Изобретение относится к техническим средствам автоматизации, а именно к двухпозиционным регуляторам. Оно может быть использовано при автоматизации работы нагревательных печей, экструдеров и литьевых машин, реакторов, бытовых и промышленных холодильников и иных объектов с двухпозиционным регулированием в них одной технологической величины (температуры, уровня, давления и т.п.) путем подачи на объект позиционных управляющих воздействий типа «включено»/«выключено».
Известны релейные двухпозиционные регуляторы с фиксированными позициями с полным притоком и оттоком (см., например, А.А. Кампе-Немм. Автоматическое двухпозиционное регулирование. М.: Наука, 1967. - 160 с.), у которых управляющие воздействия, соответствующие позициям регулятора, создаются путем полного открытия или полного закрытия исполнительного устройства на линии подачи управляющего воздействия на объект управления, что не обеспечивает качественного регулирования.
Улучшения качества удается добиться путем создания релейных двухпозиционных регуляторов с неполным притоком и оттоком (см., например, там же - А.А.Кампе-Немм. Автоматическое двухпозиционное регулирование. М.: Наука, 1967. - С.27, 28), у которых позиции регулятора, хотя и фиксированные, но являются более близкими по значениям к нагрузке объекта, в сравнении с двухпозиционным релейным регулятором с полным притоком и оттоком, что и позволяет достичь эффекта улучшения качества регулирования.
Введение в статическую характеристику двухпозиционного регулятора прямой зоны неоднозначности (см., например, Клюев А.С. Двухпозиционные автоматические регуляторы и их настройка. М.: Энергия, 1967. - С.9-10) позволяет уменьшить частоту срабатывания исполнительного устройства, но в тоже время приводит к увеличению размаха возникающих колебаний. Если этот размах колебаний лежит в пределах, допустимых по технологии норм, то такую зону вводят ради снижения частоты срабатывания исполнительного устройства.
В ряде случаев, для улучшения качества регулирования в статическую характеристику двухпозиционного регулятора вводят обратную зону неоднозначности (см., например, Бурляев В.В. Исследование релейных систем автоматического регулирования с отрицательным гистерезисом. Канд. дисс. - М.: МЭИ, 1971. - 196 с.), благодаря которой предваряется переключение значения позиции регулятора с нижней на верхнюю или наоборот, чем и достигается улучшение качества.
Дальнейшего улучшения качества регулирования позиционных систем удается достичь путем создания адаптивных позиционных регуляторов.
Известны адаптивные двухпозиционные регуляторы, у которых значения позиций регулятора подстраиваются наиболее близко к нагрузке объекта аналоговым (см., например, пат. РФ №2144690, Кл. G05В 11/16, 2000) или дискретным (см., например, пат. РФ №2129726, Кл. G05В 11/54, 11/16, 1999; пат. РФ №2138071, Кл. G05В 13/02, 11/18, 1999; пат. РФ №2153696, Кл. G05В 11/44, 11/56, 2000; пат. РФ №2158435, Кл. G05В 11/18, 2000; пат. РФ №2362198, Кл. G05В 11/00, 2009) способом, что позволяет еще более улучшить качество регулирования в сравнении с релейными двухпозиционными регуляторами (или двухпозиционными регуляторами с зоной неоднозначности) с неполным притоком или оттоком, но с фиксированными позициями. Однако конструкции таких регуляторов достаточно сложны.
Известны адаптивные двухпозиционные регуляторы с адаптирующимися зонами неоднозначности (см., например, пат. РФ №2155361, Кл. G05В 11/18, 2000), благодаря которым удается определить какую и в каком направлении из позиций регулятора следует адаптировать (верхнюю или нижнюю), что также способствует улучшению качества двухпозиционной системы регулирования благодаря более быстрой адаптации позиций. Однако конструкция такого регулятора достаточно сложна, а кроме того, она не учитывает изменения (кроме нагрузки объекта), связанные с нестационарностью других параметров объекта, например его коэффициента передачи, постоянной времени и запаздывания, в случае аппроксимации объекта апериодическим звеном первого порядка с запаздывающим аргументом, что позволило бы еще более улучшить качество регулирования.
