Настоящее изобретение относится к вибрационным гироскопам, принцип которых основан на эффекте Кориолиса, а более конкретно относится к калибровке гироскопа этого типа.
Как и в случае любого измерительного прибора, для вибрационного гироскопа требуется этап калибровки, то есть этап, в течение которого определяют поправки к грубому значению измерения прибора для повышения его точности в зависимости от различных параметров, измеряемых дополнительно, таких как температура, измеренное значение или положение вибрации, применительно к конкретному случаю осесимметричных вибрационных гироскопов, используемых в режиме полного угла (свободной вибрации), чтобы этот измерительный прибор работал корректно.
Обычно вибрационный гироскоп калибруют до использования. Поэтому его можно калибровать, например, при выпуске с завода.
Калибровка гироскопа может сделать возможным получение релевантных значений измерений в течение определенного периода времени. Но с течением времени у таких вибрационных гироскопов обнаруживаются отклонения измерений, которые, в частности, могут быть следствием ухудшения прокалиброванных параметров. В результате возникает вероятность, что после определенного периода времени использования вибрационного гироскопа значения измерений, обеспечиваемые гироскопом, будут искажаться в соответствии с погрешностью ухода в зависимости от температуры или от положения вибрации. В конкретном случае осесимметричных вибрационных гироскопов, используемых в режиме полного угла, изменения отклонения измерения с течением времени, зависящие от положения вибрации, являются одной из главных причин погрешностей прибора.
Поэтому предпочтительно предусматривать реализацию этапа калибровки гироскопа применительно к отклонению этого вида несколько раз в продолжение использования гироскопа. Однако, несмотря на реализацию такого этапа калибровки, гироскоп не может использоваться в качестве точного измерительного прибора.
Настоящее изобретение должно улучшить эту ситуацию.
Согласно первому аспекту настоящего изобретения предложен способ калибровки гироскопа, калибруемого в гироскопической системе, содержащей по меньшей мере четыре вибрационных гироскопа, выполненных с возможностью изменения положения вибрации между множеством положений вибрации;
при этом первое измерение обеспечивают указанным гироскопом, подлежащим калибровке, и второе измерение обеспечивают комбинацией соответствующих измерений от других гироскопов указанной системы, указанные первое и второе измерения выполняют по одной и той же оси измерения;
для калибруемого гироскопа, который вибрирует в одном из положений вибрации, указанный способ калибровки содержит следующие этапы, на которых:
/1/ определяют значение ухода измерения между указанным первым измерением и указанным вторым измерением;
/2/ выдают команду на изменение положения вибрации калибруемого гироскопа на другое положение вибрации из указанного множества положений вибрации и повторяют этап /1/;
/3/ повторяют этап /2/ K раз, при этом K является положительным целым числом; и
/4/ формируют модель ухода в зависимости от положения вибрации калибруемого гироскопа на основе значений ухода, получаемых при повторениях этапа /1/.
Комбинация измерений может быть линейной комбинацией.
В данном случае термин «модель ухода» соответствует моделированию значений ухода (или «значений несоответствия»), влияющих на значения измерений вибрационного гироскопа в зависимости от его положения вибрации.
Следует заметить, что первое измерение и второе измерение могут соответствовать значениям углов или значениям скорости поворота. Вибрационный гироскоп можно использовать в режиме «полного угла», в котором он обеспечивает значения измерений углов, или в режиме «скорости», в котором он обеспечивает значения измерений угловой скорости.
Исходя из порядка выполнения этого способа можно успешно реализовывать этап калибровки вибрационного гироскопа даже в случае, когда гироскопическая система считается непрерывно предоставляющей релевантную гироскопическую информацию.
Благодаря этому этапу калибровки получают модель ухода, на основе которой можно корректировать значения, измеряемые соответствующим вибрационным гироскопом. Эта модель ухода делает возможным соответствие значения ухода измерения положению вибрации гироскопа. Поэтому значение, измеряемое вибрационным гироскопом, который вибрирует в конкретном положении вибрации, можно легко корректировать, учитывая соответствующую погрешность ухода.
При этом модель ухода можно обновлять в любое время и, следовательно, регулярно без искажения информации, предоставляемой гироскопической системой.
Такой способ калибровки основан на вводе в гироскопическую систему дополнительного вибрационного гироскопа относительно количества вибрационных гироскопов, используемых в гироскопической системе для предоставления пользователю гироскопической информации или навигационных показаний. Этот дополнительный гироскоп, связанный с другими гироскопами системы не на стадии калибровки, образует измерительный эталон, делающий возможным измерение погрешностей одного из других гироскопов, который желательно прокалибровать.
Такой способ может быть успешно реализован при использовании дополнительного гироскопа такого же вида, как гироскопы, используемые для предоставления навигационных показаний, то есть с характеристиками, аналогичными характеристикам гироскопов, которые желательно прокалибровать. Поэтому в качестве дополнительного гироскопа нет необходимости вводить более качественный и поэтому более дорогой гироскоп.
Это преимущество основано на том, что осесимметричный вибрационный гироскоп имеет средний уход в продолжение одного поворота положения вибрации, который является более стабильным, больше, чем порядок величины, по сравнению с уходом для любого положения этой вибрации. В результате в течение этапов калибровки способа согласно осуществлению настоящего изобретения необходима идентификация составляющей ухода, которая является зависящей от положения вибрации, при этом ее среднее значение априори считается стабильным и не требующим калибровки.
