ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
[01] Настоящая заявка относится к и имеет приоритет по временной патентной заявке США № 61/326876, зарегистрирована 22 апреля 2010 г., включено в виде ссылки в настоящей заявке, как если полностью изложено в данном документе.
ОБЛАСТЬ ТЕХНИКИ
[02] Настоящее изобретение, в общем, относится к методикам обработки почты и посылок.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
[03] Необходимо создание улучшенных и более эффективных систем для разгрузки предметов из контейнера или автоприцепа.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[04] Различные раскрытые варианты осуществления изобретения включают в себя автоматизированное устройство разгрузки, систему и способ. В одном варианте осуществления автоматизированное устройство разгрузки, используемое для контейнера с множеством предметов, размещенных на подстилающей ленте, включает в себя рампу, конвейер, стабилизирующую штабель штору и натяжной механизм. Рампа выполнена с возможностью ввода под подстилающую ленту. Конвейер выполнен с возможностью удаления первого предмета из множества предметов. Стабилизирующая штабель штора выполнена с возможностью удержания второго предмета из множества предметов во время удаления первого предмета. Натяжной механизм выполнен с возможностью соединения с подстилающей лентой и поддержания необходимого натяжения подстилающей ленты во время ввода носовой рампы под подстилающую ленту и удаления первого предмета.
[05] В другом варианте осуществления автоматизированная система разгрузки, используемая для контейнера с множеством предметов, размещенных на подстилающей ленте, включает в себя пульт оператора, контроллер и автоматизированное устройство разгрузки. Контроллер снабжен связью с пультом оператора, и автоматизированное устройство разгрузки снабжено связью с контроллером. Автоматизированное устройство разгрузки включает в себя раму, конвейер, стабилизирующую штабель штору и натяжной механизм. Рампа выполнена с возможностью ввода под подстилающую ленту. Конвейер выполнен с возможностью удаления первого предмета из множества предметов. Стабилизирующая штабель штора выполнена с возможностью удержания второго предмета из множества предметов во время удаления первого предмета. Натяжной механизм выполнен с возможностью соединения с подстилающей лентой и поддержания необходимого натяжения подстилающей ленты во время ввода носовой рампы под подстилающую ленту и удаления первого предмета. Контроллер выполнен с возможностью управления работой автоматизированного устройства разгрузки в ответ на действия оператора на пульте оператора.
[06] В еще одном варианте осуществления способ разгрузки предметов из контейнера с множество предметов, размещенных на подстилающей ленте, включает в себя перемещение рампы автоматизированного устройства разгрузки под подстилающую ленту и первый предмет из множества предметов. Способ также включает в себя установку в нужное положение стабилизирующей штабель шторы автоматизированного устройства разгрузки для удержания второго предмета из множества предметов. Способ дополнительно включает в себя удаление первого предмета из множества предметов с использованием конвейера автоматизированного устройства разгрузки. Способ также включает в себя поддержание необходимого натяжения подстилающей ленты с использованием натяжного механизма во время ввода носовой рампы под подстилающую ленту и удаления первого предмета.
[07] Выше весьма широко изложены признаки и технические преимущества настоящего изобретения, так что специалист в данной области техники может лучше понять подробное описание, приведенное ниже. Дополнительные признаки и преимущества изобретения, образующие предмет формулы изобретения, описаны ниже в данном документе. Специалисту в данной области техники должно быть ясно, что можно легко использовать раскрытые концепцию и конкретные варианты осуществления как основу для модификаций или разработки других конструкций для осуществления целей, аналогичных настоящему изобретению. Специалист в данной области техники должен также понимать, что такие эквивалентные конструкции не отходят от сущности и объема изобретения в его самой широкой форме.
[08] Перед представлением приведенного ниже подробного описания можно предпочтительно изложить значения некоторых слов или фраз, использованных повсеместно в данном патентном документе: термины «включать в себя» и «содержать», а также их производные, означают включение в состав без ограничений; термин «или» является инклюзивным, означающим и/или; фразы «связан с» и «связан с этим», а также их производные могут означать «включает в себя», «включен в», «взаимно соединен с», «содержит», «содержится в», «присоединен к» или «соединен с», «прицеплен к или сцеплен с», «выполнен со связью с», «взаимодействует», «перемежается», «размещается рядом», «находится вблизи», «привязан к» или «имеет связь с», «иметь», «иметь свойство» или т.п.; и термин «контроллер» означает любое устройство, систему или ее часть, управляющую, по меньшей мере, одной операцией, в случае если такое устройство включено в состав агрегатного обеспечения, встроенных программ, программного обеспечения или некоторых комбинаций, по меньшей мере, двух указанных позиций. Следует отметить, что функциональность, связанная с любым конкретным контроллером, может быть централизованной или распределенной или локально или дистанционно. Значения конкретных слов и фраз приводятся по всему данному патентному документу, и специалист в данной области техники должен понимать, что такие значения применяются во многих, если не в большинстве случаев к известному, а также будущему использованию таких определенных слов и фраз. Хотя некоторые термины могут включать в себя широкое разнообразие вариантов осуществления, прилагаемая формула изобретения может явным образом ограничивать данные термины рамками конкретных вариантов осуществления.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[09] Для более полного понимания настоящего изобретения и его преимуществ приведено следующее описание со ссылками на прилагаемые чертежи, на которых одинаковые позиции соответствуют одинаковым предметам и на которых показано следующее.
[10] На фиг.1 показана блок-схема системы обработки данных, в которой вариант осуществления изобретения можно реализовать.
[11] На фиг.2 показана схема автоматизированного устройства разгрузки согласно изобретению.
[12] На фиг.3 показана автоматизированная система разгрузки согласно изобретению.
[13] На фиг.4 показана детальная схема автоматизированного устройства разгрузки фиг.2.
[14] На фиг.5 показана схема второго автоматизированного устройства разгрузки согласно изобретению.
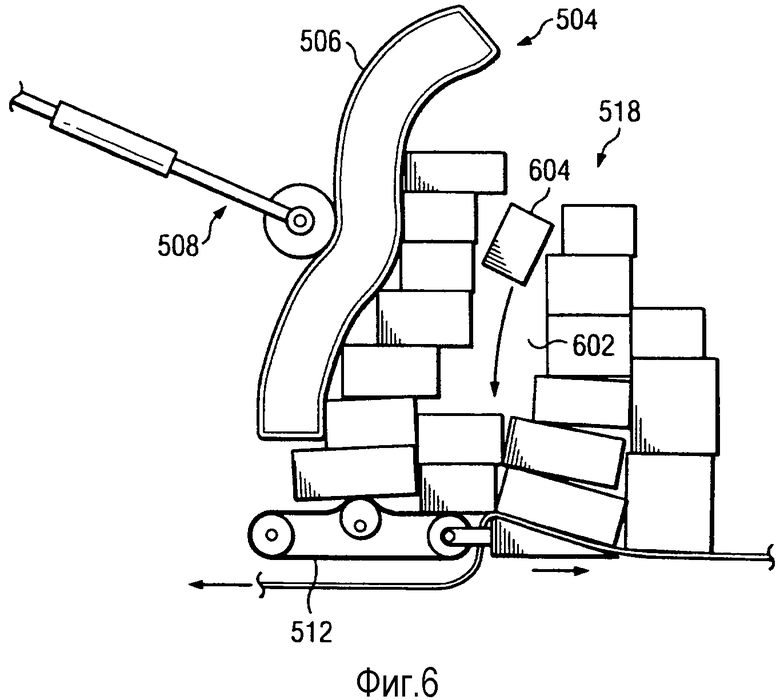
[15] На фиг.6 показана детальная схема механизма стабилизирующей штабель шторы согласно изобретению.
