////////
у/777 
| название | год | авторы | номер документа |
|---|---|---|---|
| МАЯТНИКОВЫЙ ДАТЧИК УГЛА НАКЛОНА | 2012 |
|
RU2500988C1 |
| ФУНКЦИОНАЛЬНЫЙ ДАТЧИК ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ СВАРОЧНОЙ ВАННЫ | 2003 |
|
RU2241207C1 |
| МАЯТНИКОВЫЙ ДАТЧИК УГЛА НАКЛОНА | 2014 |
|
RU2548397C1 |
| ИНКЛИНОМЕТР | 1995 |
|
RU2111454C1 |
| Маятниковый датчик угла наклона | 1990 |
|
SU1776992A1 |
| Гироскопический маятник | 2019 |
|
RU2719241C1 |
| ДАТЧИК ДЛЯ ИЗМЕРЕНИЯ УГЛОВ ПОВОРОТА ПОДВИЖНЫХ ЭЛЕМЕНТОВ КОНСТРУКЦИЙ | 2015 |
|
RU2605005C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ МАЯТНИКОВЫЙ ДАТЧИК УГЛА НАКЛОНА | 2022 |
|
RU2807094C1 |
| Гироскопический маятник | 2020 |
|
RU2747913C1 |
| Трехосный гиростабилизатор киноаппарата | 1981 |
|
SU979855A1 |
Изобретение относится к измерительной технике , в частности, к устройствам определения углов наклона подвижных объектов. Цель изобретения состоит в повышении точности измерения за счет компенсации влияния ускорения точки подвеса. Датчик содержит корпус 1, в котором находится маятник, выполненный в виде двух боковых стержней 5 равной длины, верхними концами подвешенных на одной оси 2 к корпусу 1 и шарнирно связанных между собой по нижним концам третьим поперечным стержнем 6. На маятнике установлен преобразователь в виде индукционных датчиков угла 3,7, один из которых 3 установлен на оси подвеса 2. Вертикальная составляющая компенсируется механическим способом посредством того, что подвижный подвес маятника выполнен в виде зубчатой передачи, которая реализуется зубчатой рейкой, расположенной на внутренней стороне прорези верхних концов обоих боковых стержней, и зубчатым колесом, вращающимся на оси подвеса. Создаваемое зацепление допускает поступательное перемещение обоих боковых стержней одновременно только в разные стороны. Горизонтальная составляющая ускорения компенсируется введением дополнительной электрической цепи. Для этого в местах шарнирного крепления боковых стержней с поперечным установлены дополнительно два индукционных датчика угла, статоры которых жестко прикреплены к поперечному стержню, а обмотки роторов, жестко закрепленных к боковым стержням, соединены последовательно и встречно и через усилитель - с обмоткой ротора датчика угла подвеса. 3 ил.
(Л
СП
00
sэ
со
фие.1
31500823
са 2. Вертикальная составляющая компенсируется механическим с:пособом посредством того, что 11од1зижный подвес маятника выполнен в виде зубчатой j передачи, которая реализуется зубчатой рейкой, расположенной на внутренней стороне прорези верхних концов обоих боковых стержней, и зубчатым колесом, вращающимся на оси подвеса. Ю Создаваемое зацепление допускает поступательное перемещение обоих боко-i вых стержней одновременно только в разные стороны. Горизонтальная составИзобретение относится к измерительной технике, в частности к уст- ройствам определения углов наклона подвижных объектов.
Целью изобретения является повышение точности за счет уменьшения .влияния ошибок, обусловленных дей- ствием ускорений.