Такая реализация делает возможной калибровку вибрационного гироскопа с точностью, превышающей более чем в десять раз абсолютную точность дополнительного вибрационного гироскопа, используемого при такой калибровке.
Гироскопическая система может содержать, например, четыре вибрационных гироскопа, из которых три вибрационных гироскопа расположены соответственно по трем ортогональным осям, при этом четвертый вибрационный гироскоп расположен по трисектрисе указанных трех ортогональных осей.
Предпочтительно, чтобы измерения, обеспечиваемые вибрационным гироскопом, для которых была сформирована модель ухода на этапе /4/, корректировались на основе этой модели ухода.
В осуществлении настоящего изобретения также можно получать конкретное значение ухода при выполнении этапа /1/ в течение периода времени, соответствующего изменению положения вибрации калибруемого гироскопа, при этом конкретное значение ухода используют, чтобы прокалибровать масштабный коэффициент калибруемого гироскопа.
В рассматриваемой гироскопической системе измерение, обеспечиваемое калибруемым гироскопом, может быть легко заменено комбинацией измерений от других гироскопов системы, которые не подвергают калибровке. Первое и второе измерения получают по одной и той же оси.
В случае когда гироскопической системой предоставляется навигационная информация на основе соответствующих измерений от набора по меньшей мере трех конкретных вибрационных гироскопов, то во время реализации этапов с /1/ по /4/ относительно калибруемого гироскопа из набора трех гироскопов измерение от калибруемого гироскопа, на основе которого предоставляется навигационная информация, может быть успешно заменено измерением по той же оси измерения, как и для этого гироскопа, подлежащего калибровке, получаемым комбинированием соответствующих измерений от других двух вибрационных гироскопов из этого набора трех гироскопов и от по меньшей мере одного четвертого вибрационного гироскопа.
Далее, по окончании применения способа калибровки согласно осуществлению настоящего изобретения может быть предусмотрен возврат к тройке из первых трех гироскопов, чтобы еще раз подкрепить навигационные показания от гироскопической системы на основании этих первых трех гироскопов.
В последнем случае, когда гироскопы используют в режиме полного угла, а не в режиме скорости, можно представить себе, что способ калибровки также содержит следующие этапы:
/а/ в течение первого периода времени одновременное получение по одной и той же оси измерения первых значений углов калибруемым вибрационным гироскопом и вторых значений углов на основе комбинации измерений, обеспечиваемых соответственно другими гироскопами системы; и получение из них вторых значений углов, измененных путем подгонки нуля отсчета вторых значений и первых значений;
/b/ в течение второго периода времени выполнение этапов с /1/ по /4/ относительно калибруемого гироскопа;
/с/ в течение третьего периода времени получение первых значений углов калибруемым гироскопом и вторых значений углов; и получение из них первых значений углов, измененных путем подгонки нуля отсчета первых значений углов и вторых значений углов.
Исходя из этого порядка действий можно осуществлять поворот положения вибрации вибрационного гироскопа, подлежащего калибровке, продолжая получать релевантные значений измерения углов.
В данном случае предусматривается подгонка нуля отсчета первых значений, обеспечиваемых калибруемым гироскопом, к нулю отсчета вторых значений на основании комбинации измерений, обеспечиваемых другими гироскопами. Если исходить из этого, то на всем протяжении процесса калибровки вибрационного гироскопа можно получать значения углов, находящиеся в соответствии друг с другом. Независимо от того, каким образом получены измеренные значения углов, с помощью калибруемого гироскопа или комбинированием измерений от других гироскопов, предпочтительно, чтобы эти значения углов были изменены с учетом их нулей отсчета, соответствующим образом использованных.
Никаких ограничений на количество положений вибрации, которые можно представить себе, в конфигурации вибрационного гироскопа не предусмотрено.
Однако, если исходить из этого, то измерения, обеспечиваемые рассматриваемой гироскопической системой, могут быть искажены возмущающим воздействием, связанным со сменой измерений, то есть с тем, что навигационные показания, предоставляемые системой, не всегда основываются на одних и тех же вибрационных гироскопах системы.
Чтобы исключить такое возмущающее воздействие, можно предусматривать, чтобы навигационные показания, предоставляемые гироскопической системой согласно осуществлению настоящего изобретения, всегда были основаны на измерениях, получаемых от одного и того же набора вибрационных гироскопов, при этом исключается смена вибрационных гироскопов при получении измерений для учета при выработке навигационных показаний.
В этом случае во время реализации этапов с /1/ по /4/ относительно калибруемого гироскопа из набора из трех гироскопов измерение от калибруемого гироскопа, на основе которого предоставляется навигационная информация, корректируют в зависимости от комбинации измерений, обеспечиваемых другими гироскопами системы, а не калибруемым гироскопом.
Таким образом, навигационные показания всегда могут быть основаны на измерениях, происходящих от одного и того же набора вибрационных гироскопов, при этом гарантируется, что навигационные показания являются релевантными даже во время изменения положения вибрации одного из вибрационных гироскопов в наборе рассматриваемых гироскопов. Фактически в данном случае предпочтительно предусматривать коррекцию измерения, обеспечиваемого вибрационным гироскопом, подвергающимся калибровке, путем выполнения линейного комбинирования измерений, обеспечиваемых другими вибрационными гироскопами, чтобы получать измерение по той же оси измерения, по которой выполняется измерение вибрационным гироскопом, подвергающимся калибровке.
