Область техники
Изобретение относится к области машиностроения и касается механизмов передачи вращательного движения (редукторов, вариаторов), способных изменять передаточное соотношение.
Предшествующий уровень техники
Известны устройства передачи вращательного движения [1] (редукторы многоступенчатые регулируемые), выполненные в виде ступенчатых механических коробок перемены передач (КПП), где изменение передаточного соотношения происходит с разрывом потока мощности путем перераспределения усилий между разными парами шестерен за счет осевого передвижения кулачковых или шлицевых муфт.
Недостатками таких устройств является низкая надежность и долговечность, обусловленная небольшим ресурсом работы этих муфт, а также недостаточно большая мощность, которую способно передать устройство, что обусловлено недостаточной прочностью муфт, и этот недостаток в особенности сказывается именно в процессе изменения передаточного соотношения (процессе переключения передач).
Наиболее близким к предлагаемому изобретению является устройство передачи вращательного движения, известное как импульсивный вариатор [2]. Здесь вращательное движение на жестко соединенную с ведомым валом центральную шестерню передается через сателлиты и через механизмы свободного хода, которые работают в режиме принудительных колебаний кручения, при этом изменение амплитуды таких колебаний позволяет изменять передаточное соотношение.
Недостатки прототипа следующие:
Импульсивный вариатор имеет небольшую надежность и долговечность, поскольку в процессе передачи усилий в режиме принудительных колебаний постоянно возникают импульсные перегрузки в механизмах свободного хода и шестернях, что ограничивает ресурс их работы. Кроме того, мощность, передаваемая таким вариатором, является ограниченной, поскольку для увеличения мощности необходимо увеличивать обороты ведомого вала путем увеличения амплитуды колебаний, из-за чего импульсные перегрузки только увеличиваются, вследствие чего ускоряется разрушение механизмов свободного хода и зубьев шестерен в местах контакта, при этом неизбежно возрастают энергозатраты, приводящие к уменьшению КПД импульсивного вариатора.
Раскрытие изобретения
Таким образом, задачей настоящего изобретения является создание механизма передачи вращательного движения, в котором бы отсутствовали указанные выше недостатки.
Техническим результатом является повышение надежности и долговечности механизма передачи вращательного движения, увеличение КПД механизма.
Указанный технический результат достигается с помощью механизма передачи вращательного движения, который содержит корпус, в котором установлены с возможностью вращения эксцентриковый ведущий вал и ведомый вал, установленное на эксцентриковом ведущем валу с возможностью вращения промежуточное звено, при этом механизм содержит механизмы свободного хода с входными и выходными звеньями, центральную шестерню и находящиеся с ней в зацеплении сателлиты, причем центральная шестерня жестко соединена с промежуточным звеном, а входное звено каждого механизма свободного хода соединено с соответствующим сателлитом, а выходное звено каждого механизма свободного хода кинематически соединено с шарниром, установленным на корпусе механизма, причем вращательное движение на выходной вал передается посредством кинематической связи с промежуточным звеном.
Предпочтительные варианты и усовершенствования механизма передачи вращательного движения в соответствии с настоящим изобретением приведены в зависимых пунктах формулы изобретения.
В соответствии с другими вариантами настоящего изобретения на промежуточном звене расположены кольцевидные пазы, с которыми взаимодействуют дугообразные направляющие, соединенные с корпусами сателлитов.
В соответствии с вариантами изобретения механизм дополнительно содержит эксцентриковый механизм управления, установленный на ведущем валу. При этом эксцентриковый механизм управления включает шарнирную тягу управления и ползун управления.
В соответствии с другими вариантами настоящего изобретения каждый сателлит установлен в корпусе, который кинематически соединяет выходное звено каждого механизма свободного хода с шарниром, установленным на корпусе механизма. Упомянутая кинематическая связь может быть выполнена в виде тяги.
В соответствии со следующим предпочтительным вариантом настоящего изобретения кинематическая связь промежуточного звена с выходным валом выполнена в виде карданного вала.
