Изобретение относится к способу определения управляющего параметра для управления регулятором момента в электрическом рулевом управлении автомобиля, причем определение управляющего параметра происходит в зависимости от предварительно заданного номинального момента торсиона.
Изобретение относится к устройству управления для управления/регулирования рулевого управления в автомобиле, причем рулевое управление содержит регулятор момента и причем устройство управления содержит средства для управления регулятором момента с помощью управляющего сигнала и средства для определения управляющего сигнала в зависимости от предварительно заданного номинального момента торсиона.
Кроме того, изобретение относится к компьютерной программе, выполняемой устройством управления для управления/регулирования рулевого управления и, в частности, микропроцессором в устройстве управления.
При электрическом сервоуправлении исполнительное усилие при управляющем средстве, например, рулевом колесе, чтобы изменять или поддерживать имеющийся угол поворота рулевого колеса, создается водителем. С помощью электродвигателя создается поддерживающее усилие или поддерживающий момент, усиливающие исполнительное усилие, создаваемое водителем. Поддерживающий момент, определенный таким образом, стабилизируется с помощью дополнительных мер, препятствующих, например, возникновению нежелательных скачков момента.
Усиление исполнительного усилия, соответственно, исполнительного момента, в частности, может производиться в зависимости от исполнительного момента, так чтобы, например, при особенно большом исполнительном моменте реализовывалось меньшее усилие, чем при меньшем исполнительном моменте или, наоборот.
Из DE 10115018 A1 известен способ эксплуатации электрического сервоуправления, когда для осуществления безмоментного управления посредством регулятора состояния по текущему состоянию системы рулевого управления определяется управляющий сигнал для управления электродвигателем. При этом перед регулятором состояния включен регистратор состояний, отслеживающий параметры состояния системы рулевого управления и определяющий по ним соответствующие входные параметры, подходящие для регулятора состояний. В качестве параметров состояния системы рулевого управления используются угловая скорость со стороны шестерни, разность углов рулевого колеса и стороны шестерни, разность угловых скоростей рулевого колеса и стороны шестерни, а также текущий крутящий момент, создаваемый электродвигателем. Управляющий параметр, определяемый таким образом, обеспечивает тем самым безмоментное управление в данный момент, однако для начала без учета возмущающих воздействий. Чтобы в конечном счете обеспечить также учет возмущающих воздействий, в известном рулевом управлении предусмотрен регистратор возмущающих воздействий для определения аварийных состояний, причем в качестве аварийных состояний рассматриваются крутящий момент, создаваемый водителем, или моменты сил трения, воздействующие на рулевое управление.
Затем по управляющему сигналу, обеспечивающему безмоментное рулевое управление, путем включения возмущающих воздействий, а также предварительно заданного номинального момента торсиона определяется окончательный управляющий сигнал. Для того чтобы избежать трудоемкого измерения параметров состояния системы рулевого управления или чтобы все же учесть состояния, не поддающиеся измерению, для оценки параметров состояния, не поддающихся измерению, предусмотрено использование модели системы рулевого управления. Таким образом, оценочные параметры состояния системы управления соответствуют поведению модели системы рулевого управления.
Таким образом, точность фактического момента торсиона, установленного с помощью известной системы, в решающей степени зависит от измерения или оценки параметров состояния системы и возмущающих воздействий. При этом возмущающие воздействия или момент, определяемый в зависимости от регистратора возмущающих воздействий и используемый для определения управляющего параметра, компенсируют отклонение реальной системы рулевого управления от предполагаемого поведения модели. Таким образом, точность определения управляющего параметра зависит от качества компенсации отклонений реальной системы рулевого управления от поведения модели. Кроме того, точность зависит от качества выбранной модели.
Задачей изобретения является реализация возможности определения управляющего параметра, позволяющего настройку максимально точного предварительно заданного номинального момента торсиона.
Задача решается с помощью способа вышеупомянутого типа таким образом, что регистрируется фактический момент торсиона, из предварительно заданного номинального момента торсиона и фактического момента торсиона формируется дифференциальный момент и в зависимости от этого дифференциального момента с помощью регулятора обратной связи (Output-feedback) определяется управляющий параметра.