Эти недостатки устраняются в предлагаемом изобретении, цель которого - улучшение качества позиционной системы регулирования (релейной или с прямой зоной неоднозначности) путем создания адаптивной приставки (к двухпозиционному регулятору существующей системы двухпозиционного регулирования), адаптирующей значения заданий существующего регулятора с учетом как меняющейся нагрузки объекта, так и нестационарных его параметров. При этом предложенная система в целом, с одной стороны, обладает свойствами системы двухпозиционного регулирования с обратной зоной неоднозначности, т.е. свойствами предварения, а с другой - эта зона становится адаптивной к нагрузке и нестационарным параметрам объекта. При этом конструкция приставки и системы в целом существенно проще, чем система по патенту РФ №2155361, Кл. G05В 11/18, 2000 (прототип).
На фигуре 1 представлена функциональная схема устройства предлагаемой адаптивной двухпозиционной системы регулирования. Устройство содержит входные каналы задания 1 и регулируемой величины 2 адаптивной приставки 3, выходной канал 4 адаптивной приставки 3, входной канал 5 существующей системы 6 двухпозиционного регулирования, алгебраические сумматоры 7 и 8 соответственно адаптивной приставки 3 и существующей системы 6, отрицательные входы которых показаны черным цветом, двухпозиционные пороговые элементы 9 и 10 с прямой зоной неоднозначности (в частном случае с релейной характеристикой, т.е. с нулевой зоной неоднозначности) соответственно существующей системы 6 и адаптивной приставки 3, блок идентификации (БИ) 11, блок дифференцирования (d/dt) 12, блок вычисления корректирующей добавки (К) 13, объект управления (ОУ)14 и выходной канал 15 существующей системы 6, образуемой элементами 5, 8, 9, 14 и 15. При этом на двухпозиционный регулятор, образуемый элементами 5, 8 и 9, существующей системы 6, во входной канал 5 подается сигнал задания g(t) с выходного канала 4 адаптивной приставки 3, образуемой элементами 1, 2, 4, 7, 10, 11, 12 и 13. Во входной канал 1 адаптивной приставки 3 подается сигнал задания g'(t), а в ее входной канал 2 - сигнал регулируемой величины y(t) с выходного канала 15 существующей системы 6 двухпозиционного регулирования, т.е. сигнал с объекта управления 14. В существующей системе 6 на вход двухпозиционного порогового элемента 9 подается сигнал рассогласования ε(t)=g'(t)-y(t), а на его выходе имеем сигнал управляющего воздействия на объект управления 14 - u(t). На выходе блока дифференцирования 12 адаптивной приставки 3 имеем сигнал производной от его входного сигнала y(t), т.е. сигнал y'(t)=dy(t)/dt, а на выходе двухпозиционного порогового элемента 10 двухпозиционный сигнал z(t), на который домножается затем сигнал, формируемый в блоке вычисления корректирующей добавки 13, на выходе которого и формируется двухпозиционный сигнал коррекции γ, причем этот сигнал является как функцией нагрузки объекта, так и функцией идентифицируемых блоком идентификации 11 параметров объекта управления 14, при его аппроксимации апериодическим звеном первого порядка с запаздывающим аргументом, а именно его коэффициента передачи К, постоянной времени Т и запаздывания τ.
Таким образом, поставленная цель - улучшение качества позиционной системы регулирования достигается тем, что к существующей системе 6 двухпозиционного регулирования подключается адаптивная приставка 3, которая в зависимости от значения выходного сигнала существующей системы y(t) формирует добавочный двухпозиционный сигнал коррекции γ, определяемый как нагрузкой объекта управления 14, так и его нестационарными параметрами, который суммируется с сигналом задания приставки g(t) и подается в качестве сигнала задания g'(t) на двухпозиционный регулятор существующей системы 6 двухпозиционного регулирования. Одновременно достигается и другая цель - упрощение конструкции системы адаптивного позиционного регулирования в сравнении с устройством подобной системы, реализуемой по способу прототипа.