При такой архитектуре калибруемый вибрационный гироскоп можно успешно подвергать воздействию этапа калибровки, на котором искажаются значения измерений, которые он обеспечивает, но на котором не искажаются значения, которые обеспечиваются гироскопической системой, последняя корректирует их, используя комбинацию значений измерений, обеспечиваемых другими гироскопами.
Реализация этапов с /1/ по /4/ относительно набора из трех гироскопов системы может быть последовательной, то есть этапы с /1/ по /4/ применяют последовательно к каждому гироскопу в этом наборе гироскопов, или перекрывающейся, то есть каждый этап с /1/ по /4/ применяют последовательно ко всем по меньшей мере трем гироскопам.
Таким образом, благодаря формированию модели ухода по меньшей мере три гироскопа из набора можно калибровать, применяя этапы с /1/ по /4/ последовательно к каждому гироскопу. Или же благодаря формированию модели ухода эти по меньшей мере три гироскопа из набора можно калибровать, применяя этап /1/ к каждому из гироскопов последовательно, затем этап /2/ к каждому из гироскопов последовательно, затем этап /3/ к каждому из гироскопов последовательно и, наконец, этап /4/ к каждому из гироскопов последовательно.
Чтобы прокалибровать вибрационный гироскоп в этой гироскопической системе, предусматривается формирование модели ухода, связанной со значениями измерений, обеспечиваемыми этим гироскопом, в зависимости от положения вибрации гироскопа, поскольку уход, привязанный к значениям измерений, обеспечиваемым вибрационным гироскопом, представляет собой значение ухода, которое зависит от положения вибрации рассматриваемого вибрационного гироскопа.
В таком случае на основании этой модели ухода значения измерений, обеспечиваемые вибрационным гироскопом, можно корректировать в зависимости от положения вибрации гироскопа.
Повторяя K раз этап /2/ способа калибровки, получают K значений ухода или K значений погрешности ухода предпочтительно соответствующих K различным положениям вибрации, соответственно.
На основании такого ряда дискретных значений предпочтительно получать непрерывную модель ухода, то есть такую, которая делает возможным получение значения погрешности ухода для любого положения вибрации вибрационного гироскопа.
Такую модель ухода в зависимости от положения вибрации можно получать интерполяцией значений ухода, получаемых при повторениях этапа /1/. В данном случае можно предусматривать оценивание или вычисление промежуточных значений в ряде значений ухода, определяемых во время повторений этапа /1/, например, путем применения линейной интерполяции к ряду получаемых значений ухода.
В осуществлении настоящего изобретения модель ухода в зависимости от положений вибрации получают с помощью полиномиального анализа значений ухода, получаемых при повторениях этапа /1/.