В соответствии с еще одним вариантом настоящего изобретения расстояние между осью вращения промежуточного звена и центром шарнира, установленного на корпусе механизма, (RП) является меньшим, чем радиус делительной окружности центральной шестерни (RС), а между величинами RП и RС должно быть соблюдено следующее соотношение: 0,2·RС<RП<RС.
Краткое описание чертежей
Настоящее изобретение поясняется чертежами, где:
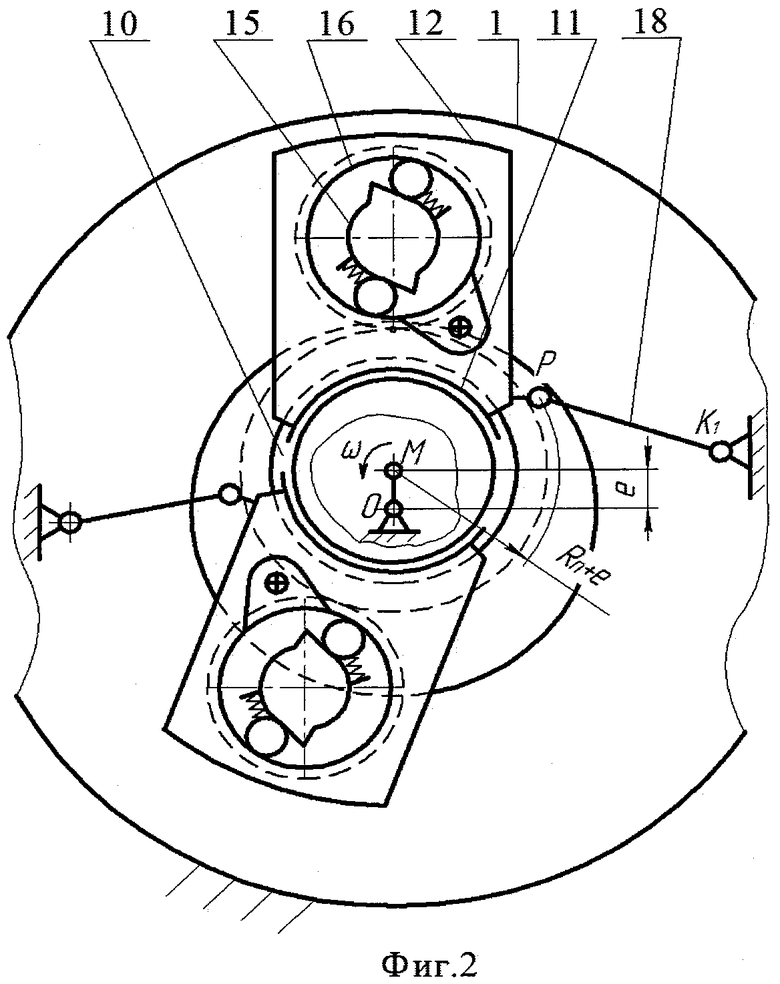
на фиг.1, 2 показана кинематическая схема механизма передачи вращательного движения;
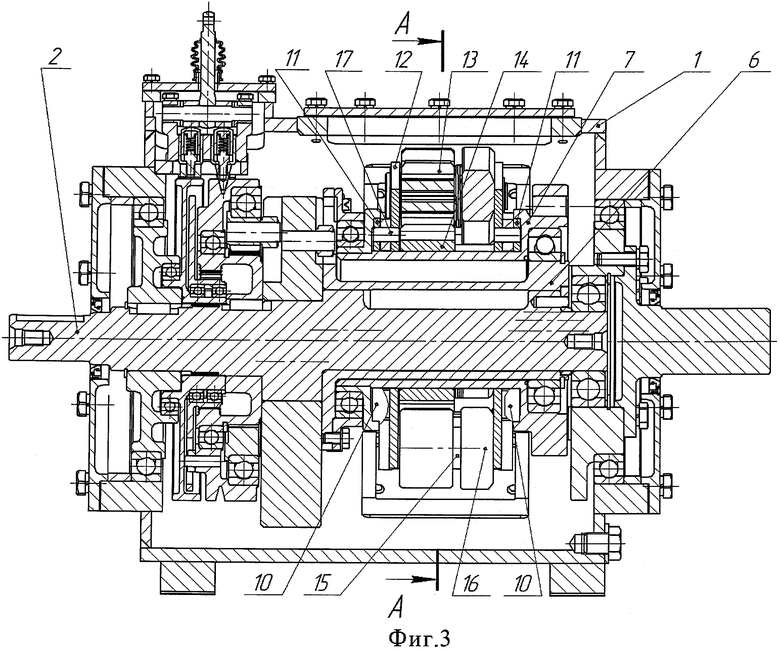
на фиг.3 показан общий вид механизма;
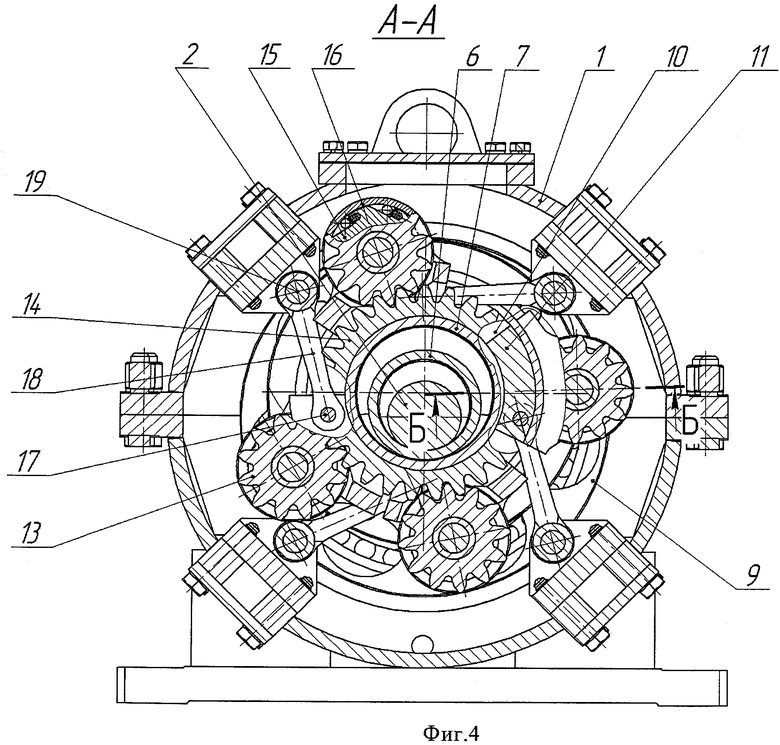
на фиг.4 показан разрез А-А на фиг.3;
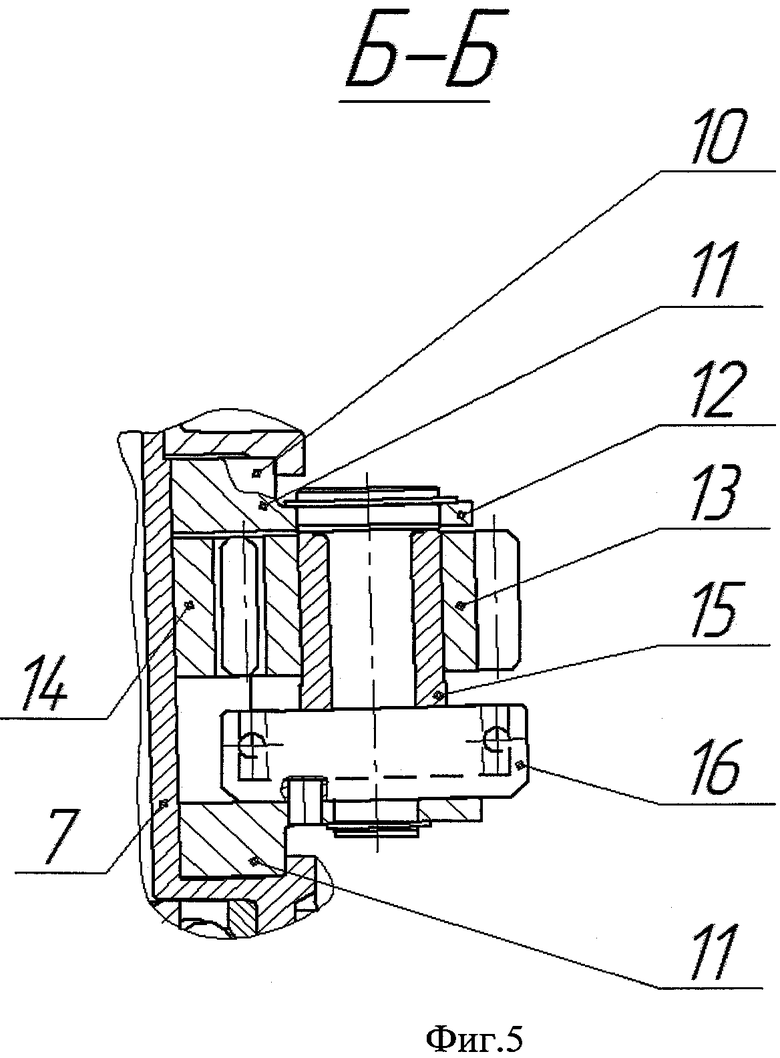
на фиг.5 показан разрез Б-Б на фиг.3.
Лучший вариант осуществления изобретения
