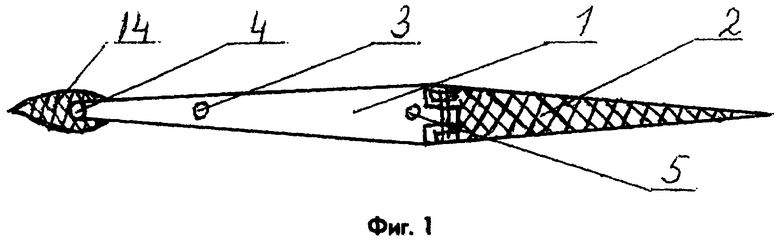
Изобретение относится к судостроению и касается создания махово-реактивных движителей надводных и подводных кораблей. В махово-реактивном движителе совмещены два способа перемещения в воде. Это способ по подобию рыб и способ по подобию кальмаров. Для этого применена особая конструкция подвижного органа, состоящего из двух частей, в дальнейшем ротор, фиг.1, причем передняя часть 1 выполнена из твердого материала, а задняя часть 2 из упругого и гибкого материала, например, из резины или других полимеров. Соединены эти две части друг с другом болтами впотай или другим способом. На передней, жесткой части ротора 1 предусмотрены места для крепления тросов, в дальнейшем растяжек, в точках 4 и 5, а так же приводных тяг 12 фиг.8 в точке 3, находящейся в 1/3 длины от передней жесткой части ротора. Таких тяг необходимо две по краям ротора во избежание перекоса во время работы. На передней части ротора предусмотрен амортизатор стреловидной формы 14. Ротор помещен в камеру коробчатого сечения фиг.2, причем камера может быть расширена в средней ее части фиг.13 на толщину ротора. Камера жестко крепится к днищу корабля так, чтобы между днищем и камерой оставался необходимый зазор для эффективной работы клапана 8 фиг.3. Рычаги 15 и 16 фиг.6 так же жестко крепятся к днищу корабля. Между рычагами 15, 16 и жесткой частью ротора в токах 4, 5 находятся тросовые растяжки 6, 7 фиг.6.
Сущность изобретения заключается в том, что ротор особой конструкции, расположенный в камере прямоугольного сечения фиг.2, или в камере с расширенной ее средней частью, для увеличения производительности фиг.13, совершает движения по эксцентричной траектории. Выталкивание воды из передней части камеры в заднюю ее часть происходит следующем образом:
Фиг.2: Ротор в исходном положении. Начало движения вниз. В этом положении растяжки 6 и 7 находятся в натянутом состоянии - подробнее смотри на фиг.6. Камеру схематично разделим на четыре сектора для полноты описания движения ротора по линиям А-А1 и Б-Б1.
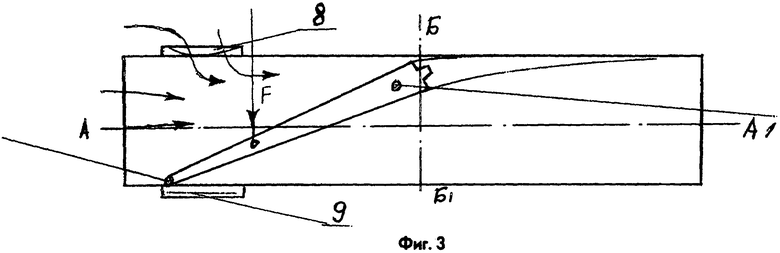
Фиг.3: В начале движения вниз ротору нужно преодолеть силу отрыва от верхней части камеры. Для чего предусмотрен пластинчатый клапан одностороннего действия 8. В начале движения он открывается под действием вакуума, и вода начинает поступать через него в сектор А-О-Б, а затем и из передней части камеры и заполняет сектор А-О-Б. Клапан 9 в это время закрыт. Сила F от привода действует на переднюю часть ротора, поэтому передний конец ротора достигает нижней стенки камеры быстрее, чем задняя часть ротора. В этот момент амортизатор 14 касается стенки. В это же время перекрывается сектор А-О-Б1 передней частью ротора, и вода под дальнейшим действием силы F начинает выталкиваться в сектор Б1-О-А1 камеры. Для более уверенной работы ротора в таком режиме возможно утяжеление ротора в точке 5 фиг.1.