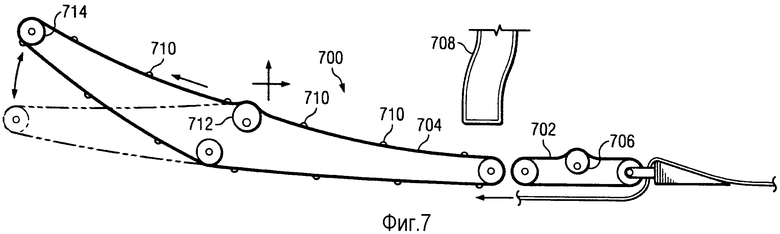
[16] На фиг.7 показана схема рампового конвейера согласно изобретению.
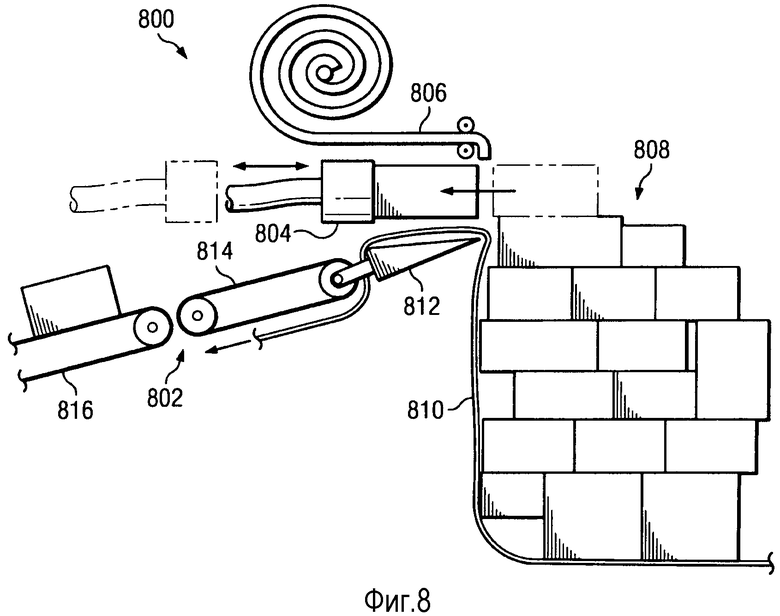
[17] На фиг.8 показана схема другого автоматизированного устройства разгрузки согласно изобретению.
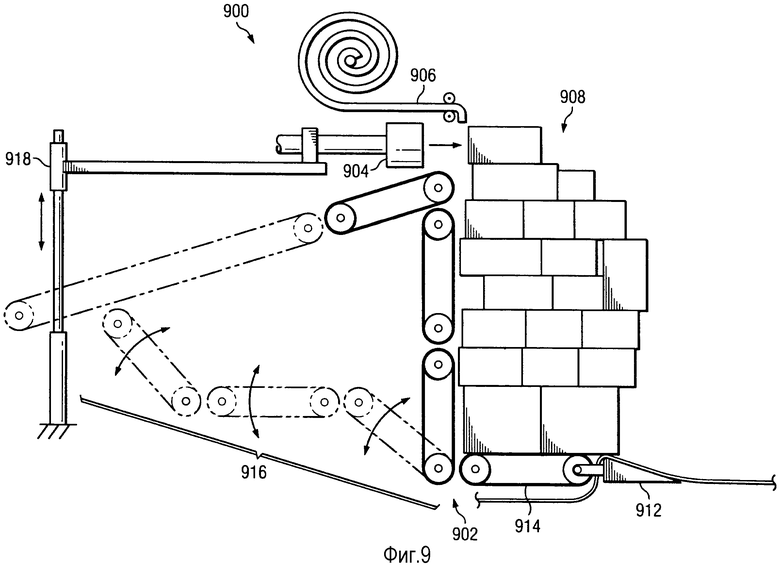
[18] На фиг.9 показана схема еще одного автоматизированного устройства разгрузки согласно настоящему изобретению.
ПОДРОБНОЕ ОПИСАНИЕ
[19] На фиг.1-9 показаны и рассмотрены ниже различные варианты осуществления, использующиеся для описания принципов настоящего изобретения в данном патентном документе только в качестве иллюстрации, которые не должны никоим образом ограничивать объем изобретения. Специалист в данной области техники должен понимать, что принципы настоящего изобретения можно реализовать в любом, выполненном надлежащим образом устройстве. Многочисленные признаки новизны настоящей заявки описаны ниже со ссылкой на являющиеся примерами, неограничивающие варианты осуществления изобретения.
[20] Для увеличения интенсивности нагрузки и уменьшения стоимости транспортировки автотранспортные компании могут использовать практику, называемую «загрузка на платформу». Автоприцеп можно загружать предметами широкого диапазона размеров, весов и форм. Мешки и предметы, имеющие экстремальные отношения ширины к высоте или предельные веса, в общем, грузят на платформу в последнюю очередь, в отдельную зону автоприцепа или коробчатой платформы. На полном автоприцепе такие вещи с предельными параметрами можно располагать вблизи двери автоприцепа, и их должны разгружать первыми.
[21] Ручная разгрузка автоприцепа с загрузкой на платформу может являться изнурительной работой, которую можно выполнять при экстремальных температурах за относительно низкую плату. Персонал, разгружающий стандартные упаковки с помощью выдвижного конвейера, может достигать установившейся производительности в диапазоне 1000 предметов в час. Мешки и предметы нестандартного размера/формы, в общем, выгружаются с гораздо меньшей производительностью, чем стандартные упаковки. Такая уменьшенная производительность часто составляет 200-500 предметов в час в зависимости от веса, формы, конфигурации двери и других факторов. Время, требующееся для погрузки или разгрузки автоприцепа, прямо влияет на использование/производительность двери погрузочно-разгрузочной платформы и поэтому на размер сооружения. Проблемы, возникающие при известных попытках автоматизированной разгрузки автоприцепов, включают в себя стоимость решения, потерю кубатуры, модификацию парка автоприцепов, коэффициент использования, укомплектование персоналом, размер/тип/форматы упаковки, ограничения по загрузке, повреждение упаковки, удобство в работе/автоматизацию, стоимость эксплуатации и возможность дооборудования существующих сооружений с погрузоразгрузочными платформами.