Механизм передачи вращательного движения (см. фиг.1, 2, 3, 4) включает в себя неподвижный корпус 1, в котором с возможностью вращения установлен эксцентриковый ведущий вал 2, на котором расположен ползун управления 3, соединенный шарнирной тягой управления 4 с ползуном эксцентрикового механизма 5. На эксцентриковом ведущем валу 2 установлено с возможностью вращения промежуточное звено 7, соединенное с помощью карданного вала 8 с ведомым валом 9. На промежуточном звене расположены кольцевидные пазы 10, с которыми взаимодействуют дугообразные ползуны 11, соединенные с корпусами сателлитов 12, при этом с каждым корпусом сателлита соединены два дугообразных ползуна. В каждом корпусе сателлита установлен с возможностью проворачивания сателлит 13, который находится в сцеплении с центральной шестерней 14, жестко соединенной с промежуточным звеном. С каждым сателлитом соединено входное звено механизма свободного хода 15, при этом выходное звено механизма свободного хода 16 соединено с корпусом сателлита 12, на каждом корпусе сателлита расположен шарнир 17, соединенный с помощью шарнирной тяги 18 с одним из корпусных шарниров 19, каждый из которых жестко соединен с корпусом 1.
В дальнейшем будет подробно описана работа механизма, при этом стоит отметить, что кинематическая связь выходного звена механизма свободного хода с шарниром, установленным на корпусе механизма, будет показана на примере, в котором указанная кимематическая связь состоит из корпуса сателлита, в котором расположены сателлит и механизм свободного хода, и тяги, соединяющей корпус сателлита с шарниром, установленным на корпусе механизма. Кинематическое соединение промежуточного вала с выходным валом будет показано на примере карданного вала. Указанные выше примеры не являются единственными для выполнения, и, таким образом, кинематические связи могут включать любые другие элементы.
Механизм работает следующим образом.
