Область техники
Настоящее изобретение, в общем, применимо в области электроприводов для двигателей.
В частности, настоящее изобретение относится к управлению двигателем электроприводами, обычно оснащенными инверторами.
Уровень техники
В современной технике двигатели являются одними из наиболее широко используемых элементов в разных применениях. Разработаны и используются многие типы разных двигателей по конкретным типам применения. Например, двигатели могут быть сгруппированы в синхронные и асинхронные двигатели или двигатели постоянного или переменного тока.
В любом случае, все больше ощущается необходимость в повышении КПД таких двигателей. В свете вышеизложенного существуют много применений, в которых двигатели могут развивать переменный вращающий момент в разное время эксплуатации. По этой причине, чтобы повысить КПД, может быть полезным изменить частоту вращения двигателя, чтобы избежать потерь энергии, когда двигатель может работать с небольшой частотой вращения.
Так, используются электроприводы с инверторами, которые приспособлены для регулирования частоты вращения двигателя.
Одним из основных способов управления двигателем, реализуемых упомянутыми приводами, является векторный способ, одним примером которого является способ ориентации поля.
Вкратце, поскольку двигатель постоянного тока всегда использовался в качестве модели, из-за резкого различия между током возбуждения потока намагничивания и током якоря, создающим вращающий момент, обычным двигателем управляют таким векторным способом, который позволяет разделить ток промышленной частоты на два компонента, известных как прямой ток и квадратурный ток, которые могут быть приравнены к току намагничивания и току якоря постоянного тока, так что двигатель может быть идеально использован в качестве вышеупомянутой модели двигателя. Это доведет до максимума эксплуатационные характеристики любого двигателя в смысле вращающего момента на разных частотах вращения, точности частоты вращения и КПД.
При векторном управлении прямой ток подобен току намагничивания, тогда как квадратурный ток соответствует току якоря. Создание вращающего момента управляется путем регулирования квадратурного тока после определения специфического для двигателя прямого тока.
Одним конкретным примером является синхронный реактивный двигатель, где, как сказано выше, управление прямьм током может быть заменено управлением прямым магнитным потоком.
Рассматривая пример векторного способа с ориентацией поля при управлении двигателем, известным из уровня техники, можно получить готовый ответ только путем установки прямого тока на номинальное значение, тогда как квадратурный ток устанавливается регулятором частоты вращения или вращающего момента. Тем не менее, это влияет на КПД, поскольку двигатель всегда получает электропитание на максимальной мощности, даже в случае минимального требования к вращающему моменту, т.е., когда двигатель может работать с низкой частотой вращения. Другими словами, хотя такая схема поддерживает КПД двигателя без изменений на высоких частотах вращения, КПД снижается, возможно в значительной степени, при низких частотах вращения. По этим причинам известны контроллеры, которые также изменяют прямой ток путем регулирования напряжения на выводах двигателя как функции нагрузки.
Хотя это повышает КПД двигателя путем уменьшения тока, подаваемого на него при низких частотах вращения, это все же имеет тот недостаток, что такое управление является непрямым, не оптимальным для действия на прямой ток.
Кроме того, оно достигается путем подачи заданных прямых токов в присутствии заданных нагрузок. Такое решение явно не оптимальное, особенно в присутствии смешанных нагрузок.
Другими словами, даже когда известные из уровня техники двигатели управляются векторным способом с ориентацией поля для уподобления их двигателю постоянного тока, они все равно имеют потери КПД при низких частотах вращения, хотя управление включает изменение как квадратурного, так и прямого токов.
Конкретным примером являются двигатели с контроллерами, работающими в векторном режиме, без датчика положения или частоты вращения, также известном как векторное управление без датчиков. У этого типа двигателей эта проблема даже более серьезная. Хотя частоту вращения и положение ротора можно определить, используя обратную электродвижущую силу на высоких частотах вращения, собственное сопротивление двигателя препятствует использованию этого способа на низких частотах вращения. Потери напряжения вызывают значащую ошибку при сравнении с абсолютным значением обратной электродвижущей силы. По этой причине на низких частотах вращения дополнительное нулевое среднее, зависящее от времени напряжение добавляется к напряжению электропитания. Подходящие алгоритмы управления, представляющие узел двигатель-инвертер, такой как преобразователь отсчетов резольвера из аналоговой формы в цифровую, где двигатель действует как резольвер, и инвертер декодирует результант в сигнал напряжения, изменяемым добавленным шумом, дают значения, приблизительно пропорциональные разнице между фактическим положением и оцененным положением, причем добавляемый сигнал генерируется в то же время, что и основная составляющая инвертера.
