Область техники, к которой относится изобретение
Изобретение относится к мобильным телефонам с навигационным устройством, способу инициализации корректирующих значений и функции навигации и, например, может быть применено в навигационном устройстве, которое может определить азимут с помощью геомагнитного датчика.
Уровень техники
До настоящего времени были широко распространены навигационные устройства, установленные в автомобилях или подобных средствах передвижения, указанные навигационные устройства вычисляют текущее местоположение исходя из GPS (глобальная система позиционирования) сигнала, передаваемого от GPS спутника, и показывают местоположение автомобиля и направление движения на экране с картой.
Также существуют навигационные устройства, называемые ПНУ (персональное навигационное устройство), которые пользователь может легко переносить между автомобилем и домом, или подобным образом, или между автомобилями и которые могут показывать экран с картой или выполнять подобные функции даже при их перемещении.
Было предложено ПНУ, содержащее встроенный геомагнитный датчик, который определяет геомагнетизм, вычисляет направление на основе результатов определения геомагнетизма и показывает экран с картой, который соответствует направлению (см., например, нерассмотренную заявку на японский патент №2008-076374).
Кроме ПНУ существуют портативные электронные устройства, такие как мобильные телефоны, с функциями проведения измерений, функциями показа карт или подобными функциями, указанные устройства дополнительно содержат геомагнитный датчик и показывают экран с картой, соответствующий направлению.
На геомагнитные датчики оказывает влияние находящееся рядом магнитное поле от таких магнитных материалов, как металл, или подобных, и, кроме того, даже в случае, когда изменяется намагниченность металлической части, такой как защитная пластина, или подобного элемента, расположенного в ПНУ, указанное изменение также может оказывать влияние на геомагнитные датчики.
Следовательно, при начале вычисления направления с помощью геомагнитного датчика, ПНУ осуществляет заранее заданный процесс инициализации (например, регулировку корректирующих значений и тому подобное), при этом направление может быть надлежащим образом вычислено на основе сигналов, полученных от геомагнитного датчика.
С другой стороны, существуют ПНУ, которые могут переводиться в состояние ожидания, когда работает только часть внутренних контуров и прочего, это состояние имеет место тогда, когда пользователь временно не использует устройство и в подобных случаях, что аналогично компьютерам общего пользования или подобным устройствам.
После осуществления заранее заданных операций возврата, ПНУ, которое было переведено в состояние ожидания, не выполняет процесс инициализации и подобные процессы, которые выполняются при обычном запуске, возвращается в рабочее состояние, непосредственно предшествующее переводу в состояние ожидания, и может немедленно продолжить работу.
Тем не менее, существуют случаи, когда во время возврата из состояния ожидания ПНУ было перемещено в место, которое отличается от места нахождения, где произошел переход в состояние ожидания, и в котором окружающее магнитное поле отличается, и существуют случаи, когда при переведении в состояние ожидания на ПНУ действует окружающее магнитное поле и изменяется намагниченность внутренних металлических частей ПНУ.
В таких случаях возникала проблема, заключающаяся в том, что ПНУ могло некорректно определять направление с помощью геомагнитного датчика и экран с картой, соответствующей текущему местонахождению, мог отражаться некорректно.
Представляется необходимым предложить мобильный телефон, имеющий навигационное устройство, которое может улучшить точность определения направления с помощью геомагнитного датчика, способ инициализации корректирующих значений и функцию навигации.
Сущность изобретения
В навигационном устройстве и способе инициализации корректирующих значений, которые соответствуют варианту осуществления настоящего изобретения, заранее заданный блок проведения измерений измеряет текущее местоположение, геомагнитный датчик, расположенный на заранее заданном основном блоке, определяет геомагнетизм, направление основного блока вычисляется с помощью заранее заданного блока вычисления направления, после установки корректирующих значений, предназначенных для корректировки определенных заранее значений геомагнетизма, что делается на основе определенных значений и корректирующих значений, результаты измерений, полученные с помощью блока проведения измерений, и результаты вычисления местонахождения показываются пользователю с помощью заранее заданного блока показа информации, заранее заданный блок переключения рабочего состояния переключает между обычным рабочим состоянием, в котором выполняется указанный процесс показа, и состоянием ожидания, в котором поддерживается часть состояния процессов и останавливается, по меньшей мере, процесс вычисления направления; и в случае перехода из состояния ожидания в обычное рабочее состояние корректирующие значения проходят инициализацию с помощью заранее заданного блока осуществления инициализации.
Таким образом, даже если периферийное магнитное поле и намагниченность периферийных частей или подобных элементов изменились во время нахождения в состоянии ожидания, навигационное устройство и способ инициализации корректирующих значений, соответствующий приведенной выше структуре, могут выработать надлежащие корректирующие значения, соответствующие магнитному полю и намагниченности после изменения, что делается путем повторного получения корректирующих значений с самого начала.
Также сотовый телефон с навигационными возможностями, соответствующий варианту осуществления настоящего изобретения, содержит блок проведения измерений, предназначенный для измерения текущего местоположения; геомагнитный датчик, расположенный в заранее заданном основном блоке и предназначенный для определения геомагнетизма; блок вычисления направления, предназначенный для вычисления направления основного блока, после установки корректирующих значений, нужных для корректировки определенных значений геомагнетизма на основе определенных значений и корректирующих значений; блок показа информации, предназначенный для показа пользователю результатов измерений, полученных блоком проведения измерений, и результатов вычисления направления; блок переключения рабочего состояния, предназначенный для переключения между обычным рабочим состоянием, в котором выполняется указанный процесс показа, и состоянием ожидания, в котором поддерживается часть состояния процессов и останавливается, по меньшей мере, процесс вычисления направления; блок процесса инициализации, предназначенный для инициализации корректирующих значений в случае перехода из состояния ожидания в обычное рабочее состояние с помощью блока переключения рабочего состояния; и блок сотового телефона, предназначенный для осуществления обработки телефонного звонка путем осуществления беспроводной связи с заранее заданной базовой станцией.
Таким образом, даже если периферийное магнитное поле и намагниченность периферийных частей или подобных элементов изменились во время нахождения в состоянии ожидания, сотовый телефон с навигационными возможностями, соответствующий приведенной выше структуре, может выработать надлежащие корректирующие значения, соответствующие магнитному полю и намагниченности после изменения, что делается путем повторного получения корректирующих значений с самого начала.
Согласно приведенным выше структурам, даже если периферийное магнитное поле и намагниченность периферийных частей или подобных элементов изменились во время нахождения в состоянии ожидания, могут быть выработаны надлежащие корректирующие значения, соответствующие магнитному полю и намагниченности после изменения, что делается путем повторного получения корректирующих значений с самого начала. Следовательно, могут быть реализованы навигационное устройство, способ инициализации корректирующих значений и сотовый телефон с навигационными возможностями, в которых с помощью геомагнитного датчика может быть увеличена точность определения направления.
Краткое описание чертежей
Фиг.1 - схематический вид, иллюстрирующий общую структуру ПНУ;
фиг.2 - схематический вид, иллюстрирующий определение системы координат ПНУ;
фиг.3 - схематический вид, иллюстрирующий структуру датчика ПНУ;
фиг.4А и 4В - схематические виды, иллюстрирующие состояние во время движения по неровной дорожной поверхности;
фиг.5 - схематический вид, иллюстрирующий состояние во время движения по кривой;
фиг.6 - схематический вид, иллюстрирующий способ вычисления текущего местоположения с использованием скорости и угла;
фиг.7 - схематический вид, иллюстрирующий схему ПНУ;
фиг.8 - схематический вид, иллюстрирующий структуру блока вычисления скорости;
фиг.9 - схематический вид, иллюстрирующий состояние, вызванное колебанием опоры;
фиг.10 - схематический вид, иллюстрирующий отношение между максимальным значением и минимальным значением;
фиг.11 - вид, показывающий блок-схему, сопровождающую описание процедур процесса вычисления текущего местоположения, в котором используется процесс вычисления скорости;
фиг.12 - вид, показывающий блок-схему, сопровождающую описание процедур процесса инициализации;
фиг.13 - схематический вид, иллюстрирующий общую структуру мобильного телефона;
фиг.14 - схематический вид, иллюстрирующий схему мобильного телефона;
фиг.15 - схематический вид, иллюстрирующий пример использования, соответствующий другому варианту осуществления изобретения.
Описание предпочтительных вариантов осуществления изобретения
Варианты осуществления изобретения, реализующие изобретение (в дальнейшем называемые просто «вариантами осуществления изобретения») будут описаны со ссылками на фигуры. Описание приведено в следующем порядке.
1. Первый вариант осуществления изобретения (ПНУ)
2. Второй вариант осуществления изобретения (мобильный телефон)
3. Другие варианты осуществления изобретения
1. Первый вариант осуществления изобретения
1-1. Структура ПНУ
Как показано на фиг.1, портативное навигационное устройство (в дальнейшем также называемое ПНУ 1 (Персональное Навигационное Устройство)) содержит блок 2 отображения, расположенный на передней стороне устройства. ПНУ 1 выполнено таким образом, чтобы на основании данных карты, хранящихся во внутренней энергонезависимой памяти (не показана), отображать экран с картой или подобное, например, в блоке 2 отображения, в результате чего содержимое показывается пользователю.
Также ПНУ 1 держится на опоре 3, которая прикреплена к панели приборов описанного ниже автомобиля 9 с помощью присоски 3А, кроме того, ПНУ 1 и опора 3 соединены механически и электрически.
Таким образом, ПНУ работает с помощью электроэнергии, полученной от аккумулятора автомобиля 9 через опору 3, а когда ПНУ 1 снято с опоры 3, оно работает в независимом режиме с помощью электроэнергии, получаемой от встроенного аккумулятора.
ПНУ расположено таким образом, чтобы блок 2 отображения был размещен примерно вертикально по отношению к направлению движения автомобиля 9. Система координат ПНУ 1 в этом случае отображается следующим образом: направление вперед/назад (направление движения) для автомобиля 9 является осью X, горизонтальное направление, которое перпендикулярно оси X, является осью Y, а вертикальное направление является осью Z.
В этой системе координат, направление движения автомобиля 9 является положительным по оси X, направление направо является положительным по оси Y и направление вниз является положительным по оси Z.
Как показано на фиг.3, ПНУ 1 содержит внутренний трехмерный датчик 4 ускорения, гиродатчик 5 оси Y, гиродатчик 6 оси Z, датчик 7 атмосферного давления и геомагнитный датчик 8.
Трехмерный датчик 4 ускорения выполнен таким образом, чтобы измерять как значения напряжения следующие величины: ускорение αx в направлении оси X, ускорение αy в направлении оси Y и ускорение αz в направлении оси Z соответственно.
Также гиродатчик 5 оси Y, гиродатчик 6 оси Z и датчик 7 атмосферного давления выполнены таким образом, чтобы измерять как значения напряжения следующие величины: угловую скорость ωy по оси Y, угловую скорость ωz по оси Z и периферийное давление PR соответственно.
Далее, геомагнитный датчик 8 выполнен таким образом, чтобы измерять как значения напряжения, следующие величины: геомагнетизм Mx, My и Mz соответственно по направлению оси X, по направлению оси Y и по направлению оси Z.
1-2. Принципы вычисления
ПНУ 1, соответствующее варианту осуществления настоящего изобретения, может также выполнять автономный процесс нахождения местоположения с целью вычисления текущего местоположения после вычисления скорости автомобиля 9, что делается на основе ускорения и угловой скорости и других величин, измеренных трехмерным датчиком 4 ускорения, гиродатчиком 5 оси Y и другими устройствами. Далее будут описаны основные принципы вычисления скорости и текущего местоположения.
1-2-1. Принципы вычисления скорости
На практике, автомобиль 9, являющийся движущимся объектом, редко перемещается по гладкой дороге, которая представляет собой дорожную поверхность, в реальности автомобиль 9 перемещается по дороге, которая, в общем, является вогнутой, как показано на фиг.4А, и которая, в общем, является выпуклой, как показано на фиг.4В.
Когда автомобиль 9 перемещается по дороге вогнутой формы (фиг.4А), ПНУ 1, установленное на панели приборов автомобиля 9, определяет ускорение αz в направлении вниз по оси Z, что делается с помощью трехмерного датчика 4 ускорения (фиг.3), при этом частота проведения измерений равна, например, 50 Гц.
Также ПНУ 1 определяет угловую скорость ωy по оси Y, которая перпендикулярна направлению движения, что делается с помощью гиродатчика 5 (фиг.3) оси Y, при этом частота проведения измерений равна, например, 50 Гц.
ПНУ 1 считает положительным ускорение αz, направленное вниз вдоль оси Z, и также считает положительной угловую скорость ωy, в случае вращения вверх в вертикальном направлении по отношению к направлению движения в виртуальной окружности, образованной вдоль вогнутой дорожной поверхности, как показано на фиг.4А.
ПНУ 1 использует ускорение αz, определенное трехмерным датчиком 4 ускорения, и угловую скорость ωy, определенную гиродатчиком 5 оси Y, для вычисления 50 раз за секунду скорости V в направлении движения с помощью следующего выражения (1):

Также, когда автомобиль 9 движется по дороге выпуклой формы (фиг.4В), ПНУ 1 определяет ускорение  в направлении вверх по оси Z, что делается с помощью трехмерного датчика 4 ускорения, при этом частота проведения измерений равна, например, 50 Гц. Также ПНУ 1 определяет угловую скорость
в направлении вверх по оси Z, что делается с помощью трехмерного датчика 4 ускорения, при этом частота проведения измерений равна, например, 50 Гц. Также ПНУ 1 определяет угловую скорость  по оси Y, что делается с помощью гиродатчика 5 оси Y, при этом частота проведения измерений равна, например, 50 Гц.
по оси Y, что делается с помощью гиродатчика 5 оси Y, при этом частота проведения измерений равна, например, 50 Гц.