[22] Различные раскрытые варианты осуществления изобретения включают в себя разгрузку предметов из автоприцепа или другого контейнера, в общем, без вмешательства оператора. Носовая рампа автоматизированного устройства разгрузки перемещается под подстилающую ленту в автоприцепе и под первый предмет из множества предметов в автоприцепе. По мере продвижения рампы предмет перемещается на конвейер, выполненный с возможностью транспортировки предмета из автоприцепа. Стабилизирующая штабель штора удерживает остающиеся предметы в штабеле или укладке во время и после удаления первого предмета. Натяжной механизм поддерживает необходимое натяжение подстилающей ленты при перемещении рампы под подстилающую ленту и первый предмет.
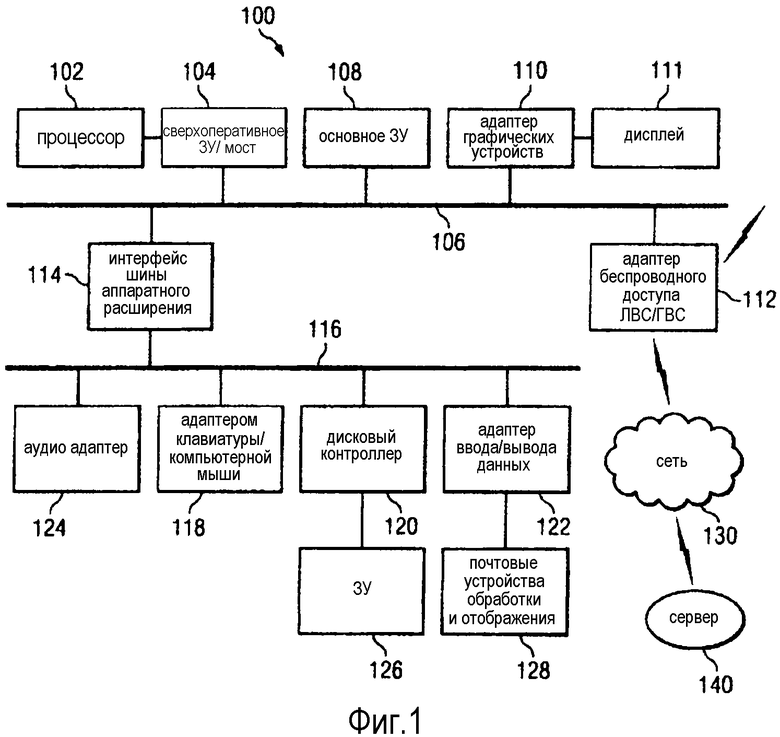
[23] На фиг.1 показана блок-схема системы 100 обработки данных, в которой можно реализовать вариант осуществления изобретения, например, как системы управления для механизма, описанного ниже, и которой можно придать конфигурацию для выполнения способов, описанных в данном документе. Показанная система обработки данных включает в себя процессор 102, соединенный со сверхоперативным ЗУ/мостом 104 уровня два, соединенный, в свою очередь, с локальной системной шиной 106. Локальная системная шина 106 может являться, например, локальной шиной соединения периферийных устройств. Также с локальной системной шиной в показанном примере соединены основное запоминающее устройство 108 и адаптер 110 графических устройств. Адаптер 110 графических устройств может соединяться с дисплеем 111.
[24] Другие периферийные устройства, такие как локальной вычислительной сети (ЛВС)/глобальной вычислительной сети (ГВС)/беспроводной (например, беспроводного доступа) адаптер 112, могут также соединяться с локальной системной шиной 106. Интерфейс 114 шины аппаратного расширения соединяет локальную системную шину 106 с шиной 116 ввода/вывода данных. Шина 116 ввода/вывода данных соединяется с адаптером 118 клавиатуры/компьютерной мыши, дисковым контроллером 120 и адаптером 122 ввода/вывода данных. Дисковый контроллер 120 может соединяться с запоминающим устройством 126, которое может являться любым подходящим, приемлемым для машины или машиночитаемым носителем, включающим в себя, но без ограничения этим, энергонезависимые, типа жестко заданных, носители, такие как постоянные запоминающие устройства (ПЗУ) или стираемые, электронно-программируемые постоянные запоминающие устройства (ЭСППЗУ), запоминающие устройства с магнитной лентой и записываемые пользователем носители, такие как дискеты, жесткие диски и постоянные запоминающие устройства на жестком диске (ПЗУ на компакт-диске) или универсальные цифровые диски (цифровые видеодиски) и другие известные оптические, электронные или магнитные запоминающие устройства.
[25] Адаптер 122 ввода/вывода данных может соединяться с почтовыми устройствами 128 обработки и отображения данных, описанными в данном документе, для отображения, сканирования, транспортировки, маркирования, адресования, сортировки и другой обработки почтовых отправлений согласно различным вариантам осуществления, описанным в данном документе.
[26] Также с шиной 116 ввода/вывода данных соединяется в показанном примере аудиоадаптер 124, с которым могут соединяться динамики (не показано) для воспроизведения звуков. Адаптер 118 клавиатуры/компьютерной мыши обеспечивает соединение для указательных устройств (не показано), таких как компьютерная мышь, шаровой указатель, устройство наведения курсора и т.д.
[27] Специалисту в данной области техники должно быть ясно, что агрегатное обеспечение, показанное на фиг.1, может отличаться для конкретных вариантов реализации. Например, другие периферийные устройства, такие как оптический дисковод и т.п., также можно использовать в дополнение к или вместо показанного агрегатного обеспечения. Показанный пример дан только для объяснения и не предназначен для ограничения архитектуры в настоящем изобретении.
[28] Система обработки данных согласно варианту осуществления настоящего изобретения включает в себя операционную систему с графическим интерфейсом пользователя. Операционная система обеспечивает присутствие многочисленных окон на экране дисплея в графическом интерфейсе пользователя одновременно, где каждое из окон на экране дисплея обеспечивает связь для различных приложений или различных вариантов одного приложения. Курсором в графическом интерфейсе пользователя можно манипулировать с помощью указательного устройства. Положение курсора можно изменять и/или нажимать на кнопку компьютерной мыши для включения необходимого ответного действия.
[29] Можно использовать одну из имеющихся в продаже различных операционных систем, таких как версия Microsoft Windows™, продукт Microsoft Corporation, Redmond, Wash, с соответствующей модификацией. Операционную систему модифицируют или создают согласно настоящему изобретению.