Регулятор обратной связи обеспечивает регулирование системы рулевого управления без знания общего состояния системы рулевого управления. Наоборот, уже достаточно небольшого количества измеренных параметров. При этом прежде всего особенно предпочтительно, чтобы измерялся только подлежащий регулированию фактический момент торсиона. Способ согласно изобретению уже только по измеренному фактическому моменту торсиона позволяет добиться особенно высокой точности настраиваемого момента торсиона за счет того, что на основе сравнения номинального момента торсиона с фактическим моментом торсиона достигается фактическое регулирование момента торсиона, в то время как в известных способах в результате учета возмущающих воздействий путем их включения и включения номинального момента возможно лишь управление моментом торсиона. Кроме того, по сравнению с уровнем техники, известным из DE 10115018 А1, способ согласно изобретению имеет то преимущество, что нет необходимости в явной оценке или явном измерении параметров состояния системы и возмущающих воздействий. Кроме того, способ согласно изобретению осуществим без регистраторов состояний и возмущающих воздействий.
В способе согласно изобретению точность достигается уже за счет того, что в способе согласно изобретению регулировка производится по номинальному моменту торсиона, необходимость в обходном пути через безмоментное рулевое управление отсутствует.
Кроме того, способ согласно изобретению имеет то преимущество, что проект регулятора обратной связи может осуществляться на основе требований к характеристике замкнутого контура регулирования. Таким образом, непосредственно устанавливаются и реализуются требования к динамическим и стационарным характеристикам отклонений фактического момента торсиона от номинального. В учете модели системы рулевого управления, в регистрации или оценке параметров состояния и возмущающих воздействий при использовании регулятора обратной связи нет необходимости. Тем самым способ согласно изобретению не только делает возможным повышение точности регулируемого фактического момента торсиона, но и сокращает затраты по созданию системы определения возмущающих воздействий для управления электродвигателем.
Предпочтительно, фактический момент торсиона фильтруется, и для формирования дифференциального момента вместо фактического момента торсиона используется отфильтрованный фактический момент торсиона. Это обеспечивает индивидуальную способность принимать форму возмущающей характеристики. Например, могут быть проигнорированы кратковременные изменения фактического момента торсиона, так что прежде всего эти возмущения не вызывают никакого изменения управляющих воздействий.
Кроме того, предпочтительно, чтобы номинальный момент торсиона фильтровался, а для формирования дифференциального момента вместо номинального момента торсиона использовался отфильтрованный номинальный момент торсиона. По аналогии с фильтрацией фактического момента торсиона путем фильтрации номинального момента торсиона может быть достигнуто индивидуальное принятие формы направляющей характеристики без необходимости вмешательства в отдельные параметры регулятора обратной связи.
Согласно другому предпочтительному варианту выполнения фактический и номинальный моменты торсиона подаются на регулятор обратной связи, и в регуляторе обратной связи создается дифференциальный момент. Этим обеспечивается особенно компактная реализация регулятора обратной связи, поскольку нет необходимости ни в каких дополнительных операциях для предоставления необходимых входных сигналов извне. Кроме того, таким путем можно добиться того, чтобы номинальный и фактический моменты торсиона могли учитываться в регуляторе обратной связи независимо друг от друга, благодаря чему достигается еще большая точность формируемого управляющего параметра.
Согласно одному из предпочтительных вариантов выполнения способа согласно изобретению определение управляющего параметра происходит дополнительно в зависимости от текущего значения управляющего параметра. При этом текущее значение управляющего параметра может подаваться на регулятор извне или вращаться внутри в качестве входного параметра. Этим обеспечивается учет внешних ограничений управляющего параметра. Кроме того, этим обеспечивается учет возможного следующего внешнего управления регулятором момента, например, для реализации желательного ручного момента за пределами диапазона измерения датчика ручного момента.
Задача решается также с помощью устройства управления вышеупомянутого типа за счет того, что устройство управления содержит средства для формирования дифференциального момента из номинального и фактического моментов торсиона, а в устройстве управления выполнен регулятор обратной связи, с помощью которого управляющий параметр определяется в зависимости от дифференциального момента. Устройство управления согласно изобретению содержит, в частности, средства для осуществления способа согласно изобретению.