Фиг.4: Конец движения вниз. Жесткая, передняя часть ротора прижата силой F к нижней стенки камеры. В этот момент вся вода из сектора А-О-Б1 переместилась в сектор Б1-О-А1. Причем гибкая, упругая задняя часть ротора перекрывает сектор Б-О-А1 и противодействует воде попасть из сектора Б1-О-А1 в сектор А-О-Б, а затем под действием сил собственной упругости продолжает выталкивать воду из сектора Б1-О-А1 за пределы камеры в заднюю ее часть.
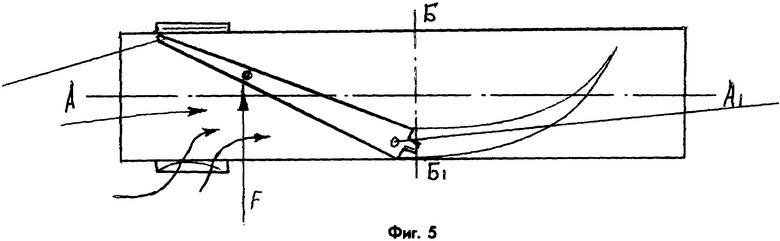
Фиг.5: Сила F меняет свое действие на противоположное. Цикл начинает повторяться в противоположном направлении, то есть открывается пластинчатый клапан 9 и т.д.
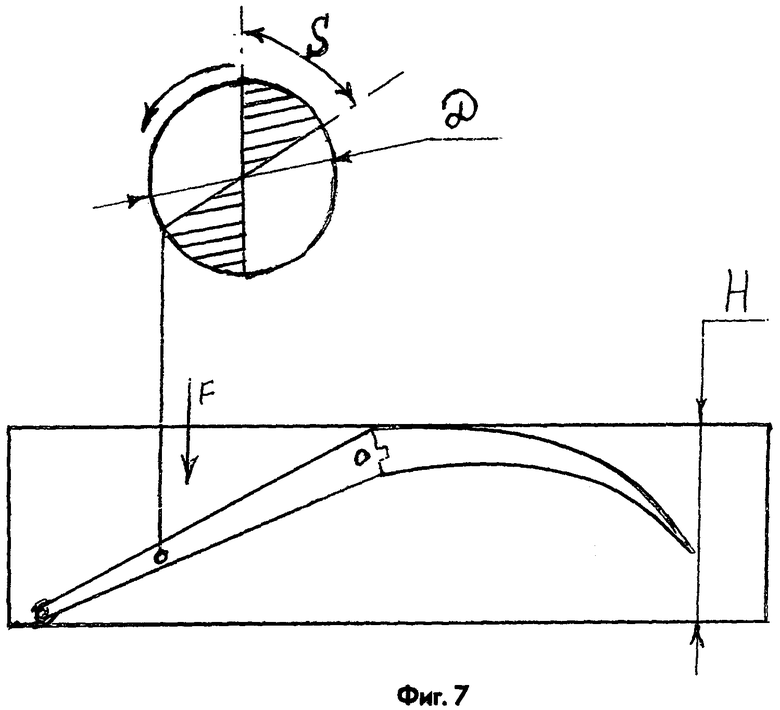
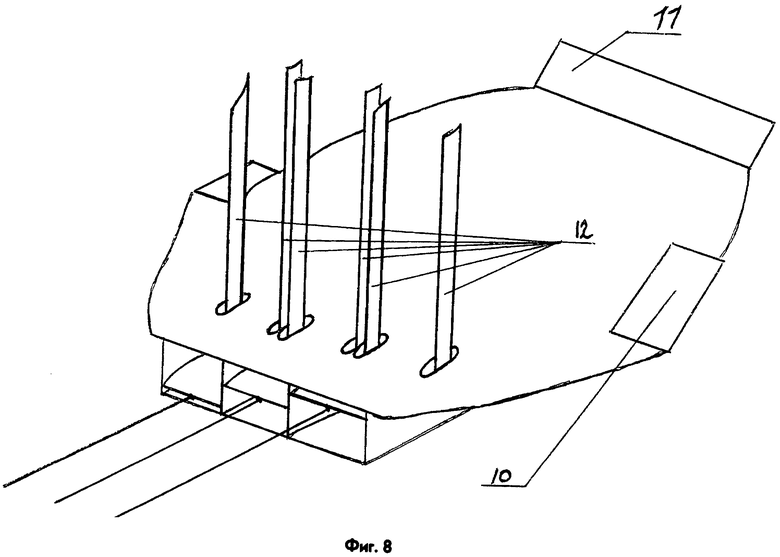
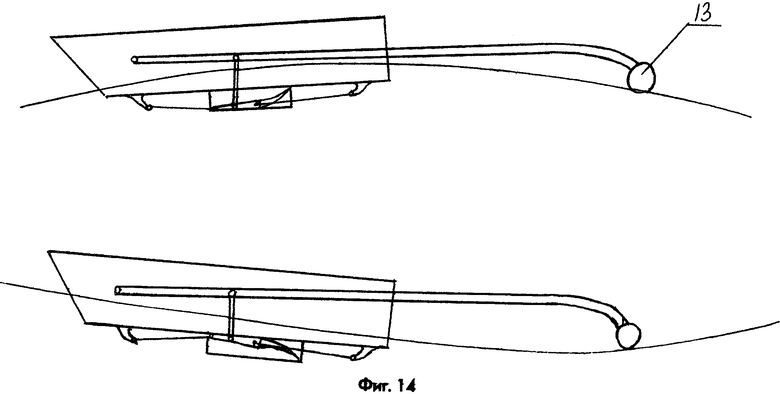
Растяжки 6 и 7 должны быть достаточно длинными для того, чтобы угол L был минимальный, фиг.6, это обеспечит достаточно стабильное положение ротора в рабочей зоне. Передняя растяжка 6 удерживает ротор в рабочей зоне при холостом ходе судна, а на заднюю растяжку 7 передается часть реактивной силы от работы ротора. Передавать движение ротору можно от разных приводов: от механического, от гидравлического, а так же можно использовать энергию волн, оснастив суда поплавковой системой 13, фиг.14. Рассмотрим привод от кругового движения, фиг.7. Здесь обязательное условие, что Д равно Н, фиг.7, то есть диаметр кругового привода равен высоте камеры Н. Как видно на фиг.7, сектор S круга особенно нагружен, так как в этот момент происходит выталкивание воды из камеры. Этот сектор примерно равен 60 градусам, поэтому целесообразно одновременно использовать, как минимум, три таких камеры на одной оси привода, и таким образом распределить силу F равномерно по всей длине круга, как показано на фиг.8.