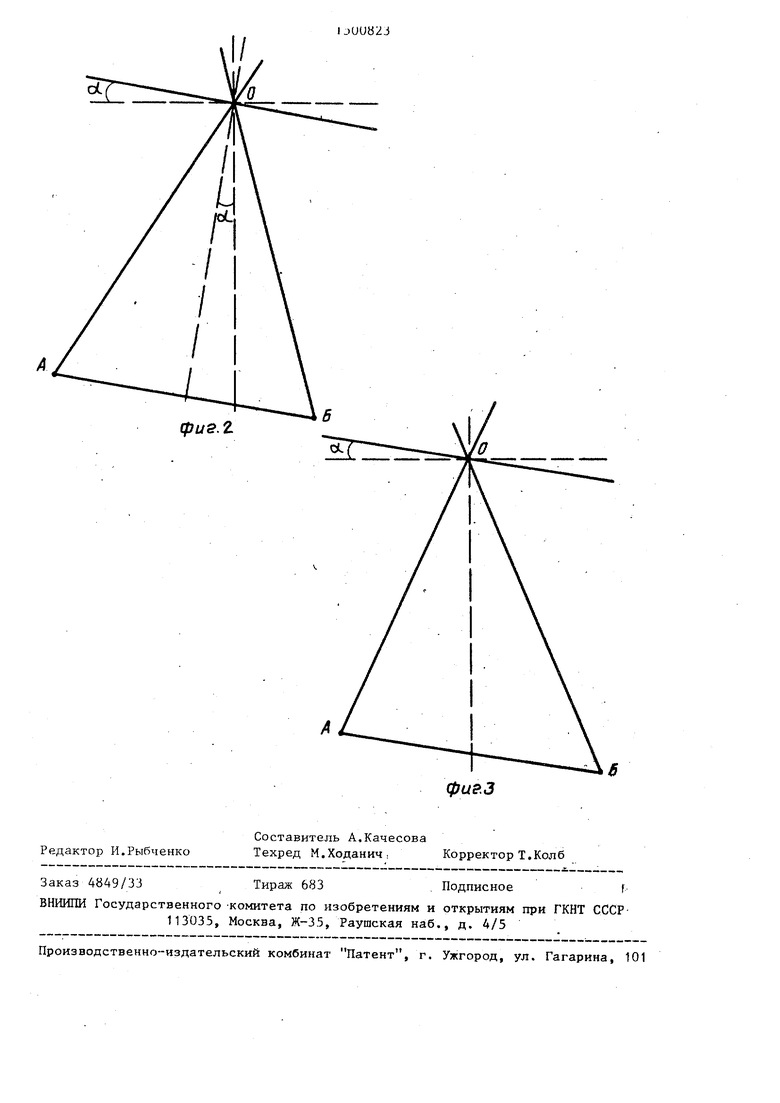
На фиг, приведена принципиальная схема маятникового датчика при отсутствии наклона подвижного объекта; на фиг,2 - то же, при наклоне объекта влево при отсутствии ускорения в плоскости маятника; на фиг,3 - то же, при действии ускорения в плоскости маятника и наклоне объекта.
Маятниковый датчик наклона подвиж- ного объекта содержит корпус 1, под-t вес 2, индукционный первичный преоб- разователь 3 угла поворота, пружину 4 боковые 5 и поперечньй 6 стержни и дополнительные индукционные преобра- зователи У.
Датчики 3 и 7 индукционного типа состоят из статора и ротора, причем статор первого датчика угла жестко закреплен на оси подвеса, а ротор име ет пазы для боковых стержней; статоры дополнительных . датчиков угла жестко закреплены на поперечном стержне 6, а роторы - на боковых стержнях 5, при этом обмотки роторов соединены между собой последовательно и встречно и через усилитель с обмоткой ротора первого датчика угла - последователь- но, Первьш датчик 3 угла расположен внутри прорезей верхних концов боковы стержней, при этом на одной стороне прорези обоих боковых стержней 5 имеется зубчатая рейка, входяцая с зубчатым колесом, пра1даю1цимся на оси подве
ля ющая ускорения компенсируется введением дополнительной электрической цепи. Для этого в местах шарнирного крепления боковых стержней с поперечным установлены дополнительно два индукционных датчика угла, статоры которых жестко закреплены на поперечном стержне, а обмотки роторов, жестко закрепленных на боковых стержнях, соединены последовательно и встречно и через усилитель - с обмоткой ротора датчика угла подвеса, 3 ил.
с д
с
0
5
са 2, в зацепление, допускающее поступательное перемещение обоих боковых стержней относительно оси подвеса одновременно только в разные стороны.
Маятниковый датчик работает следующим образом.
