Изобретение относится к области приборостроения, а точнее к областям вычислительной техники и оптико-электронных систем, предназначенных для управления сканирующим устройством с целью поиска, захвата и автосопровождения движущегося объекта.
Известны технические решения, описанные в патентах US №4071744, НПК 364/105 (МПК G05B 13/02), публ. 31.01.78 и US №4825055, НПК 235/411 (МПК G01S 7/46), публ. 04.25.89, в которых сенсор наводится на объект и отслеживает с помощью сканирующего (головного) зеркала изменение его положения, при этом измеряется угол рассогласования между датчиком (сенсором) и положением объекта и по полученной информации формируется управляющий сигнал.
Недостатком способов формирования следящей системой сигнала управления сканирующим зеркалом в указанных изобретениях является низкая точность сопровождения объекта вследствие неустраненного динамического запаздывания линии визирования сканирующего зеркала относительно положения объекта, что вызвано отсутствием в алгоритме учета ошибки запаздывания, появляющегося при управлении в дискретных следящих системах.
Также известно изобретение по патенту US 5422829, НПК 364/516 (МПК G01S 7/00), публ. 06.06.95 («Способ управления следящей системой»), которое выбрано в качестве прототипа, так как данному техническому решению присуща совокупность признаков, наиболее близкая к совокупности существенных признаков заявляемого объекта. Данный способ формирования сигнала управления следящей системой основан на циклическом измерении последовательности сигналов об угле рассогласования между линией визирования и направлением на объект, прогнозировании положения объекта на основе текущих данных о его траектории, определении величины смещения объекта от предсказанной траектории непосредственно в процессе измерения и проведении по результатам сравнения (текущего измерения и прогнозного значения) корректировки текущей траектории движения линии визирования следящей системы. Таким образом, по информации, полученной в результате анализа последовательности сигналов рассогласования, вносят изменения в алгоритм коррекции определения положения объекта. На основе скорректированной траектории объекта производят прогнозирование его нового положения. Аналогичным образом выполняют всю вышеописанную последовательность действий для каждого последующего цикла измерения.
Несмотря на то, что данное изобретение решает проблему динамического запаздывания, оно не обеспечивает достаточной точности слежения из-за отсутствия адаптивности алгоритма формирования сигнала управления к широкому диапазону изменения скорости входного сигнала рассогласования.
Задача, решаемая предлагаемым изобретением - совершенствование процедуры обработки последовательности измеряемых сигналов рассогласования.
Решение указанной задачи достигается тем, что в способе формирования сигнала управления следящей системой, основанном на последовательном циклическом измерении угла рассогласования между направлением на объект и линией визирования управляемого устройства, и коррекции сигнала рассогласования на базе прогноза с учетом запаздывания в контуре управления в предлагаемом техническом решении, на первом и втором циклах измерений сигнал управления формируют по текущему измерению угла рассогласования; со второго цикла измерения прогнозируют угол рассогласования на время цикла измерения по вариантам гипотез для прогноза: кривым первого и второго порядков с использованием при определении их коэффициентов от 2 до N последних измеренных и запомненных углов рассогласования (N≤Nmax); с третьего цикла на текущем цикле измерений из вариантов гипотез, для которых был сделан прогноз на предыдущем цикле, выбирают тот, который обеспечивает минимум погрешности между прогнозом по гипотезе и текущим измерением угла рассогласования; для кривой соответствующего ему порядка по соответствующему количеству используемых измерений угла рассогласования, включая текущее, определяют коэффициенты кривой для экстраполяции сигнала рассогласования; экстраполируют его в соответствии с ней на время запаздывания в контуре управления и скорректированное значение угла рассогласования направляют для формирования сигнала управления.
Технический результат, обеспечиваемый приведенной совокупностью признаков, выражается в повышении точности слежения за объектом.
Причинно-следственная связь между совокупностью приведенных признаков способа и указанным техническим результатом выражается в том, что в предлагаемом изобретении реализован адаптивный алгоритм формирования сигнала управления к изменению ускорения сопровождаемого объекта, заключающийся в том, что выбор порядка кривой для экстраполяции с целью учета запаздывания в следящей системе и длины последовательности используемых измерений угла рассогласования при определении ее коэффициентов производится автоматически в текущем цикле формирования сигнала управления.