Махово-реактивный движитель щука можно располагать под днищем корабля в горизонтальном расположении, фиг.9. Внутри корпуса корабля, что предпочтительно для кораблей, работающих на мелководье или ледоколов, винты которых подвержены деформации об лед, фиг.10. Можно эксплуатировать и в вертикальном расположении, допустим, на подводных лодках, фиг.11. А еще можно разместить движитель на отдельной платформе, это позволит подводную часть использовать как отдельный агрегат, действующий по законам аэродинамики, используя рули поворота 10 и рули глубины 11, фиг.12. Надводная часть судна, при достаточной скорости, поднимется над водой и позволит всей конструкции двигаться без затруднений при достаточно большом волнении воды.
Махово-реактивный движитель щука не создает турбулентности, так как два потока воды, разделенных ротором в процессе работы, складываются в один ламинарный посредством задней, упругой части ротора, поэтому движитель бесшумен, что необходимо при эксплуатации подводных лодок.
Махово-реактивный движитель щука предположительно будет иметь больший КПД, чем винтовой движитель, так как не разбрасывает воду в стороны, а всю поступившую в камеру воду выбрасывает назад.
Махово-реактивный движитель щука объясняет теорию полета майского жука, у которого между брюшком и роговым крылом создается похожая реактивная сила.
К недостаткам движителя можно отнести сложность организации движения судна назад, но, применив современные подруливающие средства, этот недостаток можно свести к минимуму. Или же, учитывая простоту конструкции движителя, иметь такой же встречного направления, который в режиме основного движения будет закрыт.
