Изобретение относится к автоматизированным системам регистрации и документирования, позволяющим на базе анализа текущей и предыдущей информации о параметрах судовых систем выявлять тенденции развития опасных ситуаций, влияющих на безопасность судовождения.
Одним из наиболее серьезных вопросов, затрудняющих эксплуатацию кораблей и судов, является аварийность. В среднем ежегодно погибает порядка 300 только крупнотоннажных судов. Несмотря на оснащение судов и кораблей современными средствами связи и навигации, десятки плавсредств тонут при загадочных обстоятельствах и пропадают без вести.
При изучении аварий арбитраж всегда сталкивается с проблемой недостатка достоверной информации относительно попавших в них судов. Для получения полной и достоверной информации на судах и кораблях должны быть установлены автоматизированные системы регистрации и документирования (АСРД), аналогичные системам, много лет применяемым в авиации под названием «черный ящик». При повсеместном внедрении АСРД можно будет объективно расследовать аварии и катастрофы, что поможет предотвратить в будущем их повторение.
Проекты судовых АСРД существуют давно, но их реализация была невозможна без создания достаточного набора датчиков информации, объединенных в систему, и без высоконадежных накопителей данных большой емкости, помещаемых в автономные контейнеры с системой обеспечения их поиска. Для высокоавтоматизированных современных кораблей и судов проблема стала насущной, а ее решение вполне технически достижимым.
Известно устройство для аварийной сигнализации, содержащее счетчик, выходы которого соединены с соответствующими информационными входами дешифратора и адресными входами мультивибратора, информационные выходы которого соединены с выходами соответствующих датчиков, генератор импульсов, триггер, элемент И, индикаторы по числу датчиков и кнопку. Устройство используется в системах аварийной сигнализации и контроля (Морской сборник №10, 1986, с.86 [1]).
Известно устройство для дистанционного контроля температуры (патент CH №489165, кл. H04B 11/04, 1968 [2]). Это устройство содержит датчики температуры, каждый из которых через исполнительную схему связан с абонентской линией, включенной в абонентскую сесть.
Известно также устройство аварийной сигнализации, содержащее группы датчиков контролируемых параметров (дым, открытый огонь), блок отображения и сигнализации, аналого-цифровой преобразователь, блок сравнения, блок хранения установок, исполнительный блок и блок контроля состояния датчиков (Г.Н. Новопашенный. Информационно-измерительные системы. - М.: Высшая школа, 1977, с.8, 9, рис.1.2. [3]).
Недостатками известных устройств [1-3] является то, что они не обеспечивают определения непосредственного места аварии, ее характера и передачу аварийной информации непосредственно вышестоящему должностному лицу или в противопожарное подразделение.
Достоверность первичной информации на участке очаг пожара должностное лицо ложится в основу оценки ситуации и принятия решения о передаче донесения в вышестоящий орган. Должностное лицо аварийного объекта, оценивая ситуацию, должно принять одно из двух решений: о ликвидации аварии своими силами или необходимости просьбы о помощи. Принятие такого ответственного решения довольно длительный процесс, так как одно из них всегда ошибочно. Первое решение может привести к катастрофе и гибели персонала, находящегося на объекте, второе к ложной тревоге с подъемом противоаварийных сил и средств. Поэтому оценка ситуации и выбор решения должностного лица аварийного объекта с одновременным руководством борьбой за живучесть объекта неизбежно ведет к задержке передачи сигнала об аварии. Судя по возможным последствиям аварии, предпочтение должно отдаваться второму решению (о незамедлительной информации вышестоящего органа и противоаварийных сил об аварии), поэтому все объекты должны иметь системы и средства автоматической передачи сигналов об аварии, помимо воли должностных лиц. Система аварийной сигнализации должна немедленно оповещать голосом, находящийся на аварийном объекте, персонал и документировать на устройство записи аварийную информацию. Известные системы аварийной сигнализации в настоящее время этого не обеспечивают.
Известно устройство для аварийной сигнализации и оповещения (патент RU №2075783 [4]), в котором исключены недостатки аналогичных известных устройств за счет того, что в существующую систему аварийной сигнализации [3] дополнительно введен аналого-цифровой преобразователь, выход которого соединен со счетчиком числа сигналов, при этом счетчик числа сигналов соединен с блоком сравнения и исполнительным блоком, выход которого замыкает шлейф внешней абонентской связи, а второй подается на микропроцессор формирования речевых команд. При этом достигается расширение функциональных возможностей за счет автоматизации передачи сигналов оповещения о месте и характере аварии, но только на судне, без трансляции информации на внешние источники анализа информации.
Дальнейшим развитием известного устройства [4] является известная корабельная (судовая) автоматизированная система регистрации данных телеметрического контроля (В.И. Жилинков, А.А. Катанович. Корабельная автоматизированная система регистрации данных телеметрического контроля // Судостроение, №5, 2010, с.43-47 [5]), структурная схема, которой органически встраивается в общесудовой комплекс сбора и обработки данных, позволяющий на базе анализа текущей и предыдущей информации о параметрах важнейших систем судна выявить тенденции развития опасных ситуаций, предотвратить катастрофические последствия, на базе сохраненной достоверной информации разобраться в происшествиях, выяснить их причины, проанализировать действия команды в экстремальной ситуации [1].
При этом, судовой комплекс сбора, анализа и хранения данных построен на базе ЭВМ, задающей весь алгоритм функционирования комплекса. Весь поток телеметрической информации, характеризующий деятельность судна, вырабатывают датчики, установленные в жизненно важных точках. Преобразованные и оцифрованные данные от датчиков поступают в ЭВМ для анализа и регистрации. Звуковая информация: переговоры по внутренней связи, по УКВ и команды по громкоговорящей связи - в представленном варианте схемы преобразуется в цифровой вид и поступает для регистрации. Аналогично информация с видеокамеры и сигналы с РЛС тоже дискретизируются и запоминаются в цифровом виде. Все данные заносятся в защищенный контейнер для сохранения на случай аварии.