Эксцентриковый ведущий вал 2, оборачиваясь против часовой стрелки с угловой скоростью ω, передает вращательное движение на промежуточное звено 7, при этом расположенная на оси этого звена точка М описывает окружность радиуса е вокруг расположенной на оси эксцентрикового ведущего вала точки О. Величину е, которая является расстоянием между осями вращения эксцентрикового ведущего вала 2 и промежуточного звена 7, назовем эксцентриситетом механизма. Величину е можно изменять путем осевого передвижения ползуна управления 3 эксцентрикового механизма управления 5. Расстояние между точкой М и шарнирами 19, установленными на корпусе механизма, постоянно изменяется. Пусть в данный момент ближе всего к точке М расположился корпусной шарнир K1, соединенный шарнирной тягой 18 с расположенным на корпусе сателлита 12 шарниром 17, центр которого находится в точке Р. Поскольку промежуточное звено 7 пытается вместе с точкой М и центральной шестерней 14 продвинуться влево, оно тянет за собою корпус сателлита 12, расположенный над точкой М, из-за чего шарнирная тяга 18 [PK1] испытывает усилие растяжения, при этом вследствие взаимодействия расположенной в этом корпусе 12 сателлитной шестерни 13 с центральной шестерней 14 входное звено механизма свободного хода 15, расположенного в этом корпусе сателлита 12, начинает взаимодействовать с выходным звеном 16 и блокируется, из-за чего мгновенный центр скоростей промежуточного звена оказывается в точке Р, при этом взаимное движение сателлита 13, расположенного на луче [ОМ], и центральной шестерни 14 одномоментно прекращается, взаимного обкатывания зубьев в этой паре шестерен не происходит. На короткий промежуток времени корпус сателлита 12 вместе с заблокированным механизмом свободного хода 15 и 16, сателлитом 13, центральной шестерней 14 и промежуточным звеном 7 образуют в совокупности одномоментное единое звено, расстояния между любыми двумя точками которого в течение указанного промежутка времени остаются постоянными. При этом вращение центральной шестерни 14 вместе с остальными элементами указанного звена относительно корпуса 1 осуществляется с учетом проворачивания шарниров 17 и 19 шарнирной тяги 18 [PK1]. Остальные корпусы сателлитов 12 могут свободно оборачиваться относительно промежуточного звена 7 против часовой стрелки, не вызывая заблокирования соответствующих механизмов свободного хода, при этом соответствующие шарнирные тяги 18 будут испытывать усилия сжатия.
По мере дальнейшего проворачивания ведомого вала вокруг точки О (на Фиг.2-4 соответствует проворачиванию луча [ОМ]) ближе всего к точке М окажется корпусной шарнир 19, связанный шарнирной тягой 18 с ближайшим (по направлению движения точки М) корпусом сателлита 12, и теперь уже на этом корпусе сателлита 12 произойдет одномоментное блокирование механизма свободного хода 15 и 16, после чего механизм свободного хода корпуса сателлита, связанного с шарнирной тягой 18 [PK1], разблокируется. Чем больше количество корпусов сателлитов 12, тем равномернее будет работать механизм, поскольку равномерность обусловлена процессами блокирования и разблокирования механизмов свободного хода 15 и 16 корпусов сателлитов 12, при этом в любой момент времени одномоментно заблокирован только один механизм свободного хода, а все остальные механизмы свободного хода являются разблокированными, позволяя соответствующим корпусам сателлитов 12 проворачиваться относительно центральной шестерни 14 по часовой стрелке. Процессы блокирования и разблокирования механизмов свободного хода полностью обусловлены пространственным расположением точки М, которое изменяется при проворачивании эксцентрикового ведущего вала 2. Вращательное движение промежуточного звена 7 передается с помощью карданного вала 8 на ведомый вал 9. При этом передача вращательного движения на ведомый вал 9 может осуществляться также с помощью шарниров равных угловых скоростей, кулисного механизма.
Таким образом, вращательное движение промежуточного звена 7 вместе с центральной шестерней 14 полностью соответствует вращательному движению круга радиуса RП, где Р - центр шарнира, установленного на корпусе механизма, с центром в точке М, который обкатывается без скольжения в середине неподвижной окружности радиуса (RП+e) с центром в точке О, при этом мгновенный центр скоростей промежуточного звена 7 каждый раз будет располагаться в шарнире 17 именно того корпуса сателлита 12, который будет находиться на луче [ОМ]. Если обозначить соотношение (RП/RС) как kp (то есть kp=RП/RС), где kp является коэффициентом редукции, a RС - радиус делительной окружности центральной шестерни, то передаточное соотношение i предлагаемого редуктора будет таким: i=(RС·kp+e)/e. Указанное передаточное отношение выведено заявителем после экспериментальных исследований.