ПНУ 1 использует ускорение  , определенное трехмерным датчиком 4 ускорения, и угловую скорость , определенную гиродатчиком 5 оси Y, для вычисления 50 раз за секунду скорости V' в направлении движения с помощью следующего выражения (2):
, определенное трехмерным датчиком 4 ускорения, и угловую скорость , определенную гиродатчиком 5 оси Y, для вычисления 50 раз за секунду скорости V' в направлении движения с помощью следующего выражения (2):

Для упрощения описания отрицательное значение ускорения αz будет описываться как ускорение , но фактически трехмерный датчик ускорения определяет ускорение как противоположное по знаку значение ускорения αz. Аналогично для угловой скорости противоположное по знаку значение угловой скорости ωy будет описываться как угловая скорость , но фактически гиродатчик 5 оси Y определяет угловую скорость как противоположное по знаку значение угловой скорости ωy. Соответственно скорость V' также фактически вычисляется как скорость V.
1-2-2. Принципы вычисления текущего местоположения
Далее будут описаны принципы вычисления текущего местоположения, предназначенные для вычисления текущего местоположения на основе скорости V, найденной в соответствии с описанными выше принципами вычисления скорости, и на основе угловой скорости относительно оси Z.
Как показано на фиг.5, угловая скорость (скорость рыскания) ωz относительно оси Z во время поворота автомобиля 9, например, в направлении против часовой стрелки определяется гиродатчиком 6 (фиг.3) оси Z, при этом частота проведения измерений равна, например, 50 Гц.
Далее ПНУ 1 получает величину изменения от предыдущего местоположения Р0 до текущего местоположения Р1 исходя из скорости V в предыдущем местоположении Р0 и угла θ, полученного умножением угловой скорости ωz, определенной гиродатчиком, на частоту проведения измерений (в данном случае на 0,02 секунды). Затем ПНУ 1 может вычислить и получить текущее местоположение Р1 путем прибавления величины изменения к предыдущему местоположению Р0.
1-3. Схема ПНУ
Как показано на фиг.7, ПНУ 1 выполнено на основе блока 11 управления и блока 10 навигации, который снабжен датчиками различных типов и выполняет функции навигации.
Блок 11 управления содержит ЦП (центральный процессор) и осуществляет централизованное управление всем устройством на основе основной программы, считанной из блока 12 хранения информации, который выполнен, например, на основе энергонезависимой памяти.
Также ПНУ 1 выполняет описанный ниже процесс вычисления текущего местоположения, процесс инициализации и подобные процессы, соответствующие прикладным программам различных типов, считанных блоком 11 управления из блока 12 хранения информации.
Далее ПНУ 1 содержит функциональный блок 13, представляющий собой сенсорную панель, объединенную с блоком 2 отображения, непоказанный выключатель и так далее. При получении рабочей инструкции от пользователя через сенсорную панель или выключатель, функциональный блок 13 сообщает о содержании работы блоку 11 управления.
Блок 11 управления выполнен таким образом, чтобы осуществлять обработку в соответствии с содержанием работы пользователя, например устанавливает пункт назначения и так далее в соответствии с содержанием работы, полученным от функционального блока 13.
Также блок 11 управления выполнен таким образом, чтобы работать как блок 16 переключения рабочего состояния. То есть в случае когда работает выключатель функционального блока 13, блок 16 переключения рабочего состояния переключается между включенным состоянием, в котором работает все ПНУ 1, и выключенным состоянием, в котором работа всего ПНУ 1 полностью останавливается, и состоянием ожидания.
В случае переключения от включенного состояния в состояние ожидания, блок 11 управления останавливает работу различных датчиков и блока 2 отображения и подобных устройств, продолжает выполняться только часть функций блока 11 управления и сохраняются данные различных типов и подобное, имевшиеся на момент, непосредственно предшествующий переключению.
Также в случае переключения из состояния ожидания во включенное состояние, блок 11 управления моментально восстанавливает рабочее состояние до состояния, которое было в момент, непосредственно предшествующий переключению в состояние ожидания, это делается исходя из сохраненных данных различного типа и подобного, и ПНУ 1 начинает работать.
В этом случае блок 16 переключения рабочего состояния может возвратиться из состояния ожидания во включенное состояние, если включен двигатель автомобиля 9, а также к ПНУ 1, прикрепленному к опоре 3, поступает электроэнергия.
Далее ПНУ 1 выполнено таким образом, чтобы переключаться между следующими режимами работы: режим установки на автомобиле, в котором осуществляется процесс навигации в состоянии, когда ПНУ 1 установлено на автомобиле 9 с помощью опоры 3 (фиг.1), и режим ходьбы, в котором осуществляется процесс навигации в состоянии, когда ПНУ 1 снято с опоры 3 и удерживается пользователем, который в основном передвигается пешком.
Также блок 11 управления работает в качестве блока 17 определения опоры. Блок 17 определения опоры периодически (например, каждые 3 секунды) определяет, присутствует ли электрическое соединение ПНУ 1 с опорой 3 или не присутствует, и вырабатывает сигнал CTD определения опоры, который содержит полученные результаты, и подает этот сигнал в блок 16 переключения рабочего состояния.
На основе сигнала CTD определения опоры блок 16 переключения рабочего состояния переключает режим работы общего блока 11 управления в режим установки на автомобиле в случае присутствия соединения с опорой 3 и переключает в режим ходьбы в случае отсутствия соединения с опорой 3.
Например, в случае когда блок 17 определения опоры определяет, что ПНУ 1 прикреплено к опоре 3, то показывающий это сигнал CTD определения опоры подается в блок 16 переключения рабочего состояния.
Соответственно, блок 16 переключения рабочего состояния переключает режим работы ПНУ 1 в режим установки на автомобиле. В случае режима установки на автомобиле, блок 11 управления выполняет функции блока 21 обработки GPS сигнала, блока 22 вычисления скорости, блока 23 вычисления угла, блока 24 вычисления высоты, блока 25 вычисления местоположения и блока 26 навигации.
В случае возможности приема GPS сигнала от GPS спутника, блок 11 управления в режиме установки на автомобиле может осуществлять обработку GPS сигналов, предназначенную для проведения измерений на основе GPS сигнала.
То есть ПНУ 1 передает множество GPS сигналов, полученных от GPS спутника с помощью антенны ANT1, в блок 21 обработки GPS сигнала, являющийся частью блока 11 управления.
Блок 21 обработки GPS сигнала получает данные NPD 1 о текущем местоположении путем точного измерения текущего местоположения автомобиля 9 исходя из данных об экваторе, полученных после демодуляции множества GPS сигналов, и расстояния от множества GPS спутников до автомобиля 9 и передает указанные данные в блок 26 навигации.
Блок 26 навигации получает сигнал MD режима работы, который содержит результат переключения режима работы, от блока 16 переключения рабочего состояния и осуществляет процесс навигации в соответствии с режимом работы в текущий момент времени.
В случае режима установки на автомобиле, когда блок 26 навигации считывает данные о карте окружающей местности, которые включают в себя текущее местоположение автомобиля 9, что делается на основе данных NPD 1 о текущем местоположении, и вырабатывает изображение карты, которое содержит текущее местоположение, после чего это изображение выдается в блок 2 отображения, изображение карты показывается пользователю.
Также ПНУ 1 не осуществляет обработку GPS сигнала при отсутствии приема GPS сигнала от GPS спутников. Таким образом, когда нет приема GPS сигнала, ПНУ 1 может осуществлять автономный процесс нахождения местоположения, направленный на вычисление текущего местоположения после вычисления скорости V на основе ускорения и угловой скорости и других данных, измеренных трехмерным датчиком 4 ускорения, гиродатчиком 5 оси Y и другими датчиками.
То есть трехмерный датчик 4 ускорения определяет ускорения αx, αy и αz при частоте проведения измерений, равной, например, 50 Гц, и данные AD об ускорении, содержащие ускорение αz, передаются в блок 22 вычисления скорости, который является частью блока 11 управления.
Гиродатчик 5 оси Y определяет угловую скорость ωy при частоте проведения измерений, равной, например, 50 Гц, и данные PD об угловой скорости, содержащие угловую скорость ωy, передает в блок 22 вычисления скорости, который является частью блока 11 управления.
Блок 22 вычисления скорости вычисляет скорость V 50 раз в секунду с использованием выражения (1) исходя из ускорения αz, соответствующего данным AD об ускорениях, поступившим от трехмерного датчика 4 ускорения, и исходя из угловой скорости ωy, соответствующей данным PD об угловой скорости, поступившим от гиродатчика 5 оси Y, и передает данные VC о скорости, содержащие скорость V, в блок 25 вычисления местоположения.
Также гиродатчик 6 оси Z определяет угловую скорость ωz при частоте проведения измерений, равной, например, 50 Гц, и данные YD об угловой скорости, содержащие угловую скорость ωz, передает в блок 23 вычисления угла, который является частью блока 11 управления.
Блок 23 вычисления угла умножает частоту проведения измерений (в этом случае равную 0,02 секунды) на угловую скорость ωz, которая соответствует данным YD об угловой скорости, поступившим от гиродатчика 6 оси Z, тем самым вычисляет угол θ в момент поворота автомобиля 9 в направлении по часовой стрелке или против часовой стрелки и передает данные DD об угле, содержащие угол θ, в блок 25 вычисления местоположения.
Блок 25 вычисления местоположения находит величину изменения от предыдущего местоположения Р0, показанного на фиг.6, до текущего местоположения Р1, что делается на основе угла θ, соответствующего данным DD об угле, полученным от блока 23 вычисления угла, и на основе скорости V, соответствующей данным VD о скорости, полученным от блока 22 вычисления скорости. Далее блок 25 вычисления местоположения вычисляет текущее местоположение Р1 путем прибавления величины изменения к предыдущему местоположению Р0 и передает данные NPD 2 о текущем местоположении, содержащие текущее местоположение Р1, в блок 26 навигации.
С другой стороны, датчик 7 атмосферного давления определяет давление PR окружающего воздуха с частотой проведения измерений, равной, например, 50 Гц, и передает данные PRD о давлении, содержащие давление PR, в блок 24 вычисления высоты.
Блок 24 вычисления высоты вычисляет высоту, на которой находится автомобиль 9, исходя из давления PR воздуха, соответствующего данным PRD о давлении, полученным от датчика 7 атмосферного давления, и предает данные HD о высоте, содержащие высоту, в блок 26 навигации.
Блок 26 навигации считывает из блока 12 хранения информации данные о карте окружающей местности, которые включают в себя текущее местоположение автомобиля 9 и которые основаны на данных NPD 2 о текущем местоположении, поступивших от блока 25 вычисления местоположения, и основаны на данных HD о высоте, поступивших от блока 24 вычисления высоты, и вырабатывает изображение карты, содержащее текущее местоположение автомобиля, после чего блок 26 навигации выдает это изображение в блок 2 отображения, тем самым изображение карты показывается пользователю.
1-4. Процесс вычисления скорости
Далее будет описан процесс вычисления скорости, направленный на вычисление скорости V в блоке 22 вычисления скорости на основе ускорения αz, которое соответствует данным AD об ускорении, поступившим от трехмерного датчика 4 ускорения, и на основе угловой скорости ωy, которая соответствует данным PD об угловой скорости, поступившим от гиродатчика 5 оси Y.
При осуществлении процесса вычисления скорости, блок 22 вычисления скорости выполняет функции блока 31 получения данных, блока 32 фильтрации высоких частот, блока 33 фильтрации низких частот, блока 34 вычисления скорости, блока 35 сглаживания и устранения шумов и блока 36 вывода скорости, как показано на фиг.8.
Блок 31 получения данных, являющийся частью блока 22 вычисления скорости, получает данные AD об ускорении от трехмерного датчика 4 ускорения и данные PD об угловой скорости от гиродатчика 5 оси Y и передает данные AD об ускорении и данные PD об угловой скорости в блок 32 фильтрации высоких частот.
Блок 32 фильтрации высоких частот отрезает постоянные составляющие данных AD об ускорении и данных PD об угловой скорости, поступивших от блока 31 получения данных, и передает полученные в результате данные AD1 об ускорении и данные PD1 об угловой скорости в блок 33 фильтрации низких частот.
Блок 33 фильтрации низких частот осуществляет описанный ниже процесс фильтрации низких частот для данных AD1 об ускорении и данных PD1 об угловой скорости, поступивших от блока 32 фильтрации высоких частот, и передает полученные в результате данные AD2 об ускорении и данные PD2 об угловой скорости в блок 34 вычисления скорости.
Блок 34 вычисления скорости осуществляет описанный ниже процесс вычисления скорости для данных AD2 об ускорении и данных PD2 об угловой скорости, поступивших от блока 33 фильтрации низких частот, и передает полученные в результате данные VD1 о скорости в блок 35 сглаживания и устранения шумов.
Блок 35 сглаживания и устранения шумов осуществляет заранее заданный процесс сглаживания и устранения шумов для данных V1 о скорости, поступивших от блока 34 вычисления скорости, уменьшает различие в ошибке, содержащейся в скорости V, и передает полученные в результате данные VD о скорости в блок 36 вывода скорости.
Блок 36 вывода скорости передает данные VD о скорости, поступившие от блока 35 сглаживания и устранения шумов, в блок 25 вычисления местоположения.
Таким образом, блок 22 вычисления скорости вычисляет скорость V автомобиля 9 на основе данных AD об ускорении, поступивших от трехмерного датчика 4 ускорения, и данных PD об угловой скорости, поступивших от гиродатчика 5 оси Y.
1-4-1. Процесс фильтрации низких частот
Далее будет описан процесс фильтрации низких частот, осуществляемый блоком 33 фильтрации низких частот для данных AD1 об ускорении и данных PD1 об угловой скорости, поступивших от блока 32 фильтрации высоких частот.
Как описано выше, когда ПНУ 1 установлено на автомобиле 9, угловую скорость ωy, образующуюся вследствие изгибания дороги в направлении движения автомобиля 9, определяет гиродатчик 5 оси Y.