Устройство работает следующим образом.
Рассмотрим вначале работу существующей системы 6 двухпозиционного регулирования для случая описания объекта управления 14 апериодическим звеном первого порядка с запаздывающим аргументом, т.е. с объектом, передаточная функция которого имеет вид:

где K - коэффициента передачи объекта, Т - его постоянная времени, а τ - время запаздывания объекта.
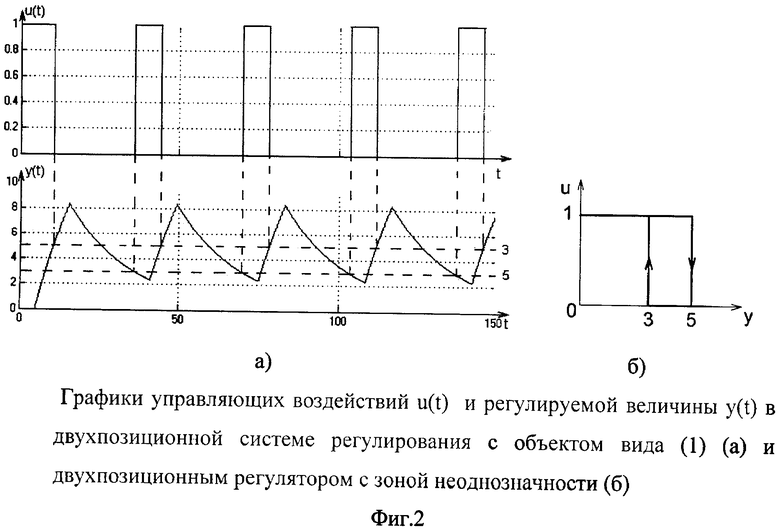
На фигуре 2 представлены графики переходного процесса регулируемой величины y(t) и графики управляющих воздействий на объект управления u(t), которые будут иметь место в существующей системе 6 двухпозиционного регулирования с объектом вида (1) (фиг.2а) и двухпозиционным регулятором с зоной неоднозначности (фиг.2б). При этом участки кривой переходного процесса описываются выражениями вида:

Выходной сигнал y(t) существующей системы 6 через канал 15 подается во входной канал 2 адаптивной приставки 3.
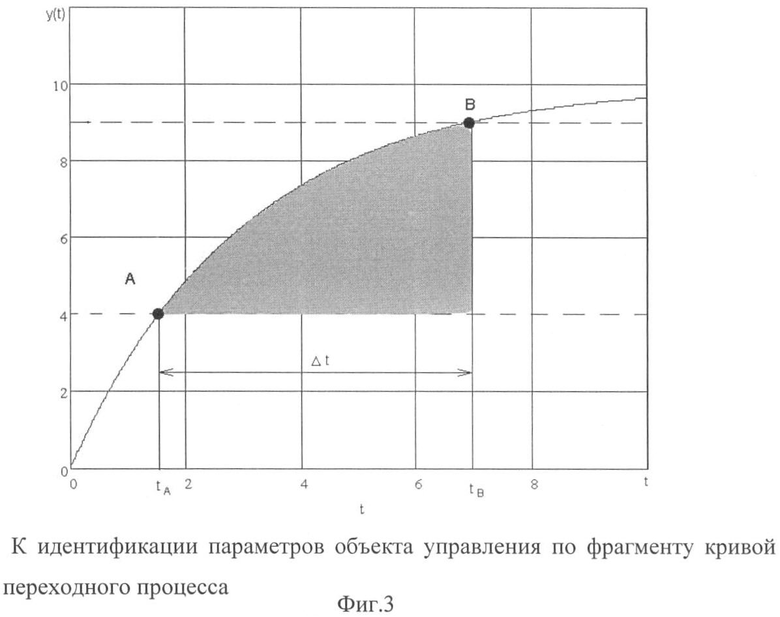
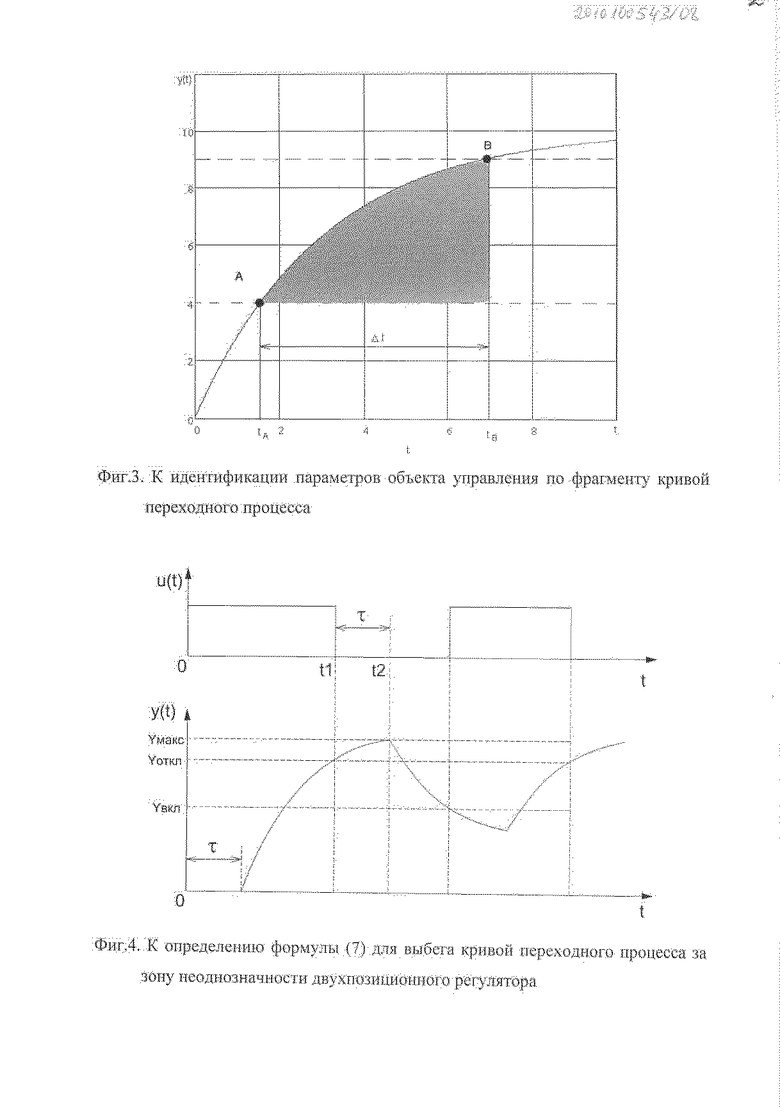
Работа блока идентификации 11 адаптивной приставки 3 основана на выделении экспоненциального участка, соответствующего выражению (2), и определения на нем следующих информативных параметров, показанных на фигуре 3:
Исходя из найденных по (3) величин параметры передаточной функции объекта управления 14 идентифицируются согласно формулам:

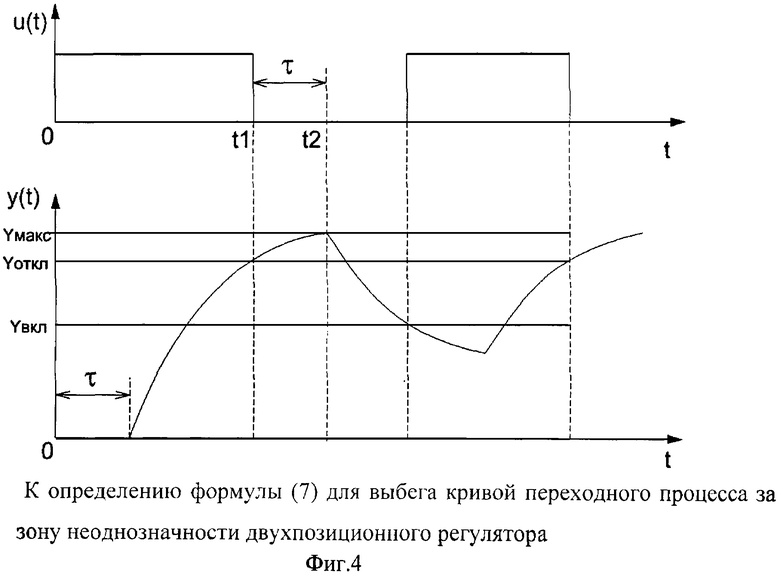
а величина запаздывания τ определяется по величине временного сдвига между моментом подачи управляющего воздействия и моментом реакции объекта управления на это воздействие или как разность: τ=t2-t1 (см. ниже фиг.4). (6)
Зная параметры объекта управления, идентифицированные блоком идентификации 11, рассмотрим алгоритм адаптации, реализованный в адаптивной приставке 3. Рассмотрим графики переходных процессов в системе двухпозиционного регулирования, показанные на фигуре 4, аналогичные графикам фигуры 2, но с учетом ярко выраженного запаздывания в объекте τ и с введением уровней сигналов Yоткл и Yвкл, при которых происходит переключение управляющего воздействия, а также введем максимального значения регулируемой величины Yмакс, при котором происходит изменение знака ее скорости. При этом разница Yоткл-Yвкл соответствует зоне неоднозначности двухпозиционного регулятора. Через t1 и t2 на фигуре 4 обозначены моменты переключения управляющего воздействия и изменения знака скорости регулируемой величины.
Исходя из выражения (2) найдем выражение для величины выбега регулируемой величины при u(t)=1:


Как видно, величина выбега зависит от соотношения Т/Т объекта и значения Yоткл. Так как параметры объекта идентифицированы, то величиной выбега можно управлять путем корректировки задания g(t), т.е. путем изменения значения Yоткл. При этом корректировка заключается в следующем: при нарастании сигнала регулируемой величины y(t) уровень переключения управляющего воздействия настраивается на изменение знака скорости регулируемой величины при значении Yоткл. Для получения изменения знака при этом значении будем переключать регулятор при значении регулируемой величины, условно обозначенном как Yоткл.опт, причем Yоткл.опт<Yоткл. Для достижения этого значения будем из сигнала задания g(t) вычитать сигнал коррекции γ, значение которого при z(t)=1 находится аналогично (7) по формуле (8)

Блоки 12 и 10 позволяют предварить и определить знак сигнала коррекции γ, а блок 13 вычисляет значение сигнала γ по выражению (8) с учетом полученных путем идентификации в блоке 11 значений параметров объекта: коэффициента передачи К, постоянной времени Т и запаздывания τ. На алгебраическом сумматоре 7 сигнал коррекции γ суммируется с сигналом задания g(t), и полученный результирующий сигнал задания g'(t) по каналам 4 и 5 подается на алгебраический сумматор 8 двухпозиционного регулятора существующей системы 6 двухпозиционного регулирования. Кроме того, переключение управляющих воздействий u(t) происходит в зависимости от нагрузки объекта управления 14.