Видим, что фактически полюс зацепления предлагаемого механизма будет находиться не в полюсе зацепления центральной шестерни 14 с сателлитом 13, который расположен на расстоянии RС от точки О, а намного ближе к точке О, то есть в точке Р, которая находится на расстоянии RП от точки О.
Как уже отмечалась, передача усилий в предлагаемом механизме происходит через одномоментно заблокированный механизм свободного хода и при полном отсутствии взаимной обкатки зубьев центральной шестерни 14 и нагруженного сателлита 13, что уменьшает энергозатраты и минимизирует нагрузку основных передающих элементов механизма, вследствие чего увеличивается КПД предлагаемого механизма и повышается его надежность и долговечность.
Источники информации
1. Харитонов С.А. Автоматические коробки передач. Г.: Астрель - ACT, 2003, 479 с.
2. Мальцев В.Ф. Импульсивные вариаторы. М.: Машгиз, 1963, 278 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЕРЦИОННЫЙ АВТОМАТИЧЕСКИЙ ИМПУЛЬСИВНЫЙ ВАРИАТОР | 2002 |
|
RU2212575C1 |
| Импульсный планетарный вариатор | 1980 |
|
SU932024A1 |
| Импульсный вариатор скорости | 1975 |
|
SU540091A1 |
| ИМПУЛЬСИВНЫЙ ВАРИАТОР СКОРОСТИ | 1971 |
|
SU320658A1 |
| Двухпоточная бесступенчатая коробка передач | 1981 |
|
SU1229483A1 |
| Регулируемая передача | 1980 |
|
SU875140A1 |
| ИМПУЛЬСИВНЫЙ ВАРИАТОР | 1967 |
|
SU200992A1 |
| Импульсный вариатор скорости | 1981 |
|
SU954677A1 |
| РЫЧАЖНЫЙ ВАРИАТОР | 2011 |
|
RU2467227C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ ПОРШНЕЙ В ЦИЛИНДРАХ ПОРШНЕВОГО РОТОРА ВО ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ РОТОРА И ПЕРЕДАТОЧНЫЙ МЕХАНИЗМ | 2012 |
|
RU2518136C2 |
Изобретение относится к области машиностроения, в частности к механизмам передачи вращательного движения. Механизм передачи вращательного движения содержит корпус, в котором установлены с возможностью вращения эксцентриковый ведущий вал, ведомый вал и промежуточное звено, расположенное на ведущем валу. В корпусе механизма расположены центральная шестерня с сателлитами и механизмы свободного хода с входными и выходными звеньями. Центральная шестерня жестко соединена с промежуточным звеном. Входное звено каждого механизма свободного хода соединено с соответствующим сателлитом, а выходное звено каждого механизма свободного хода кинематически соединено с шарниром, установленным на корпусе механизма. Вращательное движение на выходной вал передается посредством кинематической связи с промежуточным звеном. Техническим результатом является повышение надежности и долговечности механизма передачи вращательного движения, увеличение КПД механизма. 7 з.п. ф-лы, 5 ил.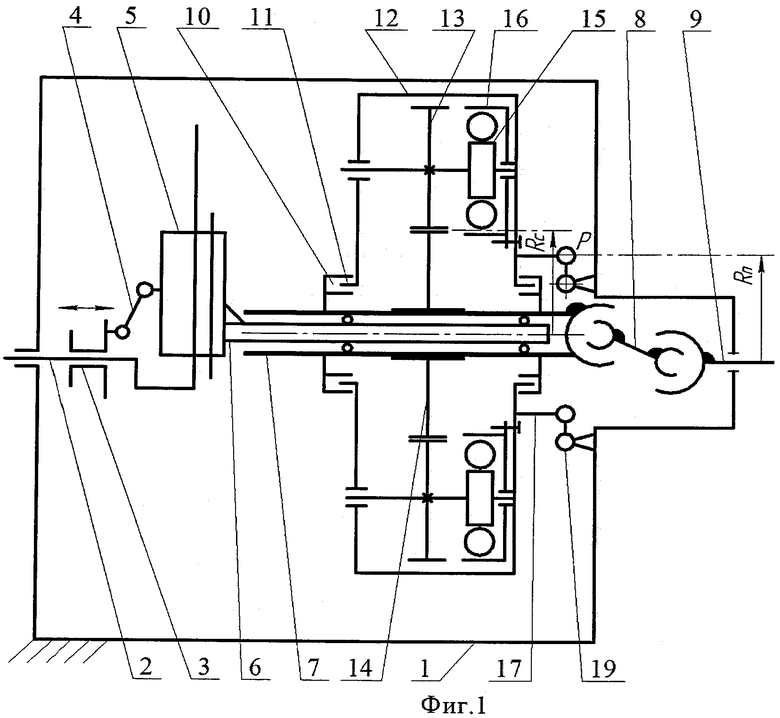