Контейнер содержит запоминающее устройство с многократной перезаписью, емкость которого достаточна для накопления информации в течение всего автономного плавания судна. Во время следующего рейса новая информация заносится на место старой по кольцу. Параллельно с записью информации в защищенный контейнер она заносится в блок регистрации с однократной записью на лазерные компакт-диски. Одна кассета рассчитывается минимум на один поход. Таким образом, создается архив информации о функционировании судна. После похода компакт-кассета заменяется на новую, а заполненная поступает в архив береговой базы для детального анализа работы всех систем судна и экипажа. Проанализировав на мощной ЭВМ данные, считанные с компакт-кассеты, береговой центр делает заключение о необходимости мелкого, среднего или капитального ремонта судна либо дает добро на следующий поход. Кроме того, анализ звукозаписи переговоров и видеозаписей маневров судна дает возможность сделать вывод об эффективности работы экипажа.
Сброс контейнера в воду обеспечивают автомат сброса, устройства ручного сброса, кодовый замок и датчики давления и температуры. При автоматическом сбросе сигнал на сброс поступает от ЭВМ по команде капитана судна. Судовая ЭВМ выдает команду на контроллер автомата сброса, при срабатывании которого контейнер падает за борт.
Второй вариант автоматического сброса применяется при аварии, для этого служат датчики давления и температуры, срабатывающие при затоплении судна и пожаре.
В случае непредвиденных обстоятельств возможна ручная отстыковка контейнера; для этого человек должен набрать условный код на замке и повернуть исполнительный рычаг, контейнер разблокируется и падает за борт.
АСРД работает в двух режимах: а) сбор и анализ информации - это режим нормального безаварийного функционирования судна, когда все параметры находятся в пределах нормы. Данные регистрируются и анализируются на предмет приближения к допустимым границам, видеокамера не включается;
б) выход отдельных параметров за пределы нормы. В этом случае судовая ЭВМ выявляет тенденцию деградации параметра, рассчитывает прогноз на будущее и сообщает оператору ЭВМ и на командный пункт, выдает оптимальный вариант функционирования судна в сложившихся условиях; в регистрационный комплекс записывается прогноз ЭВМ, ее рекомендации и принятые капитаном решения.
Так как опасная ситуация может быть обусловлена как внешними, так и внутренними причинами, то во всех случаях система выдает сообщения, а при необходимости автоматически включает сигнал тревоги. При внешней опасности в полном объеме регистрируются данные с РЛС и видеокамеры. При аварийной ситуации в регистратор заносятся данные со всех датчиков и источников информации, скорость опроса увеличивается, запись ведется, насколько это возможно, до самого сброса контейнера; если выходит из строя корабельный блок питания аппаратуры контейнера, автоматически происходит переход на автономное питание.
В режиме контроля работоспособности, который запускается периодически по заранее установленной программе, корабельная ЭВМ передает команду «начать самоконтроль», центральный процессор контейнера по программе, записанной в постоянно запоминающее устройство (ПЗУ), тестирует аппаратуру и выдает результаты в судовой комплекс. На их основе принимается решение о продолжении эксплуатации АСРД, ее ремонте либо замене. В режиме контроля предполагается без размонтирования контейнера и съема его со штатного места предусмотреть возможность считывания всей записанной информации по тому же каналу обмена данными с судовой ЭВМ.
Данный вариант комплекса предполагает использование записи информации только в дискретном виде, в том числе и речевых сигналов. Запись только цифровых данных в значительной степени упрощает конструкцию регистратора, однако при воспроизведении речи требует применения специальных устройств формирования речевых сигналов. Вариант аналоговой записи речи требует отдельного записывающего устройства, что позволяет увеличить время записи, но значительно усложняет конструкцию устройства.
Реализация известного устройства предусматривает три варианта построения регистраторов, помещаемых в защищенный контейнер. В первом варианте управление всеми блоками бортовой аппаратуры осуществляет процессор, работающий по программе, записанной в ПЗУ на твердотельных микросхемах памяти.
В качестве накопителя информации в данном варианте используется защищенный бортовой накопитель ЗБН-1-3 с емкостью памяти около 20 Мбайт и записью на стальную ленту. Такая емкость памяти предопределяет необходимость усреднения данных, запись по кольцам, выявление и отделение записи выходов параметров за пределы нормы. Для записи аналоговых сигналов предлагается использовать второй накопитель, видеокамера в комплект аппаратуры не включается из-за большого объема видеоинформации. Анализ и усреднение данных осуществляет судовая ЭВМ, а в регистратор поступает информация, готовая к записи. В безаварийном режиме работают процессор с необходимыми для его функционирования ПЗУ и оперативное запоминающее устройство (ОЗУ), интерфейсы ввода цифровой и аналоговой информации и запоминающие устройства, остальные блоки обесточены. Питание подается с судна. При пропадании питания контроллер блока питания автоматически запитывает аппаратуру от автономного аккумулятора. При сбросе контейнера расстыковывается разъем, что снимает первую ступень предохранения датчика автономности. Вторая ступень снимается при попадании контейнера в воду, после чего процессор, ориентируясь на показания датчика давления, после всплытия включает питание передатчиков и радиолокационного ответчика. В ночное и вечернее время датчик освещенности дает сигнал на включение светопроблескового маяка, команду на включение которого вырабатывает процессор с задержкой на ожидаемое время появления поисковых средств. Передатчик, РЛС и маяк работают до тех пор, пока не разрядится аккумулятор (15-20 суток) либо пока контейнер не будет поднят на борт спасательного средства и передатчики отключены. Указанные средства привода искателей могут быть аналогичны аварийным радиобуям типа АРБ МКС «Афалина», «Муссон-501».