Хотя подробности опущены, результат эксперимента показывает, что для ПНУ 1 в текущий момент времени угловая скорость ωy определяется как вибрация частоты от 1 до 2 Гц независимо от скорости движения автомобиля 9.
ПНУ 1 установлено на опоре 3, которая прикреплена к панели приборов автомобиля 9 с помощью присоски 3А. Как показано на фиг.9 опора 3 содержит основной блок 3В опоры, который расположен выше присоски 3А, один конец которого поддерживается точкой 3С приложения нагрузки, расположенной на определенной высоте в основном блоке 3В опоры, а блок 3D поддержки ПНУ предназначен для поддержки ПНУ 1 с другого конца.
Следовательно, в случае колебаний автомобиля 9 вместе с изгибами дороги, ПНУ 1 колеблется с ускорением αc и угловой скоростью ωc, например, в вертикальном направлении, при этом центром колебаний является точка 3С приложения нагрузки блока 3D поддержки ПНУ.
В результате экспериментов и подобных действий, с помощью гиродатчика 5 оси Y было подтверждено, что ПНУ 1 имеет угловую скорость ωy, которая колеблется от 1 до 2 Гц вместе с изгибами дороги, как описано выше, и общую угловую скорость ωcy, которая соединяется с угловой скоростью ωс, принимающей колебания от опоры, составляющие примерно 15 Гц.
Также было подтверждено, что ПНУ 1 имеет, с помощью трехмерного датчика 4 ускорения, ускорение αz, которое колеблется с частотой от 1 до 2 Гц вместе с изгибами дороги, как описано выше, и общее ускорение αcz, которое соединяется с ускорением αс, которое принимает колебания от опоры 3, составляющие примерно 15 Гц.
Таким образом, блок 33 фильтрации низких частот осуществляет фильтрацию низких частот для данных AD1 об ускорении и данных PD1 об угловой скорости, поступивших от блока 32 фильтрации высоких частот, и удаляет частотные компоненты частоты 15 Гц, то есть ускорение αс и угловую скорость ωс, которые вызваны тем, что ПНУ 1 поддерживается опорой 3.
То есть благодаря удалению ускорения αс из общего ускорения αcz блок 33 фильтрации низких частот может извлечь ускорение αz, которое определяется изгибами дороги. Также благодаря удалению угловой скорости ωс из общей угловой скорости ωcz блок 33 фильтрации низких частот может извлечь угловую скорость ωy, которая определяется изгибами дороги.
1-4-2. Процесс вычисления скорости
Далее будет описан процесс вычисления скорости, предназначенный для вычисления скорости V и осуществляемый блоком 34 вычисления скорости на основе данных AD2 об ускорении и данных PD2 об угловой скорости, поступивших от блока 33 фильтрации низких частот.
В общем, ПНУ 1 может быть расположено в разных местах автомобиля 9, например на панели приборов, расположенной в передней части автомобиля 9, или рядом с задним ветровым стеклом, которое находится в задней части автомобиля 9.
Хотя подробности опущены, результаты экспериментов показывают, что для ПНУ 1 фаза ускорения αz, определенного с помощью ПНУ 1, которое установлено в задней части автомобиля 9, отстает от ускорения αz, определенного с помощью ПНУ 1, которое установлено в передней части. Таким образом, ПНУ 1 использует данные в определенном диапазоне данных PD2 об угловой скорости.
Далее, в случае когда скорость V автомобиля 9 мала, ускорение αz и угловая скорость ωy изменяются быстро из-за небольших изменений дорожной поверхности. Таким образом, блок 34 вычисления скорости устанавливает диапазон используемых данных как 25 опорных точек, то есть устанавливает узкий диапазон для обработки внезапных изменений ускорения и угловой скорости.
Также в случае когда скорость V автомобиля 9 большая, велико влияние подвески автомобиля 9 и ускорение αz и угловая скорость ωy изменяются медленно. Таким образом, для обработки медленных изменений ускорения и угловой скорости блок 34 вычисления скорости устанавливает диапазон используемых данных как 75 опорных точек, то есть устанавливает широкий диапазон.
В частности, блок 34 вычисления скорости извлекает максимальное и минимальное значения из диапазона из 25 опорных точек или из 75 опорных точек, отцентрированных опорной точкой Pm, соответствующей предыдущему положению (фиг.6) ускорения αz, которое соответствует данным AD2 об ускорении, поступившим от блока 33 фильтрации низких частот, и считает указанные максимальное и минимальное значения максимальным ускорением αz,max и минимальным ускорением αz,min соответственно.
Также блок 34 вычисления скорости извлекает максимальное и минимальное значения из диапазона из 25 опорных точек или из 75 опорных точек, отцентрированных измерительной точкой Pm угловой скорости ωy, которые соответствуют данным PD2 об угловой скорости, поступившим от блока 33 фильтрации низких частот, и считает указанные максимальное и минимальное значения максимальной угловой скоростью ωz,max и минимальной угловой скоростью ωz,min соответственно.
То есть блок 34 вычисления скорости извлекает из диапазона, который шире сдвига фазы, который может иметь место для ускорения αz и угловой скорости ωy, максимальное ускорение αz,max и минимальное ускорение αz,min и максимальную угловую скорость ωy,max и минимальную угловую скорость ωy,min соответственно.
Блок 34 вычисления скорости использует максимальное ускорение αz,max и минимальное ускорение αz,min, извлеченные из данных AD2 об ускорении, и максимальную угловую скорость ωy,max и минимальную угловую скорость ωy,min, извлеченные из данных PD2 об угловой скорости, для вычисления скорости V в направлении движения в предыдущем местоположении Р0 (фиг.3) с помощью выражения (3), которое является модификацией приведенного выше выражения (1)

Затем блок 34 вычисления скорости передает данные VD1 о скорости, содержащие скорость V, в блок 35 сглаживания и устранения шумов.
То есть даже в случае возникновения сдвига фаз для ускорения αz и угловой скорости ωy с помощью выражения (3) блок 34 вычисления скорости может вычислить скорость V с устранением влияния сдвига фаз.
Таким образом, блок 34 вычисления скорости может отражать состояние дорожной поверхности и автомобиля 9 в соответствии со значением скорости V путем переключения между диапазонами данных в зависимости от скорости V автомобиля 9 в случае извлечения максимального ускорения αz,max и минимального ускорения αz,min и максимальной угловой скорости ωy,max и минимальной угловой скорости ωy,min, тем самым увеличивается точность вычисления скорости V.
1-4-3. Процедуры процесса вычисления местоположения с использованием процесса вычисления скорости
Далее будут описаны со ссылкой на блок-схему с фиг.11 процедуры процесса вычисления местоположения для блока 11 управления ПНУ 1, предназначенные для вычисления текущего местоположения с использованием процесса вычисления скорости, такого как описанный выше процесс вычисления скорости.
На практике блок 1 управления начинает работу с начального этапа последовательности RT1 и переходит к этапу SP1 и получает данные AD об ускорении, определенные трехмерным датчиком 4 ускорения, и данные PD об угловой скорости, определенные гиродатчиком 5 оси Y, с помощью блока 31 получения данных, являющегося частью блока 22 вычисления скорости, и далее переходит на следующий этап SP2.
На этапе SP2 блок 11 управления с помощью блока 32 фильтрации высоких частот, являющегося частью блока 22 вычисления скорости, осуществляет фильтрацию высоких частот для данных AD об ускорении и данных PD об угловой скорости и переходит на следующий этап SP3.
На этапе SP3 блок 11 управления с помощью блока 33 фильтрации низких частот, являющегося частью блока 22 вычисления скорости, осуществляет фильтрацию низких частот, при этом используется фильтр четвертого порядка с бесконечной импульсной характеристикой и частотой среза, равной, например, 1 Гц, для данных AD1 об ускорении и данных PD1 об угловой скорости, которые прошли фильтрацию высоких частот, и переходит на следующий этап SP4.
На этапе SP4 блок 11 управления вычисляет скорость V с помощью блока 34 вычисления скорости, являющегося частью блока 22 вычисления скорости, с использованием выражения (3) на основе ускорения αz, которое соответствует данным AD2 об ускорении, и на основе угловой скорости ωy, которая соответствует данным PD2 об угловой скорости, прошедшим процесс фильтрации низких частот, и переходит на следующий этап SP5.
На этапе SP5 блок 11 управления осуществляет процесс сглаживания и устранения шумов для данных VD о скорости, которые содержат скорость V, вычисленную на этапе SP4.
В частности, блок 11 управления осуществляет процесс фильтрации низких частот, который вызван переменной частотой среза для данных VD1 о скорости, которые содержат скорость V, вычисленную на этапе SP4, и переходит к следующему этапу SP6.
На этапе SP6 блок 23 вычисления угла, являющийся частью блока 11 управления, получает данные YD об угловой скорости, полученные гиродатчиком 6 оси, и переходит к следующему этапу SP7.
На этапе SP7 блок 23 вычисления угла, являющийся частью блока 11 управления, умножает угловую скорость ωz, которая соответствует данным YD об угловой скорости, на 0,02 секунды, которые представляют собой частоту проведения измерений, тем самым вычисляет данные DD об угле, содержащие угол θ, и переходит к следующему этапу SP8.
На этапе SP8 блок 11 управления вычисляет данные NPD2 о текущем местоположении на основе данных VD о скорости, прошедших на этапе SP5 процесс сглаживания и устранения шумов, и данных DD об угле, вычисленных этапе SP8, и переходит к следующему этапу SP9.
На этапе SP9 блок 11 управления считывает данные о карте окружающей местности, которая содержит текущее местоположение автомобиля 9, на основе данных NPD2 о текущем местоположении, поступивших от блока 25 вычисления местоположения, и вырабатывает изображение карты, которая содержит текущее местоположение автомобиля. Далее блок 11 управления выдает полученное изображение карты в блок 2 отображения и переходит к следующему этапу SP10 и заканчивает набор процессов.
1-5. Определение направления
1-5-1. Процесс определения направления
Далее, в случае когда блок 17 определения опоры, являющийся частью блока 11 управления (фиг.7), определяет, что ПНУ 1 снято с опоры 3, сигнал CTD определения опоры подается в блок 16 переключения рабочего состояния.
Соответственно, блок 16 переключения рабочего состояния переключает режим работы ПНУ 1 в режим ходьбы. В случае ходьбы блок 11 управления выполняет функции блока 27 определения угла пространственного положения и блока 28 вычисления направления, помимо блока 21 обработки GPS сигнала и блока 26 навигации, которые аналогичны блокам из режима установки на автомобиле.
Блок 27 определения угла пространственного положения сначала получает данные AD3 о трехмерном ускорении, содержащие ускорения αx, αy и αz, от трехмерного датчика 4 ускорения. Далее блок 27 определения угла пространственного положения осуществляет заранее заданный процесс определения угла пространственного положения на основе полученных данных AD3 о трехмерном ускорении, тем самым вырабатывает данные AAD об угле пространственного положения, которые содержат угол пространственного положения, и блок 27 определения угла пространственного положения подает указанные данные в блок 28 вычисления направления.
Блок 28 вычисления направления получает данные TMD о геомагнетизме, содержащие магнетизм Mx, My и Mz, от геомагнитного датчика 8 и осуществляет заранее заданный процесс корректировки (подробности описаны ниже).
Далее блок 28 вычисления направления осуществляет заранее заданный процесс вычисления направления на основе данных AAD об угле пространственного положения, полученных из скорректированных данных TMD о геомагнетизме и из блока 27 определения угла пространственного положения, тем самым вырабатывает данные CD о направлении, которые содержат направление ПНУ 1, и выдает указанные данные в блок 26 навигации.
То есть ПНУ 1 функционирует как так называемый электронный компас с геомагнитным датчиком 8, трехмерным датчиком 4 ускорения, блоком 27 определения угла пространственного положения и блоком 28 вычисления направления и вырабатывает данные CD о направлении.
Блок 26 навигации считывает данные о карте окружающей местности, которая содержит текущее местоположение, на основе данных NPD 1 о текущем местоположении и вырабатывает изображение карты, которое содержит текущее местоположение и которое соответствует текущему направлению ПНУ 1, на основе данных CD о направлении, после чего указанное изображение выдает в блок 2 отображения, тем самым пользователю показывают изображение карты.
Далее, в случае присутствия рядом металлического объекта или магнитного предмета, геомагнитный датчик 8 естественным образом некорректно определяет геомагнетизм. Следовательно, в случае когда ПНУ 1 расположено внутри автомобиля 9, который является большим металлическим объектом, блок 28 вычисления направления не может выработать данные CD о направлении, содержащие корректное направление.
Таким образом, в случае когда ПНУ 1 прикреплено к опоре 3, блок 28 определения направления определяет то, что ПНУ 1 находится внутри автомобиля 9 и не вырабатывает данные CD о направлении.
В частности, в случае когда определено, что ПНУ 1 прикреплено к опоре 3, блок 16 переключения рабочего состояния останавливает работу геомагнитного датчика 8, блока 27 определения угла пространственного положения и блока 28 вычисления направления, уменьшая потребление электроэнергии.
1-5-2. Процесс корректировки данных геомагнетизма с помощью корректирующих значений
Далее по естественным причинам на геомагнитный датчик 8 влияют присутствующие рядом магнитные предметы, такие как металл и подобные вещества, и влияет намагниченность металлических частей, таких как защитная пластина (не показана) ПНУ 1, при этом данные TMD о геомагнетизме содержат ошибки.
Таким образом, при начале получения данных TMD о геомагнетизме, которые содержат магнетизм Mx, My и Mz, от геомагнитного датчика 8 блок 28 вычисления направления, являющийся частью блока 11 управления, устанавливает корректирующие значения, предназначенные для корректировки данных TMD о геомагнетизме, пороговые значения, показывающие обычные диапазоны значений или подобное (далее называем их обучающими значениями LN).