Кроме того, можно предусматривать переход от ряда дискретных значений ухода, получаемых при повторениях этапа /1/, к модели погрешности ухода путем выполнения гармонического анализа значений этого ряда на базе ряда Фурье. Такое моделирование является подходящим для вибрационного гироскопа, поскольку физические причины на начальной стадии ухода этого типа для гироскопа, зависящего от положения вибрации, формируют уход синусоидального типа порядка n (при этом n является четным положительным числом) в продолжение одного поворота, а среднее значение этого ухода остается относительно стабильным с течением времени.
Значения измерений относятся к одному измерению из набора измерений, содержащего измерение угла и измерение угловой скорости.
Согласно второму аспекту настоящего изобретения предложена гироскопическая система, пригодная для реализации способа калибровки согласно первому аспекту настоящего изобретения.
Кроме того, дополнительные характеристики и преимущества изобретения станут очевидными при чтении нижеследующего описания. Оно является чисто иллюстративным и должно читаться совместно с сопровождающими чертежами, на которых:
Фиг.1 - иллюстрация основных этапов способа калибровки в гироскопической системе согласно варианту осуществления настоящего изобретения;
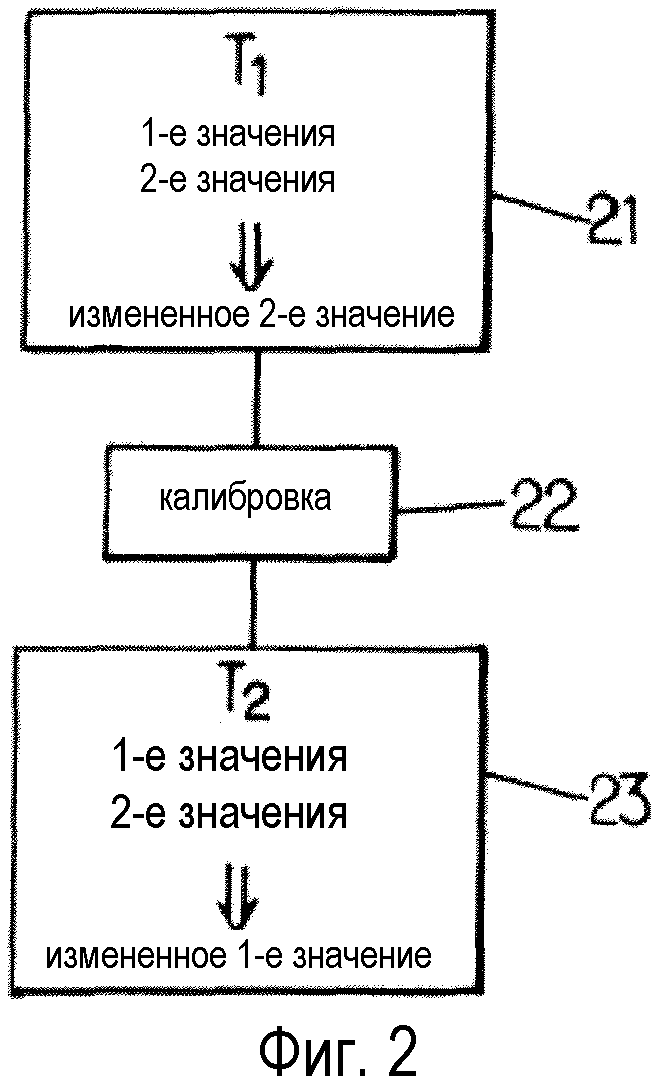
Фиг.2 - иллюстрация реализации способа калибровки в гироскопической системе согласно варианту осуществления настоящего изобретения;
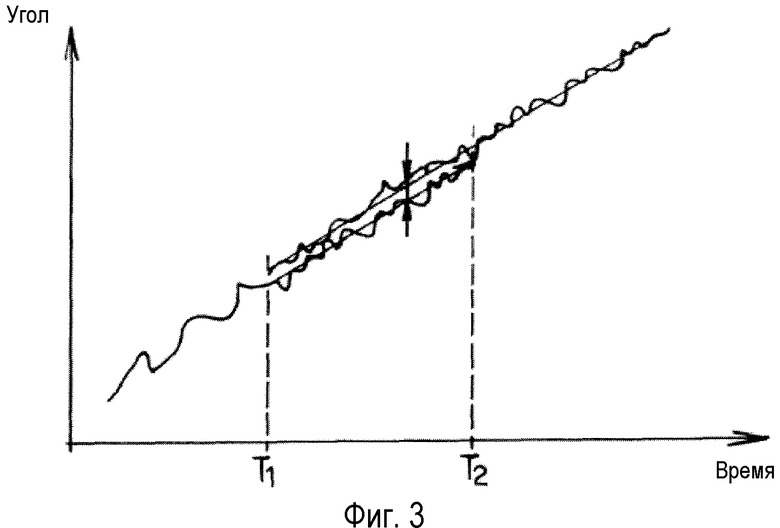
Фиг.3 - иллюстрация изменений значений измерений, обеспечиваемых гироскопической системой согласно варианту осуществления настоящего изобретения;
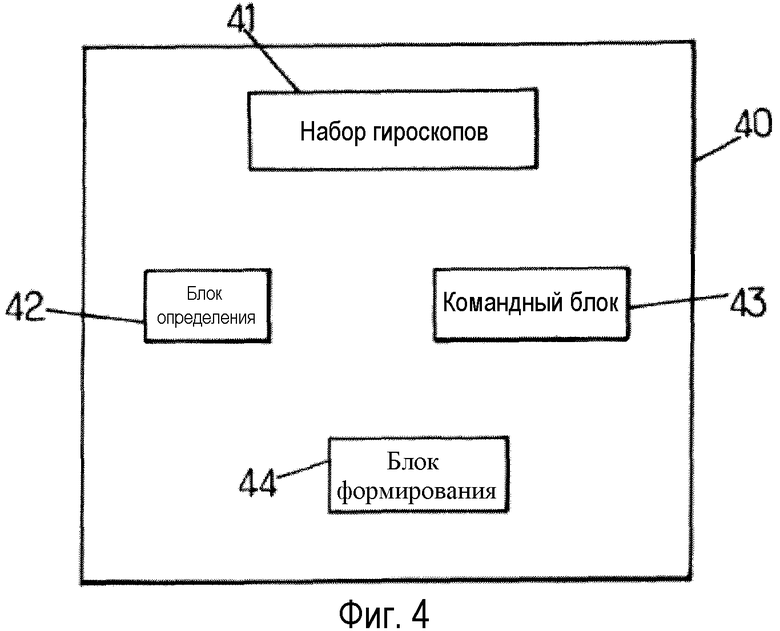
Фиг.4 - иллюстрация гироскопической системы согласно варианту осуществления настоящего изобретения.
Ниже описываются настоящее изобретение и его применение к гироскопам первого типа. Эти гироскопы первого типа соответствуют осесимметричным гироскопам, относящимся к кориолисовым вибрационным гироскопам, таким как, например, полусферические резонаторные гироскопы, описанные в документе “Type I and type II micromachined vibratory gyroscopes”, Andrei M. Shkel, p.586-593, IEEE/ION (Institute of Electrical and Electronics Engineers/Institute of Navigation, PLANS 2006, San Diego, CA. USA).
Эти гироскопы могут работать в разомкнутом контуре, то есть в режиме полного угла. В таком случае они делают возможным измерение абсолютного угла поворота на основе измерения угла, представляющего положение вибрации гироскопа относительно измерительных электродов.
Кроме того, такой гироскоп можно использовать в замкнутом контуре, задавая положение вибрации путем подачи команды прецессии, как это описано, в частности, в документе FR 2755227. В этом случае положение вибрации гироскопа сохраняется в фиксированном положении, а измерение получают из команды, которую необходимо применять к гироскопу, чтобы сохранять это фиксированное положение вибрации. Этот вид работы также называют режимом «скорости». В таком случае значения, получаемые физическим измерением, больше не соответствуют углу, а скорости поворота.