Во втором варианте в регистрационном комплексе, в качестве основного накопителя используется долговременное запоминающее устройство на магнитооптическом диске типа ROS 600 емкостью 1 Гбайт.
Вся информация, в том числе звуковая и видео, записывается в цифровом виде, объема памяти достаточно для регистрации информации для судна, уходящего в плавания на полтора-два месяца. Для согласования потока информации, поступающего с судна, со скоростью записи можно использовать буферные ОЗУ на твердых схемах объемом 4-6 Мбайт. Все остальные узлы совпадают с предыдущим вариантом.
Основное достоинство комплекса - большой объем памяти, позволяющий без обработки записывать всю телеметрическую, звуковую и видеоинформацию любого современного судна в течение длительного плавания. Недостаток - необходимость принимать специальные меры для защиты накопителя от механических воздействий.
В третьем варианте в качестве накопителя информации могут быть использованы твердотельные микросхемы, так называемые флэш-карты, имеющие объем памяти 100 Мбайт, представляющие собой стираемое ПЗУ с неограниченным количеством циклов запись/стирание. Большим достоинством накопителя на флэш-картах является его высокая надежность, как у всех устройств на твердотельных микросхемах.
К основным недостаткам известных устройств [1-5] и в частности устройства [5] могут быть отнесены следующие недостатки.
Состав судовых телеметрических датчиков не позволяет контролировать навигационные параметры, такие как скорость, курс, углы крена и дифферента, осадка судна, координаты с их привязкой к навигационной карте, которая является юридическим документом при анализе причин аварии судна, обусловленных навигационными обстоятельствами плавания.
Сброс регистрационного комплекса за борт судна и в последствии, находящегося в «свободном» плавании, существенно затрудняет его поиск, особенно при неблагоприятных погодных условиях.
Кроме того, известные варианты активного отделения АСРД от судна предусматривают наличие на АСРД автономной навигационной системы, движителя с приводом к нему, рулевого управления по вертикали и горизонтали, системы измерения плавучести или узлов и механизмов принудительного отделения АСРД от судна при действии результирующей силы давления газов со стороны кормового среза, что существенно усложняет конструкцию АСРД.
Задачей предлагаемого технического решения является расширение функциональных возможностей судовой автоматизированной системы регистрации данных телеметрического контроля.
Поставленная задача решается за счет того, что судовая автоматизированная система регистрации данных телеметрического контроля, включающая судовую ЭВМ обработки информации, соединенную своим входом-выходом с контроллерами сбора и преобразования данных, которые своими входами соединены с выходами датчика телеметрической информации, датчиками звуковой информации, РЛС, видеокамерой наружного обзора, судовая ЭВМ обработки информации своим выходом соединена входом-выходом с входом-выходом монитора и еще одним выходом соединена с входом контроллера автомата сброса контейнера с аппаратурой регистрации, который своим выходом соединен с входом автомата сброса контейнера с аппаратурой регистрации, который своими входами соединен с выходом датчика давления и датчика температуры соответственно, автомат сброса контейнера с аппаратурой регистрации своим выходом соединен с механизмом сброса контейнера с аппаратурой регистрации, который своим вторым входом соединен с выходом устройства ручного сброса контейнера с аппаратурой регистрации, который своим входом соединен с выходом кодового замка, контейнер с аппаратурой регистрации своим выходом соединен с входом судового блока питания аппаратуры, а своим входом-выходом соединен с еще одним входом-выходом судовой ЭВМ обработки информации и этим же входом-выходом соединен с входом-выходом блока регистрации данных на накопитель, в отличие от прототипа, дополнительно содержит преобразователь навигационных параметров, который своими входами соединен с выходами навигационных датчиков измерения скорости, курса, координат, и который своим выходом соединен с входом блока регистрации данных на накопитель, преобразователь картографической информации, который своим входом соединен с выходом телевизионной камеры, установленной над рабочим полем автопрокладчика, а своим выходом соединен с входом блока регистрации данных на накопитель, монитор своими входами соединен с выходами датчиков измерения глубины, углов крена и дифферента, и глубинометра; контейнер с аппаратурой регистрации, включающий интерфейс ввода-вывода, своим входом соединенный с выходом судовой ЭВМ обработки информации, а своим входом-выходом соединен с входами-выходами процессора, контроллера записывающего устройства, системного ОЗУ, ПЗУ, контроллера устройств обеспечения поиска, буферного ОЗУ регистратора, выходами датчика давления, датчика автономности, датчика освещенности, буферное ОЗУ регистратора еще одним входом-выходом соединено с входом-выходом долговременного запоминающего устройства, контроллер устройств обеспечения поиска своими выходами соединен с входами передатчика 406 МГц, передатчика 121,5 МГц, радиолокационного ответчика 9 ГГц, светопроблескового маяка, блок питания, аккумулятор, соединенные с контроллером блока питания, соединенного с судовым блоком питания дополнительно содержит гидроакустический канал связи, своим входом-выходом, соединенный со входом-выходом процессора; контейнер с аппаратурой регистрации выполненный в виде герметичного буя, состоящего из гидродинамического демпфера, корпуса, обтекателя, крышки дополнительно содержит гидроакустический канал связи и якорное устройство.