Тем не менее, такое добавленное напряжение на низких частотах вращения индуцирует дополнительную работу в двигателе, что приводит к потере КПД.
Раскрытие изобретения
Цель настоящего изобретения заключается в том, чтобы по меньшей мере частично преодолеть вышеуказанные недостатки, предложив способ управления двигателем, который может увеличить его КПД даже при низких установленных значениях вращающего момента.
Еще одна цель заключается в том, чтобы предложить способ управления двигателем, который может увеличить КПД на низких частотах вращения даже для двигателей без датчиков, т.е. двигателей без датчика определения частоты вращения и положения ротора во время эксплуатации.
Эти и другие цели, которые лучше объяснены ниже, достигнуты способом управления двигателем, который определен в независимом пункте формулы изобретения. В частности, способ использует векторный метод и инвертор. Он, в общем, включает следующие этапы:
- определение значения квадратурного тока Iq, необходимого для двигателя, чтобы создавать желательный вращающий момент;
- вычисление значения прямого тока Id для подачи на двигатель по уравнению:
где kt является фазой вектора тока, от которого, как известно, зависит постоянное значение вращающего момента упомянутого двигателя;
- вычисление тока промышленной частоты упомянутого двигателя посредством упомянутого прямого тока Id и упомянутого квадратурного тока Iq;
- подача упомянутого тока промышленной частоты на упомянутый двигатель упомянутым инвертором.
Другими словами, прямой ток Id не является постоянным, а изменяется с квадратурным током Iq. Это позволяет оптимизировать ток промышленной частоты, подаваемый на двигатель, согласно вращающему моменту, который он должен развивать. В результате, КПД двигателя, управляемого таким образом, оптимизируется. В одном аспекте изобретения вращающий момент, постоянный для двигателя является константой максимального вращающего момента, которая может быть получена при любом состоянии нагрузки и определяется на отдельном этапе, во время которого двигатель характеризуется как функция прямого тока Id и квадратурного тока Iq, чтобы получить кривую константы максимального вращающего момента.
Поэтому изменение прямого тока Id как функция квадратурного тока Iq соотнесена с постоянным значением максимально достижимого вращающего момента, т.е. оптимизация тока промышленной частоты, подаваемого на двигатель, соотнесена с постоянным значением максимального вращающего момента. Это обеспечивает максимальный КПД двигателя.
Те же самые цели также достигнуты устройством управления двигателем, которое реализует вышеуказанным способ. Поэтому устройство будет включать по меньшей мере один инвертор для подачи электропитания на двигатель и средства обработки на упомянутом инверторе для управления подачей электропитания на двигатель.
В одном аспекте изобретения средства обработки предназначены для вычисления тока подачи электропитания из прямого тока Id и квадратурного тока Iq, причем квадратурный ток Iq определяется на основании механического вращающего момента, который двигатель должен контролировать, т.е. поглощать в случае тормозного вращающего момента, или развивать в случае движущего вращающего момента. Прямой ток Id вычисляется средствами обработки по уравнению:
где kt - фаза вектора тока, который определяет постоянное значение вращающего момента двигателя.
Предпочтительные варианты осуществления изобретения определены в соответствии с зависимыми пунктами формулы изобретения.
Например, способ может включать этап кондиционирования прямого тока Id, где значение прямого тока, которое используется для получения значения тока промышленной частоты, ограничено заданным минимальным пороговьм значением.
Поток намагничивания двигателя зависит от прямого тока Id, который препятствует размагничиванию двигателя при минимальных нагрузках.
Также, способ может включать дополнительный этап кондиционирования прямого тока Id, где последний ограничен заданным максимальным предельным значением. Это препятствует насыщению двигателя чрезмерным потоком намагничивания.
Краткое описание чертежей
Другие характеристики и преимущества изобретения будут более очевидными из подробного описания нескольких предпочтительных, неисключительных вариантов осуществления способа управления двигателем и устройства управления, приспособленного для реализации упомянутого способ согласно изобретению, которые описаны как не ограничивающие примеры.
ФИГ.1 - схематический вид способа изобретения.