Когда используют режим полного угла, на измерениях, обеспечиваемых этими вибрационными гироскопами, могут сказываться погрешности или значения ухода, которые по существу зависят от положения вибрации относительно измерительных электродов.
Следствием этих погрешностей является снижение уровня точности значений, измеряемых таким образом. Поэтому желательно постараться снизить эти погрешности, чтобы улучшить характеристики вибрационного гироскопа этого типа.
На Фиг.1 показаны основные этапы способа калибровки в гироскопической системе согласно осуществлению настоящего изобретения.
Гироскопическая система, в которой реализуют способ калибровки вибрационных гироскопов, содержит по меньшей мере четыре вибрационных гироскопа. В варианте осуществления три гироскопа из четырех гироскопической системы всегда используют для получения информации о гироскопической системе, при этом четвертый является дополнительным вибрационным гироскопом, предназначенным для получения возможности реализации калибровки одного из других трех без искажения показаний, предоставляемых гироскопической системой. Однако настоящее изобретение также охватывает осуществление, в котором информация, предоставляемая гироскопической системой, поступает от трех гироскопов из четырех, которые не подвергаются калибровке, описанной выше.
Этап 11 соответствует этапу инициализации положения вибрации калибруемого вибрационного гироскопа. Это исходное положение вибрации может соответствовать текущему положению вибрации вибрационного гироскопа в момент времени, в который реализуют способ калибровки. В случае если вибрационный гироскоп уже подвергался калибровке этим способом в течение предшествующего периода времени, то в таком случае это исходное положение вибрации на этапе 11 может быть положением вибрации, достигнутым по окончании последнего повторения этапа /2/ способа калибровки согласно осуществлению настоящего изобретения.
На этапе 11 также предусматривается задание: инициализация переменной i на нулевое значение.
Затем на этапе 12 для текущего положения вибрации вибрационного гироскопа, подвергающегося калибровке, определяют значение ухода измерения. Это значение ухода соответствует разности D между значением измерения, обеспечиваемым вибрационным гироскопом, подвергающимся калибровке, и значением, получаемым на основе комбинации измерений от других гироскопов по той же оси измерения.
На последующем этапе, этапе 13, подают команду на изменение положения вибрации вибрационного гироскопа для перехода на одно из множества других принимаемых во внимание положений вибрации, после чего определяют еще одно значение ухода измерения, точно так же, как и на этапе 12, но относительно нового положения вибрации калибруемого вибрационного гироскопа.
Поэтому по окончании этапа 13 имеют два значения ухода соответственно для двух отдельных положений вибрации вибрационного гироскопа. Чтобы суметь построить модель ухода в зависимости от положения вибрации, которая делает возможным последовательное получение соответствия между положением вибрации и значением ухода, этап 13 повторяют по меньшей мере еще раз. Таким образом, в осуществлении настоящего изобретения модель ухода может быть сформирована на основании по меньшей мере трех значений ухода.
Для этого на этапе 14 число i сравнивают с положительным целым числом K. Выбор значения K основан на компромиссе между сложностью реализации способа, к тому же охватывающей время, которое требуется для этой реализации, и точностью модели ухода, получаемой в конечном счете. Фактически определение большого количества значений ухода является дорогим, но делает возможным получение точной модели ухода.
В случае когда i меньше K, на этапе 16 до повторения этапа 13 значение числа i увеличивают на величину 1. При каждом повторении этого этапа 13 получают новое значение ухода для текущего положения вибрации, как раз для которого подавалась команда на вибрационный гироскоп, подвергающийся калибровке.
Этот этап 13 повторяют до тех пор, пока требование на этапе 14 регулирования не будет удовлетворяться.
По окончании этих повторений этапа 13 имеют (K+2) значений ухода, на основании которых затем можно определить модель ухода.
После этого модель ухода в зависимости от положений вибрации вибрационного гироскопа можно формировать таким образом, чтобы можно было корректировать значения измерений, обеспечиваемые этим гироскопом при любых положениях вибрации. Например, чтобы получить основы непрерывной модели ухода по ряду дискретных значений ухода, к ряду значений ухода, получаемых таким образом, можно применить гармонический анализ или полиномиальный анализ.
В нижеследующих разделах для примера описывается использование настоящего изобретения применительно к калибровке вибрационных гироскопов в инерциальном блоке, содержащем четыре вибрационных гироскопа и обеспечивающем отсчет ориентации носителя.
Этап калибровки содержит изменение положения вибрации калибруемого вибрационного гироскопа. При этом в то время, когда один из четырех вибрационных гироскопов подвергают калибровке, измерения, обеспечиваемые по меньшей мере тремя другими вибрационными гироскопами, используют для коррекции измерения, обеспечиваемого калибруемым вибрационным гироскопом. Поэтому даже в продолжение этапа калибровки гироскопическая система может обеспечивать отсчет ориентации на основе вышеупомянутых трех гироскопов системы.
Операция калибровки состоит из размещения вибрации рассматриваемого вибрационного гироскопа в различных положениях и считывания соответствующего измерения с калибруемого вибрационного гироскопа. После этого достаточно вычесть из этих измерений фактический поворот носителя инерциального блока; этот фактический поворот измеряют другими тремя гироскопами. Затем эту операцию последовательно повторяют для набора вибрационных гироскопов системы, из которых один хотят прокалибровать в соответствии с осуществлением настоящего изобретения.