Тогда в случае осуществления процесса инициализации, блок 28 вычисления направления показывает, например, в блоке 2 отображения сообщение, подобное следующему «перемещая основной блок, нарисуйте им цифру 8», чтобы пользователь переместил все ПНУ 1, изображая цифру «8», и вырабатывает обучающие значения LN с использованием полученных в это время данных TMD о геомагнетизме.
Затем блок 28 вычисления направления подвергает данные TMD о геомагнетизме заранее заданному процессу корректировки с использованием корректирующих значений из обучающих значений LN, тем самым корректируя данные TMD о геомагнетизме, и вырабатывает описанные выше данные CD о направлении на основе скорректированных данных TMD о геомагнетизме.
Также существуют случаи, когда намагниченность металлических частей и подобных элементов, расположенных в ПНУ 1, изменяется тогда, когда пользователь, удерживающий ПНУ 1, проходит мимо места с особенно сильным магнитным полем. Было замечено, что такое изменение намагниченности влияет на данные TMD о геомагнетизме.
Таким образом, блок 28 вычисления направления определяет, находятся ли данные TMD о геомагнетизме, полученные от геомагнитного датчика 8, в обычном диапазоне или нет, и если данные TMD о геомагнетизме находятся в обычном диапазоне, то вырабатывает данные CD о направлении с использованием данных TMD о геомагнетизме.
С другой стороны, в случае когда данные TMD о геомагнетизме, полученные от геомагнитного датчика 8, не находятся в обычном диапазоне, то блок 28 вычисления направления модифицирует корректирующие значения и пороговые значения и подобные величины из обучающих значений LN, что делается на основе данных TMD о геомагнетизме.
В этом случае, блок 28 вычисления направления сохраняет данные TMD о геомагнетизме за фиксированный период времени в прошлом (например, 30 секунд) в блоке 12 хранения информации. В случае модификации обучающих значений LN, блок 28 вычисления направления использует прошлые данные TMD о геомагнетизме, сохраненные в блоке 12 хранения информации.
Также каждый раз при увеличении количества модификаций обучающих значений LN, считается, что увеличивается точность процесса корректировки корректирующих значений в данных TMD о геомагнетизме, при этом корректирующие значения принадлежат обучающим значениям LN. То есть обучающие значения LN могут увеличить точность корректировки данных TMD о геомагнетизме, в соответствии со степенью модификации.
Следовательно, что касается обучающих значений LN, в случае когда количество модификаций велико и точность велика, то есть в случае, когда высока степень обучения, и если корректирующие значения или пороговые значения модифицированы значительно, то эта ситуация может привести к уменьшению точности.
Таким образом, блок 28 вычисления направления управляет степенью модификации обучающих значений LN, то есть степенью обучения, которая является уровнем LL обучения, и ограничивает диапазон модификаций обучающих значений LN в соответствии с уровнем LL обучения.
1-5-3. Процесс корректировки данных геомагнетизма при возвращении из состояния ожидания
Далее, как описано выше, в соответствии с действиями пользователя ПНУ 1 может быть переведено в состояние ожидания, в котором останавливается работа различных датчиков и подобных устройств. Например, когда пользователь использует ПНУ 1 в режиме ходьбы, он может перевести ПНУ 1 в режим ожидания из-за остановки в расположенном рядом магазине или подобном случае.
Даже в случае перемещения ПНУ 1 в состоянии ожидания, металлические части и подобные устройства, расположенные в ПНУ 1, испытывают влияние со стороны расположенных рядом магнитных полей и металлических предметов или подобных предметов и их намагниченность может измениться.
С другой стороны, даже в состоянии ожидания блок 11 управления, являющийся частью ПНУ 1, выполняет часть функций и также сохраняет обучающие значения LN и уровни LL обучения.
Следовательно, в случае когда ПНУ 1 возвращается во включенное состояние из состояния ожидания, сохраненные данные различных типов используются без изменений и немедленно начинается выполнение процессов различных типов, например процесса навигации.
Тем не менее, для ПНУ 1 периферийное магнитное поле может значительно отличаться в момент, непосредственно предшествующий переходу в состояние ожидания, и в момент, непосредственно следующий за возвратом во включенное состояние из состояния ожидания.
Также, даже если периферийное магнитное поле в момент, непосредственно предшествующий переходу в состояние ожидания, совпадает с периферийным магнитным полем в момент, непосредственно следующий за возвратом во включенное состояние из состояния ожидания, намагниченность металлических частей или подобных элементов ПНУ 1 может значительно измениться за время пребывания в состоянии ожидания.
В этом случае, геомагнитный датчик 8 вырабатывает данные TMD о геомагнетизме, на которые оказали влияние изменения в периферийном магнитном поле и изменения намагниченности металлических частей или подобных элементов ПНУ 1.
В это время, если блок 28 вычисления направления, являющийся частью блока 11 управления, корректирует данные TMD о геомагнетизме с использованием корректирующих значений из обучающих значений LN, которые хранятся с момента, предшествующего переходу в состояние ожидания, то корректировка будет выполнена неправильно, так как точность выработанных данных CD о направлении будет значительно снижена.
В случае когда степень изменения намагниченности металлических частей и подобных элементов ПНУ 1 сравнительно мала, то на данные TMD о геомагнетизме влияет изменение намагниченности и данные TMD о геомагнетизме становятся значением, содержащим ошибку, но, с другой стороны, указанное значение находится в обычном диапазоне. Следовательно, блок 28 вычисления направления может быть не способен определить только из диапазона полученных данных TMD о геомагнетизме, что обучающие значения LN надо модифицировать.
Далее, в случае сравнительно высокого уровня LL обучения, даже если обучающие значения LN модифицированы, блок 28 вычисления направления ограничен при модификации диапазонов корректирующих значений и подобных величин, что происходит из-за высоты уровней LL обучения, и блок 28 вычисления направления может быть не способен надлежащим образом выполнить модификацию.
Таким образом, при возвращении из состояния ожидания во включенное состояние, независимо от предыдущего уровня LL обучения, блок 28 вычисления направления, служащий как блок процесса инициализации, осуществляет процесс инициализации с целью возвращения обучающего значения LN и уровня LL обучения к начальным значениям.
Другими словами, при возвращении из состояния ожидания во включенное состояние, аналогично тому, когда выключенное состояние переводится во включенное состояние, блок 28 вычисления направления повторно получает обучающие значения LN из состояния отсутствия значений и уровни LL обучения также начинаются с самого малого уровня.
Таким образом, даже в случае изменения периферийного магнитного поля до перехода в состояние ожидания и после возвращения из состояния ожидания или в случае изменения намагниченности металлических частей или подобных элементов ПНУ 1, которое находится в состоянии ожидания, блок 28 вычисления направления может устранить влияние этих изменений и выработать надлежащие обучающие значения LN и может надлежащим образом скорректировать данные TMD о геомагнетизме.
Также в качестве части процесса инициализации блок 28 вычисления направления может удалить прошлые данные TMD о геомагнетизме, хранящиеся в блоке 12 хранения информации.
1-5-4. Процедуры процесса инициализации
Далее со ссылками на блок-схему с фиг.12 будут описаны процедуры процесса инициализации для блока 11 управления ПНУ 1, направленные на осуществление процесса инициализации.
На практике блок 11 управления начинает с начального этапа последовательности RT2 и переходит к этапу SP21. На этапе SP21 блок 11 управления переводит все ПНУ 1 во включенное состояние с помощью блока 16 переключения рабочего состояния, и блок 2 отображения и подобные блоки начинают работать, и далее блок 11 управления сбрасывает флаг завершения инициализации, который показывает, выполнена или нет инициализация обучающих значений LN и уровней LL обучения, и далее блок 11 управления продолжает работу на следующем этапе SP22.
На этапе SP22 блок 11 управления определяет, прикреплено или нет ПНУ 1 к опоре 3. Если получен отрицательный ответ, то это означает, что ПНУ 1 перемещено из автомобиля 9 и ПНУ 1 может вырабатывать данные CD о направлении, и блок 11 управления продолжает работу на следующем этапе SP23.
На этапе SP23 блок 11 управления определяет, завершен или нет процесс инициализации, что делается исходя из флага завершения инициализации. Если получен отрицательный ответ, то это означает, что процесс инициализации еще не осуществлен, и блок 11 управления продолжает работу на следующем этапе SP24.
На этапе SP24 блок 11 управления с помощью блока 16 переключения рабочего состояния запускает работу геомагнитного датчика 8, блока 27 определения угла пространственного положения и блока 28 вычисления направления и с помощью блока 28 вычисления направления также осуществляет процесс инициализации обучающих значений LN и уровней LL обучения. Далее при выставлении флага завершения инициализации, блок 11 управления продолжает работу на следующем этапе SP25.
То есть в случае когда состояние переключено от состояния ожидания во включенное состояние и процесс инициализации не осуществлен, на этапе SP24 блок 11 управления выполняет процесс инициализации обучающих значений LN и уровней LL обучения.
С другой стороны, если на этапе SP23 получен положительный ответ, то это означает, что процесс инициализации не надо осуществлять, и блок 11 управления продолжает работу на следующем этапе SP25.
На этапе SP25 блок 11 управления переключается в режим ходьбы с помощью блока 16 переключения рабочего состояния, после чего вырабатывает изображение карты с помощью блока 26 навигации, что делается исходя из данных NPD 1 о текущем местоположении и данных CD о направлении и подобных данных, и осуществляется процесс навигации с целью отображения указанного изображения в блоке 2 отображения, и блок 11 управления продолжает работу на следующем этапе SP28.
С другой стороны, если на этапе SP22 получен положительный результат, то это означает, что ПНУ 1 находится внутри автомобиля 9, на основании чего не вырабатываются данные CD о направлении, показывающие корректное направление, и блок 11 управления продолжает работу на следующем этапе SP26.
На этапе SP26 блок 11 управления с помощью блока 16 переключения рабочего состояния останавливает работу геомагнитного датчика 8, блока 27 определения угла пространственного положения и блока 28 вычисления направления, сбрасывает флаг завершения инициализации и продолжает работу на следующем этапе SP27.
В случае когда уже остановлена работа геомагнитного датчика 8, блока 27 определения угла пространственного положения и блока 28 вычисления направления или в случае когда уже сброшен флаг завершения инициализации, блок 11 управления оставляет свое состояние без изменения.
На этапе SP27 блок 11 управления с помощью блока 16 переключения рабочего состояния переключается в режим установки на автомобиле, осуществляет процессы различных типов, такие как процесс отображения карты и подобные, с помощью процедур RT1 вычисления местоположения (фиг.11) и продолжает работу на следующем этапе SP28.
На этапе SP28 блок 11 управления определяет, осуществил ли пользователь операции перехода в состояние ожидания с помощью выключателя функционального блока 13. Если получен отрицательный результат, то это означает, что включенное состояние надо сохранить, и блок 11 управления снова возвращается на этап SP22 и продолжает процесс навигации в различных режимах работы.
С другой стороны, если на этапе SP28 получен положительный ответ, то это означает переход в состояние ожидания и блок 11 управления продолжает работу на следующем этапе SP29.
На этапе SP29 блок 11 управления с помощью блока 16 переключения рабочего состояния останавливает работу геомагнитного датчика 8, блока 27 определения угла пространственного положения и блока 28 вычисления направления, сбрасывает флаг завершения инициализации и продолжает работу на следующем этапе SP30.
На этапе SP30 блок 11 управления с помощью блока 16 переключения рабочего состояния останавливает часть функций датчиков различных типов, таких как трехмерный датчик 4 ускорения, и блока 11 управления, тем самым осуществляется переход в состояние ожидания и блок 11 управления продолжает работу на следующем этапе SP31.
На этапе SP31 блок 11 управления определяет, было или нет включено электропитание через выключатель функционального блока 13. Если получен отрицательный ответ, то блок 11 управления повторяет этап SP31 до осуществления операции включения, тем самым сохраняя состояние ожидания.
С другой стороны, если на этапе SP31 получен положительный результат, то это означает, что согласно действиям пользователя ПНУ 1 надо перевести из состояния ожидания во включенное состояние, и блок 11 управления снова возвращается на этап SP21 и повторяет набор процессов.
В случае когда пользователь с помощью выключателя функционального блока 13 осуществил операцию выключения, блок 11 управления переключает все ПНУ 1 в выключенное состояние с помощью блока 16 переключения рабочего состояния и заканчивает набор процедур RT2 процесса инициализации.
1-6. Операции и результаты
Для описанной выше структуры блок 11 управления осуществляет процесс корректировки и подобные процессы с использованием корректирующих значений из обучающих значений LN, что делается с помощью блока 28 вычисления направления на основе данных TMD о геомагнетизме, поступивших от геомагнитного датчика 8.
Также блок 28 вычисления направления управляет степенью обучения, являющейся уровнями LL обучения, для обучающих значений LN и ограничивает диапазон модификаций обучающих значений LN в соответствии с уровнем LL обучения.
В случае перехода из состояния ожидания во включенное состояние ПНУ 1 с помощью блока 16 переключения рабочего состояния запускает работу геомагнитного датчика 8, блока 27 определения угла пространственного положения и блока 28 вычисления направления и осуществляет процесс инициализации обучающих значений LN и уровней LL обучения с помощью блока 28 вычисления направления.
Таким образом, даже в случае когда периферийное магнитное поле значительно отличается по сравнению с моментом, непосредственно предшествующим переходу в состояние ожидания, или в случае изменения намагниченности металлических частей или подобных элементов ПНУ 1 за время нахождения в состоянии ожидания, ПНУ 1 может точно возвратить обучающее значение LN и уровень LL обучения к первому значению.
Следовательно, может быть выработано обучающее значение LN, которое не является надлежащим корректирующим значением, соответствующим состоянию текущего магнитного поля или намагниченности после изменения, и уровень LL обучения может быть также установлен надлежащим образом.