В результате в изобретении при небольших ускорениях сопровождаемого объекта (на больших дальностях и/или малых относительных угловых эволюциях объекта) большая точность слежения для учета запаздывания достигается при выборе линейной экстраполяции с достаточно большой длиной используемой последовательности измерений при определении ее коэффициентов, при больших ускорениях - при выборе квадратичной экстраполяции с малой длиной используемой последовательности измерений.
Для пояснения сущности изобретения на предлагаемой фигуре изображена схематично блок-схема ОЭС (ориентировочный состав устройства), реализующая процесс выполнения действий над материальным объектом (измеряемым сигналом) с помощью материальных средств (оптико-электронной системы), поясняющая последовательность физических действий в цикле измерений.
Оптико-электронная система включает:
- оптико-механический блок (ОМБ) 1 с оптической системой и сканирующим устройством;
- следящую систему 2, состоящую из блока измерения сигнала рассогласования с фотоприемным устройством (ФПУ) 3, исполнительного устройства 4, блока формирования сигнала управления 5 и вычислительного блока 6.
Вычислительный блок 6 включает блок выбора вариантов кривой для формирования скорректированного сигнала рассогласования 7 (блок прогноза), определитель коэффициентов кривой для экстраполяции вида aΔt2+bΔt+c8,
где a, b, c=Δφ - коэффициенты, Δt - время экстраполяции, Δφ - угол рассогласования.
Кроме того, в блок 6 входят буфер массива (блок памяти) последних Nmax измерений (Δφ) 9, формирователь сигнала рассогласования, скорректированного на время запаздывания в контуре управления 10, формирователь матрицы коэффициентов вариантов кривой для прогнозов 11, буфер (блок памяти) прогнозов (Δφ[2Nmax-3]) 12 и формирователь прогнозов рассогласования на следующий цикл измерений для различных вариантов кривой 13.
Рассмотрим организацию работы оптико-электронной системы:
- ОМБ 1 в режиме слежения фиксирует сцену с объектом в ней в виде отдельных кадров на ФПУ;
- с помощью блока измерения сигнала рассогласования 3 измеряют угловое рассогласование между объектом и линией визирования системы 1 (центром кадра). При этом углы рассогласования объекта служат исходной информацией для управления приводами слежения, например, приводами двухосных поворотов следящего зеркала ОМБ 1;
- каждый измеренный отсчет сигнала рассогласования (Δφ) из блока 3 транслируют в вычислительный блок 6 для запоминания в буфере 9 массива последних Nmax измерений (например Nmax=16); при этом, если буфер уже заполнен, первое по счету измерение удаляется;
- кроме того, измеренный отсчет поступает в блок 7 для выбора варианта кривой, характеризующегося порядком (1 - линейной или 2 - квадратичной) и количеством измерений угла рассогласования (N от 2 до Nmax), используемых при определении ее коэффициентов; для первых двух циклов устанавливается порядок кривой 1, N=1 (линейка с нулевым наклоном), для третьего цикла - порядок кривой 1, N=2; начиная с четвертого цикла производится выбор варианта кривой из возможных вариантов (от 3 до 2Nmax-3), для которых в блоке 13 в предыдущем цикле был сделан прогноз угла рассогласования на текущий цикл измерений; выбор производится по критерию минимума погрешности между значением прогноза угла рассогласования для варианта кривой, извлекаемого из буфера 12, и текущим измеренным отсчетом угла рассогласования; результаты выбора поступают в блок 8;
- в блоке 8 производится определение коэффициентов a, b, c кривой вида aΔt2+bΔt+c (где c=Δφ) по выбранному в блоке 7 порядку кривой с использованием выбранного количества N последних измерений угла рассогласования из буфера 9 (включая текущее);
- в блоке 10 в соответствии с определенными коэффициентами кривой aΔt2+bΔt+c производится коррекция сигнала рассогласования на время (Δt) запаздывания в контуре управления следящей системы; скорректированное рассогласование передается в блок 5 для формирования сигнала управления для исполнительного устройства 4 сканирующего блока ОМБ 1;
- после этого в блоке 11, начиная со второго цикла измерений, производят формирование матрицы коэффициентов a, b, c для возможных (от 1 до 2Nmax-3 в зависимости от накопленного количества измерений) вариантов кривых для прогноза на следующий цикл измерения; в соответствии с ними в блоке 13 производится прогноз на следующий цикл измерения сигналов рассогласования для всех возможных вариантов с запоминанием их в буфере 12.