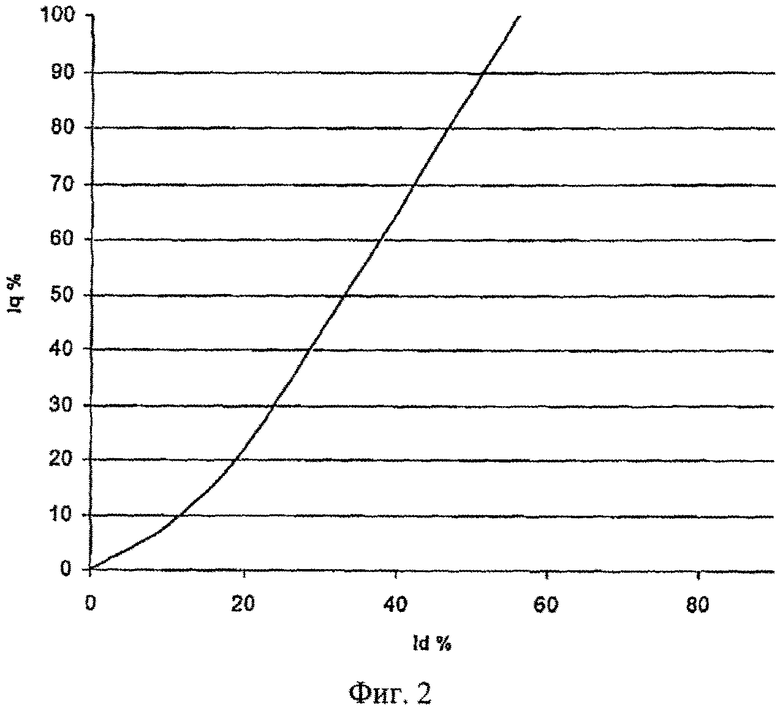
ФИГ.2 - функциональный пример, определяющий точку максимума вращающего момента двигателя как функцию тока промышленной частоты.
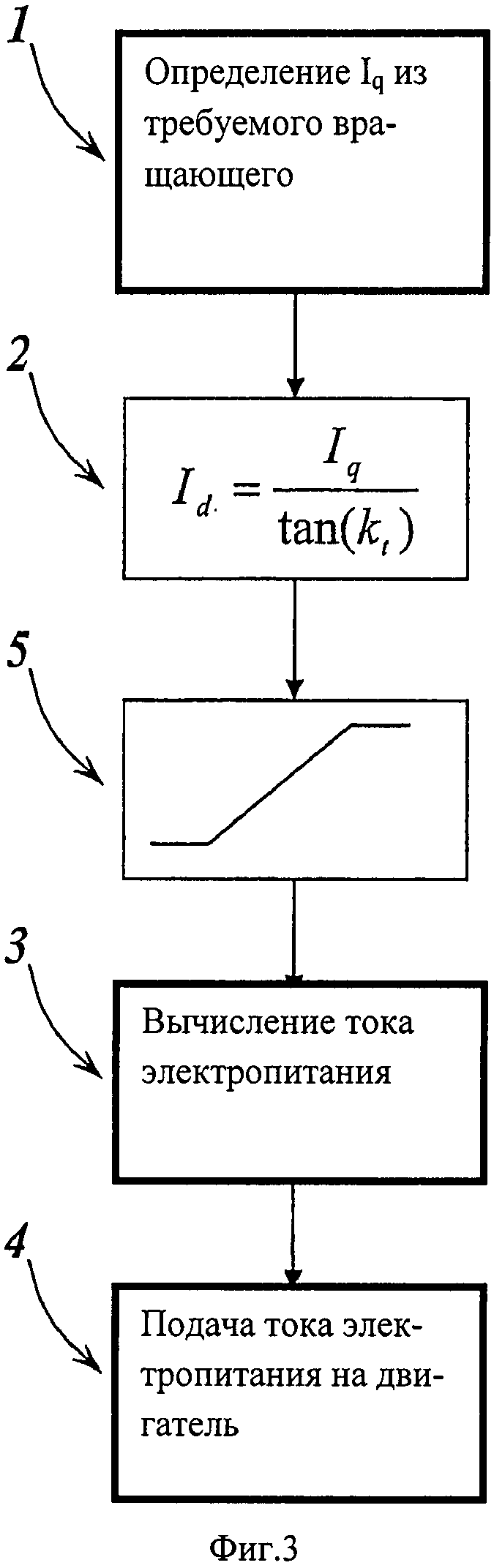
ФИГ.3 - еще один схематический вид способа изобретения.