Также в случае перехода из состояния ожидания во включенное состояние, если ПНУ 1 не прикреплено к опоре 3, то процесс инициализации осуществляется обязательно. Следовательно, даже в случае когда малы изменения периферийного магнитного поля или намагниченности и по фактически полученным данным TMD о геомагнетизме трудно определить, присутствует ли ошибка, ПНУ 1 может выработать обучающие значения LN, состоящие из корректирующих значений, которые дают возможность осуществить корректировку ошибок.
Также ПНУ 1 не вырабатывает данные CD о направлении, показывающие корректное направление тогда, когда ПНУ 1 находится внутри автомобиля 9 и геомагнитный датчик 8 не работает. Следовательно, в случае когда ПНУ 1 прикреплено к опоре 3, то есть в случае когда ПНУ 1 установлено в автомобиле 9, даже при переходе из состояния ожидания во включенное состояние, процесс инициализации не осуществляется, тем самым в блоке 11 управления не выполняются бесполезные процессы.
Согласно описанной выше структуре, в случае когда блок 11 управления ПНУ 1 переходит из состояния ожидания во включенное состояние, процесс инициализации осуществляется с помощью блока 28 вычисления направления для обучающих значений LN, которые содержат корректирующие значения, предназначенные для корректировки данных TMD о геомагнетизме, полученных геомагнитным датчиком 8, и уровней LL обучения, которые ограничивают диапазон модификации. Таким образом, в случае когда периферийное магнитное поле значительно изменяется по сравнению с моментом, непосредственно предшествующим переходу в состояние ожидания, или в случае когда в период нахождения в состоянии ожидания изменяется намагниченность металлических частей или подобных элементов ПНУ 1, блок 28 вычисления направления может точно возвратить обучающие значения LN и уровень LL обучения к первым значениям и повторить получение указанных значений сначала.
2. Второй вариант осуществления изобретения
Сотовый телефон 101, соответствующий второму варианту осуществления изобретения, содержит блок 102 отображения, который выполнен в виде жидкокристаллического устройства и предназначен для различных типов отображений, микрофон 104, акустический элемент 105 и функциональный блок 106, выполненный в виде кнопки или подобного устройства, как показано на фиг.13.
Также аналогично ПНУ 1 из первого варианта осуществления изобретения сотовый телефон 101 выполнен с возможностью прикрепления к автомобилю 9 (фиг.4) с помощью опоры 103.
Как показано на фиг.14 для сотового телефона 101 центральный блок 109 управления управляет блоком 110 сотового телефона, выполняющим функцию сотового телефона, и блоком 10 навигации, который осуществляет процесс навигации, аналогично описанному выше первому варианту осуществления изобретения.
Блок 110 сотового телефона соединен с блоком 102 отображения и функциональным блоком 106, а также с блоком 108 хранения информации, который выполнен из полупроводниковой памяти или подобным образом и который используется для хранения данных различных типов. В этом случае, хотя это не показано на фиг.14, блок 102 отображения, функциональный блок 106 и блок 108 хранения информации соединены с блоком 10 навигации.
В случае выполнения функции ответа на телефонный звонок, сотовый телефон 101 использует блок 110 сотового телефона для реализации функций связи и функций связи по электронной почте. На практике, блок 110 сотового телефона 101 передает сигналы, принятые с помощью антенны ANT2 от непоказанной базовой станции, в блок 111 передачи/приема.
Блок 111 передачи/приема представляет собой блок передачи и блок приема и обменивается принятыми данными, при этом он демодулирует принятые сигналы или выполняет подобные процессы, в соответствии с заранее заданным способом, и передает полученные данные в декодер 112. Декодер 112 декодирует принятые данные под управлением блока 114 управления сотовым телефоном, выполненного в виде микрокомпьютера, тем самым восстанавливаются аудиоданные телефонного звонка другого лица, участвующего в разговоре, и выводит полученные данные на акустический элемент 105. Акустический элемент 105 выводит аудио телефонного звонка партнеров на основе аудиоданных телефонного звонка.
С другой стороны, блок 110 сотового телефона передает аудиосигналы, полученные от микрофона 104, в кодер 115. Кодер 115 цифровым образом преобразует аудиосигнал под управлением блока 114 управления сотовым телефоном и затем передает аудиоданные, полученные при кодировании заранее заданным способом, в блок 111 передачи/приема.
После демодуляции аудиоданных в соответствии с заранее заданным способом, блок 111 передачи/приема беспроводным образом передает данные на базовую станцию (не показана) с помощью антенны ANT2.
В это время блок 114 управления сотовым телефоном, являющийся частью блока 110 сотового телефона, показывает в блоке 102 отображения телефонный номер партнера, состояние приема и так далее, что делается в соответствии с рабочими командами функционального блока 106.
Также в случае приема электронного письма, блок 114 управления сотовым телефоном, являющийся частью блока 110 сотового телефона, выдает принятые данные от блока 111 передачи/приема в декодер 112, передает в блок 102 отображения данные электронного письма, восстановленные при декодировании принятых данных, показывает содержимое электронного письма в блоке 102 отображения и сохраняет указанные данные в блоке 108 хранения информации.
Далее, в случае передачи электронного письма, после кодирования данных электронного письма с помощью функционального блока 106 и кодера 115, блок 114 управления сотовым телефоном, являющийся частью блока 110 сотового телефона, беспроводным образом передает указанные данные с помощью блока 111 передачи/приема и антенны ANT2.
С другой стороны, в случае выполнения функции навигации общий блок 109 управления управляет блоком 10 навигации и выполняет процесс навигации в режиме установки на автомобиле или режиме ходьбы, в соответствии с состоянием крепления к опоре 103.
Общий блок 109 управления ограничивает подачу электроэнергии в блок 10 навигации и уменьшает потребление электроэнергии за исключением случая выполнения функции навигации.
Далее общий блок 109 управления сотового телефона 101 выполняет функцию многозадачности по переключению и выполнению многих процессов (задач).
Например, в случае получения телефонного звонка во время выполнения функции навигации в процессе навигации, общий блок 109 управления временно переключается к функции обработки телефонного звонка, и после окончания процесса обработки телефонного звонка функцией обработки телефонного звонка запускается снова процесс навигации.
В это время, когда временно выполняется функция обработки телефонного звонка, общий блок 109 управления переводит блок 10 навигации в состояние ожидания и уменьшает непроизводительное потребление электроэнергии.
Далее, в случае выполнения функции навигации в режиме ходьбы, сотовый телефон 101 с помощью геомагнитного датчика 8 (фиг.7) блока 10 навигации вырабатывает данные TMD о геомагнетизме и выдает их в блок 28 вычисления направления, что делается аналогично ПНУ 1 из первого варианта осуществления изобретения.
Блок 28 вычисления направления использует корректирующие значения из обучающих значений LN для корректировки данных TMD о геомагнетизме и вырабатывает данные CD о направлении исходя из данных TMD о геомагнетизме и данных AAD об угле пространственного положения.
Также аналогично первому варианту осуществления изобретения, блок 28 вычисления направления управляет степенью обучения, представляющей собой уровни LL обучения, обучающих значений LN, и ограничивает диапазон модификации обучающих значений LN в соответствии с уровнем LL обучения.
Далее сотовый телефон 101 с помощью функции многозадачности переводит блок 10 навигации в состояние ожидания и в дальнейшем, при возвращении, аналогично возвращению из состояния ожидания во включенное состояние в первом варианте осуществления изобретения, с помощью блока 28 вычисления направления выполняется процесс инициализации, направленный на возвращение обучающих значений LN и уровней LL обучения к первому значению.
Таким образом, аналогично первому варианту осуществления изобретения, даже если существует разница в периферийных магнитных полях при повторном запуске функции навигации или если имеются изменения намагниченности металлических частей или подобных элементов сотового телефона 101, произошедшие за время нахождения в состоянии ожидания, блок 10 навигации может устранить их влияние и выработать надлежащие обучающие значения LN и может надлежащим образом скорректировать данные TMD о геомагнетизме.
Для описанной выше структуры, в случае возвращения блока 10 навигации из состояния ожидания с помощью функции многозадачности, сотовый телефон 101 с помощью блока 16 переключения рабочего состояния запускает работу геомагнитного датчика 8, блока 27 определения угла пространственного положения и блока 28 вычисления направления и осуществляет процесс инициализации обучающих значений LN и уровней LL обучения с помощью блока 28 вычисления направления.
Таким образом, даже если периферийное магнитное поле значительно отличается по сравнению с моментом, непосредственно предшествующим переходу в состояние ожидания, или если имеются изменения намагниченности металлических частей или подобных элементов сотового телефона 101, произошедшие за время нахождения в состоянии ожидания, сотовый телефон 101 может точно возвратить обучающее значение LN и уровень LL обучения к первому значению.
Следовательно, сотовый телефон 101 может выработать обучающее значение LN, которое не является надлежащим корректирующим значением, подходящим для состояния текущего магнитного поля или намагниченности после изменения, и уровень LL обучения также может быть надлежащим образом установлен.
Также сотовый телефон 101 может иметь аналогичные достоинства, как и ПНУ 1, соответствующее первому варианту осуществления изобретения, также для других точек.
Согласно описанной выше структуре, в случае когда блок 10 навигации возвращается из состояния ожидания, сотовый телефон 101, соответствующий второму варианту осуществления изобретения, с помощью блока 28 вычисления направления осуществляет процесс инициализации обучающих значений LN, которые включают в себя корректирующие значения, предназначенные для корректировки данных TMD о геомагнетизме, полученных от геомагнитного датчика 8, и уровней LL обучения, которые ограничивают диапазон модификации обучающих значений LN. Таким образом, даже в случае когда периферийное магнитное поле значительно отличается по сравнению с моментом, непосредственно предшествующим переходу в состояние ожидания, или в случае когда имеются изменения намагниченности металлических частей или подобных элементов сотового телефона 101, произошедшие за время нахождения в состоянии ожидания, блок 28 вычисления направления может точно возвратить обучающие значения LN и уровень LL обучения к первым значениям и повторно получить указанные значения сначала.
3. Другие варианты осуществления изобретения
Заметим, что приведено описание, в котором, в соответствии с описанным выше первым вариантом осуществления изобретения, в случае когда ПНУ 1 возвращается из состояния ожидания во включенное состояние и когда ПНУ 1 прикреплено к опоре 3, процесс инициализации не осуществляется.
Тем не менее, настоящее изобретение не ограничено приведенной выше ситуацией и может быть предусмотрено, чтобы обязательно осуществлять процесс инициализации при возвращении ПНУ 1 из состояния ожидания во включенное состояние, например, без определения, прикреплено ли ПНУ 1 к опоре 3 или нет. В этом случае может быть предусмотрено, что процесс инициализации не осуществляется при получении от пользователя заранее заданной операции отмены в случае, когда, например, в блоке 2 отображения показано сообщение «перемещая основной блок, нарисуйте им цифру 8». То же самое относится ко второму варианту осуществления изобретения.
Также приведено описание, в котором, в соответствии с описанным выше первым вариантом осуществления изобретения, даже в случае когда запускается двигатель автомобиля 9 и начинается подача электроэнергии при креплении ПНУ 1 к опоре 3, ПНУ 1 возвращается из состояния ожидания во включенное состояние.
Тем не менее, настоящее изобретение не ограничено этой ситуацией и может быть предусмотрено, чтобы даже в случае когда запускается двигатель автомобиля 9 и начинается подача электроэнергии при креплении ПНУ 1 к опоре 3, ПНУ 1 оставался в состоянии ожидания. То же самое относится ко второму варианту осуществления изобретения.
Далее, в соответствии с описанным выше первым вариантом осуществления изобретения, приведено описание, в котором со степенью модификации обучающих значений LN, то есть степенью обучения, обращаются как с уровнями LL обучения и диапазон модификаций обучающих значений LN ограничен в соответствии с уровнем LL обучения.
Тем не менее, настоящее изобретение не ограничено этой ситуацией, и может быть предусмотрено, чтобы не было уровней LL обучения и можно было свободно модифицировать обучающие значения LN, или диапазон модификаций обучающих значений LN был ограничен в соответствии с другими возможными параметрами, или дополнительно обучающие значения LN могут быть модифицированы в зафиксированном диапазоне модификаций. То же самое относится ко второму варианту осуществления изобретения.
Далее в соответствии с описанным выше первым вариантом осуществления изобретения, приведено описание, в котором данные TMD о геомагнетизме за фиксированный период времени в прошлом (например, 30 секунд) хранятся в блоке 12 хранения информации и обучающие значения LN модифицируются с использованием прошлых данных TMD о геомагнетизме.
Тем не менее, настоящее изобретение не ограничено этой ситуацией, и может быть предусмотрено, чтобы данные TMD о геомагнетизме за оптимальный период времени в прошлом сохранялись в блоке 12 хранения информации и обучающие значения LN модифицировались с использованием прошлых данных TMD о геомагнетизме или самые новые данные TMD о геомагнетизме могли бы использоваться для модификации обучающих значений LN без сохранения прошлых данных TMD о геомагнетизме. Далее обучающие значения LN могли бы модифицироваться на основе других возможных параметров. То же самое относится ко второму варианту осуществления изобретения.
Далее в соответствии с описанным выше первым вариантом осуществления изобретения, приведено описание, в котором в процессе инициализации после перехода из состояния ожидания во включенное состояние, удаляются прошлые данные TMD о геомагнетизме, хранившиеся в блоке 12 хранения информации.
Тем не менее, настоящее изобретение не ограничено этой ситуацией, и может быть предусмотрено, чтобы, например, прошлые данные TMD о геомагнетизме, сохраненные в блоке 12 хранения информации непосредственно перед переходом в состояние ожидания, могли быть удалены. Также, например, часть прошлых данных TMD о геомагнетизме или все указанные данные остаются во время осуществления процесса инициализации, и прошлые данные TMD о геомагнетизме используются после взвешивания и уменьшения.
