ yS,min, yS,max диапазона значений от момента считывания k до момента считывания k+L согласно следующей формуле

При этом ФT,k, …, ФT,k+L - значения траекторий Ф магнитного потока статора для периода с момента считывания k до k+L.
Если m-2 траектории потенциала UNP на k-й момент считывания превышают заданную верхнюю границу yNP,max диапазона значений, рассчитывается значение vNP,k, …, vNP,k+L отклонения потенциала относительно верхней и нижней границ yNP,min, yNP,max диапазона значений от момента считывания k до момента считывания k+L согласно следующей формуле

Если m-2 траектории потенциала UNP на k-й момент считывания находятся ниже заданной нижней границы yNP,min диапазона значений, то рассчитывается значение vNP,k, …, vNP,K+L отклонения потенциала относительно верхней и нижней границ yNP,min, yNP,max диапазона значений от момента считывания k до момента считывания k+L согласно следующей формуле

При этом UT,k, …, UT,k+L - значения m-2 траекторий потенциала UNP от момента считывания k до момента считывания k+L.
Ради полноты изложения следует упомянуть, что в общем случае, если соответствующая траектория на k-й момент времени лежит внутри заданных верхней и нижней границ диапазона значений, соответствующее значение отклонения на момент считывания k до момента считывания k+L устанавливается равной нулю.
СПИСОК ССЫЛОК
1 вращающаяся электрическая машина
2 схема частотного преобразователя для формирования трех уровней напряжения
3 контур постоянного напряжения
4 система делительного преобразователя
5 первая коммутационная группа
6 вторая коммутационная группа
7 третья коммутационная группа
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЭКСПЛУАТАЦИИ ВРАЩАЮЩЕЙСЯ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2008 |
|
RU2464699C2 |
| СПОСОБ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ЭЛЕКТРИЧЕСКОЙ МАШИНОЙ | 2011 |
|
RU2547807C2 |
| СПОСОБ КОМБИНИРОВАННОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 1997 |
|
RU2124688C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С СИСТЕМОЙ ИДЕНТИФИКАЦИИ | 2009 |
|
RU2531115C2 |
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ТЕРМОРЕГУЛИРОВАНИЯ РАДИАЦИОННОЙ ПАНЕЛИ КОСМИЧЕСКОГО АППАРАТА | 2015 |
|
RU2586808C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УПРУГИХ СВОЙСТВ ГОРНЫХ ПОРОД НА ОСНОВЕ ПЛАСТОВОЙ АДАПТИВНОЙ ИНВЕРСИИ СЕЙСМИЧЕСКИХ ДАННЫХ | 2012 |
|
RU2526794C2 |
| СПОСОБ СОГЛАСОВАННОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ ТРАНСПОРТНЫХ СРЕДСТВ | 2013 |
|
RU2543434C2 |
| Многорядная замедляющая система штыревого типа | 1984 |
|
SU1256595A1 |
| СПОСОБ УПРАВЛЕНИЯ УБОРКОЙ МЕХАНИЗАЦИИ КРЫЛА САМОЛЕТА ТРАНСПОРТНОЙ КАТЕГОРИИ | 2012 |
|
RU2494922C1 |
| Способ построения трехмерной модели местности вдоль полотна железнодорожного пути | 2020 |
|
RU2726256C1 |