[30] Беспроводной адаптер 112 ЛВС/ГВС может соединяться с сетью 130 (не являющейся частью системы 100 обработки данных), которая может являться любой открытой или закрытой сетью системы обработки данных или комбинацией сетей, известных специалисту в данной области техники, включающей в себя интернет. Беспроводной адаптер 112 ЛВС/ГВС может также связываться с упаковками, как описано в данном документе, и выполнять другие процессы в системе обработки данных или серверные процессы, описанные в данном документе. Система 100 обработки данных может осуществлять связь по сети 130 с одной или несколькими серверными системами 140, которые также не являются частью системы 100 обработки данных, но могут быть реализованы, например, как отдельная система 100 обработки данных. Серверная система 140 может являться, например, центральной серверной системой в центральном пункте обработки почты.
[31] На фиг.2 показана схема автоматического устройства 200 разгрузки согласно настоящему изобретению. Автоприцеп 202 установлен рядом с погрузочно-разгрузочной платформой 204 и дверным проемом 206 платформы для разгрузки. В автоприцеп 202 загружены предметы 208, подлежащие разгрузке с помощью автоматического устройства 200 разгрузки. Предметы 208 установлены на подстилающей ленте 210, первый конец которой прикреплен к автоприцепу в точке 212 прикрепления. Второй конец подстилающей ленты 210 (противоположный первому концу) может быть поднят в первое промежуточное положение 214 для создания поддержки уложенных в штабель предметов во время перевозки для предотвращения падения штабеля. Второй конец подстилающей ленты 210 может альтернативно устанавливаться во второе промежуточное положение (не показано на фиг.2) на полу автоприцепа 202, где подстилающая лента 210 может скатываться или собираться во время перевозки. Как из первого, так и второго промежуточного положения для начала разгрузки автоприцепа 202 второй конец подстилающей ленты 210 проводят, в общем, по пути, указанному стрелкой 216, для прикрепления к автоматическому устройству 200 разгрузки, описанному более подробно ниже.
[32] Устройство 200 разгрузки устанавливает перед открытой дверью автоприцепа 202 оператор с пульта 218 оператора. Оператор может использовать видеокамеру (не показано на фиг.2), установленную на устройстве 200 разгрузки или погрузочно-разгрузочной платформе 204 и представляющую оператору вид устройства 200 разгрузки и автоприцепа 202. Устройство разгрузки включает в себя механизм 220 установки в нужное положение, дистанционно управляемый оператором для установки устройства 200 разгрузки на входе в автоприцеп 202. Механизм 220 установки в нужное положение может иметь поворотный шкворень с приводом или представлять собой другой механизм, подходящий для установки устройства 200 разгрузки в нужное положение относительно автоприцепа 202 перед началом процесса разгрузки или во время процесса разгрузки. Механизм 220 установки в нужное положение выполнен с возможностью установки устройства 200 разгрузки, по меньшей мере, вдоль продольной оси автоприцепа 202 или по горизонтали относительно автоприцепа 202. В некоторых вариантах осуществления устройство 200 разгрузки имеет, по существу, одинаковую ширину с внутренним объемом автоприцепа 202, так что устройство 200 разгрузки, по существу, перекрывает автоприцеп 202 от одной боковой стенки до другой боковой стенки.
[33] Устройство 200 разгрузки также включает в себя стабилизирующую штабель штору 222, установленную на механизме 224 установки в нужное положение. Работа стабилизирующей штабель шторы 222 и механизма 224 установки в нужное положение описана более подробно ниже и показана на фиг.5 и 6. Устройство 200 разгрузки соединяется с выдвижным конвейером 226, который выполнен с возможностью перемещения предметов, разгружаемых устройством 200 разгрузки из автоприцепа 202. Датчик 250 может быть установлен на месте, обеспечивающем обнаружение датчиком 250 предметов, на устройстве 200 разгрузки или выдвижном конвейере 226. Датчик 250 выполнен с возможностью обнаружения маркировки, радиометки, штрих-кода или других идентификационных элементов таких предметов.
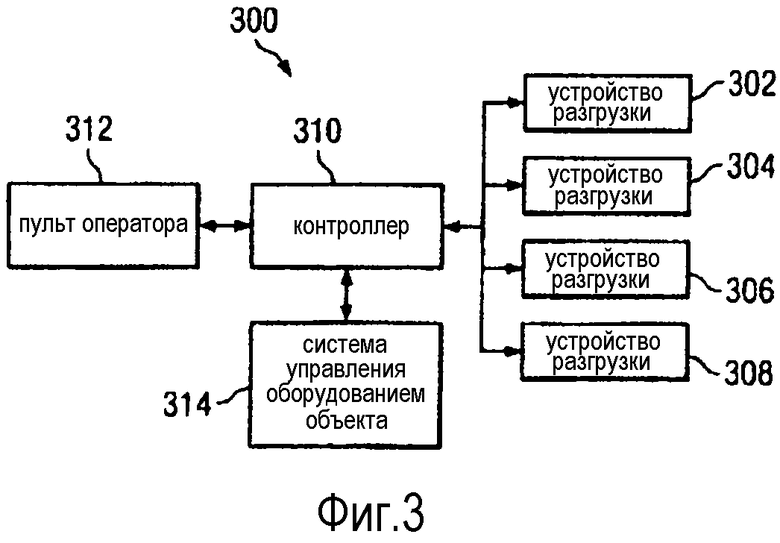
[34] На фиг.3 показана автоматизированная система 300 разгрузки согласно изобретению. Устройствами 302, 304, 306 и 308 разгрузки согласно изобретению управляет контроллер 310. Каждое из устройств 302-308 разгрузки может быть установлено на каждой из четырех погрузочно-разгрузочных платформ для грузовиков, и можно работать, разгружая четыре автоприцепа отдельно или одновременно. Оператор может использовать пульт 312 оператора для управления устройствами 302-308 разгрузки. Контроллер 310 может быть связан с системой 314 управления оборудованием объекта. Контроллер 310 может принимать адресную или идентификационную информацию, обнаруживаемую на разгружаемых предметах одним или несколькими устройствами 302-308 разгрузки, и отправлять информацию в систему 314 управления оборудованием объекта (или в другую внешнюю систему) для использования в направлении предметов к месту назначения.
[35] Хотя пульт 312 оператора, контроллер 310 и система 314 управления оборудованием объекта показаны на фиг.3 как отдельные элементы автоматизированной системы 300 разгрузки, должно быть понятно, что в других вариантах осуществления данная функциональность указанных элементов может быть создана в одном или двух элементах. В некоторых вариантах осуществления автоматизированная система 300 разгрузки также включает в себя один или несколько датчиков (не показано на фиг.3), передающих вид одного или нескольких устройств 302-308 разгрузки и одного или нескольких соответствующих автоприцепов или других контейнеров. В таких вариантах осуществления контроллер 310 дополнительно выполнен с возможностью управления механизмом установки в нужное положение устройства разгрузки для установки устройства разгрузки в нужное положение относительно автоприцепа перед началом процесса разгрузки.