Особое значение имеет осуществление способа согласно изобретению в виде компьютерной программы, готовой к выполнению на устройстве управления для управления/регулирования рулевого управления в автомобиле и, в частности, на микропроцессоре устройства управления, и составленной для осуществления способа согласно изобретению. Таким образом, в этом случае изобретение реализуется с помощью компьютерной программы, так что эта компьютерная программа равным образом представляет собой изобретение как и способ, для осуществления которого составлена компьютерная программа. Компьютерная программа, предпочтительно, хранится в запоминающем элементе. Запоминающий элемент может использоваться в виде оптической, электрической или магнитной запоминающей среды, например, в виде Digital Versatile Disc (DVD), жесткого диска (Hard Disc), памяти прямого доступа (Random-Access-Speicher), постоянной памяти (Read-Only-Speicher) или флэш-памяти (Flash-Speicher).
Другие признаки, возможности применения и преимущества изобретения вытекают из последующего описания примеров выполнения изобретения, поясняемых со ссылкой на чертежи, на которых:
фиг. 1 - схематическое представление электрического рулевого управления в автомобиле с устройством управления;
фиг. 2 - схематическое представление регулятора обратной связи согласно изобретению и
фиг. 3 - схематическое представление известного способа определения поддерживающего момента.
На фиг. 1 изображено устройство 1 управления, согласованное с рулевым управлением. В устройстве 1 управления установлен микропроцессор 3, соединенный линией 4 передачи данных, например, через систему шин, с запоминающим элементом 5. Посредством сигнальной линии 6 устройство 1 управления соединено с регулятором 7 момента, выполненным, например, в виде электродвигателя, так что управление регулятором 7 момента обеспечивается устройством 1 управления. Регулятор 7 момента действует через передаточный механизм 8 на торсион 9, на котором установлено управляющее средство, например, рулевое колесо 10.
Кроме того, рулевое управление 2 содержит рулевой механизм 11, выполненный, например, как реечный рулевой механизм. Рулевой механизм 11 в порядке альтернативы может быть выполнен как рулевой механизм типа «винт-шариковая гайка» или как рулевой механизм с шариковой гайкой. В следующем описании исходят преимущественно из рулевого управления типа «винт-шариковая гайка», причем рулевой механизм включает в себя шестерню 12а и зубчатую рейку 12b, так что торсион 9 взаимодействует с колесами 14 через шестерню 12а, а зубчатая рейка 12b взаимодействует с колесами 14 через продольную рулевую тягу 13.
Кроме того, рулевое управление 2 содержит датчик 14 момента для регистрации момента MD торсиона и (не показанные) средства передачи текущего момента MD торсиона на устройство 1 управления.
Рулевое управление 2, изображенное на фиг. 1, представляет собой только один из множества возможных вариантов выполнения направляющих устройств, пригодных для осуществления способа согласно изобретению. Другие варианты выполнения могут быть реализованы, например, с помощью других рулевых механизмов или другого устройства регулятора 7 момента или других регуляторов момента, например, других электродвигателей. Кроме того, датчик 14 может быть установлен в другом месте.
В устройстве 1 управления выполнен регулятор 20 обратной связи, реализованный, например, в виде компьютерной программы, хранящейся в запоминающем элементе 3. При осуществлении способа согласно изобретению реализующую регулятор 20 обратной связи компьютерную программу выполняют в микропроцессоре 3. Регулятор 20 обратной связи получает в качестве данных ввода по меньшей мере фактический момент MD торсиона, а также номинальный момент MD,ref. торсиона. В зависимости от входных параметров регулятор 20 обратной связи определяет управляющий параметр MM, передаваемый по линии 6 передачи данных к электродвигателю 7 и обеспечивающий управление электродвигателем 7, чтобы регулировать номинальный момент MD,ref. торсиона.
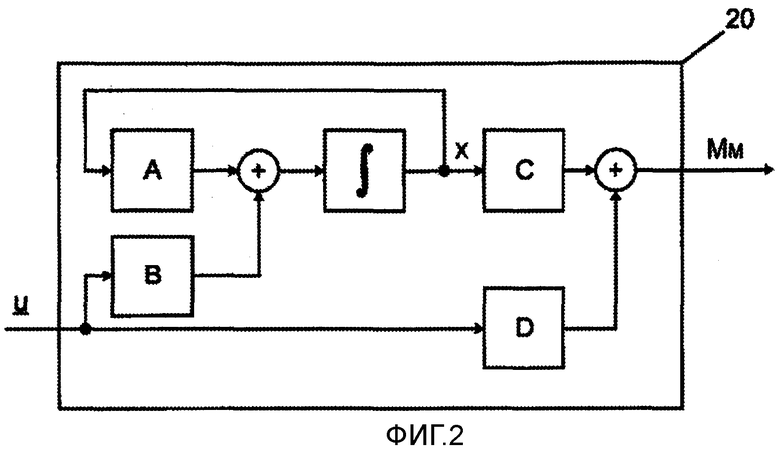
На фиг. 2 схематично изображен возможный вариант выполнения регулятора 20 обратной связи. Регулятор 20 обратной связи удовлетворяет правилу вычислений в виде:
xr,k+1=Axr,k+Buk
yk=Cxr,k+Duk,
где yk - вектор, описывающий текущие требуемые управляющие параметры, т.е. управляющий параметр для управления регулятором 7 момента.