Таким образом, использование данного изобретения в следящей прецизионной системе, работающей на основе измеренной последовательности углов рассогласования, обеспечивает ее работу с повышенной точностью при широком диапазоне изменения скоростей объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ОСИ АНТЕННЫ БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ПРИ СОПРОВОЖДЕНИИ МЕНЕВРИРУЮЩЕЙ ВОЗДУШНОЙ ЦЕЛИ | 2020 |
|
RU2758446C1 |
| СПОСОБ ФОРМИРОВАНИЯ УПРАВЛЕНИЯ ПРИВОДАМИ ИСПОЛНИТЕЛЬНОГО УСТРОЙСТВА В ОПТИКО-ЭЛЕКТРОННЫХ СИСТЕМАХ СОПРОВОЖДЕНИЯ И УСТРОЙСТВО, РЕАЛИЗУЮЩЕЕ ОПТИКО-ЭЛЕКТРОННУЮ СИСТЕМУ СОПРОВОЖДЕНИЯ | 2006 |
|
RU2310888C1 |
| ТЕЛЕВИЗИОННЫЙ АДАПТИВНЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1988 |
|
SU1623536A1 |
| СПОСОБ ПРИЦЕЛИВАНИЯ И НАВЕДЕНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ | 2009 |
|
RU2413159C1 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ОБЪЕКТОМ И ЦИФРОВАЯ ТЕЛЕВИЗИОННАЯ СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2440691C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ОБЪЕКТА И СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ЛУЧА ПРИЕМНО-ПЕРЕДАЮЩЕГО АНТЕННОГО УСТРОЙСТВА СИСТЕМЫ СОПРОВОЖДЕНИЯ ОБЪЕКТА | 2011 |
|
RU2476904C1 |
| ГИРОСКОПИЧЕСКОЕ СЛЕДЯЩЕЕ ЗА ЦЕЛЬЮ УСТРОЙСТВО САМОНАВОДЯЩЕЙСЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ РАКЕТЫ | 2009 |
|
RU2397435C1 |
| КОМПЛЕКСНЫЙ ИЗМЕРИТЕЛЬ ДАЛЬНОСТИ, СКОРОСТИ И УГЛОВЫХ КООРДИНАТ ДЛЯ РАДИОТЕХНИЧЕСКИХ СИСТЕМ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2003 |
|
RU2251711C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| Устройство для автоматического сопровождения объекта слежения | 2018 |
|
RU2694888C1 |
Изобретение относится к области приборостроения. Сущность изобретения состоит в том, что в способе формирования сигнала управления в следящей системе, основанном на последовательном циклическом измерении угла рассогласования (УС) между направлением на объект и линией визирования управляемого устройства, и коррекции сигнала рассогласования на базе прогноза с учетом запаздывания в контуре управления, указанные сигналы управления на первом и втором циклах измерения формируют по текущему измерению УС; со второго цикла измерения прогнозируют УС на время цикла измерения по вариантам гипотез для прогноза: кривым первого и второго порядков с использованием при определении их коэффициентов от 2 до N последних измеренных и запомненных УС (N≤Nmax); с третьего цикла на текущем цикле измерений из вариантов гипотез, для которых был сделан прогноз на предыдущем цикле, выбирают тот, который обеспечивает минимум погрешности