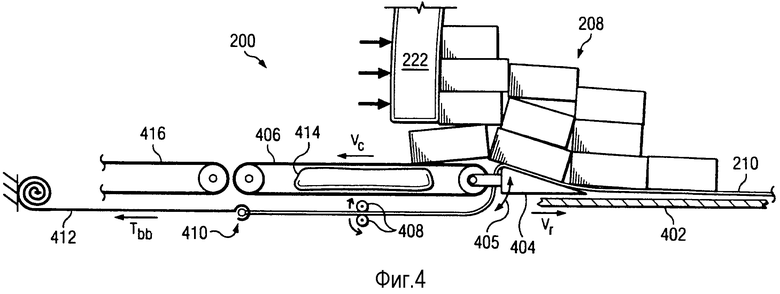
[36] На фиг.4 показана подробная схема системы 200 автоматического устройства разгрузки. Подстилающая лента 210 проложена по носовой рампе 404, между носовой рампой 404 и носовым конвейером 406 через прижимающие ролики 408 и соединяется соединительным устройством 410 с натяжным роликом 412. Прижимающие ролики 408 и натяжной ролик 412 представляют собой натяжной механизм для подстилающей ленты 210. Носовая рампа 405 может поворачиваться вокруг горизонтальной оси, как указано стрелкой 405. Натяжной ролик 412 поддерживает необходимое натяжение Tbb на подстилающей ленте 210 с помощью соединительного устройства 410. Устройство 200 разгрузки перемещается вперед под подстилающую ленту 210 и загруженные предметы 208 с использованием прижимающих роликов 408 для протягивания подстилающей ленты 210. В других вариантах осуществления устройств 200 разгрузки перемещается вперед с использованием механизма 220 установки в нужное положение, и натяжной ролик 412 работает, поддерживая подстилающую ленту 210 туго натянутой поверх носовой рампы 404. Натяжной ролик 412 установлен в фиксированном месте относительно погрузочно-разгрузочной платформы 204 для поддержания натяжения Tbb на подстилающей ленте 210 вне зависимости от перемещения устройства 200 разгрузки.
[37] Устройство 200 разгрузки перемещается в автоприцеп вдоль пола 402 автоприцепа, со скольжением носовой рампы 404 под самый задний предмет из предметов 208. С проскальзыванием носовой рампы 404 под предмет, когда предмет остается на подстилающей ленте 210, устройство 200 разгрузки уменьшает вероятность вталкивания носовой рампой 404 предмета в автоприцеп вместо скольжения под него для подъема на носовой конвейер 406. При перемещении вперед устройство 200 разгрузки перемещается со скоростью Vr, по существу, совпадающей со скоростью Vc транспортерной ленты носового конвейера 406. Таким способом предметы 208 перегружаются, по существу, в отсутствие относительного перемещения между основной лентой 210 и носовым конвейером 406. После попадания на носовой конвейер 406 самый нижний, самый задний предмет из предметов 208 перемещается под стабилизирующей штабель шторой 222 из автоприцепа 202 вдоль носового конвейера 406 на раздаточный конвейер 416 к выдвижному конвейеру 226. Верхний участок транспортерной ленты носового конвейера 406 может поддерживаться амортизатором 414 для уменьшения сил удара, действующих на предметы, падающие на носовой конвейер, из числа предметов 208.
[38] Как описано более подробно ниже, стабилизирующая штабель штора 222 может перемещаться к предметам 208 и от них для отделения самого нижнего, самого заднего предмета от любых предметов, опирающихся сверху на него, для обеспечения удаления предмета носовым конвейером 406. Стабилизирующая штабель штора 222 может перемещаться в положение выше над носовым конвейером 406 для обеспечения прохода более крупных предметов под стабилизирующей штабель шторой 222. Стабилизирующая штабель штора 222 может устанавливаться в задней части носового конвейера, дальше от носовой рампы 404, для открытия большего участка носового конвейера 406 для обеспечения опирания более крупного предмета полностью на носовой конвейер 406 и его удаления. Устройство 200 разгрузки выполнено с возможностью удаления различных предметов 208 (например, упаковок, мест нестандартных форм/весов, мешков, контейнеров, рулонов, поддонов и т.д.) из автоприцепа 202 или другого контейнера, как предметов 208, разложенных в определенном порядке, отсортированных по штабелям, так и беспорядочно наваленных кучей.
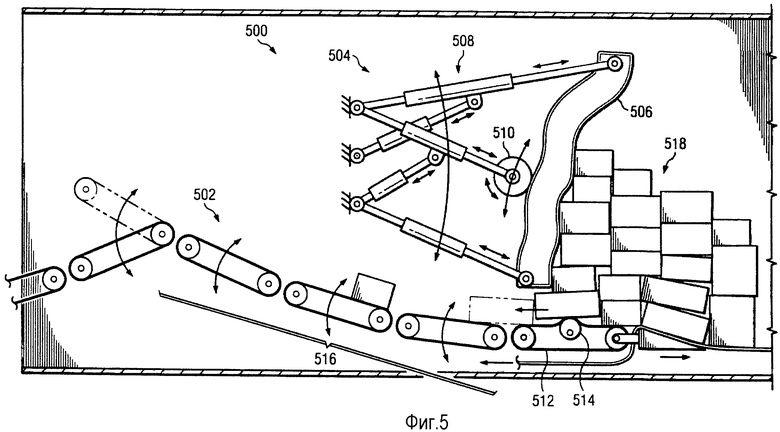
[39] На фиг.5 показана схема другого автоматического устройства 500 разгрузки согласно настоящему изобретению. Устройство 500 разгрузки включает в себя разделенную на секции рампу 502 перемещения и механизм 504 стабилизирующей штабель шторы. Механизм 504 стабилизирующей штабель шторы включает в себя снабженную амортизаторами стабилизирующую штабель штору 506 и один или несколько исполнительных механизмов 508, выполненных с возможностью изменения конфигурации стабилизирующей штабель шторы 506 относительно предметов 518. Исполнительные механизмы выполнены с возможностью независимого перемещения верхней и нижней части стабилизирующей штабель шторы 506 к носу автоприцепа 202 и от него, а также изменения контура стабилизирующей штабель шторы 506 с использованием ролика 510 или другого подходящего исполнительного механизма.
[40] Разделенная на секции механизированная рампа 502 включает в себя носовой конвейер 512 и секции 516 рампового конвейера. Носовой конвейер 512 имеет кулачковый ролик 514, вращающийся на продольной оси, не совпадающей с геометрической продольной осью ролика 514. При вращении ролик 514 поднимает и опускает верхний участок транспортерной ленты носового конвейера 512. Кулачковый ролик 514 работает, сталкивая или иначе нарушая равновесие предметов 518, установленных на носовом конвейере 512 для содействия удалению самого нижнего предмета носовым конвейером 512. Снабженная амортизацией стабилизирующая штабель штора 506, носовой конвейер 512 и секции 516 рампового конвейера регулируют разборку штабеля и уменьшают высоту свободного падения и силу удара, действующую на предметы 518.