Как видно из фигуры 1, первоначальная структура существующей системы 6 двухпозиционного регулирования не претерпела никаких изменений. Подключенная к каналам 5 и 15 существующей системы 6 адаптивная приставка 3 вносит изменение лишь в задание, что не требует значительных изменений и переделок в существующей системе. Кроме того, так как задающее воздействие, как правило, формируется в виде маломощных сигналов, то техническая реализация адаптивной приставки 3 не потребует дорогостоящих силовых элементов. Адаптивная система двухпозиционного регулирования для управления мощной нагрузкой будет использовать уже существующие силовые цепи существующей системы 6 двухпозиционного регулирования. С помощью предлагаемой адаптивной приставки 3 можно достичь требуемых (желаемых) границ колебаний регулируемой величины, что позволяет существенно повысить качество регулирования уже имеющихся систем двухпозиционного регулирования или создавать новые системы адаптивного двухпозиционного регулирования на базе предложенной адаптивной приставки взамен сложных устройств управления. Предлагаемая адаптивная приставка может оказаться также особенно эффективной при создании адаптивных двухпозиционных систем для объектов управления с большим запаздыванием.
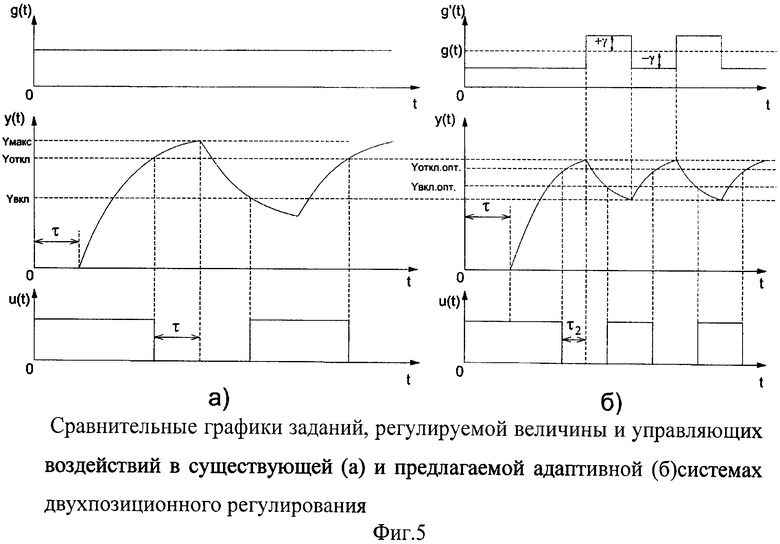
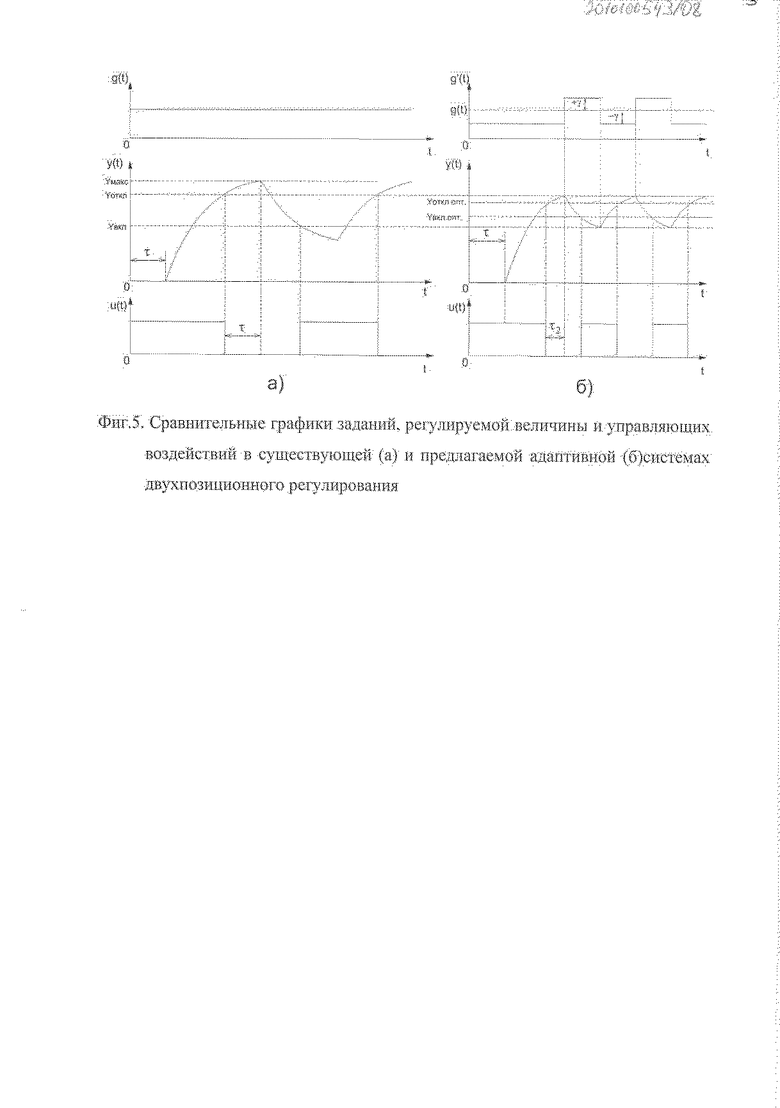
Разницу в функционировании существующей системы 6 двухпозиционного регулирования и системы, дополненной адаптивной приставкой 3, наглядно показывают графики, представленные на фигуре 5. За счет адаптации на величину ±γ величины сигнала задания g'(t), подаваемого во входной канал 5 существующей системы 6 двухпозиционного регулирования с выходного канала 4 адаптивной приставки 3, уменьшается время выбега регулируемой величины y(t) за зону неоднозначности регулятора со значения τ0 до значения τ2. Однако вследствие фактического уменьшения зоны неоднозначности в предлагаемой, в соответствии с фигурой 1, адаптивной двухпозиционной системе регулирования увеличивается частота срабатывания регулятора и, как следствие, исполнительного устройства системы. В то же время, это оправдано тем, что в системе поддерживается требуемое (желаемое) качество регулирования технологической величины объекта управления.