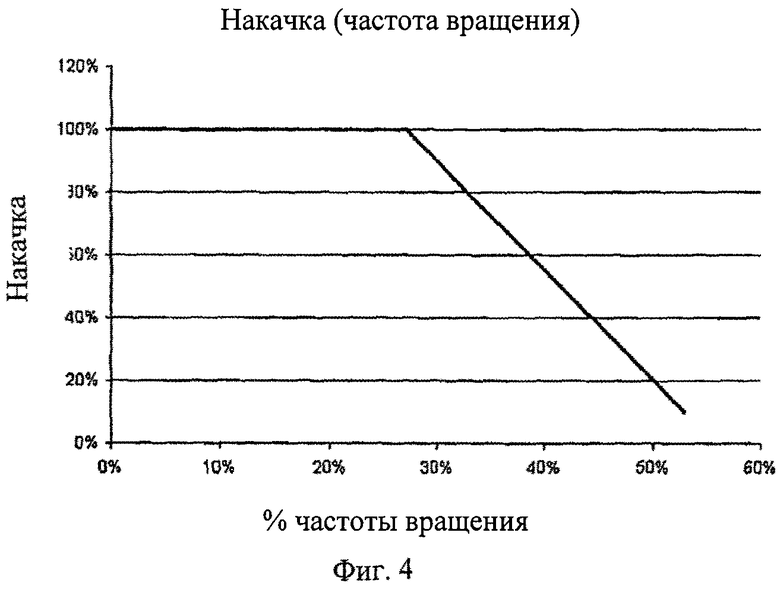
ФИГ.4 - пример кривой, представляющей процент дополнительного напряжения электропитания, подаваемого на двигатель, как функцию процента текущей частоты вращения двигателя.
Подробное описание предпочтительного варианта осуществления
Со ссылкой на ФИГ.1, описан способ управления двигателем векторным методом и инвертором.
Как сказано выше, использование векторного метода позволяет управлять обычным двигателем, как если бы это был двигатель постоянного тока, со всеми вытекающими отсюда преимуществами. Поэтому описанное здесь изобретение будет относиться к обычному двигателю, даже когда оно специально применимо для управления синхронными реактивными двигателями.
Описанный здесь способ включает первый этап, обозначенный цифрой 1, где определяется значение квадратурного тока Iq. Как известно и сказано выше, этот ток отвечает за механический вращающий момент, развиваемый двигателем. Когда известны нагрузка и вращающий момент, который должен развивать двигатель, можно определить квадратурный ТОК Iq.
На последующем этапе, обозначенном цифрой 2, прямой ток Id, который должен быть подан на двигатель, определяют по уравнению:
где kt - фаза тока, который, как известно, соотносится с определяемым постоянным значением вращающего момента двигателя.
Прямой ток Id будет создавать в двигателе поток намагничивания. Как сказано выше, в существующем уровне техники он постоянно выдерживается на номинальном значении или изменяется в соответствии с правилом, относящимся к типу предполагаемой применимой нагрузки, что вызывает потерю КПД двигателя. На низких частотах вращения его можно оптимизировать в соответствии с фактическими требованиями, этим избегая нежелательных потерь. Кроме того, в случае внезапного запроса вращающего момента, выше чем ожидался, система работала неправильно и даже могла быть подвергнута риску полной потери управления из-за отсутствия потока на двигатель.
Поэтому данный способ повышает КПД управляемого двигателя, поскольку прямой ток Id, подаваемый на него, не постоянный и не изменяется согласно ранее оцененному правилу, а изменяется с квадратурным током Iq, т.е., с фактическими требованиями к вращающему моменту, на коэффициент kt вращающего момента.
Когда известны прямой ток Id и квадратурный ток Iq, можно определить ток промышленной частоты, который должен быть подан на двигатель, как показано на этапе 3. На последнем этапе, обозначенном цифрой 4, инвертером управляют для подачи такого тока на двигатель.
В одном аспекте изобретения вычисление тока промышленной частоты соотнесено с типом двигателя. Например, в случае асинхронного двигателя, ток промышленной частоты определяется путем векторного сложения прямого тока Id и квадратурного тока Iq, которые могут быть уподоблены двум векторам, имеющим такой же модуль, как и ранее вычисленные значения.
В случае постоянного тока эти два значения тока подаются на двигатель отдельно конвертером.
В частности, в иллюстративном случае синхронного реактивного двигателя, как и асинхронного двигателя, прямой ток Id непосредственно обеспечивает прямой поток намагничивания, который является релевантным параметром для реализации настоящего патента.
В другом аспекте изобретения постоянное значение Kt вращающего момента двигателя имеет максимально достижимое значение. Это позволяет далее оптимизировать КПД двигателя. Поскольку прямой ток Id и квадратурный ток Iq имеют такие значения, что результирующий вектор имеет постоянный угол, соответствующий максимально достижимому постоянному значению Kt вращающего момента, КПД двигателя при эксплуатации обязательно будет максимальным.