[41] Угол наклона и эффект террасирования могут создаваться с помощью секций 516 рампового конвейера. При продвижении разделенной на секции механизированной рампы 502 вглубь штабеля секции 516 рампового конвейера могут подниматься и регулироваться относительно подъемного механизма 504 стабилизирующей штабель шторы для создания потока упаковок между поверхностью разделенной на секции механизированной рампы 502 и нижним краем амортизирующей стабилизирующей штабель шторы 506. При продвижении разделенной на секции механизированной рампы 502 вглубь штабеля предметы удаляются со все более высоких уровней. Секции 516 конвейера включают и выключают для уменьшения сил, действующих между упаковками, и исключения относительного перемещения между конвейером и упаковками, пока не станут необходимыми усилия, развиваемые приводом.
[42] Кулачковый ролик 514 установлен под верхним участком транспортерной ленты носового конвейера 512. Кулачковые ролики можно также устанавливать под верхними участками одной или нескольких секций 516 конвейера содействия созданию потока упаковок. Давление и перекрывание, прикладываемые стабилизирующей штабель шторой 506 к штабелю, сохраняются в приемлемом диапазоне исполнительными механизмами 508 для предотвращения свободного падения упаковки без создания чрезмерных усилий или усилий, которые могут повреждать предметы 518. Различные известные устройства могут обнаруживать уровни давления и давать сигнал о них. Приложение давления на небольшой площади или в одной точке предотвращается благодаря выполнению стабилизирующей штабель шторы 506 из толстого амортизирующего и/или податливого материала, такого как ламинированная пенорезина.
[43] На фиг.6 показана детальная схема механизма 504 стабилизирующей штабель шторы согласно изобретению. Стабилизирующая штабель штора 506 перемещается в необходимую конфигурацию исполнительными механизмами 508. При удалении индивидуальных предметов из нижней части штабеля или укладки предметов 518 в штабеле может создаваться внутренняя полость 602. В случае если предметы находятся в неупорядоченных штабеле или расстановке, такая полость может обеспечивать падение предмета 604 во внутреннюю полость с возможным повреждением предмета 604 или предмета, на который он падает, или создание завала, препятствующего перегрузке следующих предметов 518 из автоприцепа 202. Внутренние полости могут создавать аналогичные проблемы разгрузки в неупорядоченных укладках предметов 518. Благодаря управлению исполнительными механизмами 508 стабилизирующая штабель штора 506 выполнена с возможностью изменения конфигурации для предотвращения образования внутренней полости в штабеле или укладке предметов 518.
[44] На фиг.7 показана схема рампового конвейера 700 согласно настоящему изобретению. Рамповый конвейер 700 включает в себя носовой конвейер 702 и конвейер 704 с изменяемым углом наклона. Рамповый конвейер 700 поддерживает предметы на конвейерных лентах, а не на твердых несущих конструкциях, лежащих в основании. Носовой конвейер 702 включает в себя амортизирующий кулачковый ролик 706, поднимающий и опускающий верхний участок носового конвейера 702, для высвобождения предметов из штабеля или укладки. Стабилизирующая штабель штора 708 удерживает верхние предметы штабеля или укладки и обеспечивает проход одиночных предметов с носового конвейера 702 на конвейер 704 с изменяемым углом наклона. Как можно видеть, сравнивая показанные положения стабилизирующих штабель штор 222, 506 и 708 на фиг.2, 4, 5 и 7, стабилизирующая штабель штора согласно изобретению может перемещаться в многочисленные необходимые положения над носовым конвейером и другими секциями конвейера устройств разгрузки согласно изобретению.
[45] Конвейер 704 с изменяемым углом наклона может включать в себя поднятые планки 710 для предотвращения соскальзывания предметов, находящихся на конвейере 704, обратно к автоприцепу с увеличением угла к горизонтали конвейера 704. Конвейер 704 может включать в себя амортизирующий кулачковый ролик 712 для регулирования скопления и разноса предметов на конвейере 704. Конвейер 704 включает в себя ролик 714, который может подниматься и опускаться для изменения угла к горизонтали верхнего участка конвейера 704 с изменяемым углом наклона. Подвешенная лента конвейера 704 создает щадящую поверхность для предметов, которые транспортирует, для уменьшения их повреждения. Аналогичные результаты можно получить при использовании амортизаторов из пеноматериалов или пневматических камер под верхним участком конвейера 704.
[46] Конвейер 704, в общем, является наклонным, что обуславливает разделение на составные части высоких штабелей предметов под действием силы тяжести. Данное утонение слоев создает естественное отмеривание потока упаковок для облегчения съема с выпуска конвейера 704, в общем, на более узкие раздаточные конвейеры ниже по потоку. На противоположном от носового конвейера 702 конце конвейера 704, угол селективно изменяют для получения клиновидного контакта носового конвейера 702 с предметами штабеля для содействия разделению штабеля на составные части и их удаления. Аналогичные комментарии применимы к наклонной разделенной на секции механизированной рампе 502 устройства 500 разгрузки, показанной на фиг.5.
[47] На фиг.8 показана схема другого автоматического устройства 800 разгрузки согласно настоящему изобретению. Устройство 800 разгрузки включает в себя конвейерный механизм 802, механизм 804 удаления предметов, верхнюю стабилизирующую штабель штору 806 и нижнюю стабилизирующую штабель штору 810. Устройство 800 разгрузки разгружает предметы 808 из верхнего участка штабеля или укладки. Верхний участок может находиться на вершине или вблизи вершины штабеля. Нижняя стабилизирующая штабель штора 810 проходит по носовой рампе 812 и установлена с натяжением для регулирования нижнего участка штабеля предметов 808. Механизм 804 удаления предметов вытягивает индивидуальные предметы из верха штабеля предметов 808 поверх носовой рампы 812 и на носовой конвейер 814, который транспортирует предметы на конвейер 816 отбора. Механизм 804 удаления предметов может иметь вакуумную головку, магнитную головку, крюк или другое подходящее устройство для механического соединения с предметом и вытягивания предмета на носовой конвейер 814. Относительные положения механизма 804 удаления предметов и носовой рампы 812 регулирует разделение штабеля на составные части и минимизирует расстояние свободного падения и получающуюся в результате силу удара. После расчистки верха штабеля предметов 808 конвейерный механизм 802 опускают вниз вдоль торца штабеля. Нижняя стабилизирующая штабель штора 810 сохраняется натянутой для продолжения стабилизации нижнего участка штабеля предметов 808. Механизм 804 удаления предметов механически соединяется с конвейерным механизмом 802 и перемещается с ним при перемещении конвейерного механизма 802 вертикально вдоль штабеля предметов 808 и горизонтально в автоприцеп (или другой контейнер).