Таким образом, предложенная приставка позволит существенно повысить качество регулирования в автоматических системах управления с применением двухпозиционных регуляторов и объектами с большим временем запаздывания.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕАЛИЗАЦИИ ДВУХПОЗИЦИОННОГО РЕГУЛЯТОРА | 2007 |
|
RU2362198C1 |
| СИСТЕМА АДАПТИВНОГО ДВУХПОЗИЦИОННОГО УПРАВЛЕНИЯ | 2010 |
|
RU2430398C1 |
| СПОСОБ АДАПТИВНОГО ДВУХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 2012 |
|
RU2498386C1 |
| АДАПТИВНЫЙ ТРЕХПОЗИЦИОННЫЙ РЕГУЛЯТОР | 2010 |
|
RU2408913C1 |
| СПОСОБ АДАПТИВНОГО ТРЕХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 2012 |
|
RU2474856C1 |
| УСТРОЙСТВО И СПОСОБ АВТОМАТИЧЕСКОГО ПОДАВЛЕНИЯ ВИБРАЦИИ ПОМОЛЬНО-СМЕСИТЕЛЬНОГО АГРЕГАТА | 2015 |
|
RU2600688C1 |
| СПОСОБ РЕАЛИЗАЦИИ ТРЕХПОЗИЦИОННОГО РЕГУЛЯТОРА | 2001 |
|
RU2220432C2 |
| ПНЕВМАТИЧЕСКИЙ ПОЗИЦИОННЫЙ РЕГУЛЯТОР | 1997 |
|
RU2153696C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО ДВУХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 1996 |
|
RU2129726C1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 1997 |
|
RU2113004C1 |
Изобретение относится к техническим средствам автоматизации, а именно к двухпозиционным регуляторам. Технический результат заключается в улучшении качества позиционных систем регулирования путем подключения к ним адаптивной приставки. Он достигается тем, что адаптивная приставка к двухпозиционному регулятору содержит входные каналы задания и регулируемой величины, выходной канал, алгебраический сумматор, на плюсовой вход которого через входной канал задания подается сигнал задания, при этом она дополнительно содержит блок идентификации параметров объекта управления, вход которого соединен с входным каналом регулируемой величины