В любом случае, постоянное значение Kt вращающего момента является специфическим параметром двигателя, который обычно определяют на специальном этапе вычисления.
Например, если рассматривать ток промышленной частоты для двигателя как вращающийся вектор с постоянным модулем, точки, в которых создается наибольший вращающий момент, могут быть найдены на круговой траектории такого вектора тока. Когда модуль тока увеличивается, определяется функция, которая определяет соотнесенную с током точку максимального вращающего момента. Поскольку вектор тока промышленной частоты может быть разделен на векторы прямого тока Id и квадратурного тока Iq, то эта определенная функция может быть выражена как функция этих двух токов. Один пример можно найти на ФИГ.2. Например, у синхронных реактивных двигателей эта функция может быть аппроксимирована в линию, наклон которой изменяется как функция технических характеристик двигателя.
Такой параметр также может математически определить разработчик двигателя. При этом понимается, что этот этап выполняется для проверки и/или обновления этого параметра.
В еще одном аспекте изобретения, способ управления включает по меньшей мере один этап кондиционирования прямого тока Id, который обозначен цифрой 4 на ФИГ.3.
В первом примере кондиционирования прямой ток Id, который используется для определения тока промышленной частоты, равен прямому току Id, который определен по вышеприведенному уравнению для значений выше заданного порогового значения и равен такому заданному пороговому значению, когда определенный прямой ток Id ниже такого порогового значения.
Другими словами, прямой ток Id имеет нижнее предельное значение, т.е. минимально допустимое значение, за которым он больше не снижается и которое равно заданному пороговому значению.
Это препятствует полному размагничиванию двигателя, когда последний должен развивать минимальный вращающий момент, и обеспечивает управление двигателем даже при минимальных нагрузках. Также аппроксимируется область эксплуатации с низким током, где вышеуказанная функция, относящаяся к постоянному значению Kt вращающего момента, обычно не линейная.
Экспериментальные проверки показали, что оптимальным пороговым значением является значение, позволяющее потоку намагничивания двигателя составлять приблизительно 60% от его номинального значения.
На еще одном иллюстративном этапе кондиционирования прямого тока Id, который также может быть выполнен как дополнительный этап кондиционирования, прямой ток Id, который используется для определения тока промышленной частоты, определяется по вышеприведенному уравнению для значений ниже заданного максимального предельного значения и равен такому заданному максимальному предельному значению для более высоких значений.
Другими словами, прямой ток Id имеет более высокий предел, т.е. максимально допустимое значение, за которым он больше не увеличивается и которое равно заданному пороговому значению.
Это препятствует насыщению напряжения, подаваемого на двигатель, из-за увеличения потока намагничивания. Кроме того, номинальный поток намагничивания может быть превышен, чтобы далее увеличить КПД двигателя, как только обеспечено некоторое расстояние от значения насыщения подаваемого напряжения.
Как сказано выше, управление также может осуществляться без датчиков.
Положение и частота вращения ротора определяется по генерируемой им обратной электродвижущей силе. Тем не менее, на низких частотах вращения, где двигатель испытывает потерю КПД, что упомянуто в уровне техники как недостаток, обратную электродвижущую силу нельзя использовать, поскольку ее значение сравнимо с падением напряжения из-за полного сопротивления двигателя и, следовательно, изменяется им.
В этом случае, как известно, дополнительное напряжение, обычно нулевое среднее синусоидальное, добавляют к подаваемому напряжению для выполнения желательного обнаружения. Тем не менее, даже когда такое напряжение имеет небольшие значения, оно больше не является пренебрежимо малым на низких частотах вращения по отношению к подаваемому напряжению, которое снижается, как сказано выше, для увеличения КПД двигателя. В результате, хотя такое дополнительное напряжение имеет нулевое среднее значение, оно все же индуцирует значащую дополнительную работу в двигателе и влияет на его КПД.
По этой причине настоящий способ также включает этап ввода такого дополнительного напряжения, во время которого его генерация включает переменный модуль.