Калибровку вибрационных гироскопов инерциального блока можно выполнять последовательно следующим образом.
Разность, обозначаемую D, между значением измерения с гироскопа, подвергающегося калибровке, и значением измерения, получаемого по той же самой оси линейным комбинированием измерений с других гироскопов, вычисляют таким образом, чтобы при этом воссоздавалась фиктивная ось измерения, расположенная на одной прямой с осью гироскопа, подвергающегося калибровке. Вычисление этой разности D осуществляют в период времени, когда на калибруемый вибрационный гироскоп подают команду на изменение положения вибрации.
Разность D позволяет точно знать значение угла, на который повернулось положение вибрации, даже в случае, когда масштабный коэффициент, используемый для формирования изменения положения, сам точно не известен. Затем из навигационных вычислений можно вычесть этот явный поворот, измеряемый гироскопом, подвергающимся калибровке.
Это вычисление также выполняют в течение периода времени, когда вибрация в заданном положении отсутствует. Таким образом, подавая команду на изменение положения, положение вибрации можно изменять в соответствии со множеством положений вибрации и значение D регистрировать для каждого положения из множества положений. Это дает значение погрешности измерения вибрационного гироскопа в зависимости от положения вибрации, что делает возможным обновление гармонической модели ухода погрешности.
Такая процедура позволяет использовать те же самые три гироскопа для навигации, при этом поправки вводят путем обновления соответствующей модели ухода и таким образом исключают переходные процессы при коммутации, то есть нестабильности измерений, связанные с изменениями в гироскопах, используемых в гироскопической системе для получения навигационной информации.
В случае значительных перемещений носителя, нарушающих планируемые положения вибрации вибрационного гироскопа, подвергающегося калибровке, можно предпочтительно отменять обновление модели ухода и откладывать его до следующего цикла.
Применяя принципы настоящего изобретения к инерциальному блоку и для калибровки вибрационных гироскопов в этом инерциальном блоке, можно приступать, прозрачным способом, к калибровке в любой момент использования блока. Такая гироскопическая система может обеспечивать отсчет ориентации даже в случае, когда один из вибрационных гироскопов подвергается калибровке в соответствии с осуществлением настоящего изобретения.
На Фиг.2 показана реализация способа калибровки в гироскопической системе в соответствии с вариантом осуществления настоящего изобретения, в котором гироскопы обеспечивают измерения углов и в котором навигационная информация, предоставляемая гироскопической системой, основана на трех из четырех гироскопах, которые не подвергаются калибровке. Поэтому в этом случае они не всегда являются теми же самыми гироскопами, которые используются для получения навигационной информации.
На этапе 21 в течение периода Т1 времени, по одной и той же оси измерения, одновременно обеспечивают первые значения углов калибруемым гироскопом и получают вторые значения углов на основании линейной комбинации измерений, обеспечиваемых другими тремя гироскопами. В таком случае на основании этих двух типов значений углов можно изменять вторые значения углов, чтобы делать их согласованными с первыми значениями углов путем подгонки соответствующего нуля отсчета.
Таким образом, можно гарантировать угловую непрерывность значений измерений, обеспечиваемых калибруемым гироскопом и сочетанием других гироскопов.
На этапе 22 выполняют основные этапы способа калибровки и вместе с тем от других гироскопов получают значения измерений, обеспечиваемые гироскопической системой.
По окончании этой калибровки можно предусматривать продолжение получения значений углов от других гироскопов в течение определенного периода времени или возобновление учета значений углов, получаемых от вибрационного гироскопа, который только что калибровался. Вибрация последнего может быть на предыдущем положении, в котором он вибрировал до выполнения калибровки этого гироскопа, или может быть в другом положении вибрации.
Если решают возобновить учет значений измерений, обеспечиваемых вибрационным гироскопом, который только что калибровался, то на этапе 23 учитывают первые и вторые значения углов, чтобы иметь возможность изменить первые значения углов подгонкой соответствующих нулей отсчета.
На Фиг.3 показаны изменения значений измерений, обеспечиваемых гироскопической системой, в соответствии с осуществлением настоящего изобретения, касающегося реализации способа калибровки, описанного выше при обращении к Фиг.2.
Вариация значений угла, учитываемая в гироскопической системе в соответствии с вариантом осуществления настоящего изобретения, показана в зависимости от времени в процессе выполнения этапов способа измерения.
В данном случае до момента Т1 времени значения угла обеспечиваются калибруемым вибрационным гироскопом. Затем между моментами Т1 и Т2 времени учитывают первые и вторые значения углов для получения измененных вторых значений угла с тем, чтобы подогнать соответствующие нули отсчета.
Поэтому этот период соответствует периоду перекрытия, который используют для достижения достоверности значений углов, используемых в системе с течением времени.
Затем в конце этого периода перекрытия можно подать команду на изменение положения вибрации калибруемого гироскопа. После этого в измерительной системе используют измененные вторые значения измерений.
На Фиг.4 показана гироскопическая измерительная система согласно варианту осуществления настоящего изобретения.
В силу вышеизложенного система 40 содержит по меньшей мере четыре вибрационных гироскопа 41, выполненных с возможностью изменения положения вибрации между множеством положений вибрации, при этом первое измерение обеспечивается калибруемым гироскопом, а второе измерение обеспечивается комбинацией соответствующих измерений от других гироскопов, эти первое и второе измерения выполняют по одной и той же оси измерения.
