Изобретение относится к легкой про- мы|шленности и может быть использовано в тефтильном производстве при отделке тка- не0.
j Цель изобретения-упрощение и повы- ше|ние КПД за счет уменьшения установлен- HOi мощности тиристорных регуляторов.
i На чертеже приведена принципиальна схема многодвигательного электропривода переменного тока поточной линии.
Ведущий каландр 1 сочленен с электро- дв||гателем 2 с фазнмм ротором, каландр 3 4 с электродвигателем 4, а каландр 5 - с электродвигателем 6. Между каландрами установлены направляющие валы 7 и ком- nei юаторы 8 и 9, связанные с соответствующе ми датчиками компенсации 10 и 11. Вь воды роторов электродвигателей 2,4 и б подключены к неуправляемым выпрямителям 12-14, выполненным, например, посхе- ме диодных мостов, которые через ре ктрры 15-17 соответственно соединены с инвертором 18. К выводам роторов всех эл15ктродвигателей, кроме последнего, по ходу движения ткани (в данном случае к 2 и 4, Цроме 6), подключены тиристорные регу- 19 и 20, входы которых соединены с датчиками 10 и 11. Ткань 21 расположена ме|жду каландрами 1,3 и 5.
Электропривод работает следующим обЬазом.
f Ткань 21 передвигается каландрами 1, 3 ij 5, которые осуществляют ее обработку. ткани регулируется компенсаторами 8 (| 9, которые приводят в действие датчики 10 и 11 компенсации.
Скорость движения ткани определяется ведомым инвертором 18. Изменяя угол ре- гуИирования инвертора 18, изменяют ско- рОсть движения ткани 21. Роторные цепи двигателей 2, 4 и 6 через выпрямители 12- 14 работают на противоЭДС инвертора 18. Р«|актЬры 15-17 сглаживают, выпрямленный тОк. При образовании чрезмерной петли датчики 10 и 11 подают команды на увеличение скорости двигателя (2, 4), стоящего вйереди по ходу движения ткани. Увеличение скорости достигается включением (или уменьшением угла регулирования) тири- сторного регулятора 19 или 20. Управление регуляторами 19 и 20 осуществляется фазо- 5 вым или широтно-импульсным способом. При полном включении регуляторов 19 и 20 соответствующие роторные цепи двигателей 4 и 2 закорачиваются, двигатели переходят на естественную характеристику, 10 скорость двигателей увеличивается и петля уменьшается.
Таким образом, при указанном подключении тиристорных регуляторов параллельно роторам двигателей, эти регуляторы 15 пропускают через себя не полный ток, а только часть его. Причем эта часть тока протекает не постоянно, а только в течение короткого промежутка времени - пока ликвидируется петля. Следовательно, сами 20 регуляторы выполняются на пониженный ток, Кроме того, поскольку в данной схеме сигнал управления действует не назад, а вперед, к впереди стоящему двигателю, и направлен на повышение его скорости, это 25 увеличивает производительность за счет увеличения скорости. .