В частности, амплитуда дополнительного напряжения обеспечит правильную оценку положения ротора. Экспериментальные проверки подтвердили, что дополнительное напряжение большой амплитуды желательно на низких частотах вращения, тогда как влияние амплитуды снижается на более высоких частотах вращения. Было установлено, что дополнительное напряжение большой амплитуды будет даже вредным на особенно высоких рабочих частотах вращения, причем вращающий момент выше при низких значениях. Эта характеристика объясняется тем, что дополнительное напряжение вызывает изменение потока намагничивания, хотя и с нулевым средним значением, при средних - высоких рабочих частотах вращения. В этом случае изменение напряжение добавляется к электродвижущей силе и вызывает насыщение двигателя. Величина добавляемого напряжения должна быть уменьшена и ограничена как функция рабочей частоты вращения двигателя. Ограничивающий пример показан на ФИГ.4, где ось Х указывает процент от рабочей частоты вращения двигателя от его максимальной частоты вращения, и ось Y указывает процент добавленного напряжения от наиболее подходящего значения. Оптимальный порог, за которым амплитуда дополнительного напряжения должна быть уменьшена, например, с использованием линейной функции, показанной на ФИГ.4, был экспериментально установлен на рабочей частоте вращения двигателя, соответствующей 40% от максимальной частоты вращения.
Кроме того, способ изобретения может включать этап вычисления и кондиционирования дополнительного напряжения, на котором последнее определяется как функция квадратурного тока Iq, т.е. как функция вращающего момента, который должен быть развит. В частности, модуль добавленного напряжения снижается как функция квадратурного тока, причем когда квадратурный ток имеет малые значения высокого напряжения не требуется.
Это позволяет использовать метод дополнительного напряжения для обнаружения частоты вращения и положения ротора при поддержании КПД двигателя.
Следует отметить, помимо прочего, что на низких частотах вращения дополнительное напряжение вызывает шум двигателя. Вышеописанный этап также, в основном, позволяет уменьшить такой шум.
В еще одном аспекте изобретения, поскольку метод обратной электродвижущей силы может использоваться на высоких частотах вращения, оба метода можно использовать одновременно, причем приоритет отдается результатам, получаемым из-за обратной электродвижущей силы на высоких частотах вращения, и результатам, получаемым методом дополнительного напряжения на низких частотах вращения. На промежуточных рабочих частотах вращения результаты смешанные. Следует понимать, что это позволяет далее уменьшить амплитуду дополнительного напряжения и, следовательно, потерю КПД, вызываемую ею в двигателе. Также уменьшается шум, издаваемый двигателем.
Также необходимо отметить, что дополнительное напряжение вызывает дальнейшие потери КПД, поскольку, так как инвертор модулирует такое напряжение по основному напряжению двигателя, он обязательно расходует электрическую энергию. Такое потребление является функцией частоты дополнительного напряжения, чем выше частота, тем больше потребление. Поскольку частота увеличивается для уменьшения шума, создаваемого двигателем, когда добавляется такое напряжение, любое уменьшение шума, получаемое как сказано выше, явно позволит снизить частоту дополнительного напряжения и, таким образом, потребление энергии инвертером. Другими словами, это позволит далее повысить КПД двигателя при таком управлении.
Согласно одному аспекту изобретения, частоту дополнительного напряжения также можно изменять непрерывно, этим оптимизируя КПД двигателя управлением и минимизируя восприятие вызываемого им шума.
В частности, частоту в сущности синусоидального дополнительного напряжения можно изменять, используя метод случайного или псевдослучайного вычисления.
В свете вышеизложенного, изобретение также относится к устройству для управления двигателем, которое реализует описанный выше способ.
Поэтому, устройство включает по меньшей мере один инвертор для подачи электропитания на двигатель и средства обработки, работающие на инверторе для управления подачей электропитания на двигатель.
Такие средства обработки приспособлены для вычисления подаваемого тока промышленной частоты из прямого тока Id и квадратурного тока Iq. Квадратурный ток Iq будет определен из механического вращающего момента, развиваемого двигателем, тогда как прямой ток Id будет вычисляться средствами обработки по уравнению
где kt - фаза вектора тока, который определяет постоянное значение вращающего момента двигателя.
Это устройство не будет описано более подробно во избежание повторений, причем устройство имеет такие признаки, чтобы позволить реализовать описанный выше способ.
Необходимо, кроме того, заметить, что способ изобретения предназначен для реализации посредством подходящего информационно-технологического продукта, который также подпадает под идею настоящего изобретения. В частности, информационно-технологический продукт предназначен для загрузки в память компьютера для последующего исполнения. Такой компьютер может составлять средства обработки устройства изобретения или быть их частью.
Вышеприведенное раскрытие четко доказывает, что способ и устройство изобретения по меньшей мере частично устраняют недостатки, существующие в уровне техники.