1. Механизм передачи вращательного движения, содержащий корпус, в котором установлены с возможностью вращения эксцентриковый ведущий вал и ведомый вал, установленное на эксцентриковом ведущем валу с возможностью вращения промежуточное звено, при этом механизм содержит механизмы свободного хода с входными и выходными звеньями, центральную шестерню и находящиеся с ней в зацеплении сателлиты, отличающийся тем, что центральная шестерня жестко соединена с промежуточным звеном, входное звено каждого механизма свободного хода соединено с соответствующим сателлитом, а выходное звено каждого механизма свободного хода кинематически соединено с шарниром, установленным на корпусе механизма, причем вращательное движение на выходной вал передается посредством кинематической связи с промежуточным звеном.
2. Механизм передачи вращательного движения по п.1, отличающийся тем, что дополнительно содержит эксцентриковый механизм управления, установленный на ведущем валу.
3. Механизм передачи вращательного движения по п.2, отличающийся тем, что эксцентриковый механизм управления включает шарнирную тягу и ползун управления.
4. Механизм передачи вращательного движения по п.1, отличающийся тем, что выходное звено каждого механизма свободного хода посредством корпуса сателлита соединяется кинематически с шарниром, установленным на корпусе.
5. Механизм передачи вращательного движения по п.4, отличающийся тем, что кинематическая связь корпуса сателлита с шарниром, установленным на корпусе механизма, выполнена в виде тяги.
6. Механизм передачи вращательного движения по п.4, отличающийся тем, что на промежуточном звене расположены кольцевидные пазы, с которыми взаимодействуют дугообразные направляющие, соединенные с корпусами сателлитов.
7. Механизм передачи вращательного движения по п.1, отличающийся тем, что кинематическая связь промежуточного вала с выходным валом выполнена в виде карданного вала, либо в виде шарниров равных угловых скоростей, либо в виде кулисного механизма.
8. Механизм передачи вращательного движения по п.1, отличающийся тем, что расстояние между осью вращения промежуточного звена и центром шарнира, установленным на корпусе механизма (RП), является меньшим, чем радиус делительной окружности центральной шестерни (RС), а между величинами RП и RС должно быть соблюдено следующее соотношение: 0,2·RС<RП<RС.
| UA 200912568 а, 26.04.2010 | |||
| Импульсный вариатор | 1986 |
|
SU1355813A1 |
| Механическая импульсная регулируемая передача | 1982 |
|
SU1104331A1 |
| ИМПУЛЬСИВНЫЙ ВАРИАТОР | 0 |
|
SU204859A1 |
| ИМПУЛЬСНЫЙ ВАРИАТОР | 1992 |
|
RU2044941C1 |