Известен водометный движитель SU 1466986 A1 B63H 1/02, содержащий пластину, размещенную в камере прямоугольного сечения, открытой с торцов. Пластина в первой трети связана с тягой. К пластине шарнирно прикреплен закрылок. Кроме того, имеется специальный механизм реверсивного кода, снабженный подпружининными защелками, установленными на боковых стенках камеры со стороны носовой и кормовой кромок пластины и поочередно взаимодействующими с ними. Этот движитель имеет невысокие эксплуатационные характеристики из-за неопределенности режима работы движителя на начальном этапе работы и зависит от скорости набегающего потока. Пассивная роль закрылка только мешает ламинарности движения воды, а в случае заброса воды в переднюю часть камеры может расклиниться между верхней или нижней стенкой. Реверс возможен только при значительном усложнении конструкции. Пружины и защелки только уменьшают герметичность камеры и сводят к минимуму реактивную силу.
В качестве ближайшего аналога запатентован другой движитель RU 2122505 A от 27.11.98 B63H 1/36, а также RU 2152332 C1 от 20.05.99, содержащий прикрепленную к корпусу судна камеру прямоугольного сечения с открытыми торцами и расположенную в ней пластину, один конец которой шарнирно прикреплен к тяге, с возможностью качения в камере в плоскости ортогональной пластины и полного прилегания к противоположным пластинам камеры, а другой конец пластины - вне камеры, и сама камера шарнирно присоединена к корпусу, либо к несущей поверхности транспортного средства, с возможностью передачи камере качательных движений. Камера движителя может быть разбита на несколько камер меньшей высоты, в каждой из камер которых находится пластина, соединенная с тягой. Этот движитель имеет серьезные недостатки: 1. При перемещении жесткой пластины поперек потока на ее краях образуется вихревая закрутка потока. При большой длине пластин они будут прогибаться под упругостью воды, что значительно уменьшит реактивную составляющую и снизит КПД из-за уменьшения массы отбрасываемой им рабочей среды. 2. Около поворотной камеры, при ее крайних значениях углов поворота, будет создаваться вихревая закрутка потока, что вызывает нестационарность обтекания, срыв потока. Между камерой и корпусом судна образуется застойная зона, заполненная вихрями, в результате чего резко возрастает лобовое сопротивление. Все эти недостатки могут говорить о малой эффективности такого движителя.
Предлагаемый махово-реактивный движитель щука не имеет всех этих недостатков, т.к. ротор имеет особую конструкцию и передней жесткой частью совершает только полезную работу, выталкивая из камеры воду. Задняя гибкая и упругая часть ротора тоже совершает полезную работу. В конце движения по выталкиванию воды передней частью ротора она перекрывает заднюю зону и препятствует попаданию воды в переднюю зону, а в дальнейшей под действием сил собственной упругости продолжает выталкивать воду из камеры. Также необходима роль задней части ротора для того, чтобы из двух разделенных ротором потоков соединить в один ламинарный, после прохождения воды через рабочую зону ротора, и это полностью исключает турбулентность, поэтому движитель не создает шума. Не маловажную роль выполняет амортизатор, предотвращая стук в момент касания ротора стенки камеры. Камера прямоугольного сечения или расширенная в средней ее части для увеличения производительности не создает сколь-нибудь значимого сопротивления. Камера снабжена в верхней и нижней стенках клапанами одностороннего действия - для избегания больших усилий в момент отрыва ротора от нижней и верхней стенок. Для удержания ротора в рабочей зоне имеются тросовые растяжки, причем на заднюю растяжку передается