Кроме того, она содержит:
- блок 42 определения, выполненный с возможностью определять значение ухода измерения между первым измерением и вторым измерением;
- командный блок 43, выполненный с возможностью выдавать команды на изменение положения вибрации калибруемого гироскопа на другое положение вибрации из числа множества положений вибрации и запрашивать определение значения ухода блоком определения; и
- блок 44 формирования, выполненный с возможностью формирования модели ухода в зависимости от положения вибрации калибруемого гироскопа на основе значений ухода, обеспечиваемых блоком определения.
Три вибрационных гироскопа можно расположить по трем ортогональным осям соответственно, а четвертый вибрационный гироскоп по трисектрисе указанных трех ортогональных осей.
Изобретение относится к вибрационным гироскопам. Гироскопическая система содержит по меньшей мере четыре вибрационных гироскопа, выполненных с возможностью изменения положения вибрации. Первое измерение обеспечивается калибруемым гироскопом, и второе измерение обеспечивается комбинацией соответствующих измерений от других гироскопов системы, при этом эти первое и второе измерения выполняются по одной и той же оси измерения. После определения значения ухода измерения между первым измерением и вторым измерением следует команда на изменение положения вибрации калибруемого гироскопа в другое положение вибрации и значение ухода определяется еще раз. Команда на изменение положения вибрации и определение значения ухода повторяется K раз, где K - положительное целое число. Затем на основе полученных значений ухода формируется модель ухода в зависимости от положения вибрации калибруемого гироскопа. Изобретение позволяет повысить точность калибровки. 2 н. и 11 з.п. ф-лы, 4 ил.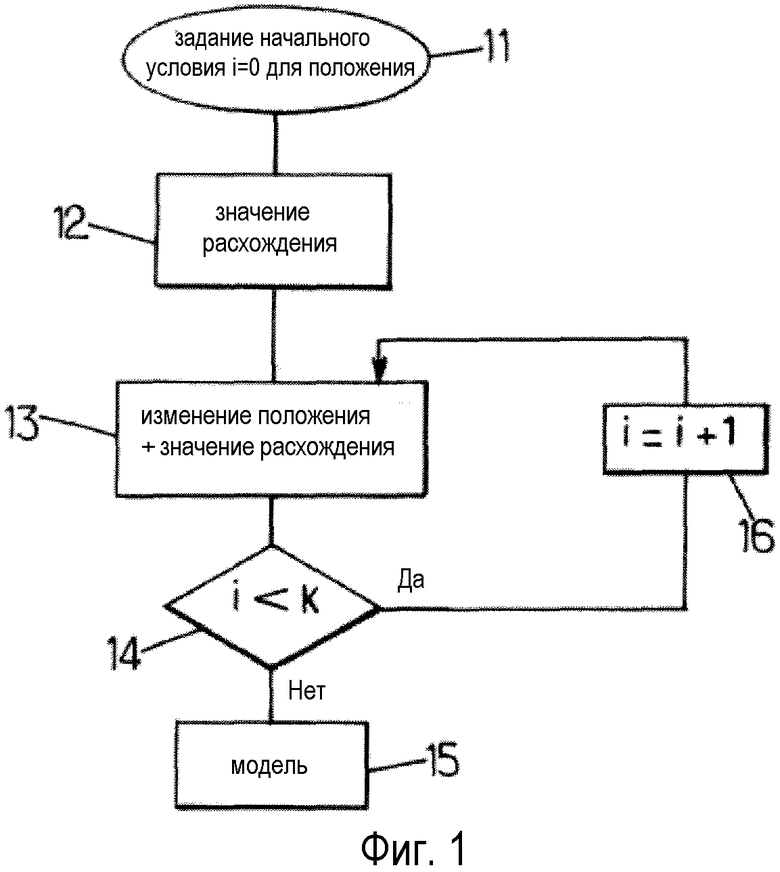
1. Способ калибровки по меньшей мере трех гироскопов, калибруемых в гироскопической системе, содержащей по меньшей мере четыре вибрационных гироскопа, выполненных с возможностью изменения положения вибрации между множеством положений вибрации;
при этом первое измерение обеспечивают каждым из указанных по меньшей мере трех гироскопов, подлежащих калибровке, и второе измерение обеспечивают комбинацией соответствующих измерений от других гироскопов указанной системы, указанные первое и второе измерения выполняют по одной и той же оси измерения;
для каждого из по меньшей мере трех калибруемых гироскопов, который вибрирует в одном из положений вибрации, указанный способ калибровки содержит следующие этапы, на которых:
/1/ определяют (12) значение ухода измерения между указанным первым измерением и указанным вторым измерением;
/2/ выдают (13) команду на изменение положения вибрации калибруемого гироскопа на другое положение вибрации из указанного множества положений вибрации и повторяют этап /1/;
/3/ повторяют (14) этап /2/ K раз, при этом K является положительным целым числом; и
/4/ формируют (15) модель ухода в зависимости от положения вибрации калибруемого гироскопа на основе значений ухода, получаемых при повторениях этапа /1/;
в котором по меньшей мере три калибруемых гироскопа калибруют посредством формирования модели ухода, применяя этап /1/ последовательно для каждого из гироскопов, затем этап /2/ последовательно для каждого из гироскопов, затем этап /3/ последовательно для каждого из гироскопов и, наконец, этап /4/ последовательно для каждого из гироскопов.