uk - вектор, описывающий текущие измеряемые параметры и текущие номинальные параметры, т.е. по меньшей мере фактический момент MD торсиона и номинальный момент MD,ref. торсиона.
xr,k - вектор, обозначающий текущее внутреннее состояние регулятора 20 обратной связи. Само собой разумеется, что внутреннее состояние регулятора 20 обратной связи не соответствует состоянию системы 2 рулевого управления, или эквивалентной модели системы рулевого управления, используемой для определения возмущающих воздействий систем, известных из уровня техники.
A, B, C и D описывают матрицы регулятора, определяемые с помощью известных методов проектирования регуляторов обратной связи. При определении матриц A, B, C и D регулятора учитывается, что в распоряжении имеются лишь известные параметры, т.е., например, лишь фактический момент MD торсиона.
Вектор uk, в частности, может содержать также текущий реализуемый управляющий параметр. Этим обеспечивается, например, учет ограничений управляющих параметров. При этом может быть определено текущий реализуемый управляющий параметр, в частности, также с помощью оценки этого воздействия, причем оценка учитывает ограничения и особые функции. Благодаря тому, что текущий реализуемый управляющий параметр подается на регулятор 20 обратной связи вместе с вектором uk в качестве входного сигнала, могут учитываться также системно обусловленные ограничения управляющих параметров. Точно так же может учитываться ослабление управления из-за внешних требований. Кроме того, обратная связь текущего реализуемого управляющего параметра делает возможным внешнее управление управляющим элементом для реализации желательных ручных моментов за пределами диапазона измерений датчиков, предусмотренных для регистрации ручного момента.
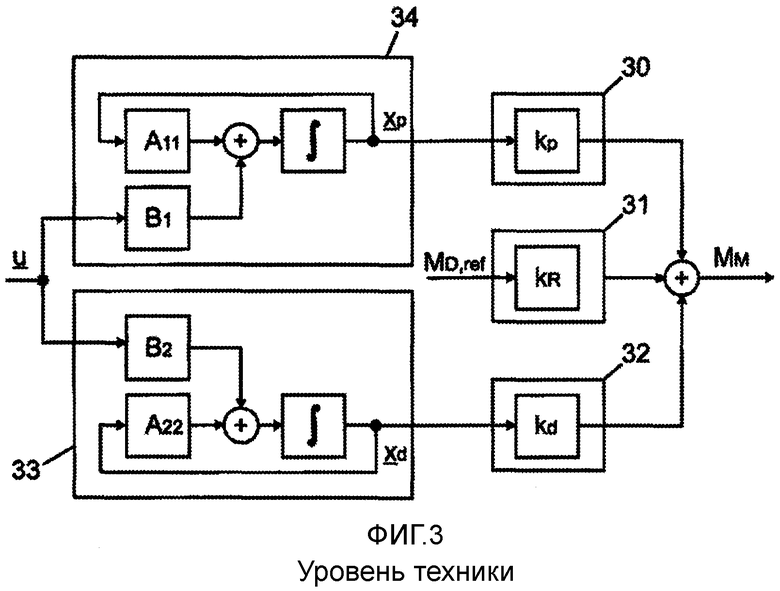
На фиг. 3 изображена блок-схема системы, ранее известной из DE 10115018 А1, для определения поддерживающего момента MM. Известным способом вначале посредством регулятора 30 состояния определяется момент, который был бы необходим для издания безмоментного управления. С помощью функционального элемента 31 соответствующим образом усиливается номинальный момент MD,ref. торсиона, а с помощью функционального элемента 32 соответствующим образом усиливаются возмущающие воздействия. Затем значения, полученные функциональными элементами 31 и 32, используются для момента, необходимого для безмоментного рулевого управления.