[48] При спуске конвейерного механизма 802 вдоль торца штабеля верхняя стабилизирующая штабель штора 806 выдвигается вниз для дополнительной стабилизации штабеля предметов 808 благодаря образованию барьера для предметов, выпадающих из штабеля на носовую рампу 812. Верхняя стабилизирующая штабель штора 806 может устанавливаться дальше вперед, чем нижняя стабилизирующая штабель штора 810, для установки рядом с оставшимися в верхнем участке штабеля предметами 808 и их стабилизации. Когда конвейерный механизм 802 доходит до низа штабеля предметов 808, конвейерный механизм 802 продвигается к торцу оставшейся части штабеля предметов 808. Конвейерный механизм 802 поднимается к верху или в положение вблизи верха штабеля, и разгрузка с помощью механизма 804 удаления предметов возобновляется. Когда конвейерный механизм 802 поднимается, нижняя стабилизирующая штабель штора 810 выдвигается для стабилизации нижнего участка штабеля, и верхняя стабилизирующая штабель штора 806 убирается.
[49] На фиг.9 показана схема другого автоматического устройства 900 разгрузки согласно настоящему изобретению. Устройство 900 разгрузки включает в себя конвейерный механизм 902, вакуумную головку 904 и верхнюю стабилизирующую штабель штору 906. Конвейерный механизм 902 включает в себя носовую рампу 912, носовой конвейер 914 и разделенный на секции конвейер 916 отбора. Носовой конвейер 914 и/или некоторые или все секции разделенного на секции конвейера 916 отбора могут являться амортизирующими, как описано для носового конвейера 406 и показано на фиг.4. Устройство 900 разгрузки разгружает предметы 908 из верхнего участка штабеля или укладки. Верхний участок может являться вершиной или находиться вблизи вершины штабеля. Секции разделенного на секции конвейера 916 отбора вначале поднимаются, по существу, в вертикальную конфигурацию для стабилизации нижнего участка штабеля предметов 908.
[50] Вакуумная головка 904 вытягивает индивидуальные предметы с верха штабеля предметов 908 на самую верхнюю в данный момент секцию разделенного на секции конвейера 916 отбора. Относительные положения вакуумной головки 904 и самой верхней в данный момент секции разделенного на секции конвейера 916 отбора обеспечивают разделение штабеля на составные части и минимизируют расстояние свободного падения и получающуюся в результате силу удара. После расчистки верха штабеля предметов 908 секции разделенного на секции раздаточного конвейера 916 переставляются для уменьшения высоты разделенного на секции конвейера 916 отбора вдоль торца штабеля. Остальные, по существу вертикальные, элементы разделенного на секции конвейера 916 отбора стабилизируют нижний участок штабеля предметов 908. Вакуумная головка 904 механически соединяется с конвейерным механизмом 902 и перемещается с ним, когда конвейерный механизм 902 перемещается горизонтально в автоприцеп (или другой контейнер). Вакуумная головка 904 соединяется с конвейерным механизмом 902 соединительным устройством 918, выполненным с возможностью подъема и спуска вакуумной головки 904.
[51] При перестановке секций разделенного на секции конвейера 916 отбора для уменьшения высоты разделенного на секции конвейера 916 отбора вдоль торца штабеля, верхняя стабилизирующая штабель штора 906 выдвигается вниз для дополнительной стабилизации штабеля предметов 908 с помощью образования барьера, препятствующего падению предметов из штабеля на разделенный на секции конвейер 916 отбора. Верхняя стабилизирующая штабель штора 906 может быть установлена дальше вперед от, по существу, вертикальных элементов разделенного на секции конвейера 916 отбора для установки рядом с остающимся верхним участком штабеля предметов 908 и его стабилизации. Когда вакуумная головка 904 доходит до низа штабеля предметов 908, конвейерный механизм 902 продвигается к торцу участка штабеля оставшихся предметов 908. Вакуумная головка 904 поднимается к верху или в положение вблизи верха штабеля, и разгрузка с помощью вакуумной головки 904 возобновляется. Когда вакуумная головка 904 поднята, секции разделенного на секции конвейера 916 отбора возвращаются по существу в вертикальную конфигурацию для стабилизации нижнего участка штабеля предметов 908, и верхняя стабилизирующая штабель штора 906 убирается.
[52] Специалисту в данной области техники должно быть понятно, что для простоты и ясности полностью структура и работа систем, подходящих для использования с настоящим изобретением, не показана или не описана в данном документе. Вместо этого только физические системы, являющиеся уникальными в настоящем изобретении или необходимыми для понимания настоящего изобретения, показаны и описаны. Остальные конструкции и работа систем, описанных в данном документе, могут соответствовать известной технике и существующей практике.
[53] Важно отметить, что хотя заявка включает в себя описание в контексте полностью функциональной системы, специалисту в данной области техники должно быть ясно, что, по меньшей мере, части механизма настоящего изобретения можно выдавать в виде машиночитаемых инструкций на машиночитаемых носителях в любой из различных форм, и что настоящее изобретение одинаково применимо, вне зависимости от конкретного типа носителя инструкции или сигнала или носителя запоминающего устройства, используемого для фактического выполнения распределения. Примеры машиночитаемых/компьютерных носителей включают в себя: энергонезависимые типа жестко заданных носители, такие как постоянные запоминающие устройства (ПЗУ) или стираемые, электронно-программируемые постоянные запоминающие устройства (ЭСППЗУ), записываемые пользователем носители, такие как дискеты, жесткие диски и постоянные запоминающие устройства на жестом диске (ПЗУ на компакт-диске) или универсальные цифровые диски (цифровые видеодиски). В частности, машиночитаемые носители могут включать в себя промежуточные и непромежуточные носители, если на это не имеется ограничения в прилагаемой формуле изобретения.
[54] Хотя являющийся примером вариант осуществления настоящего изобретения описан подробно, специалист в данной области техники должен понимать, что различные изменения, замены, вариации и улучшения, раскрытые в данном документе, можно выполнять без отхода от сущности и объема изобретения в его самой широкой форме.
[55] Ни одно описание в настоящей заявке не следует читать как означающее, что любой частный элемент, этап или функция является существенным элементом, который должен быть включен в заявленный объем; объем объекта патентования определяется только формулой изобретения. Кроме того, ни один из данных пунктов формулы изобретения не требует применения параграфа шесть 35 USC § 112, если за конкретными словами «средство для» не следует причастия.