В отличие от прототипа судовая автоматизированная система регистрации данных телеметрического контроля дополнительно содержит преобразователь навигационных параметров, который своими входами соединен с выходами навигационных датчиков измерения скорости, курса, координат, глубины, углов крена и дифферента и который своим выходом соединен с входом блока регистрации данных на накопитель, преобразователь картографической информации, который своим входом соединен с выходом телевизионной камеры, установленной над рабочим полем автопрокладчика, а своим выходом соединен с входом блока регистрации данных на накопитель, входы автопрокладчика соединены с выходами навигационных датчиков измерения курса, скорости и координат; контейнер с аппаратурой регистрации дополнительно содержит гидроакустический канал связи и якорное устройство.
Сущность изобретения поясняется чертежами (фиг.1, 2, 3).
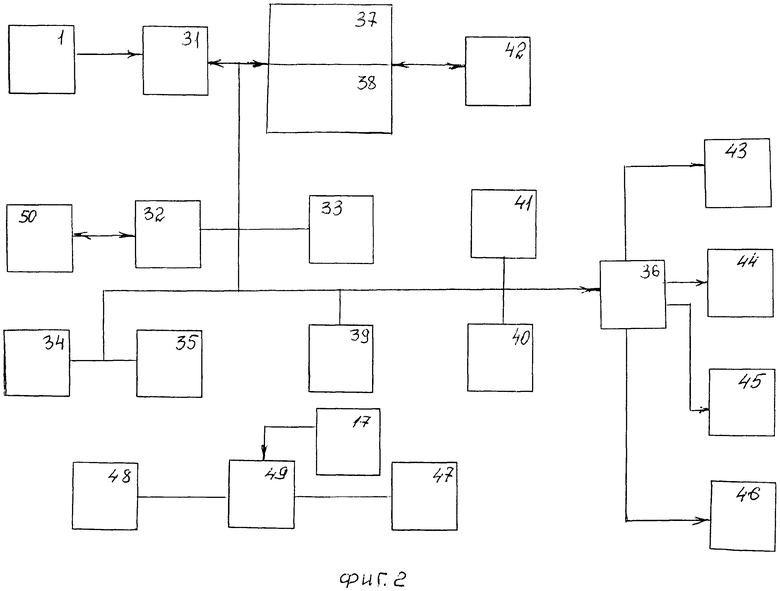
Фиг.1. Блок-схема судовой автоматизированной системы регистрации данных телеметрического контроля, содержит судовую ЭВМ 1 обработки информации, соединенную своим входом-выходом с контроллерами 2 сбора и преобразования данных, которые своими входами соединены с выходами датчика 3 телеметрической информации, датчиками 4 звуковой информации, РЛС 5, видеокамерой 6 наружного обзора, судовая ЭВМ 1 обработки информации своим входом-выходом соединена с входом-выходом монитора 7 и еще одним выходом соединена с входом контроллера 8 автомата 9 сброса, контейнера 10 с аппаратурой, который своим выходом соединен с входом автомата 9 сброса контейнера 10 с аппаратурой, который своими входами соединен с выходом датчика 11 давления и датчика 12 температуры соответственно, автомат 9 сброса контейнера 10 с аппаратурой своим выходом соединен с механизмом 13 сброса контейнера 10 с аппаратурой регистрации 14, который своим вторым входом соединен с выходом устройства 15 ручного сброса контейнера 10 с аппаратурой, который своим входом соединен с выходом кодового замка 16, контейнер 10 с аппаратурой регистрации 14 своим выходом соединен с входом судового блока питания 17 аппаратуры, а своим входом-выходом соединен с еще одним входом-выходом судовой ЭВМ 1 обработки информации и этим же входом - выходом соединен с входом-выходом блока 18 регистрации данных на накопитель 19, который своим входом соединен с выходом блока 18 регистрации данных на накопитель 19, преобразователь 20 навигационных параметров, который своими входами соединен с выходами навигационных датчиков измерения скорости 21, курса 22, координат 23, глубины 24, и который своим выходом соединен с входом блока 18 регистрации данных на накопитель 19, преобразователь 27 картографической информации, который своим входом соединен с выходом телевизионной камеры 28, установленной над рабочим полем автопрокладчика 29, а своим выходом соединен с входом блока 18 регистрации данных на накопитель 19. Навигационные датчики измерения скорости 21, курса 22 и координат 23, вторыми своими выходами соединены с входами автопрокладчика 28. Монитор 7 своими входами соединен с выходами датчиков измерения глубины 24, углов крена 25 и дифферента 26, глубиномера 30.