часть реактивной силы от ротора. Натяжением или ослаблением растяжек можно регулировать эффективность работы ротора. Расположение движителя на судах может быть как горизонтальным, так и вертикальным, в зависимости от назначения. Ротор в работу может приводиться любым приводом: и механическим, и гидравлическим, а также можно использовать энергию волн фиг.14, применив поплавковое устройство 13. Можно использовать комбинированный привод при заходе в порт эксплуатировать корабельные энергоустановки, а в открытом море пользоваться энергией волн, что приведет к большой экономии горючего.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТОЛЧКОВО-РЕАКТИВНЫЙ ДВИЖИТЕЛЬ "ЗМЕЯ" | 2010 |
|
RU2498925C2 |
| Активный скуловой стабилизатор качки судна | 2019 |
|
RU2749820C2 |
| СПОСОБ ОБРАЗОВАНИЯ МАХОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ В ВИДЕ МАШУЩЕГО ВИНТА | 2010 |
|
RU2482010C2 |
| МНОГОРАЗОВАЯ ВОЗДУШНО-КОСМИЧЕСКАЯ СИСТЕМА | 1999 |
|
RU2164882C1 |
| ЭКРАНОДОРОЖНЫЙ ТРАНСПОРТ КАШЕВАРОВА "ЭДТК" | 1996 |
|
RU2103192C1 |
| ГИДРОЛЕТ КАШЕВАРОВА | 1993 |
|
RU2097228C1 |
| МОРСКОЙ ЭКРАНОЛЕТ КАШЕВАРОВА "МЭК" | 1993 |
|
RU2083440C1 |
| ПЛАВНИКОВЫЙ ЛОПАСТНОЙ ДВИЖИТЕЛЬ ДЛЯ ПЛАВСРЕДСТВ НАДВОДНОГО И ПОДВОДНОГО ПЛАВАНИЯ (ВАРИАНТЫ) | 2016 |
|
RU2622519C1 |
| КОРАБЛЬ С ПЛАВНИКОВЫМ ДВИЖИТЕЛЕМ | 2007 |
|
RU2360831C2 |
| КОЛЕБЛЮЩИЙСЯ ДВИЖИТЕЛЬ | 2014 |
|
RU2631742C1 |







Изобретение относится к области судостроения. Махово-реактивный движитель содержит подвижный орган, тросовые растяжки, камеру и пластинчатые клапаны одностороннего действия. Подвижный орган помещен в камеру и удерживается в рабочем положении тросовыми растяжками. Усилия от работы подвижного органа по тросовым растяжкам передаются на движимое судно. Камера выполнена коробчатого сечения или с расширенной средней частью. Подвижный орган совершает в камере эксцентрические возвратно-поступательные движения при приводе его в движение тягами в одной точке одним приводом. На камере имеются пластинчатые клапаны одностороннего действия для большей эффективности работы подвижного органа в момент его отрыва от стенок камеры. Достигается повышение эффективности движителя. 3 н.п. ф-лы, 14 ил.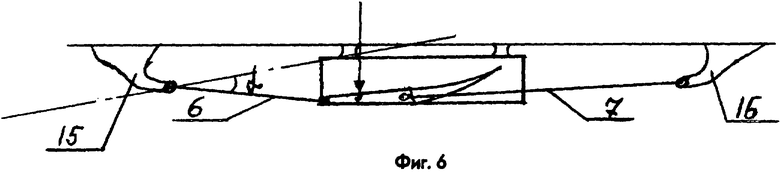
1. Махово-реактивный движитель, содержащий подвижный орган, отличающийся тем, что подвижный орган удерживается в рабочем положении тросовыми растяжками для передачи усилия по ним от работы подвижного органа на движимое судно, подвижный орган помещен в камеру коробчатого сечения или с расширенной средней частью для совершения в ней эксцентрических возвратно-поступательных движений при приводе в движение тягами в одной точке одним приводом, на камере имеются пластинчатые клапаны одностороннего действия для большей эффективности работы подвижного органа в момент его отрыва от стенок камеры.
2. Махово-реактивный движитель по п.1, отличающийся тем, что имеет подвижный орган, состоящий из двух частей - жесткой и гибкой, упругой, причем на передней, жесткой части имеются амортизатор стреловидной формы и места для присоединения растяжек и приводных тяг.
3. Махово-реактивный движитель по п.1, отличающийся тем, что передняя растяжка удерживает подвижный орган в рабочей зоне и не дает ему перемещаться назад на холостом ходу, а задняя растяжка воспринимает часть реактивной силы от подвижного органа и передает ее на корпус судна.
4. Махово-реактивный движитель по п.1, отличающийся тем, что камера расширена в средней своей части на величину толщины подвижного органа.
| КАМЕРНЫЙ ПРЯМОТОЧНЫЙ ВОДЯНОЙ ДВИЖИТЕЛЬ | 0 |
|
SU238365A1 |
| Судовой плавниковый движитель | 1984 |
|
SU1221057A1 |
| Водометный движитель | 1984 |
|
SU1284882A1 |