Кроме того, известная система содержит регистратор 33 возмущающих воздействий и регистратор 34 состояний. Таким образом, известный способ реализует уравнение следующего вида
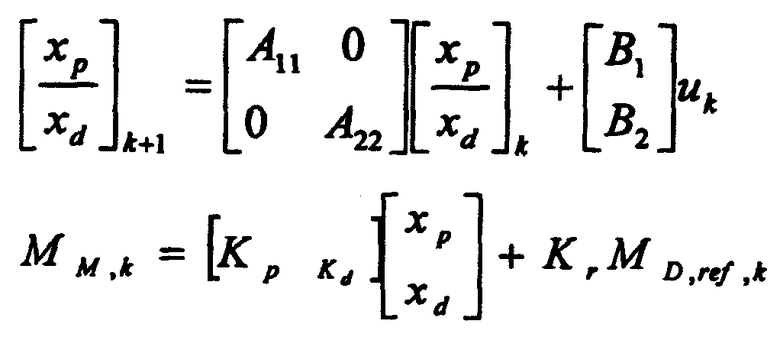
где uk означает текущие измеряемые сигналы. Матрицы А11 и В1 описывают характеристику регистратора 34 состояний. Матрицы А22 и В2 описывают характеристику регистратора 33 возмущающих воздействий. Уже это уравнение показывает, что в способе, известном из уровня техники, не осуществляется никакого сравнения между номинальным и фактическим моментами торсиона и, следовательно, никакого регулирования момента торсиона не происходит.
Таким образом, способ согласно изобретению обеспечивает по сравнению с известным способом более просто реализуемое определение управляющего параметра для установления ручного момента, причем, в частности, возможно регулирование, реализующего ручной момент, момента торсиона, так что возможна особенно точная настройка необходимого управляющего параметра. Кроме того, способ согласно изобретению не нуждается ни в каком явном задании измеряемых или оценочных возмущающих воздействий. В частности, способ согласно изобретению не зависит ни от какой модели системы рулевого управления, которая должна была бы использоваться в известных из уровня техники системах, например, для оценки отдельных параметров (воздействий).
Группа изобретений относится к управлению электроусилителем руля автомобиля. Способ определения управляющего параметра для управления регулятором момента в электрическом рулевом управлении автомобиля, в зависимости от предварительно заданного номинального момента торсиона, заключается в том, что регистрируют фактический момент торсиона, из номинального момента торсиона и фактического момента торсиона образуют дифференциальный момент. С помощью регулятора обратной связи, в зависимости от дифференциального момента, определяют управляющий параметр. Устройство управления для управления/регулирования рулевого управления с регулятором момента в автомобиле содержит средства для управления регулятором момента и средства для определения управляющего сигнала. Также устройство управления содержит средства для формирования дифференциального момента из номинального момента торсиона и фактического момента торсиона. В устройстве управления содержится регулятор обратной связи, для определения управляющего параметра. Решение направлено на повышение точности настройки предварительно заданного номинального момента торсиона. 2 н. и 8 з.п. ф-лы, 3 ил.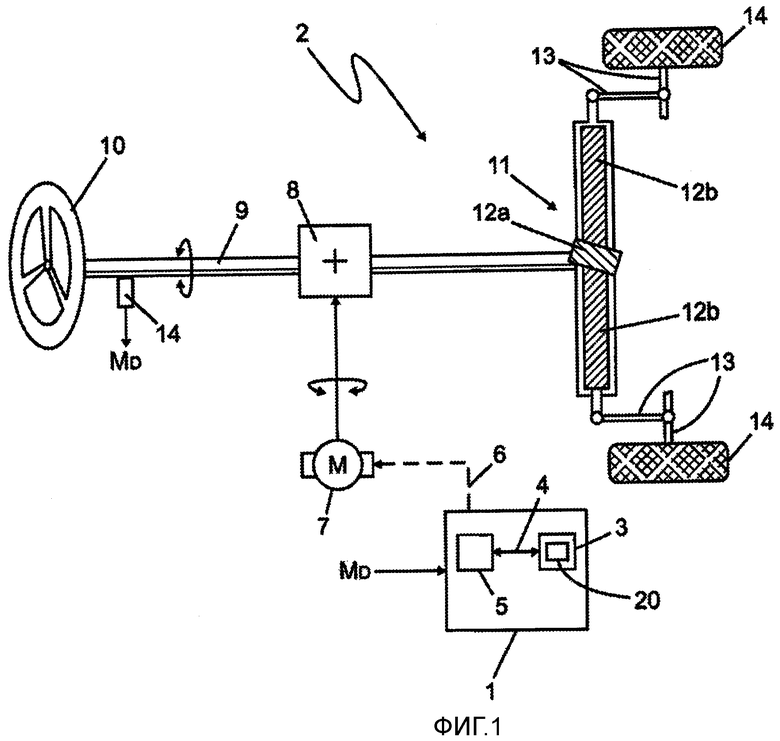
1. Способ определения управляющего параметра для управления регулятором (7) момента в электрическом рулевом управлении (2) автомобиля в зависимости от предварительно заданного номинального момента (MD,ref) торсиона, отличающийся тем, что регистрируют фактический момент (MD) торсиона, из номинального момента (MD,ref) торсиона и фактического момента (MD) торсиона образуют дифференциальный момент и с помощью регулятора (20) обратной связи в зависимости от дифференциального момента определяют управляющий параметр.