Далее в соответствии с описанным выше первым вариантом осуществления изобретения, описание приведено для случая, когда ПНУ 1 используется в состоянии, когда оно расположено так, что оно длиннее в направлении направо/налево. Тем не менее, настоящее изобретение не ограничено этой ситуацией, и может быть предусмотрено, чтобы ПНУ 1 использовалось в состоянии, когда оно длиннее в вертикальном направлении, как показано на фиг.15. В этом случае ПНУ 1 определяет угловую скорость ωz относительно оси Z с помощью гиродатчика 5 оси Y и определяет угловую скорость ωy относительно оси Y с помощью гиродатчика 6 оси Z. То же самое относится ко второму варианту осуществления изобретения.
Далее в соответствии с описанным выше первым вариантом осуществления изобретения, описание приведено для случая, когда трехмерный датчик 4 ускорения, гиродатчик 5 оси Y, гиродатчик 6 оси Z, датчик 7 давления воздуха и геомагнитный датчик 8 расположены внутри ПНУ 1. Тем не менее, настоящее изобретение не ограничено этой ситуацией, и может быть предусмотрено, чтобы трехмерный датчик 4 ускорения, гиродатчик 5 оси Y, гиродатчик 6 оси Z, датчик 7 давления воздуха и геомагнитный датчик 8 были расположены снаружи ПНУ 1. То же самое относится ко второму варианту осуществления изобретения.
Также ПНУ 1 может содержать регулировочный механизм, расположенный, например, на боковой поверхности ПНУ 1 и предназначенный для регулировки угла крепления трехмерного датчика 4 ускорения, гиродатчика 5 оси Y, гиродатчика 6 оси Z, датчика 7 давления воздуха и геомагнитного датчика 8.
Таким образом, даже в случае когда ПНУ 1 не установлено так, чтобы блок 2 отображения, являющийся частью ПНУ 1, был расположен примерно вертикально по отношению к направлению движения автомобиля 9, пользователь может отрегулировать регулировочный механизм, например, так, чтобы ось вращения гиродатчика 5 оси Y соответствовала вертикальному направлению автомобиля 9. То же самое относится ко второму варианту осуществления изобретения.
Далее в соответствии с описанным выше первым вариантом осуществления изобретения, описание приведено для случая, когда ПНУ 1 прикреплено к автомобилю 9, который является легковым автомобилем, но настоящее изобретение не ограничено этой ситуацией и ПНУ 1 может быть прикреплено к различным движущимся объектам, которые перемещаются вдоль различных поверхностей, например может быть прикреплено к мотоциклу, велосипеду или поезду. В этом случае, например, опора 3 может быть закреплена на руле или подобном элементе движущегося объекта с помощью заранее заданного крепления или подобного устройства.
Далее в соответствии с описанным выше вторым вариантом осуществления изобретения, описание приведено для случая, когда настоящее изобретение применено в блоке 10 навигации сотового телефона 101. Тем не менее, настоящее изобретение не ограничено этой областью применения, и, например, настоящее изобретение может быть применено в электронных устройствах различного типа, имеющих функцию навигации и функцию электронного компаса, таким как компьютерное устройство, или цифровая камера, или подобные устройства.
Далее в соответствии с описанным выше первым вариантом осуществления изобретения, приведено описание для случая, когда блок 11 управления ПНУ 1 осуществляет процедуры процесса инициализации для описанной выше последовательности RT2, что соответствует прикладной программе, сохраненной заранее в блоке 12 хранения информации. Тем не менее, настоящее изобретение не ограничено этой ситуацией, и блок 11 управления ПНУ 1 может осуществлять описанные выше процедуры процесса инициализации в соответствии с прикладными программами, установленными с носителя информации, прикладными программами, скачанными из Интернета, и прикладными программами, установленными с помощью других различных способов. То же самое относится ко второму варианту осуществления изобретения.
Далее в соответствии с описанным выше первым вариантом осуществления изобретения, описание приведено для случая, когда ПНУ 1 выполнено в виде навигационного устройства, содержащего блок 21 обработки GPS сигнала или блок 25 вычисления местоположения, служащий в качестве блока проведения измерений, геомагнитный датчик 8, служащий в качестве геомагнитного датчика, блок 28 вычисления направления, служащий в качестве блока вычисления направления, блок 2 отображения, служащий в качестве блока показа информации, блок 16 переключения рабочего состояния, служащий в качестве блока переключения рабочего состояния, и блок 28 вычисления направления, служащий в качестве блока осуществления инициализации.
Тем не менее, настоящее изобретение не ограничено этой ситуацией, и навигационное устройство может быть выполнено из блока проведения измерений, геомагнитного датчика, блока вычисления направления, блока показа информации, блока переключения рабочего состояния и блока осуществления инициализации, выполненных в соответствии с различными другими структурами.