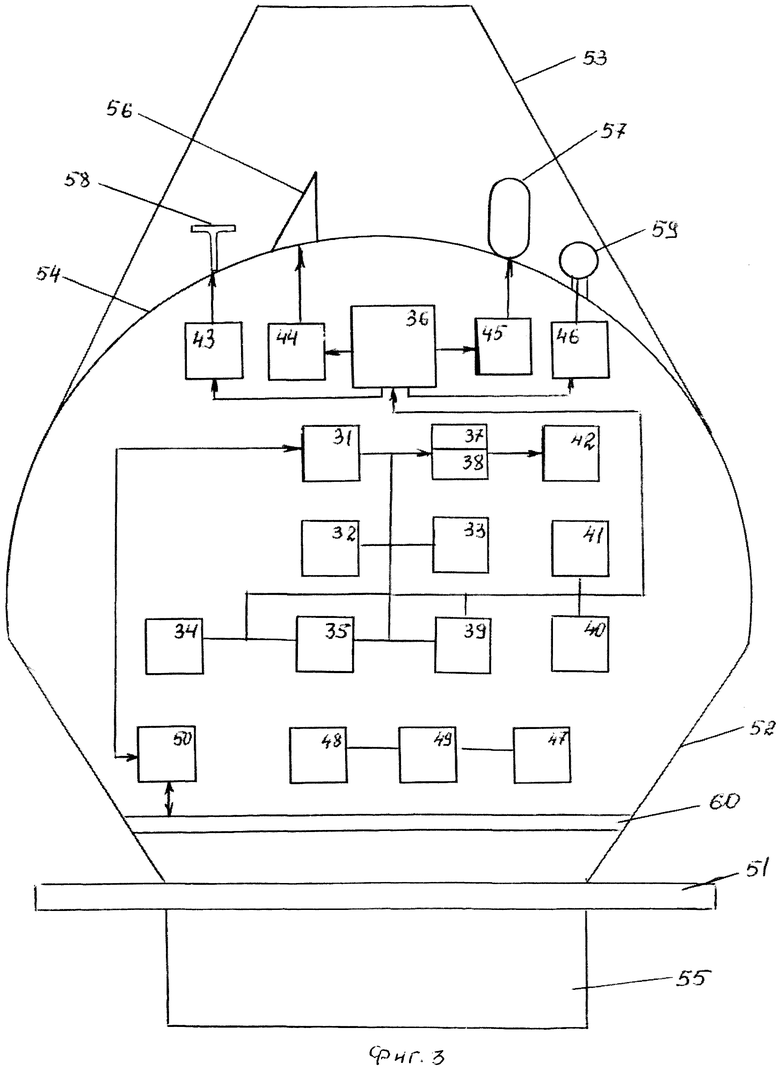
Фиг.2. Блок-схема контейнера 10 с аппаратурой регистрации. Внутри контейнера 10 с аппаратурой регистрации размещены интерфейс 31 ввода-вывода, своим входом соединенный с выходом судовой ЭВМ 1 обработки информации, а своим входом-выходом соединен с входами-выходами процессора 32, контроллера 33 записывающего устройства, системного ОЗУ 34, ПЗУ 35, контроллера 36 устройств обеспечения поиска, буферного ОЗУ 37, регистратора 38, выходами датчика 39 давления, датчика 40 автономности, датчика 41 освещенности, буферное ОЗУ 37 регистратора 38 еще одним входом-выходом соединено с входом-выходом долговременного запоминающего устройства 42, контроллер 36 устройств обеспечения поиска своими выходами соединен с входами передатчика 43 с частотой 406 МГц, передатчика 44 с частотой 121,5 МГц, радиолокационного ответчика 45 с частотой 9 ГГц, светопроблескового маяка 46, соответственно. Контейнер 10 с аппаратурой регистрации также содержит блок питания 47, аккумулятор 48, соединенные с контроллером 49 блока питания 47, соединенного с судовым блоком питания, гидроакустический канал связи 50, соединенный своим входом-выходом с входом-выходом процессора 32.
Фиг.3. Конструкция контейнера 10 с аппаратурой регистрации. Контейнер 10 с аппаратурой регистрации выполнен в виде герметичного буя, состоящего из гидродинамического демпфера 51, корпуса 52, обтекателя 53, крышки 54, и якорного устройства 55.
Внутри контейнера 10 с аппаратурой регистрации размещены интерфейс 31 ввода-вывода, своим входом соединенный с выходом судовой ЭВМ 1 обработки информации, а своим входом-выходом соединен с входами-выходами процессора 32, контроллера 33 записывающего устройства, системного ОЗУ 34, ПЗУ 35, контроллера 36 устройств обеспечения поиска, буферного ОЗУ 37, регистратора 38, выходами датчика 39 давления, датчика 40 автономности, датчика 41 освещенности, буферное ОЗУ 37 регистратора 38 еще одним входом-выходом соединено с входом-выходом долговременного запоминающего устройства 42, контроллер 36 устройств обеспечения поиска своими выходами соединен с входами передатчика 43 с частотой 406 МГц, передатчика 44 с частотой 121,5 МГц, радиолокационного ответчика 45 с частотой 9 ГГц, светопроблескового маяка 46, соответственно. Контейнер 10 с аппаратурой также содержит блок питания 47, аккумулятор 48, соединенные с контроллером 49 блока питания 47, соединенного с судовым блоком питания, гидроакустический канал связи 50, соединенный своим входом-выходом с входом-выходом процессора 32.
На корпусе 52 контейнера 10 с аппаратурой регистрации, под обтекателем размещены антенна 56 передатчика 44 спутникового канала связи, отражатель 57 радиолокационного ответчика 45, антенна 58 передатчика 43 радиомаяка, устройство излучения 59 светопроблескового маяка 46, гидроакустическая приемоизлучающая антенна 60 гидроакустического канала связи 50.
Судовая автоматизированная система регистрации данных телеметрического контроля построена на базе судовой ЭВМ 1, задающей весь алгоритм функционирования комплекса. Весь поток телеметрической информации, характеризующий деятельность судна, вырабатывают датчики 3 телеметрической информации, установленные в жизненно важных точках. Преобразованные и оцифрованные данные от датчиков 3 телеметрической информации поступают в судовую ЭВМ 1 через контроллеры 2 сбора и преобразования данных для анализа и регистрации. Звуковая информация: переговоры по внутренней связи, по УКВ и команды по громкоговорящей связи от датчиков 4 звуковой информации преобразуется в цифровой вид и поступает через контроллеры 2 сбора и преобразования данных для анализа и регистрации на судовую ЭВМ 2 для регистрации.
Аналогично, преобразованная и оцифрованная информация с видеокамеры 6, монитора 7 и сигналы с РЛС 5 тоже дискретизируются и запоминаются в цифровом виде, также как и информация с преобразователя 27 картографической информации, который своим входом соединен с выходом телевизионной камеры 28, установленной над рабочим полем автопрокладчика 29, а своим выходом соединен с входом блока 18 регистрации данных на накопитель 19. Навигационные датчики измерения скорости 21, курса 22 и координат 23, вторыми своими выходами соединены с входами автопрокладчика 29.