2. Способ по п.1, отличающийся тем, что фактический момент (MD) торсиона фильтруют, а вместо фактического момента (MD) торсиона для формирования дифференциального момента используют отфильтрованный фактический момент (MD) торсиона.
3. Способ по п.1 или 2, отличающийся тем, что номинальный момент (MD,ref) торсиона фильтруют, а вместо номинального момента (MD,ref) торсиона для формирования дифференциального момента используют отфильтрованный номинальный момент (MD,ref) торсиона.
4. Способ по п.1, отличающийся тем, что фактический момент (MD) торсиона и номинальный момент (MD,ref) торсиона подают на регулятор обратной связи, а в регуляторе обратной связи формируют дифференциальный момент.
5. Способ по п.1, отличающийся тем, что определение управляющего параметра осуществляют дополнительно в зависимости от текущего управляющего параметра.
6. Устройство (1) управления для управления/регулирования рулевого управления (2) в автомобиле, причем рулевое управление (2) содержит регулятор (7) момента и, причем устройство (1) управления содержит средства для управления регулятором (7) момента посредством управляющего сигнала и средства для определения управляющего сигнала в зависимости от предварительно заданного номинального момента (MD,ref) торсиона, отличающееся тем, что устройство управления содержит средства для формирования дифференциального момента из номинального момента (MD,ref) торсиона и фактического момента (MD) торсиона, а в устройстве (1) управления выполнен регулятор (20) обратной связи, с помощью которого в зависимости от дифференциального момента определяется управляющий параметр.
7. Устройство (1) управления по п.6, отличающееся тем, что в устройстве (1) управления выполнен фильтрующий элемент для фильтрования фактического момента (MD) торсиона и что устройство (1) управления содержит средства для формирования дифференциального момента из отфильтрованного фактического момента (MD) торсиона вместо фактического момента (МD) торсиона.
8. Устройство (1) управления по п.6 или 7, отличающееся тем, что в устройстве (1) управления выполнен фильтрующий элемент для фильтрования номинального момента (MD,ref) торсиона и что устройство (1) управления содержит средства для формирования дифференциального момента из отфильтрованного номинального момента (MD,ref) торсиона вместо номинального момента (MD,ref) торсиона.
9. Устройство (1) управления по п.6, отличающееся тем, что регулятор (20) обратной связи содержит средства для формирования дифференциального момента.
10. Устройство (1) управления по п.6, отличающееся тем, что управляющий параметр определяется дополнительно в зависимости от текущего управляющего параметра.
| DE 102007042874 A1, 12.03.2009 | |||
| КОЛЕСНАЯ ПАРА ТРАНСПОРТНОГО СРЕДСТВА | 1994 |
|
RU2076806C1 |
| DE 102006057880 A1, 12.06.2008 | |||
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ ЭЛЕКТРОМЕХАНИЧЕСКОГО УСИЛИТЕЛЯ РУЛЕВОГО УПРАВЛЕНИЯ | 2006 |
|
RU2304062C1 |
| Передвижной ковшевой транспортер для выгрузки рыбы | 1934 |
|
SU43837A1 |