Далее в соответствии с описанным выше вторым вариантом осуществления изобретения, описание приведено для случая, когда сотовый телефон 101, служащий в качестве сотового телефона с функцией навигации, содержит блок 21 обработки GPS сигнала или блок 25 вычисления местоположения, служащий в качестве блока проведения измерений, геомагнитный датчик 8, служащий в качестве геомагнитного датчика, блок 28 вычисления направления, служащий в качестве блока вычисления направления, блок 2 отображения, служащий в качестве блока показа информации, блок 16 переключения рабочего состояния, служащий в качестве блока переключения рабочего состояния, блок 28 вычисления направления, служащий в качестве блока осуществления инициализации, и блок 110 сотового телефона, служащий в качестве сотового телефона.
Тем не менее, настоящее изобретение не ограничено этой ситуацией, и сотовый телефон с функцией навигации может быть выполнен из блока проведения измерений, геомагнитного датчика, блока вычисления направления, блока показа информации, блока переключения рабочего состояния, блока осуществления инициализации и блока сотового телефона, выполненных в соответствии с различными другими структурами.
Настоящая заявка касается объекта, связанного с объектом, описанным в заявке на японский патент JP 2009-216081, которая зарегистрирована в патентном ведомстве Японии 17 сентября 2009 года и содержание которой полностью включено в настоящую заявку посредством ссылки.
Специалисты в рассматриваемом вопросе должны понимать, что возможны различные модификации, комбинации и изменения в зависимости от требований конструкции и других факторов, которые находятся в рамках новизны, определенной в прилагаемой формуле изобретения и ее эквивалентах.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАВИГАЦИОННОЕ УСТРОЙСТВО, СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ И МОБИЛЬНОЕ ОКОНЕЧНОЕ УСТРОЙСТВО | 2010 |
|
RU2526470C2 |
| Комплексный способ навигации летательных аппаратов | 2016 |
|
RU2646957C1 |
| Малогабаритный навигационный комплекс | 2016 |
|
RU2644632C1 |
| Адаптивный корректор углов ориентации для БИНС | 2020 |
|
RU2749152C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА | 2014 |
|
RU2555496C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2395061C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2443978C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2293950C1 |
| СПОСОБ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИИ | 2022 |
|
RU2806707C1 |
| НАВИГАЦИОННОЕ УСТРОЙСТВО С АДАПТИВНЫМИ ИНСТРУКЦИЯМИ ПО НАВИГАЦИИ | 2006 |
|
RU2413927C2 |
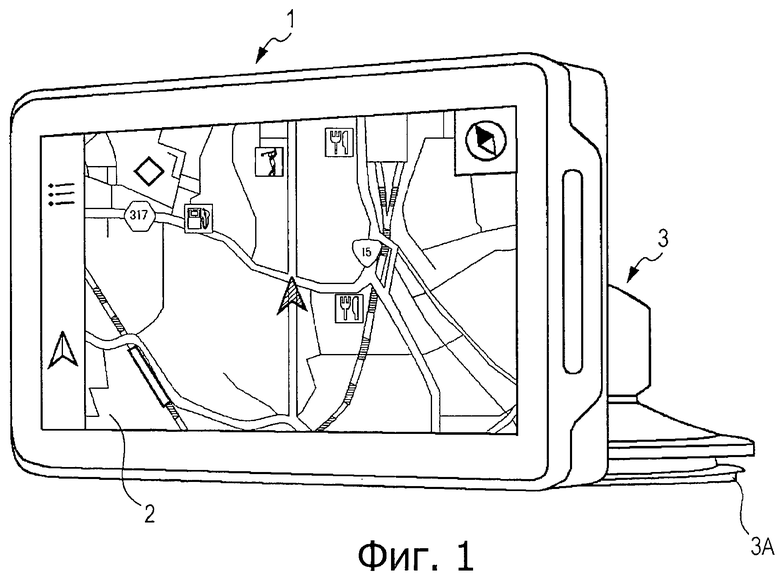
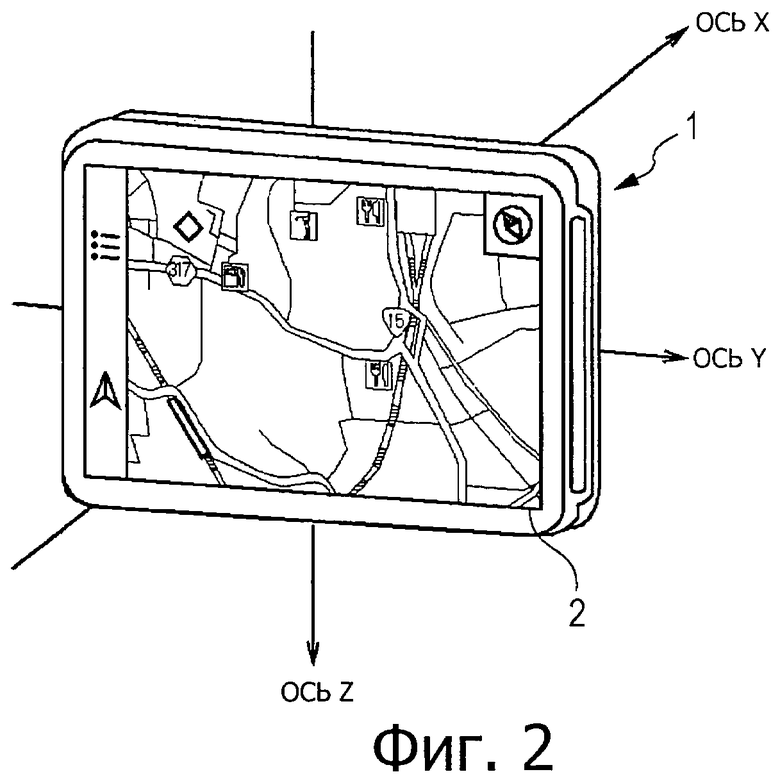
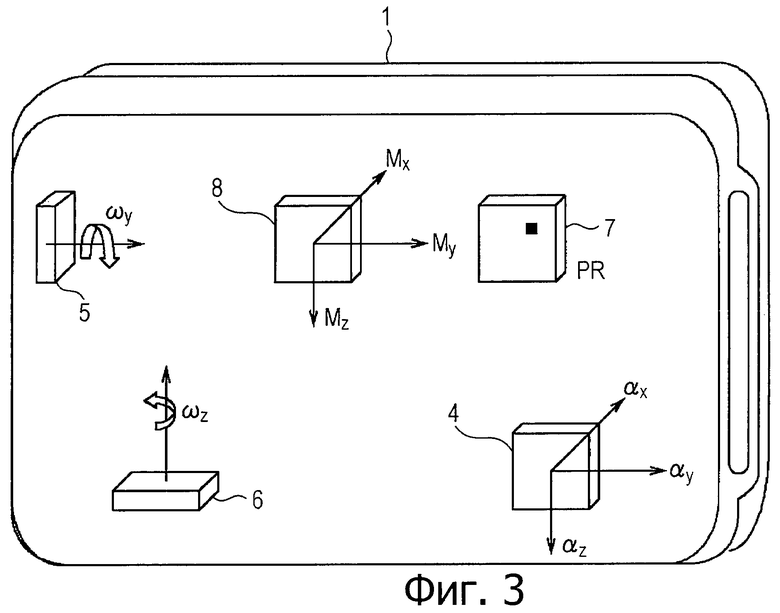
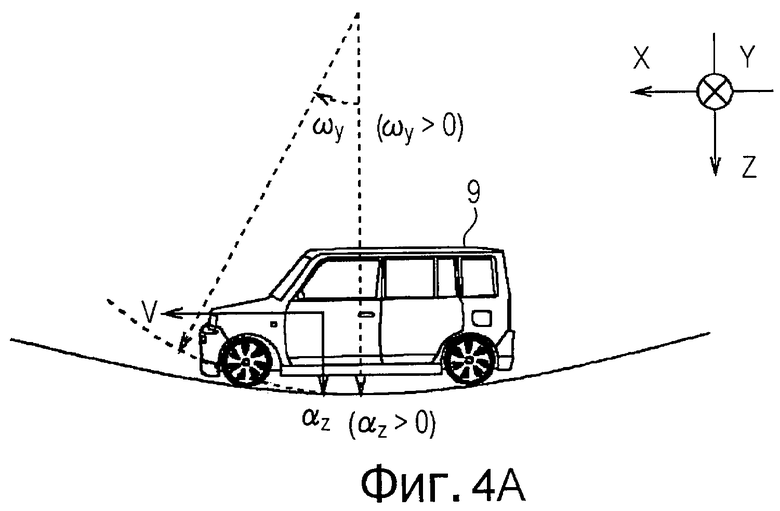

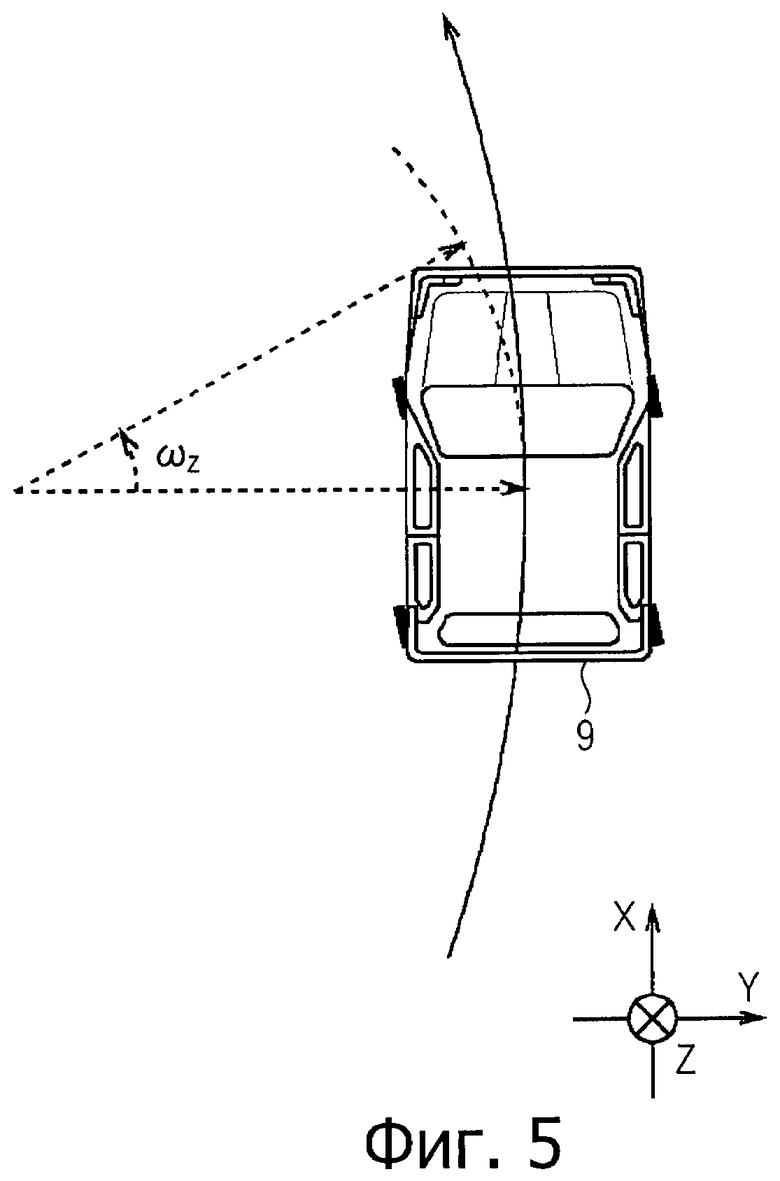
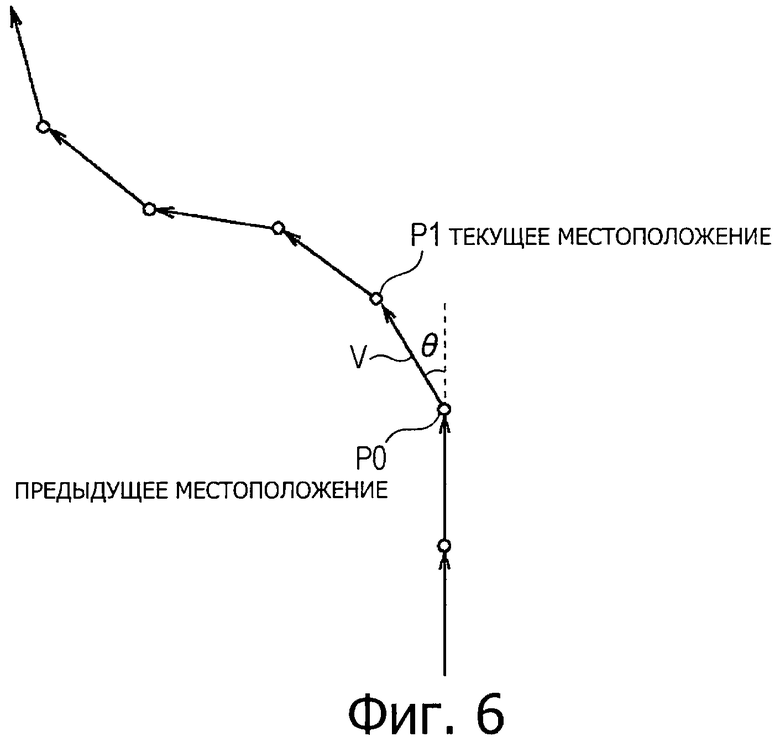
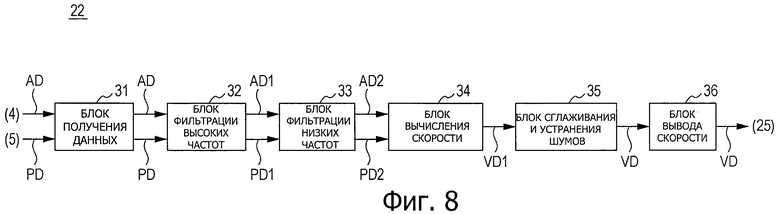
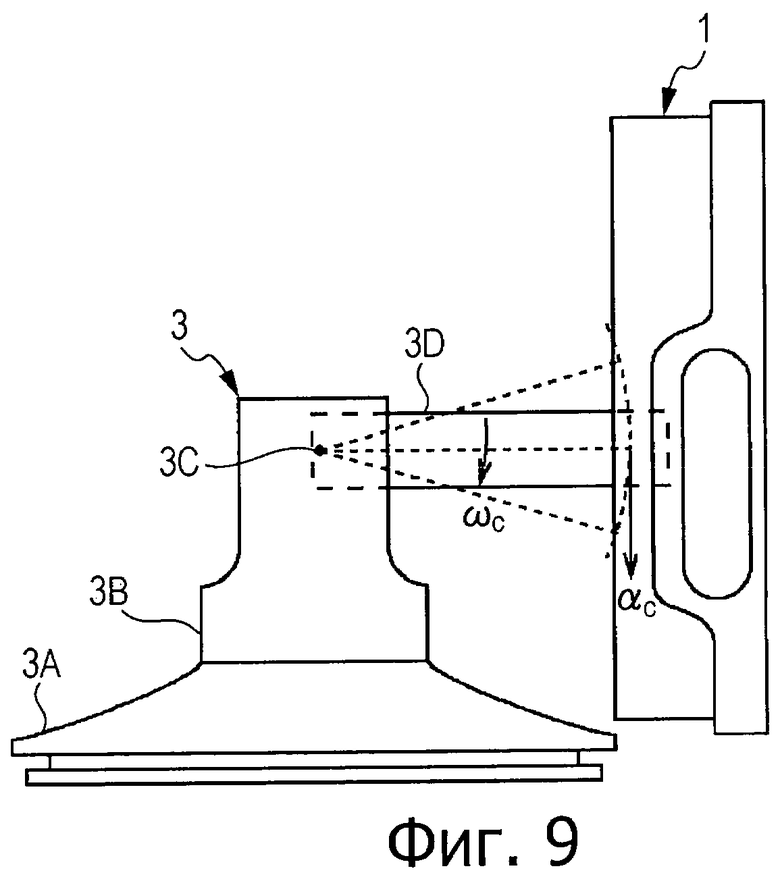
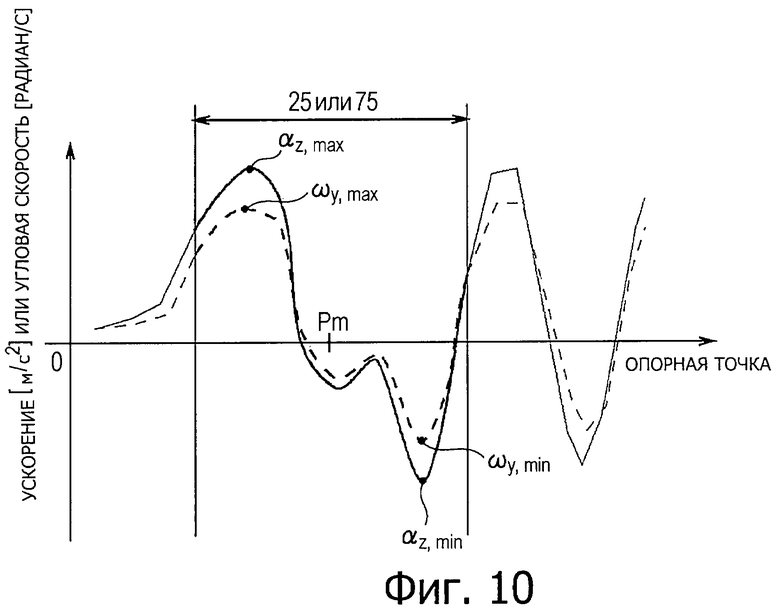
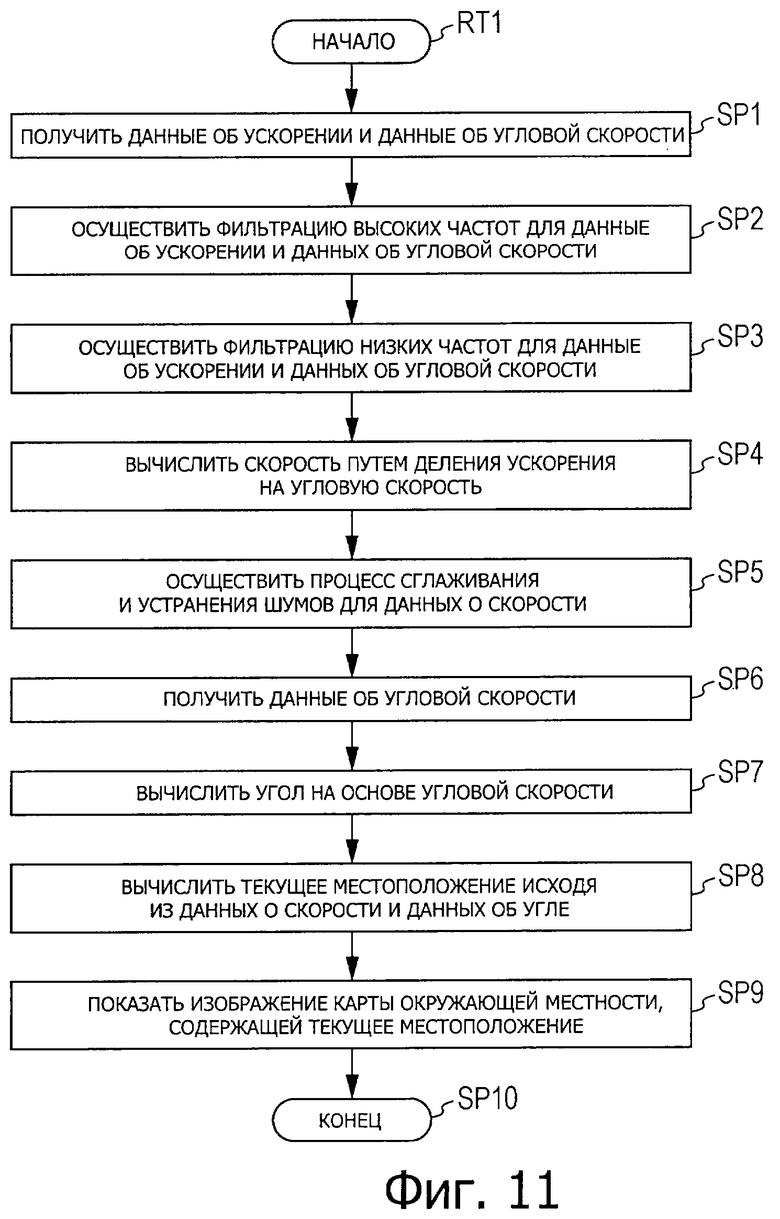
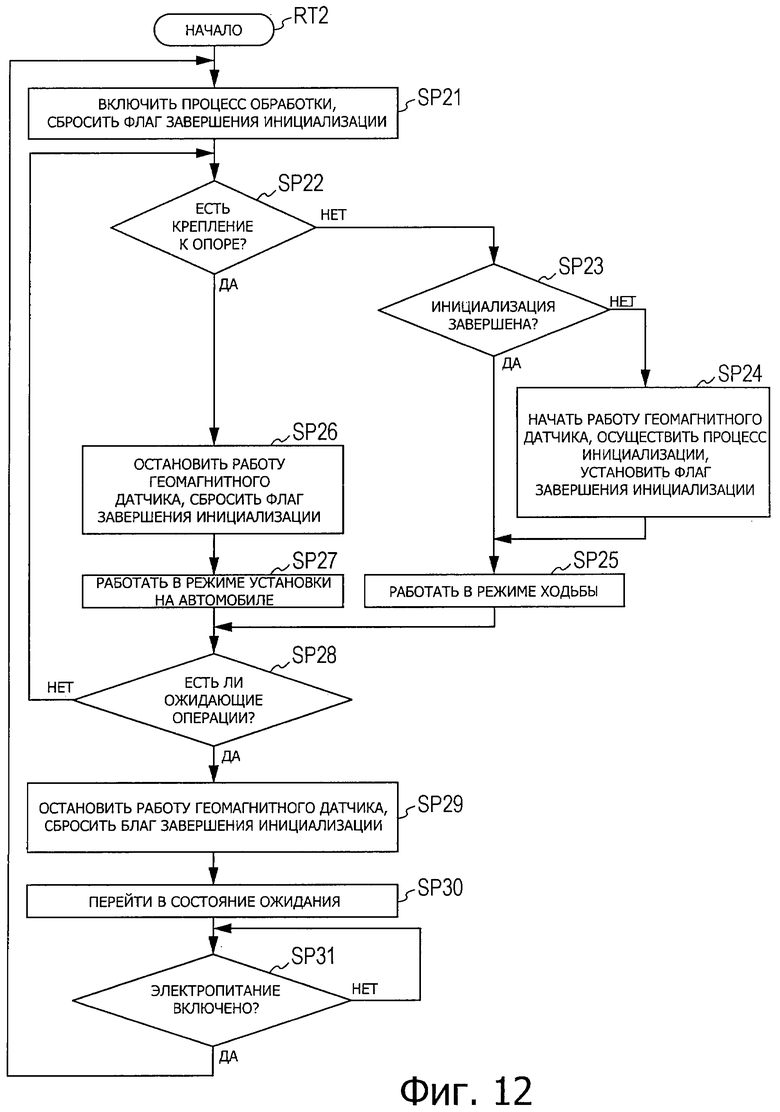
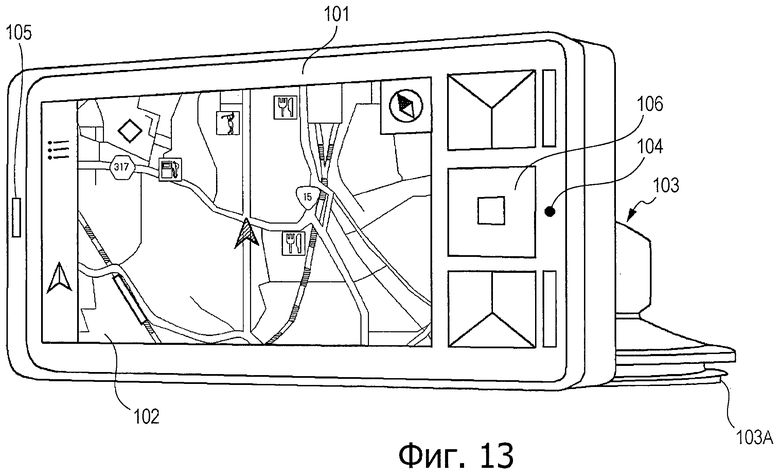

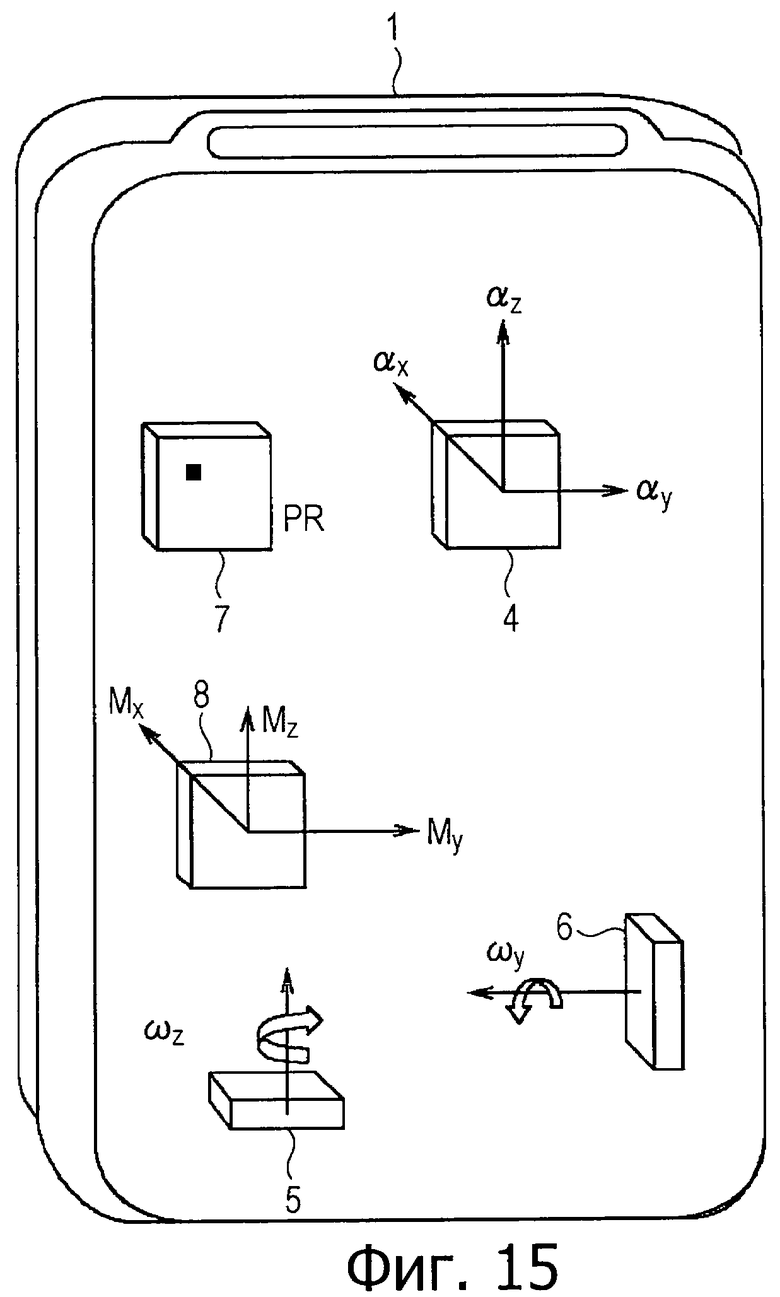
Изобретение относится к области навигационного приборостроения и может найти применение в системах персональной навигации. Технический результат - расширение функциональных возможностей. Для достижения данного результата навигационное устройство содержит: блок измерений, предназначенный для измерения текущего местоположения; геомагнитный датчик, расположенный на заранее заданном основном блоке и предназначенный для определения геомагнетизма; блок вычисления направления, предназначенный для вычисления направления основного блока после установки корректирующих значений, обеспечивающий корректировку значений геомагнетизма; блок индикации, предназначенный для показа пользователю результатов измерений и результатов вычисления местонахождения; блок установки рабочего состояния, предназначенный для переключения между обычным рабочим состоянием, в котором выполняется процесс показа, и состоянием ожидания, в котором сохраняется часть состояния процессов и фиксируется, по меньшей мере, процесс вычисления направления; блок процесса инициализации, предназначенный для инициализации корректирующих значений в случае перехода из состояния ожидания в обычное рабочее состояние, указанный переход осуществляется блоком установки/переключения рабочего состояния. 3 н. и 4 з.п. ф-лы, 15 ил.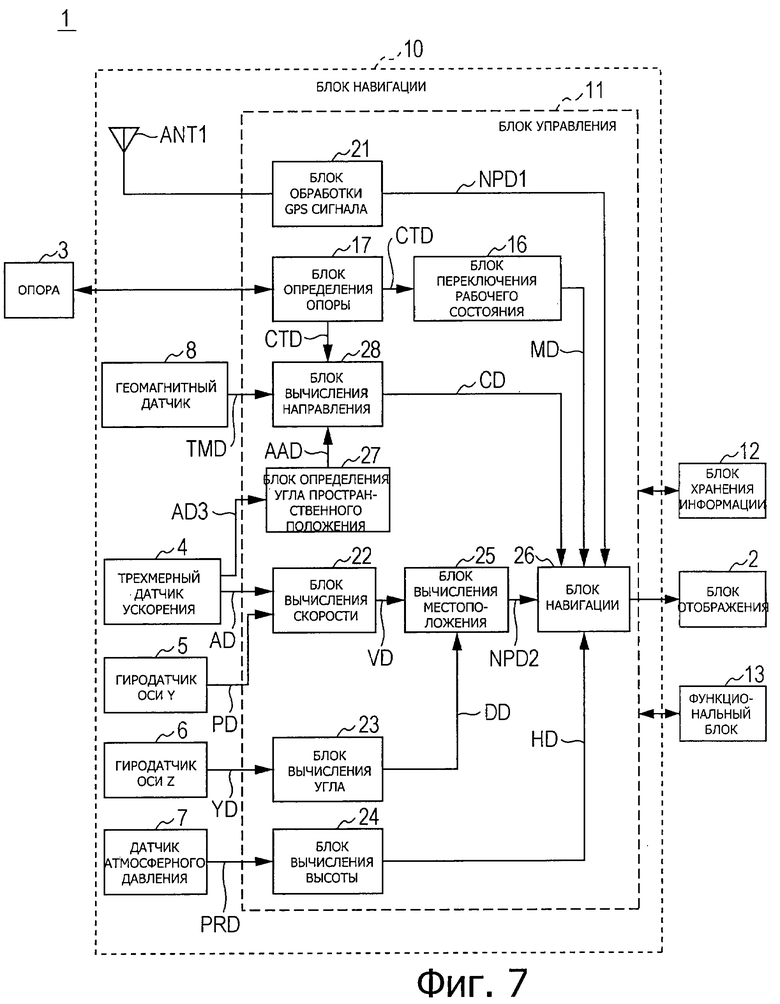
1. Навигационное устройство, содержащее:
блок проведения измерений, предназначенный для измерения текущего местоположения;
геомагнитный датчик, расположенный на заранее заданном основном блоке и предназначенный для определения геомагнетизма;
блок вычисления направления, предназначенный для вычисления направления основного блока после установки корректирующих значений, нужных для корректировки определенных значений геомагнетизма, что делается на основе указанных определенных значений и указанных корректирующих значений;
блок показа информации, предназначенный для показа пользователю результатов измерений, полученных от указанного блока проведения измерений, и результатов вычисления указанного местонахождения;
блок переключения рабочего состояния, предназначенный для переключения между обычным рабочим состоянием, в котором выполняется указанный процесс показа, и состоянием ожидания, в котором поддерживается часть состояния процессов и останавливается, по меньшей мере, процесс вычисления указанного направления; и
блок процесса инициализации, предназначенный для инициализации указанных корректирующих значений в случае перехода из указанного состояния ожидания в указанное обычное рабочее состояние, указанный переход осуществляется блоком переключения рабочего состояния.