Посредством телевизионной камеры 28, установленной над рабочим полем автопрокладчика 29 снимается телевизионная картинка навигационной карты, перемещение по ней судна в виде символа в зависимости от скорости, курса относительно координатных точек.
На монитор 7 поступают данные с датчиков измерения глубины 24, углов крена 25 и дифферента 26 и глубиномера 30.
Информация от датчика измерения глубины 24, в качестве которого применен многолучевой эхолот и от глубиномера 30 используется для определения текущей осадки судна, что позволяет контролировать прохождение судна над отмелями, банками и рифами.
Все данные заносятся в защищенный контейнер 10 с аппаратурой регистрации для сохранения на случай аварии.
Контейнер 10 с аппаратурой регистрации содержит запоминающее устройство с многократной перезаписью, емкость которого достаточна для накопления информации в течение всего автономного плавания судна. Во время следующего рейса новая информация заносится на место старой по кольцу. Параллельно с записью информации в защищенный контейнер она заносится в блок регистрации с однократной записью на лазерные компакт-диски. Одна кассета рассчитывается минимум на один поход. Таким образом, создается архив информации о функционировании судна. После похода компакт-кассета заменяется на новую, а заполненная поступает в архив береговой базы для детального анализа работы всех систем судна и экипажа. Проанализировав на мощной ЭВМ данные, считанные с компакт - кассеты, береговой центр делает заключение о необходимости мелкого, среднего или капитального ремонта судна либо дает добро на следующий поход. Кроме того, анализ звукозаписи переговоров и видеозаписей маневров судна дает возможность сделать вывод об эффективности работы экипажа.
Сброс контейнера 10 с аппаратурой регистрации в воду обеспечивают автомат 9 сброса, устройство 15 ручного сброса, кодовый замок 16 и датчики давления 11 и температуры 12. При автоматическом сбросе сигнал на сброс поступает от судовой ЭВМ 1 по команде капитана судна. Судовая ЭВМ 1 выдает команду на контроллер автомата 9 сброса, при срабатывании которого контейнер 10 с аппаратурой регистрации падает за борт судна. Второй вариант автоматического сброса применяется при аварии, для этого служат датчики давления 11 и температуры 12, срабатывающие при затоплении судна и пожаре. В случае непредвиденных обстоятельств предусмотрена ручная отстыковка контейнера 10 с аппаратурой регистрации; для этого необходимо набрать условный код на кодовом замке 16 и повернуть исполнительный рычаг механизма 13 сброса контейнера 10 с аппаратурой регистрации, контейнер 10 с аппаратурой регистрации разблокируется и падает за борт.
АСРД работает в следующих режимах:
- сбор и анализ информации - это режим нормального безаварийного функционирования судна, когда все параметры находятся в пределах нормы. Данные регистрируются и анализируются на предмет приближения к допустимым границам, видеокамера не включается;
- выход отдельных параметров за пределы нормы. В этом случае судовая ЭВМ 1 выявляет тенденцию деградации параметра, рассчитывает прогноз на будущее и сообщает оператору судовой ЭВМ 1 и на командный пункт, выдает оптимальный вариант функционирования судна в сложившихся условиях; в регистрационный комплекс записывается прогноз судовой ЭВМ 1, ее рекомендации и принятые капитаном решения;
- опасная ситуация (может быть обусловлена как внешними, так и внутренними причинами).
Во всех случаях система выдает сообщения, а при необходимости автоматически включает сигнал тревоги. При внешней опасности в полном объеме регистрируются данные с РЛС 5 и видеокамеры 6, а также данные с монитора 7 и автопрокладчика 29. При аварийной ситуации в регистратор 38 заносятся данные со всех датчиков и источников информации, скорость опроса увеличивается, запись ведется, насколько это возможно, до самого сброса контейнера 10 с аппаратурой регистрации. При нахождении контейнера 10 с аппаратурой регистрации в воде, автоматически происходит переход на автономное питание.
В режиме контроля работоспособности, который запускается периодически по заранее установленной программе, корабельная ЭВМ передает команду «начать самоконтроль», центральный процессор 32 контейнера 10 с аппаратурой регистрации по программе, записанной в постоянно запоминающее устройство (ПЗУ) 35, тестирует аппаратуру и выдает результаты в судовой комплекс. На их основе принимается решение о продолжении эксплуатации АСРД, ее ремонте либо замене. В режиме контроля без размонтирования контейнера 10 с аппаратурой регистрации и съема его со штатного места вся записанная информация считывается по тому же каналу обмена данными с судовой ЭВМ 1.
В качестве накопителя 19 информации использованы твердотельные микросхемы, так называемые флэш-карты, имеющие объем памяти 100 Мбайт, представляющие собой стираемое ПЗУ с неограниченным количеством циклов запись/стирание. Большим достоинством накопителя на флэш-картах является его высокая надежность, как у всех устройств на твердотельных микросхемах.
Режим аварийной сигнализации и оповещения на судне обеспечивается в соответствии с алгоритмами, приведенными в источнике информации (патент RU №2075783), путем подключения АСРД к внешним абонентским устройствам.
Контейнер 10 с аппаратурой регистрации выполнен в виде герметичного буя, состоящего из гидродинамического демпфера 51, корпуса 52, обтекателя 53, крышки 54, и якорного устройства 55.