между прогнозом по гипотезе и текущим измерением УС; для кривой соответствующего ему порядка по соответствующему количеству используемых измерений УС, включая текущее, определяют коэффициенты кривой для экстраполяции сигнала рассогласования; экстраполируют его в соответствии с ней на время запаздывания в контуре управления и скорректированное значение УС направляют для формирования сигнала управления. Достигаемый технический результат - повышение точности слежения за объектом при широком диапазоне изменения скорости входного сигнала рассогласования. 1 ил.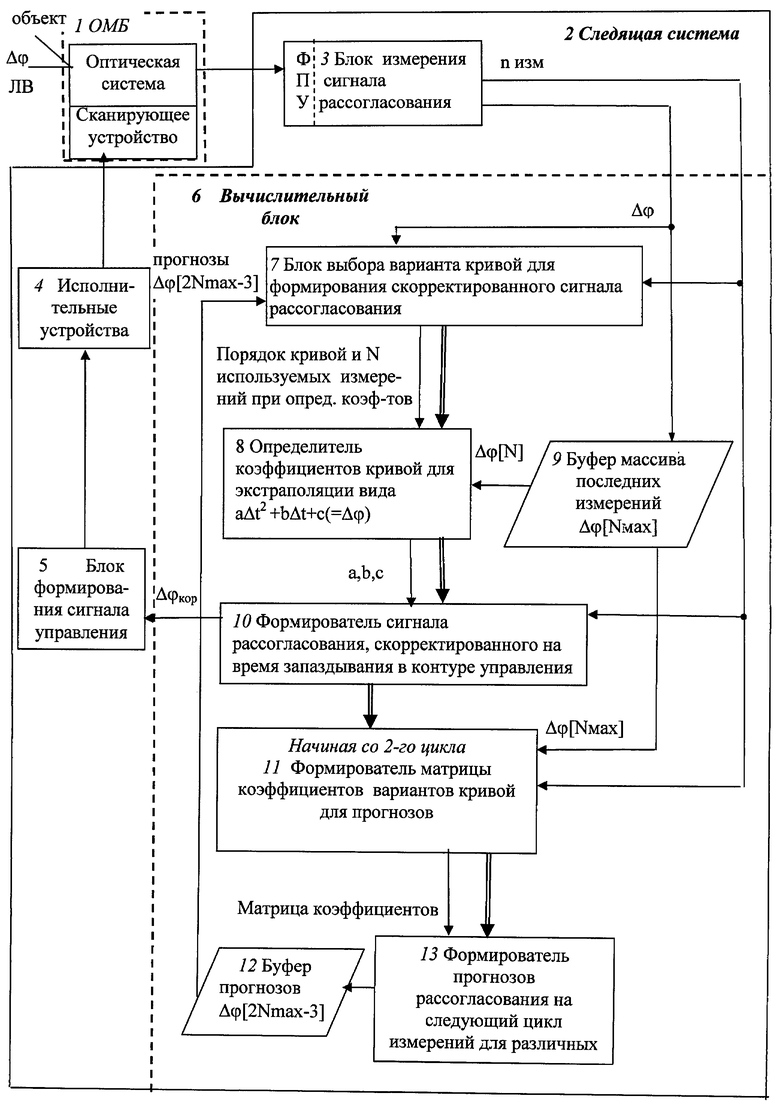
Способ формирования сигнала управления в следящей системе, основанный на последовательном циклическом измерении угла рассогласования между направлением на объект и линией визирования управляемого устройства, и коррекции сигнала рассогласования на базе прогноза с учетом запаздывания в контуре управления, отличающийся тем, что на первом и втором циклах измерений сигнал управления формируют по текущему измерению угла рассогласования; со второго цикла измерения прогнозируют угол рассогласования на время цикла измерения по вариантам гипотез для прогноза: кривым и первого и второго порядков с использованием при определении их коэффициентов от 2 до N последних измеренных и запомненных углов рассогласования (N≤Nmax); с третьего цикла на текущем цикле измерений из вариантов гипотез, для которых был сделан прогноз на предыдущем цикле, выбирают тот, который обеспечивает минимум погрешности между прогнозом по гипотезе и текущим измерением угла рассогласования; для кривой соответствующего ему порядка по соответствующему количеству используемых измерений угла рассогласования, включая текущее, определяют коэффициенты кривой для экстраполяции сигнала рассогласования; экстраполируют его в соответствии с ней на время запаздывания в контуре управления и скорректированное значение угла рассогласования направляют для формирования сигнала управления.
| US 5422829 А, 06.06.1995 | |||
| СЛЕДЯЩАЯ ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 2001 |
|
RU2211462C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ УДАЛЕННОГО ОБЪЕКТА НА МЕСТНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2242019C2 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМ ЭЛЕМЕНТОМ ОПТИКО-ЭЛЕКТРОННОЙ СЛЕДЯЩЕЙ СИСТЕМЫ | 2008 |
|
RU2371732C1 |
| Предохранительное устройство для защиты пассажиров транспортного средства при его столкновении | 1970 |
|
SU470420A1 |
| US 20090220248 A1, 03.09.2009 | |||
| Однотактный стабилизирующий преобразователь постоянного напряжения | 1984 |
|
SU1405100A1 |