2. Навигационное устройство по п.1, дополнительно содержащее:
блок определения прикрепленного состояния, предназначенный для определения, прикреплен или нет указанный основной блок к заранее заданной нижней части;
при этом блок процесса инициализации инициализирует указанные корректирующие значения в случае переключения из указанного состояния ожидания в указанное обычное рабочее состояние, осуществляемого блоком переключения рабочего состояния, и указанный основной блок не прикреплен к указанной нижней части.
3. Навигационное устройство по п.2,
в котором указанная нижняя часть прикреплена к заранее заданному движущемуся объекту и подает электроэнергию указанному основному блоку, при этом электроэнергия поставляется указанным движущимся объектом;
и в котором блок переключения рабочего состояния переключает в указанное обычное рабочее состояние при начале подачи электроэнергии от указанного движущегося объекта, при этом указанный основной блок прикреплен к указанной основной части в указанном состоянии ожидания.
4. Навигационное устройство по п.1, дополнительно содержащее:
блок модификации корректирующих значений, предназначенный для модификации указанных корректирующих значений исходя из результатов определения указанного геомагнетизма и для модификации уровня корректировки, который показывает степень модификаций корректирующих значений;
при этом блок процесса инициализации инициализирует указанные уровни корректировки в дополнение к указанным корректирующим значениям в случае переключения из указанного состояния ожидания в указанное обычное рабочее состояние, осуществляемого блоком переключения рабочего состояния.
5. Навигационное устройство по п.1,
в котором указанный блок вычисления направления сохраняет часть прошлых определенных значений и вычисляет направление указанного основного блока на основе указанных сохраненных прошлых определенных значений в дополнение к указанным корректирующим значениям и указанным определенным значениям;
и в котором блок процесса инициализации инициализирует указанные корректирующие значения и удаляет указанные сохраненные прошлые определенные значения в случае переключения из указанного состояния ожидания в указанное обычное рабочее состояние, осуществляемого блоком переключения рабочего состояния.
6. Способ инициализации корректирующих значений, включающий в себя следующие этапы:
измеряют текущее местоположение с помощью заранее заданного блока проведения измерений;
определяют геомагнетизм с помощью геомагнитного датчика, который расположен на заранее заданном основном блоке;
вычисляют направление указанного основного блока с помощью заранее заданного блока вычисления направления, после установки корректирующих значений, предназначенных для корректировки определенных заранее значений геомагнетизма, что делается на основе указанных определенных значений и указанных корректирующих значений;
показывают пользователю результаты измерений, полученные от блока проведения измерений, и результаты вычисления указанного местонахождения;
с помощью заранее заданного блока переключения рабочего состояния переключают между обычным рабочим состоянием, в котором выполняют указанный процесс показа, и состоянием ожидания, в котором поддерживается часть состояния процессов и останавливается, по меньшей мере, процесс вычисления указанного направления; и
инициализируют корректирующие значения с помощью заранее заданного блока осуществления инициализации в случае перехода из указанного состояния ожидания в указанное обычное рабочее состояние, при этом указанный переход осуществляется блоком переключения рабочего состояния.
7. Сотовый телефон с навигационными возможностями, содержащий:
блок проведения измерений, предназначенный для измерения текущего местоположения;
геомагнитный датчик, расположенный в заранее заданном основном блоке и предназначенный для определения геомагнетизма;
блок вычисления направления, предназначенный для вычисления направления указанного основного блока, после установки корректирующих значений, нужных для корректировки определенных значений указанного геомагнетизма на основе указанных определенных значений и указанных корректирующих значений;
блок показа информации, предназначенный для показа пользователю указанных результатов измерений и результатов вычисления указанного направления;
блок переключения рабочего состояния, предназначенный для переключения между обычным рабочим состоянием, в котором выполняется указанный процесс показа, и состоянием ожидания, в котором поддерживается часть состояния процессов и останавливается, по меньшей мере, процесс вычисления указанного направления;
блок процесса инициализации, предназначенный для инициализации корректирующих значений в случае перехода из указанного состояния ожидания в указанное обычное рабочее состояние с помощью указанного блока переключения рабочего состояния; и
блок сотового телефона, предназначенный для осуществления обработки телефонного звонка путем осуществления беспроводной связи с заранее заданной базовой станцией.
| JP 2008076374 A, 03.04.2008 | |||
| US 7925429 B2, 12.04.2011 | |||
| Устройство тревожной сигнализации для нескольких объектов | 1990 |
|
SU1805483A1 |
| US 7706977 B2, 27.04.2010 | |||
| US 7538723 B2, 26.05.2009. | |||