Внутри контейнера 10 с аппаратурой регистрации размещены интерфейс 31 ввода-вывода, своим входом соединенный с выходом судовой ЭВМ 1 обработки информации, а своим входом-выходом соединен с входами-выходами процессора 32, контроллера 33 записывающего устройства, системного ОЗУ 34, ПЗУ 35, контроллера 36 устройств обеспечения поиска, буферного ОЗУ 37, регистратора 38, выходами датчика 39 давления, датчика 40 автономности, датчика 41 освещенности, буферное ОЗУ 37 регистратора 38 еще одним входом-выходом соединено с входом-выходом долговременного запоминающего устройства 42, контроллер 36 устройств обеспечения поиска своими выходами соединен с входами передатчика 43 с частотой 406 МГц, передатчика 44 с частотой 121,5 МГц, радиолокационного ответчика 45 с частотой 9 ГГц, светопроблескового маяка 46, соответственно. Контейнер 10 с аппаратурой также содержит блок питания 47, аккумулятор 48, соединенные с контроллером 49 блока питания 47, соединенного с судовым блоком питания, гидроакустический канал связи 50, соединенный своим входом-выходом с входом-выходом процессора 32.
На корпусе 52 контейнера 10 с аппаратурой регистрации, под обтекателем размещены антенна 56 передатчика 44 спутникового канала связи, отражатель 57 радиолокационного ответчика 45, антенна 58 передатчика 43 радиомаяка, устройство излучения 59 светопроблескового маяка 46, гидроакустическая приемоизлучающая антенна 60 гидроакустического канала связи 50.
Якорное устройство 55 предназначено для погружения контейнера 10 с аппаратурой регистрации на дно для обеспечения его безопасности при авариях судна техногенного происхождения. При этом, благодаря наличию гидроакустического канала связи 50, запускаемого в режим работы посредством внутреннего таймера, контейнер 10 с регистрирующей аппаратурой может быть обнаружен другими судами, находящимися в районе судна, потерпевшего аварию.
Якорное устройство 55 представляет собой груз, закрепленный посредством строп на корпусе 52 контейнера 10 с аппаратурой регистрации посредством гидроакустического размыкателя типа «АГАР-ЭХМ» или типа «АГАР-МП» (http://www.edboe.ru). При ликвидации очага поражения вокруг судна потерпевшего техногенную аварию, по сигналу, переданному по гидроакустическому каналу связи 50 с поискового или любого судна, находящегося в районе аварии или по сигналу внутреннего таймера по предварительно установленному времени, груз может быть отсоединен от контейнера 10 с аппаратурой регистрации. При этом контейнер 10 с аппаратурой регистрации всплывет на поверхность. При нахождении контейнера 10 с аппаратурой регистрации на дне или на поверхности моря, экстренная служебная информация может быть передана по гидроакустическому каналу связи 50, посредством приемоизлучающей антенны 60. При неблагоприятных погодных условиях и сбоях радиосигналов, поиск контейнера 10 с аппаратурой регистрации может производиться по гидроакустическим сигналам в режиме запрос-ответ.
Положительный эффект заявляемого изобретения заключается в расширении функциональных возможностей систем аварийной сигнализации, а также повышении оперативности передачи сигналов аварийного оповещения и поиска контейнера с аппаратурой регистрации.
Кроме того, предлагаемая автоматизированная система регистрации данных телеметрического контроля позволяет регистрировать текущую навигационную обстановку плавания как собственного судна, посредством датчиков определения навигационных параметров (скорость, курс, координаты, линия пути относительно навигационных ориентиров), так и элементов движения судов, находящихся в зоне действия судовой РЛС, что повышает объективность анализа факторов и событий, ставшими причиной создания аварийной обстановки.
Источники информации
1. Морской сборник №10, 1986, с.86.
2. Патент CH №489165, кл. H04B 11/04, 1968.
3. Г.Н. Новопашенный. Информационно-измерительные системы. - М.: Высшая школа, 1977, с.8, 9, рис.1.2.
4. Патент RU №2075783.
5. В.И. Жилинков, А.А. Катанович. Корабельная автоматизированная система регистрации данных телеметрического контроля // Судостроение, №5, 2010, с.43-47.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВИЖНЫЙ МОРСКОЙ АППАРАТ ДЛЯ ПОДВОДНЫХ ИССЛЕДОВАНИЙ | 2011 |
|
RU2478059C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| АВТОРУЛЕВОЙ СУДНА | 2011 |
|
RU2465170C1 |
| СИСТЕМА НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2011 |
|
RU2460043C1 |
| ПОДВОДНЫЙ ЗОНД | 2008 |
|
RU2370787C1 |
| СПОСОБ КОНТРОЛЯ МОРЕХОДНОСТИ СУДНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2467914C1 |
| ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2371738C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИН АКВАТОРИИ ГИДРОЛОКАТОРОМ БОКОВОГО ОБЗОРА И ГИДРОЛОКАТОР БОКОВОГО ОБЗОРА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2484499C1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ ДЛЯ СУДОВ ЛЕДОВОГО ПЛАВАНИЯ | 2011 |
|
RU2489721C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ И СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА С КОМПЕНСАЦИЕЙ МЕДЛЕННО МЕНЯЮЩИХСЯ ВНЕШНИХ ВОЗМУЩЕНИЙ | 2014 |
|
RU2564786C1 |