Автоматизированное устройство (200) разгрузки включает в себя рампу, конвейер (226), стабилизирующую штабель штору (222) и натяжной механизм. Рампа выполнена с возможностью ввода под подстилающую ленту (210), расположенную в контейнере с грузом. Конвейер выполнен с возможностью удаления первого предмета (208) из груза в контейнере. Стабилизирующая штабель штора выполнена с возможностью удержания второго предмета из множества предметов во время удаления первого предмета. Натяжной механизм выполнен с возможностью соединения с подстилающей лентой и поддержания необходимого натяжения подстилающей ленты. Повышается эффективность устройства. 3 н. и 18 з.п. ф-лы, 9 ил.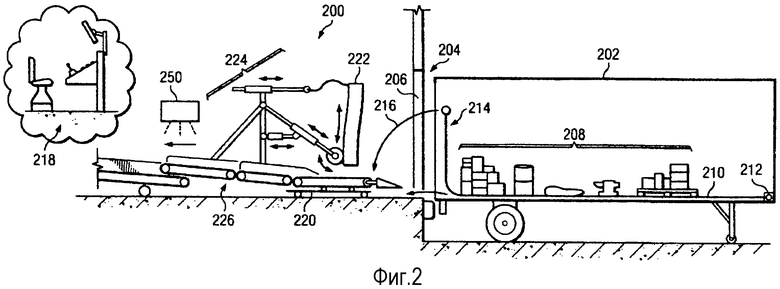
1. Автоматизированное устройство разгрузки для использования с контейнером, имеющим множество предметов, размещенных на подстилающей ленте, содержащее:
рампу, выполненную с возможностью ввода под подстилающую ленту;
конвейер, выполненный с возможностью удаления первого предмета из множества предметов;
стабилизирующую штабель штору, выполненную с возможностью удержания второго предмета из множества предметов во время удаления первого предмета; и
натяжной механизм, выполненный с возможностью соединения с подстилающей лентой и поддержания необходимого натяжения подстилающей ленты во время ввода носовой рампы под подстилающую ленту и удаления первого предмета.
2. Автоматизированное устройство разгрузки по п.1, в котором натяжной механизм дополнительно выполнен с возможностью перемещения рампы под первый предмет.
3. Автоматизированное устройство разгрузки по п.1, в котором стабилизирующая штабель штора дополнительно выполнена с возможностью изменения положения относительно конвейера для обеспечения удаления первого предмета конвейером.
4. Автоматизированное устройство разгрузки по п.1, в котором стабилизирующая штабель штора дополнительно выполнена с возможностью изменения конфигурации относительно множества предметов для предотвращения образования внутренней полости во множестве предметов.
5. Автоматизированное устройство разгрузки по п.1, дополнительно содержащее механизм удаления предметов, выполненный с возможностью вытягивания первого предмета над рампой на конвейер.
6. Автоматизированное устройство разгрузки по п.1, в котором конвейер включает в себя механизм, выполненный с возможностью сталкивания, по меньшей мере, некоторых из множества предметов.
7. Автоматизированное устройство разгрузки по п.1, дополнительно содержащее механизм установки в нужное положение, выполненный с возможностью установки автоматизированного устройства разгрузки относительно контейнера.
8. Автоматизированная система разгрузки для использования с контейнером, имеющим множество предметов, размещенных на подстилающей ленте, содержащая:
пульт оператора;
контроллер, снабженный связью с пультом оператора; и
автоматизированное устройство разгрузки, снабженное связью с контроллером, причем автоматизированное устройство разгрузки автоприцепа, включающее в себя:
рампу, выполненную с возможностью ввода под подстилающую ленту,
конвейер, выполненный с возможностью удаления первого предмета из множества предметов,
стабилизирующую штабель штору, выполненную с возможностью удержания второго предмета из множества предметов во время удаления первого предмета, и
натяжной механизм, выполненный с возможностью соединения с подстилающей лентой и поддержания необходимого натяжения подстилающей ленты во время ввода носовой рампы под подстилающую ленту и удаления первого предмета,
при этом контроллер выполнен с возможностью управления работой автоматизированного устройства разгрузки в ответ на действия оператора на пульте оператора.
9. Автоматизированная система разгрузки по п.8, в которой
автоматизированное устройство разгрузки автоприцепа дополнительно содержит датчик, выполненный с возможностью обнаружения идентифицирующего признака первого предмета, и
контроллер дополнительно выполнен с возможностью передачи информации относительно обнаруженного идентифицирующего признака во внешнюю систему.
10. Автоматизированная система разгрузки по п.8, в которой
автоматизированное устройство разгрузки автоприцепа дополнительно содержит механизм установки в нужное положение, и
контроллер дополнительно выполнен с возможностью перемещения автоматизированного устройства разгрузки автоприцепа в нужное положение относительно контейнера с использованием механизма установки в нужное положение.
11. Автоматизированная система разгрузки по п.8, в которой натяжной механизм дополнительно выполнен с возможностью перемещения рампы под первый предмет.
12. Автоматизированная система разгрузки по п.8, в которой стабилизирующая штабель штора дополнительно выполнена с возможностью изменения положения относительно конвейера для обеспечения удаления первого предмета конвейером.
13. Автоматизированная система разгрузки по п.8, в которой стабилизирующая штабель штора дополнительно выполнена с возможностью изменения конфигурации относительно множества предметов для предотвращения образования внутренней полости во множестве предметов.
14. Автоматизированная система разгрузки по п.8, в которой автоматизированное устройство разгрузки дополнительно включает в себя механизм удаления предметов, выполненный с возможностью вытягивания первого предмета над рампой на конвейер.
15. Автоматизированная система разгрузки по п.8, в которой автоматизированное устройство разгрузки дополнительно включает в себя механизм, выполненный с возможностью сталкивания, по меньшей мере, некоторых из множества предметов.
16. Способ разгрузки предметов из контейнера с множеством предметов, размещенных на подстилающей ленте, содержащий:
перемещение рампы автоматизированного устройства разгрузки под подстилающую ленту и первый предмет из множества предметов;
установку в нужное положение стабилизирующей штабель шторы автоматизированного устройства разгрузки для удержания второго предмета из множества предметов;
удаление первого предмета из множества предметов с использованием конвейера автоматизированного устройства разгрузки; и
поддержание необходимого натяжения подстилающей ленты с использованием натяжного механизма во время ввода носовой рампы под подстилающую ленту и удаления первого предмета.
17. Способ по п.16, дополнительно содержащий перемещение рампы под первый предмет с использованием натяжного механизма.
18. Способ по п.16, дополнительно содержащий изменение положения стабилизирующей штабель шторы относительно конвейера для обеспечения удаления первого предмета конвейером.
19. Способ по п.16, дополнительно содержащий изменение конфигурации стабилизирующей штабель шторы относительно множества предметов для предотвращения образования внутренней полости во множестве предметов.
20. Способ по п.16, в котором удаление первого предмета из множества предметов включает в себя сталкивание, по меньшей мере, некоторых из множества предметов.
21. Способ по п.16, дополнительно содержащий установку в нужное положение автоматизированного устройства разгрузки относительно контейнера с использованием механизма установки в нужное положение.
| US 20090169349 A1, 02.07.2009 | |||
| US 5538391 A, 23.07.1996 | |||
| US 5902089 A, 11.05.1999 | |||
| JP 2001072226 A, 21.03.2001 | |||
| Устройство для перегрузки штучных грузов | 1982 |
|
SU1062154A1 |
| WO 2004050518 A1, 17.06.2004. | |||