Изобретение относится к области электротехники и может быть использовано во вращающихся электрических машинах. Технический результат - обеспечение управления комбинацией коммутирующих элементов с соответствующими траекторией вращающегося момента и магнитной траекторией потока статора, лежащими вне диапазона заданных значений. В способе эксплуатации вращающейся электрической машины электрическая машина фазово соединяется со схемой частотного преобразователя с контуром постоянного напряжения для формирования минимум двух уровней напряжения. Фазы схемы частотного преобразователя связаны с контуром постоянного напряжения путем выбранной комбинации расположения коммутирующих элементов силового полупроводникового ключа. При эксплуатации вращающейся электрической машины, когда комбинации положений коммутирующих элементов с соответствующими траекториями вращающего момента и магнитного потока статора лежат вне диапазона заданных значений, определяют и суммируют максимальные значения из значений отклонения вращающего момента и потока статора за определенное количество L моментов считывания выбирают такую комбинацию положений коммутирующих элементов, при которой сумма максимальных значений является наименьшей. Альтернативно вычисляют сумму значений превышения вращающего момента и сумму значений превышения потока статора за L моментов считывания и выбирают ту комбинацию положений коммутирующих элементов, при которой максимальное значение является наименьшим. 2 н. и 10 з.п. ф-лы, 3 ил.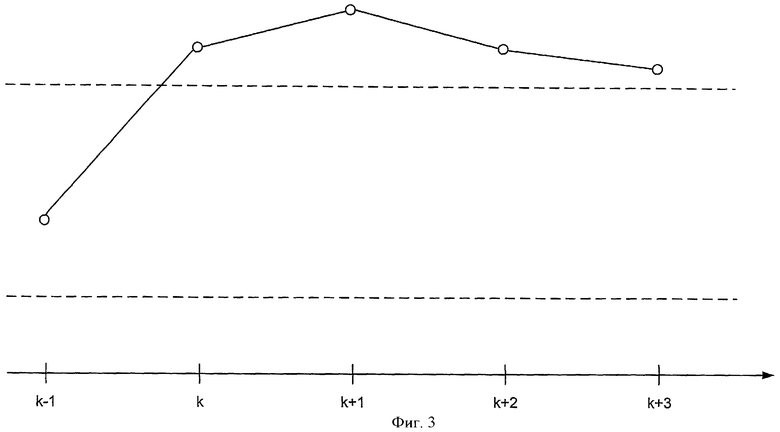
1. Способ эксплуатации вращающейся электрической машины (1), при котором вращающуюся электрическую машину фазово соединяют со схемой (2) преобразователя, включающей контур (3) постоянного напряжения для формирования m уровней напряжения, где m≥2, с помощью следующих этапов:
(a) соединяют фазы (u, v, w) схемы (2) частотного преобразователя с контуром (3) постоянного напряжения путем выбранной комбинации (SKa,k) расположения коммутирующих элементов силового полупроводникового ключа схемы (2) частотного преобразователя, причем выбор комбинации (SKa,k) положений коммутирующих элементов осуществляют посредством следующих этапов:
(b) с начального момента считывания k для выбираемого количества L моментов считывания определяют все комбинации (SKk, …, SKk+L) положений коммутирующих элементов на каждый момент считывания из L, где L≥1,
(c) генерируют последовательность (SSK) положений коммутирующих элементов для каждой комбинации (SKk) на начальный момент считывания k, при этом каждая последовательность (SSK) представляет собой агрегацию принадлежащих соответствующей комбинации (SKk) на начальный момент k всех комбинаций (SKk, …, SKk+L) из L моментов считывания,
(d) для каждой последовательности (SSK) положений коммутирующих элементов производят расчет траектории (M) вращающего момента вращающейся электрической машины (1) и магнитной траектории (Ф) потока статора вращающейся электрической машины (1) на основании полученных наборов значений состояния (Xe,k, …,Хе,k+L) вращающейся электрической машины (1) и схемы (2) частотного преобразователя от начального момента считывания k до момента k+L, отличающийся следующими этапами:
(е) если траектория вращающего момента (М) на k-й момент считывания превышает заданную верхнюю (yM,max) или заданную нижнюю (yM,min) границы диапазона значений, рассчитывают значение (vM,k, …, vM,k+L) отклонения вращающего момента относительно верхней и нижней границ (yM,min, …, yM,max) диапазона значений от момента считывания k до момента считывания k+L,
(f) если магнитная траектория (Ф) потока статора на k-й момент считывания превышает заданную верхнюю (ys,max) или заданную нижнюю (ys,min) границы диапазона значений, рассчитывают значения (vS,k, …, vS,k+L) отклонений потока статора относительно верхней и нижней границ (yS,min, yS,max) диапазона значений от момента считывания k до момента считывания k+L,
(g) для каждой последовательности (SSK) положений коммутирующих элементов от момента считывания k до момента считывания k+L определяют максимальное значение (vmax) из значений отклонения вращающего момента (vM,k, …, vM,k+L) и значений отклонения потока статора (vS,k, …, vS,k+L),
(h) для каждой последовательности (SSK) положений коммутирующих элементов находят сумму (Svmax) максимальных значений,
(i) устанавливают ту определенную комбинацию (SKk) положений коммутирующих элементов на начальный момент считывания k в качестве выбранной комбинации (SKa,k) положений коммутирующих элементов, при которой сумма (Svmax) максимальных значений (vmax) наименьшая,
(j) повторяют этапы с (а) по (i), при этом k=k+1.
2. Способ по п.1, отличающийся тем, что схема (2) частотного преобразователя для формирования m уровней напряжения, где m≥3, имеет m-2 делительных контакта (NP) на контуре (3) постоянного напряжения и на этапе (d) для каждой из последовательностей (SSK) положений коммутирующих элементов дополнительно рассчитывают m-2 траектории потенциала (UNP) для потенциалов на m-2 делительных контактах (NP) на основании полученных наборов значений состояния (Xe,k, …, Xe,k+N) вращающейся электрической машины (1) и схемы (2) частотного преобразователя от начального момента считывания k до момента считывания k+L, на этапе (е), если m-2 траекторий потенциалов (UNP) на k-й момент считывания превышают заданную верхнюю (yNP,max) или заданную нижнюю (yNP,min) границу диапазона значений, для каждой траектории (UNP) потенциала рассчитывают значение (vNP,k, …, vNP,k+L) отклонения потенциала от момента считывания k до момента считывания k+L, и на этапе (g) для каждой последовательности (SSK) положений коммутирующих элементов от момента считывания k до момента считывания k+L дополнительно определяют максимальное значение (vmax) из значений отклонения потенциала (vNP,k, …, vNP,k+L).
3. Способ по п.1 или 2, отличающийся тем, что, если траектория (М) вращающего момента на k-й момент считывания превышает заданную верхнюю границу (yM,max) диапазона значений, рассчитывают значение (vM,k, …, vM,k+L) отклонения вращающего момента относительно верхней и нижней границ (yM,min, yM,max) диапазона значений от момента считывания k до момента считывания k+L согласно следующей формуле:

если траектория (М) вращающего момента на k-й момент считывания лежит ниже заданной нижней границы (yM,min) диапазона значений, рассчитывают значение (vM,k, …, vM,k+L) отклонения вращающего момента относительно верхней и нижней границ (yM,min, yM,max) диапазона значений от момента считывания k до момента считывания k+L согласно следующей формуле:

где MT,k, …, MT,k+L - значения траектории (М) вращающего момента от момента считывания k до момента считывания k+L.
4. Способ по п.1 или 2, отличающийся тем, что, если магнитная траектория (Ф) потока статора на k-й момент считывания превышает заданную верхнюю границу (yS,max) диапазона значений, рассчитывают значение (vS,k, …, vS,k+L) отклонения потока статора относительно верхней и нижней границ (yS,min, yS,max) диапазона значений от момента считывания k до момента считывания k+L согласно следующей формуле:

и если магнитная траектория (Ф) потока статора на k-й момент считывания находится ниже заданной нижней границы (yS,min) диапазона значений, рассчитывают значение (vS,k, …, vS,k+L) отклонения потока статора относительно верхней и нижней границ (yS,min, yS,max) диапазона значений от момента считывания k до момента считывания k+L согласно следующей формуле:

где ФT,k, …, ФT,k+L - значения магнитных траекторий (Ф) потока статора от момента считывания k до момента считывания k+L.
5. Способ по п.3, отличающийся тем, что, если магнитная траектория (Ф) потока статора на k-й момент считывания превышает заданную верхнюю границу (yS,max) диапазона значений, рассчитывают значение (vS,k, …, vS,k+L) отклонения потока статора относительно верхней и нижней границ (yS,min, yS,max) диапазона значений от момента считывания k до момента считывания k+L согласно следующей формуле:

и, если магнитная траектория (Ф) потока статора на k-й момент считывания находится ниже заданной нижней границы (yS,min) диапазона значений, рассчитывают значение (vS,k, …, vS,k+L) отклонения потока статора относительно верхней и нижней границ (yS,min, yS,max) диапазона значений от момента считывания k до момента считывания k+L согласно следующей формуле:

где ФT,k, …, ФT,k+L - значения магнитных траекторий (Ф) потока статора от момента считывания k до момента считывания k+L.
6. Способ по п.2, отличающийся тем, что, если m-2 траектории потенциала (UNP) на k-тый момент считывания превышают заданную верхнюю границу (yNP,max) диапазона значений, расчет значения (vNP,k, …, vNP,k+L) отклонения потенциала относительно верхней и нижней границ (yNP,min, yNP,max) диапазона значений от момента считывания k до момента считывания k+L производят согласно следующей формуле:

и, если m-2 траектории потенциала (UNP) к k-му моменту считывания находятся ниже заданной нижней границы (yNP,min) диапазона значений, рассчитывают значения (vNP,k, …, vNP,k+L) отклонений потенциала относительно верхней и нижней границ (yNP,min, yNP,max) диапазона значений от момента считывания k до момента считывания k+L согласно следующей формуле:

где UT,k, …, UT,k+L - значения m-2 траекторий потенциала (UNP) от момента считывания k до момента считывания k+L.
7. Способ эксплуатации вращающейся электрической машины (1), при котором вращающуюся электрическую машину фазово соединяют со схемой (2) преобразователя, включающей контур (3) постоянного напряжения, для формирования m уровней напряжения, где m≥2, с помощью следующих этапов:
(a) соединяют фазы (u, v, w) схемы (2) частотного преобразователя с контуром (3) постоянного напряжения путем выбранной комбинации (SKa,k) расположения коммутирующих элементов силового полупроводникового ключа схемы (2) частотного преобразователя, причем выбор комбинации (SKa,k) положений коммутирующих элементов осуществляют посредством следующих этапов:
(b) от начального момента считывания k для выбираемого количества L моментов считывания:
определяют все комбинации (SKk, …, SKk+L) положений коммутирующих элементов на каждый момент считывания из L, где L≥1,
(c) генерируют последовательность (SSK) положений коммутирующих элементов для каждой комбинации (SKk) на начальный момент считывания k, при этом каждая последовательность (SSK) представляет собой агрегацию принадлежащих соответствующей комбинации (SKk) на начальный момент k всех комбинаций (SKk, SKk+L) из L моментов считывания,
(d) для каждой последовательности (SSK) положений коммутирующих элементов производят расчет траектории (M) вращающего момента вращающейся электрической машины (1) и магнитной траектории (Ф) потока статора вращающейся электрической машины (1) на основании полученных наборов значений состояния (Xe,k, …, Xe,k+L) вращающейся электрической машины (1) и схемы (2) частотного преобразователя на начальный момент считывания k до момента k+L, отличающийся следующими этапами:
(e) если траектория вращающего момента (М) на k-й момент считывания превышает заданную верхнюю (yM,max) или заданную нижнюю (yM,min) границe диапазона значений, рассчитывают значение (vM,k, …, vM,k+L) отклонения вращающего момента относительно верхней и нижней границ (yM,min, yM,max) диапазона значений от момента считывания k до момента считывания k+L,
(f) если магнитная траектория (Ф) потока статора на k-й момент считывания превышает заданную верхнюю (yS,max) или заданную нижнюю (yS,min) границы диапазона значений, рассчитывают значения (vS,k, …, vS,k+L) отклонений потока статора относительно верхней и нижней границы (yS,min, yS,max) диапазона значений от момента считывания k до момента считывания k+L,
(g) для каждой последовательности (SSK) положений коммутирующих элементов от момента считывания k до момента считывания k+L рассчитывают сумму (SM,v) из значений отклонения вращающего момента (vM,k, …, vM,k+L) и сумму (SS,v) из значений отклонения потока статора (vS,k, …, vS,k+L),
(h) для каждой последовательности (SSK) положений коммутирующих элементов находят максимальное значение (vmax) из суммы (SM,v) значений отклонения вращающего момента (vM,k, …, vM,k+L) и суммы (SS,v) значений отклонения потока статора (vS,k, …, vS,k+L),
(i) устанавливают ту определенную комбинацию (SKk) положений коммутирующих элементов на начальный момент считывания k в качестве выбранной комбинации (SKa,k) положений коммутирующих элементов, при которой максимальное значение (vmax) наименьшее,
(j) повторяют этапы с (а) по (i), при этом k=k+1.
8. Способ по п.7, отличающийся тем, что схема (2) частотного преобразователя для формирования m уровней напряжения, где m≥3, имеет m-2 делительных контакта (NP) на контуре (3) постоянного напряжения и на этапе (d) для каждой из последовательностей (SSK) положений коммутирующих элементов дополнительно рассчитывают m-2 траектории потенциала (UNP) для потенциалов на m-2 делительных контактах (NP) на основании полученных наборов значений состояния (Xe,k, …, Xe,k+N) вращающейся электрической машины (1) и схемы (2) частотного преобразователя от начального момента считывания k до момента считывания k+L, на этапе (е), если m-2 траектории потенциалов (UNP) на k-й момент считывания превышают заданные верхнюю (yNP,max) или нижнюю (yNP,min) границу диапазона значений, для каждой траектории (UNP) потенциала рассчитывают значение (vNP,k, …, vNP,k+L) отклонения потенциала от момента считывания k до момента считывания k+L, и на этапе (g) для каждой последовательности (SSK) положений коммутирующих элементов от момента считывания k до момента считывания k+L дополнительно определяют максимальное значение (vmax) из значений отклонений потенциала (vNP,k, …, vNP,k+L), и на этапе (h) для каждой последовательности (SSK) положений коммутирующих элементов дополнительно определяют максимальное значение (vmax) из суммы (SNP,v) значений отклонений потенциала (vNP,k, …, vNP,k+L).
9. Способ по п.7 или 8, отличающийся тем, что, если траектория (М) вращающего момента на k-тый момент считывания превышает заданную верхнюю границу (yM,max) диапазона значений, рассчитывают значение (vM,k, …, vM,k+L) отклонения вращающего момента относительно верхней и нижней границ (yM,min,·yM,max) диапазона значений от момента считывания k до момента считывания k+L согласно следующей формуле:

если траектория (М) вращающего момента на k-й момент считывания лежит ниже заданной нижней границы (yM,min) диапазона значений, рассчитывают значение (vM,k, …, vM,k+L) отклонения вращающего момента относительно верхней и нижней границы (yM,min, yM,max) диапазона значений от момента считывания k до момента считывания k+L согласно следующей формуле:

где MT,k, …, MT,k+L - значения траектории (М) вращающего момента от момента считывания k до момента считывания k+L.
10. Способ по п.7 или 8, отличающийся тем, что, если магнитная траектория (Ф) потока статора на k-й момент считывания превышает заданную верхнюю границ (yS,max) диапазона значений, рассчитывают значение (vs,k, …, vs,k+L) отклонения потока статора относительно верхней и нижней границ (yS,min, yS,max) диапазона значений от момента считывания k до момента считывания k+L согласно следующей формуле:

и, если магнитная траектория (Ф) потока статора на k-й момент считывания находится ниже заданной нижней границы (yS,min) диапазона значений, рассчитывают значение (vS,k, …, vS,k+L) отклонения потока статора относительно верхней и нижней границ (yS,min, yS,max) диапазона значений от момента считывания k до момента считывания k+L согласно следующей формуле:

где ФT,k, …, ФT,k+L - значения магнитных траекторий (Ф) потока статора от момента считывания k до момента считывания k+L.
11. Способ по п.9, отличающийся тем, что, если магнитная траектория (Ф) потока статора на k-й момент считывания превышает заданную верхнюю границу (yS,max) диапазона значений, рассчитывают значение (vS,k, …, vS,k+L) отклонения потока статора относительно верхней и нижней границ (yS,min, yS,max) диапазона значений от момента считывания k до момента считывания k+L согласно следующей формуле:

и, если магнитная траектория (Ф) потока статора на k-й момент считывания находится ниже заданной нижней границы (yS,min) диапазона значений, рассчитывают значение (vS,k, …, vS,k+L) отклонения потока статора относительно верхней и нижней границ (yS,min, yS,max) диапазона значений от момента считывания k до момента считывания k+L согласно следующей формуле:

где ФT,k, …, ФT,k+L - значения магнитных траекторий (Ф) потока статора от момента считывания k до момента считывания k+L.
12. Способ по п.8, отличающийся тем, что, если m-2 траектории потенциала (UNP) на k-й момент считывания превышают заданную верхнюю границу (yNP,max) диапазона значений, расчет значения (vNP,k, …, vNP,k+L) отклонения потенциала относительно верхней и нижней границ (yNP,min, yNP,max) диапазона значений от момента считывания k до момента считывания k+L производят согласно следующей формуле:

и, если m-2 траектории потенциала (UNP) к k-му моменту считывания находятся ниже заданной нижней границы (yNP,min) диапазона значений, рассчитывают значения (vNP,k, …, vNP,k+L) отклонений потенциала относительно верхней и нижней границ (yNP,min, …, yNP,max) диапазона значений от момента считывания k до момента считывания k+L согласно следующей формуле:

где UT,k, …, UT,k+L - значения m-2 траекторий потенциала (UNP) от момента считывания k до момента считывания k+L.
| СПОСОБ АСИНХРОННОГО ШИРОТНО-КОДОВОГО УПРАВЛЕНИЯ ТИРИСТОРНЫМ ПРЕОБРАЗОВАТЕЛЕМ ДЛЯ ЭЛЕКТРОПРИВОДА | 1991 |
|
RU2022441C1 |
| СПОСОБ АСИНХРОННОГО ШИРОТНО-КОДОВОГО УПРАВЛЕНИЯ ПОЛУПРОВОДНИКОВЫМ ПРЕОБРАЗОВАТЕЛЕМ ДЛЯ ЭЛЕКТРОПРИВОДА | 1991 |
|
RU2025032C1 |
| СПОСОБ СОВМЕСТНОГО УПРАВЛЕНИЯ РЕВЕРСИВНЫМ ВЕНТИЛЬНЫМ ПРЕОБРАЗОВАТЕЛЕМ БЕЗ УРАВНИТЕЛЬНЫХ ТОКОВ | 2002 |
|
RU2235409C1 |
| Скважинный фильтр | 1985 |
|
SU1288285A1 |
| US 20060197491 А1, 07.08.2006 | |||
| JP 2001268936 A, 26.09.2001 | |||
| Пневматический валкователь фрезерного торфа | 1989 |
|
SU1670135A1 |
| Устройство для управления автооператорами гальванических линий | 1979 |
|
SU877474A1 |