При наклоне корпуса подвижного объекта на угол об ,(Фиг,2) центр тяжести треугольника соЬ раняет свое вертикальное положение, при этом треугольник сохраняет свою форму. Маятник, поворачиваясь относительно оси подвеса, поворачивает ротор первого датчика угла относительно статора. Формируется электрический сигнал, прог порциональный углу иС . Так как форма треугольника не меняется и боковые стержни относительно поперечного стержня в шарнирах не проворачиваются, то выходной сигнал с дополнительных -датчиков угла равен нулю. Суммарный сигнал трех датчиков равен выходному сигнапу первого датчика угла, т.е. выходной сигнал устройства соответствует углу наклона подвижного объекта.
При действии ускорения центр тяжести треугольника стремится остаться на месте, что вызывает изменение фор-. мы треугольника за счет изменения величины плеч маятника. Действукицее в плоскости маятника ускорение разложим на две составляющие: вертикаль- ную и горизонтальную. Эти ускорения вызьшают появление сил инерции соответственно левого и правого бокового стержня.
Рассмотрим работу датчика при действии вертикальной составляющей ускорения и отсутствии наклона. В этом случае под действием составляющих сил инерции поступательные перемещения боковых стержней относительн точки подвеса должны быть в одну сторону - вниз. Но эти перемещения н позволяет выполнить зубчатая передач т.е. зубчатые рейки боковых стержней входя одновременно -в зацепление с зубчатым колесом, стремятся повернут его в разные стороны и остаются на месте. Следовательно, форма треугольника не изменяется, выходные сигналы дополнительных датчиков угла равны нулю. Действующие силы равны по величине, но противоположны относительно подвеса, поэтому они взаимоуничтожа- ются и поворот маятника относительно оси подвеса не происходит. Выходной сигнал первого датчика угла равен нулю..
Таким образом, суммарный сигнал маятникового датчика равен нулю, т.е. он оказывается нечувствительным к вертикальной составляющей ускорени точки подвеса.
При действии горизонтальной составляющей ускорения и отсутствии наклона подвижного объекта девый стержень перемещается вверх и его плечо уменьшается, а правый стержень перемещается вниз и его плечо увеличивается. Под действием составляющих сил инерции маятник поворачивается относительно подвеса, ротор поворачивается относительно статора и на выходе первого датчика угла появляется сигнал. Но это ложньш сигнал, так как наклона подвижного объекта нет..
Одновременно в связи с изменением формы треугольника угол в точке А увелич 1вается, а в точке В уменьшается, следовательно, дифференцированный сигнал с дополнительных датчиков
yi jia после вычитается из сигнала первого датчика углп. На выходе маятникового датчика суммарный сигнал равен нулю.
При наличии наклона подвижного объекта и ускорения на всех трех датчиках формируется электрический сигнал, но на первом датчике угла он больше по величине, чем дифференциальный сигнал с дополнительных дат- . чиков угла, поэтому суммарный сигнал на выходе маятникового датчика дает информацию об угле наклона подвижного объекта.
Следовательно, на точность измерения угла наклона пoдв шнoгo объекта не влияет наличие горизонтальной составляющей ускорения точки подвеса.
Формула изобретения
Маятниковый датчик угла наклона подвижного объекта, содержащий два
боковых и поперечный подвешенные
стержни, шарниры, пружины и блок преобразования угла наклона и электрический сигнал, отличающийся тем, что, с целью повьш1ения точности
за счет уменьшения влияния ошибок, обусловленных действием ускорения, два боковых стержня подвешены на общем шарнире, выполненном с зубчатым колесом, конец каждого из боковых
стержней со стороны общего шарнира
выполнен с продольной прорезью, внеш- няя по отношению к шарниру сторона которой выполнена в виде зубчатой рейки, сопряженной с зубчатым колесом,
пружина расположена вдоль каждой из продольных прорезей с обеих сторон от общего шарнира, а каждый из шарниров выполнен в .виде первичного преобазователя угла поворота.
cpus.2
| 0 |
|
SU319146A1 | |
| Устройство для определения углов наклона подвижных объектов | 1984 |
|
SU1203360A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