Изобретение относится к автоматизированным системам регистрации и документирования. Судовая автоматизированная система регистрации данных телеметрического контроля содержит судовую ЭВМ обработки информации, соединенную своим входом-выходом с контроллерами сбора и преобразования данных, которые своими входами соединены с выходами датчика телеметрической информации, датчиками звуковой информации, РЛС, видеокамерой наружного обзора. Судовая ЭВМ обработки информации своим входом-выходом соединена с входом-выходом монитора и еще одним выходом соединена с входом контроллера автомата сброса контейнера с аппаратурой регистрации, который своим выходом соединен с входом автомата сброса контейнера с аппаратурой регистрации, который своими входами соединен с выходом датчика давления и датчика температуры. Автомат сброса контейнера с аппаратурой регистрации своим выходом соединен с механизмом сброса контейнера с аппаратурой регистрации, который своим вторым входом соединен с выходом устройства ручного сброса контейнера с аппаратурой регистрации, которое своим входом соединено с выходом кодового замка. Контейнер с аппаратурой регистрации соединен с еще одним входом-выходом судовой ЭВМ и который этим же входом-выходом соединен с входом-выходом блока регистрации данных на накопитель. Система содержит преобразователь навигационных параметров, который своими входами соединен с выходами навигационных датчиков измерения скорости, курса, координат. Преобразователь своим выходом соединен с входом блока регистрации данных на накопитель, преобразователь картографической информации, который своим входом соединен с выходом телевизионной камеры, установленной над рабочим полем автопрокладчика, а своим выходом соединен с входом блока регистрации данных на накопитель. Монитор своими входами соединен с выходами датчиков измерения глубины, углов крена и дифферента, и глубинометра. Входы автопрокладчика соединены с выходами навигационных датчиков измерения курса, скорости и координат. Достигается расширение функциональных возможностей систем аварийной сигнализации, повышение оперативности передачи сигналов оповещения и поиска контейнера, повышение объективности анализа обстановки. 2 з.п. ф-лы, 3 ил.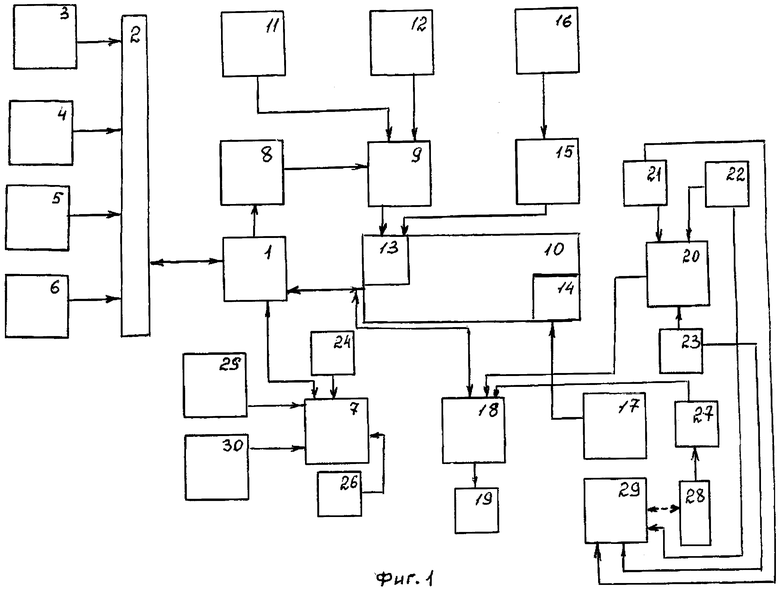
1. Судовая автоматизированная система регистрации данных телеметрического контроля, включающая судовую ЭВМ обработки информации, соединенную своим входом-выходом с контроллерами сбора и преобразования данных, которые своими входами соединены с выходами датчика телеметрической информации, датчиками звуковой информации, РЛС, видеокамерой наружного обзора, судовая ЭВМ обработки информации своим входом-выходом соединена с входом-выходом монитора и еще одним выходом соединена с входом контроллера автомата сброса контейнера с аппаратурой регистрации, который своим выходом соединен с входом автомата сброса контейнера с аппаратурой регистрации, который своими входами соединен с выходом датчика давления и датчика температуры соответственно, автомат сброса контейнера с аппаратурой регистрации своим выходом соединен с механизмом сброса контейнера с аппаратурой регистрации, который своим вторым входом соединен с выходом устройства ручного сброса контейнера с аппаратурой регистрации, которое своим входом соединено с выходом кодового замка, контейнер с аппаратурой регистрации соединен с еще одним входом-выходом судовой ЭВМ и который этим же входом-выходом соединен с входом-выходом блока регистрации данных на накопитель, отличающаяся тем, что судовая автоматизированная система регистрации данных телеметрического контроля дополнительно содержит преобразователь навигационных параметров, который своими входами соединен с выходами навигационных датчиков измерения скорости, курса, координат, и который своим выходом соединен с входом блока регистрации данных на накопитель, преобразователь картографической информации, который своим входом соединен с выходом телевизионной камеры, установленной над рабочим полем автопрокладчика, а своим выходом соединен с входом блока регистрации данных на накопитель, монитор своими входами соединен с выходами датчиков измерения глубины, углов крена и дифферента, и глубинометра, входы автопрокладчика соединены с выходами навигационных датчиков измерения курса, скорости и координат.
2. Судовая автоматизированная система регистрации данных телеметрического контроля по п.1, отличающаяся тем, что контейнер с аппаратурой регистрации дополнительно содержит гидроакустический канал связи, своим входом-выходом соединенный с входом-выходом процессора.
3. Судовая автоматизированная система регистрации данных телеметрического контроля по п.1 или 2, отличающаяся тем, что контейнер с аппаратурой регистрации дополнительно содержит якорное устройство.
| ИНТЕГРИРОВАННАЯ СИСТЕМА МОНИТОРИНГА КОНТРОЛИРУЕМЫХ ОБЪЕКТОВ | 2006 |
|
RU2417451C2 |
| СПОСОБ ИНТЕЛЛЕКТУАЛЬНОЙ ПОДДЕРЖКИ ДЕЯТЕЛЬНОСТИ ЭКИПАЖА ПО ОБЕСПЕЧЕНИЮ БЕЗОПАСНОСТИ КОРАБЛЯ | 2002 |
|
RU2244343C2 |
| RU 2010101961 A, 27.07.2011 | |||
| УСТРОЙСТВО ДЛЯ АВАРИЙНОЙ СИГНАЛИЗАЦИИ И ОПОВЕЩЕНИЯ | 1992 |
|
RU2075783C1 |
| RU 2005124413 A, 10.02.2007. | |||