В частности, они повышают КПД двигателя даже на низких частотах вращения.
А именно, такое повышение КПД особенно заметно в случае управления без датчиков, с добавлением шума напряжения.
Способ и устройство изобретения допускают некоторое количество изменений или вариантов в рамках идеи изобретения, раскрытой в прилагаемой формуле изобретения. Все их детали могут быть заменены другими технически эквивалентными деталями, и материалы могут быть разными в зависимости от различных потребностей, но без нарушения объема изобретения.
Хотя способ и устройство были описаны с конкретными ссылками на прилагаемые чертежи, цифры, упомянутые в раскрытии и формуле изобретения, использованы только для лучшего понимания изобретения и не должны восприниматься как ограничивающие заявленный объем каким-либо образом.
Изобретение относится к области электротехники и может быть использовано в электроприводе. Технический результат - увеличение КПД на низких частотах вращения. Способ управления двигателем векторным методом включает следующие этапы: определение значения квадратурного тока Iq, необходимого для того, чтобы упомянутый двигатель создавал желательный вращающий момент; вычисление значения прямого тока Id для подачи на упомянутый двигатель по уравнению как функции вектора тока, от которого зависит постоянное значение вращающего момента двигателя; вычисление тока промышленной частоты упомянутого двигателя из прямого тока и квадратурного тока; подачу тока промышленной частоты на двигатель через инвертер. 2 н. и 10 з.п. ф-лы, 4 ил.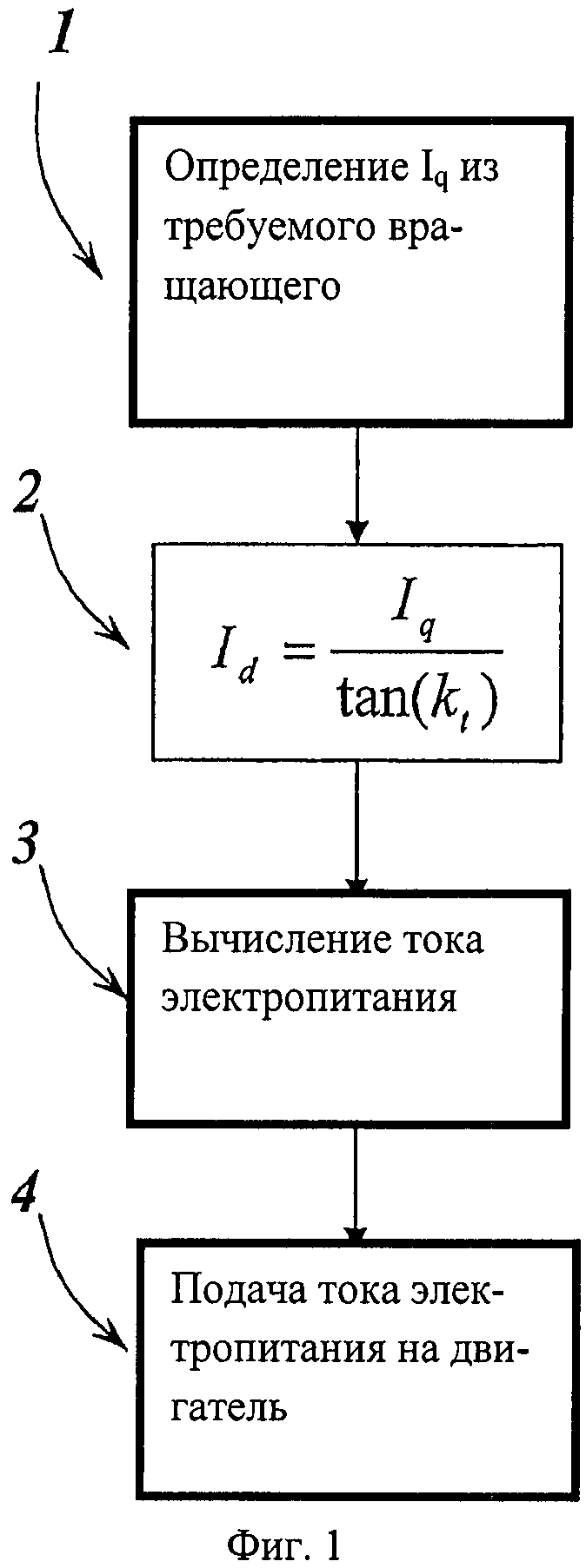
1. Способ управления двигателем инвертером и векторным методом, включающий следующие этапы:
- установление значения квадратурного тока Iq, необходимого для того, чтобы упомянутый двигатель создавал желательный вращающий момент;
- вычисление значения прямого тока Id для подачи на упомянутый двигатель по уравнению:
где kt - фаза вектора тока, от которой зависит постоянное значение вращающего момента упомянутого двигателя;
- вычисление тока промышленной частоты упомянутого двигателя посредством упомянутого прямого тока Id и упомянутого квадратурного тока Iq;
- подачу упомянутого тока промышленной частоты на упомянутый двигатель упомянутым инвертером,
отличающийся тем, что фаза вектора тока kt имеет постоянный угол, отвечающий максимальному постоянному значению Kt вращающего момента двигателя для обеспечения максимального КПД двигателя при его эксплуатации.