и одновременно с входом блока дифференцирования, а его выход связан с входом блок вычисления корректирующей добавки, выходной сигнал которого подается на отрицательный вход алгебраического сумматора, результирующий сигнал которого подается в выходной канал адаптивной приставки, выходной сигнал блока дифференцирования подается на вход двухпозиционного порогового элемента, выходной сигнал которого, в свою очередь, подается на вход блока вычисления корректирующей добавки. 5 ил.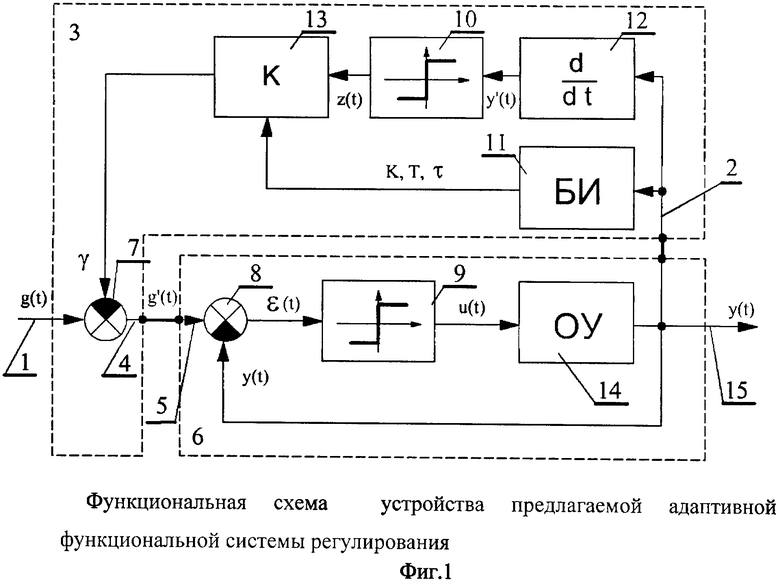
Адаптивная приставка к двухпозиционному регулятору, содержащая входные каналы задания и регулируемой величины, выходной канал, алгебраический сумматор, на плюсовой вход которого через входной канал задания подается сигнал задания, отличающаяся тем, что она дополнительно содержит блок идентификации параметров объекта управления, аппроксимируемого апериодическим звеном первого порядка с запаздывающим аргументом, вход которого соединен с входным каналом регулируемой величины и одновременно с входом блока дифференцирования, а его выход в виде значений идентифицированных параметров объекта управления - коэффициента передачи, постоянной времени и запаздывания подается на блок вычисления корректирующей добавки, выходной сигнал которого подается на отрицательный вход алгебраического сумматора, результирующий сигнал которого подается в выходной канал адаптивной приставки, выходной сигнал блока дифференцирования подается на вход двухпозиционного (релейного или с прямой зоной неоднозначности) порогового элемента, выходной сигнал которого, в свою очередь, подается на вход блока вычисления корректирующей добавки.
| СПОСОБ АВТОМАТИЧЕСКОГО ДВУХПОЗИЦИОННОГО РЕГУЛИРОВАНИЯ | 1997 |
|
RU2155361C2 |
| СПОСОБ РЕАЛИЗАЦИИ ДВУХПОЗИЦИОННОГО РЕГУЛЯТОРА | 2007 |
|
RU2362198C1 |
| Многоканальный регулятор | 1988 |
|
SU1564586A1 |
| ОБОЛОЧКА ДЛЯ ПИЩЕВЫХ ПРОДУКТОВ С ШЕРОХОВАТОЙ ИМЕЮЩЕЙ НАТУРАЛЬНЫЙ ВИД ПОВЕРХНОСТЬЮ, СПОСОБ ИЗГОТОВЛЕНИЯ ОБОЛОЧКИ И ЕЕ ПРИМЕНЕНИЕ | 2003 |
|
RU2310331C2 |