Формула изобретения Многодвигательный электропривод переменного тока поточных линий, содержа- 30 щий электродвигатели с фазным ротором, статорные обмотки которых подключены к сети, а выводы роторов соединены с неуправляемыми выпрямителями, через реакторы подключенными к выводам общего 35 инвертора, тиристорные регуляторы, роликовые компенсаторы, связанные с датчиками компенсации, и каландры, каждый из которых связан с соответствующим электродвигателем, отличающийся тем,что, 40 с целью упрощения и повышения КПД за счет уменьшения установленной мощности тиристорных регуляторов, выходы датчиков - компенсации соединены с тиристорными регуляторами, подключенными к выводам 45 роторов по ходу движения всех размещенных перед компенсаторами электродвигателей, кроме последнего.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД СУПЕРКАЛАНДРА | 1997 |
|
RU2131641C1 |
| Многодвигательный электропривод поточной линии | 1983 |
|
SU1171948A1 |
| Многодвигательный асинхронный электропривод | 1977 |
|
SU699642A1 |
| Двухдвигательный электропривод постоянного тока | 1981 |
|
SU978307A1 |
| Многодвигательный электропривод поточной линии | 1991 |
|
SU1820474A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД ПОТОЧНОЙ | 1973 |
|
SU373824A1 |
| Многодвигательный электропривод | 1983 |
|
SU1115192A1 |
| ЭЛЕКТРИЧЕСКАЯ ПЕРЕДАЧА МОЩНОСТИ ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2297090C1 |
| Асинхронный частотно-регулируемый электропривод | 1981 |
|
SU957403A1 |
| ЭЛЕКТРОПРИВОД ТИРИСТОРНЫЙ АСИНХРОННЫЙ | 1995 |
|
RU2101847C1 |
Изобретение относится к легкой промышленности. Цель изобретения - упрощение и повышение КПД за счет уменьшения установленной мощности тиристорных преобразователей. Каландры 1, 3, 5 приводятся в движение двигателями 2, 4, 6 с фазным ротором. Имеются также направляющие валы 7 и компенсаторы 8, 9, связанные с датчиками 10, 11 компенсации. Напряжение ротора двигателей 2, 4, 6 выпрямляется неуправляемыми выпрямителями 12, 13, 14, которые через реакторы 15, 16, 17 подают ток в инвертор 18, устанавливающий скорость поточной линии. К роторам всех двигателей (2,4), кроме последнего (6), присоединены тиристорные регуляторы 19 и 20, входы управления которых связаны с выходами датчиков 10, 11 компенсации. При образовании чрезмерной петли ткани 21 датчики 10, 11 подают сигналы на увеличение скорости двигателя (4,2), стоящего впереди по ходу движения ткани 21. Увеличение скорости достигается включением (или уменьшением угла регулирования) соответствующего тиристорного регулятора 19,20. 1 ил.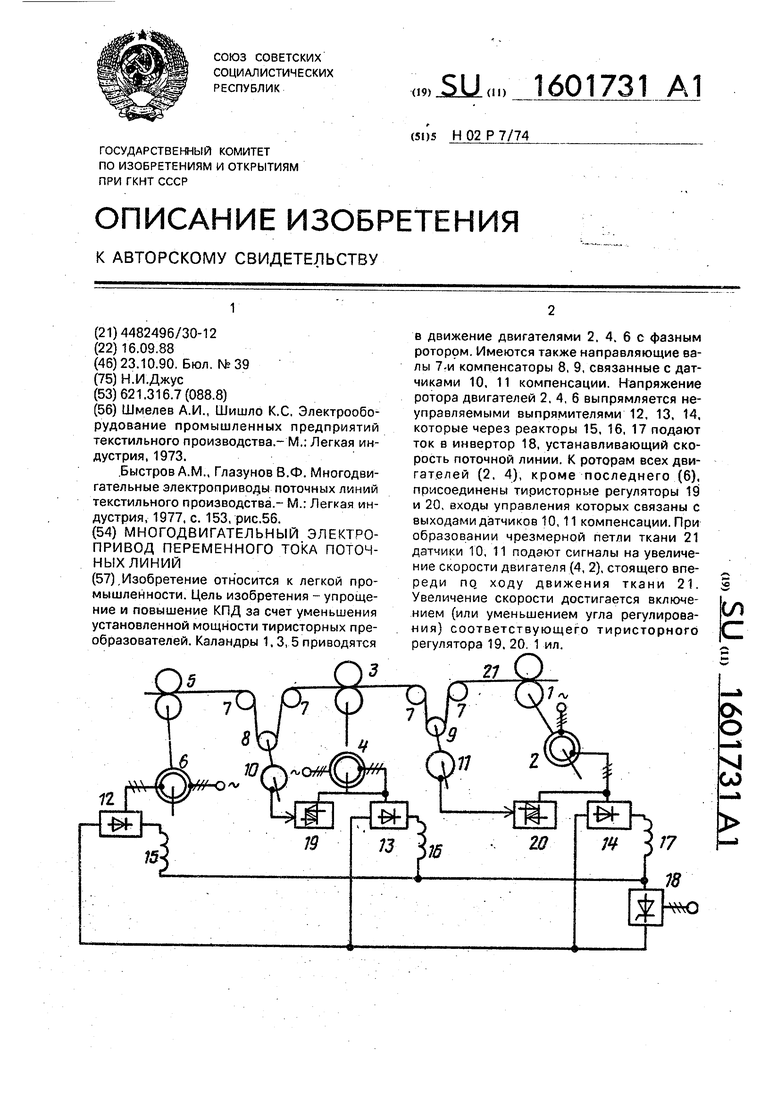
| Шмелев А.И., Шишло К.С | |||
| Электрооборудование промышленных предприятий текстильного производства.- М.; Легкая индустрия, 1973 | |||
| .Быстров A.M., Глазунов В.Ф | |||
| Многодвигательные электроприводы поточных линий текстильного производства.- М.: Легкая индустрия, 1977, с | |||
| Паровозный золотник (байпас) | 1921 |
|
SU153A1 |