2. Способ по п. 1, отличающийся тем, что он включает этап определения максимального постоянного значения Kt двигателя, связанного с углом фазы вектора тока kt.
3. Способ по п. 2, отличающийся тем, что двигателем является синхронный реактивный двигатель, причем на этапе определения максимального постоянного значения Kt двигателя аппроксимируют по существу линейной функцией данные по определению квадратурного тока Iq и прямого тока Id.
4. Способ по п. 1, отличающийся тем, что он включает этап определения упомянутого постоянного значения вращающего момента перед упомянутым этапом определения упомянутого квадратурного тока Iq.
5. Способ по любому из предшествующих пунктов, отличающийся тем, что он включает этап кондиционирования упомянутого прямого тока Id, причем значение упомянутого прямого тока Id ограничено в его нижних значениях заданным пороговым значением.
6. Способ по любому из пп. 1-4, отличающийся тем, что он включает этап кондиционирования упомянутого прямого тока Id, причем значение упомянутого прямого тока Id ограничено вверху заданным максимальным значением.
7. Способ по п. 6, отличающийся тем, что он включает этап установления частоты вращения и положения ротора упомянутого двигателя без датчиков положения и частоты вращения.
8. Способ по п. 7, отличающийся тем, что упомянутый этап установления частоты вращения и положения упомянутого ротора включает сумму дополнительного, в сущности синусоидального, напряжения электропитания к упомянутому напряжению электропитания упомянутого двигателя.
9. Способ по п. 8, отличающийся тем, что упомянутое дополнительное напряжение электропитания имеете модуль, изменяющийся с нагрузкой упомянутого двигателя.
10. Способ по п. 8 или 9, отличающийся тем, что упомянутое дополнительное напряжение электропитания имеет модуль, изменяющийся с частотой вращения упомянутого ротора и/или с вращающим моментом, который необходим упомянутому двигателю при его нагрузке.
11. Способ по п. 8 или 9, отличающийся тем, что упомянутое дополнительное напряжение электропитания имеет модуль, изменяющийся с вращающим моментом, который необходим упомянутому двигателю при его нагрузке, и с переменной частотой, установленной методом случайного или псевдослучайного вычисления.
12. Устройство для управления двигателем, включающее по меньшей мере один инвертер для подачи электропитания на упомянутый двигатель и средства обработки, работающие на упомянутом инвертере, для управления подачей тока промышленной частоты на упомянутый двигатель, причем упомянутые средства обработки способны вычислять упомянутый ток промышленной частоты по прямому току Id и квадратурному току Iq, причем упомянутый квадратурный ток Iq установлен по постоянному значению вращающего момента, который должен развивать упомянутый двигатель, и причем упомянутый прямой ток Id вычисляется упомянутыми средствами обработки по уравнению
где kt - фаза вектора тока, от которой зависит постоянное значение вращающего момента упомянутого двигателя,
отличающееся тем, что фаза вектора тока kt имеет постоянный угол, отвечающий максимальному постоянному значению Kt вращающего момента двигателя для обеспечения максимального КПД двигателя при его эксплуатации.
| СПОСОБ ДЛЯ ДЕКОДИРОВАНИЯ БИТОВОГО ПОТОКА ВИДЕО | 2021 |
|
RU2825853C2 |
| СПОСОБ ДЛЯ ДЕКОДИРОВАНИЯ БИТОВОГО ПОТОКА ВИДЕО | 2021 |
|
RU2825853C2 |
| УСТРОЙСТВО ДЛЯ РАЗДЕЛЕНИЯ СЫПУЧИХ МАТЕРИАЛОВ | 1991 |
|
RU2012425C1 |
| RU 2132110C1, 20.06.1999 | |||
| US 20090102402 23.04.2009 | |||
| JP 2004282873 A, 07.10.2004 | |||