2. Способ калибровки по п.1, в котором в гироскопической системе, содержащей четыре вибрационных гироскопа, три вибрационных гироскопа располагают по трем ортогональным осям соответственно и четвертый вибрационный гироскоп располагают по трисектрисе указанных трех ортогональных осей.
3. Способ калибровки по п.1 или 2, в котором после этапа /4/ измерения, обеспечиваемые вибрационным гироскопом, для которого была сформирована модель ухода на этапе /4/, корректируют на основе указанной модели ухода.
4. Способ калибровки по п.1, в котором конкретное значение ухода также получают, выполняя этап /1/ в течение периода времени, соответствующего изменению положения вибрации калибруемого гироскопа, при этом указанное конкретное значение ухода используют, чтобы прокалибровать масштабный коэффициент калибруемого гироскопа.
5. Способ калибровки по п.1, в котором в гироскопической системе, предоставляющей навигационную информацию на основе соответствующих измерений от набора по меньшей мере трех определенных вибрационных гироскопов,
во время реализации этапов с /1/ по /4/ относительно калибруемого гироскопа из указанного набора измерение от калибруемого гироскопа, на основе которого предоставляется навигационная информация, заменяют измерением по той же оси измерения, что и для указанного гироскопа, подлежащего калибровке, получаемым комбинированием соответствующих измерений от других двух вибрационных гироскопов из указанного набора и от по меньшей мере одного четвертого вибрационного гироскопа.
6. Способ калибровки по п.1, в котором в гироскопической системе, предоставляющей навигационную информацию на основе соответствующих измерений от набора трех конкретных вибрационных гироскопов,
во время реализации этапов с /1/ по /4/ относительно калибруемого гироскопа из указанного набора измерение от калибруемого гироскопа, на основе которого предоставляется навигационная информация, корректируют на основе комбинации измерений, обеспечиваемых другими гироскопами указанной системы, а не калибруемым гироскопом.
7. Способ калибровки по п.1, в котором модель ухода в зависимости от положения вибрации получают одним из средств определения из интерполяции значений ухода, получаемых при повторениях этапа /1/, гармонического анализа значений ухода, получаемых при повторениях этапа /1/, и полиномиального анализа значений ухода, получаемых при повторениях этапа /1/.
8. Способ калибровки по п.1, в котором значения измерения относятся к одному измерению из набора измерений, содержащих измерение угла и измерение угловой скорости.
9. Гироскопическая система (40), содержащая по меньшей мере четыре вибрационных гироскопа (41), выполненных с возможностью изменения положения вибрации между множеством положений вибрации;
при этом первое измерение обеспечивается одним из по меньшей мере трех гироскопов, подлежащих калибровке, и второе измерение обеспечивается комбинацией соответствующих измерений от других гироскопов указанной системы, указанные первое и второе измерения выполняются по одной и той же оси измерения;
для калибровки гироскопа, подлежащего калибровке, указанная гироскопическая система содержит:
- блок (42) определения, выполненный с возможностью определять значение ухода измерения между указанным первым измерением и указанным вторым измерением;
- командный блок (43), выполненный с возможностью выдавать команды на изменение положения вибрации калибруемого гироскопа на другое положение вибрации из указанного множества положений вибрации и запрашивать определение значения ухода блоком определения; и
- блок (44) формирования, выполненный с возможностью формировать модель ухода в зависимости от положения вибрации калибруемого гироскопа на основе значений ухода, обеспечиваемых блоком определения;
в которой по меньшей мере три калибруемых гироскопа калибруются путем формирования модели ухода, путем применения указанного блока определения последовательно для каждого из гироскопов, затем указанного командного блока K раз, при этом K является положительным целым числом, последовательно для каждого из гироскопов, затем указанного блока формирования последовательно для каждого из гироскопов.
10. Гироскопическая система по п.9, содержащая четыре вибрационных гироскопа, при этом три вибрационных гироскопа расположены по трем ортогональным осям соответственно и четвертый вибрационный гироскоп расположен по трисектрисе указанных трех ортогональных осей.
11. Гироскопическая система по п.9 или 10, в которой измерения, обеспечиваемые вибрационным гироскопом, для которого модель ухода была сформирована блоком формирования, корректируются на основе указанной модели ухода.
12. Гироскопическая система по п.9, предоставляющая навигационную информацию на основе соответствующих измерений от набора из по меньшей мере трех конкретных вибрационных гироскопов,
в которой измерение от калибруемого гироскопа, на основе которого предоставляется навигационная информация, заменяется измерением по той же оси измерения, что и для указанного гироскопа, подлежащего калибровке, получаемым комбинированием соответствующих измерений от других двух вибрационных гироскопов из указанного набора и от по меньшей мере одного четвертого вибрационного гироскопа.
13. Гироскопическая система по п.9, предоставляющая навигационную информацию на основе соответствующих измерений от набора по меньшей мере трех конкретных вибрационных гироскопов,
в которой измерение от калибруемого гироскопа, на основе которого предоставляется навигационная информация, корректируется на основе комбинации измерений, обеспечиваемых другими гироскопами указанной системы, а не калибруемым гироскопом.
| FR 2904870 A1, 15.02.2008 | |||
| Ореольный фотометр | 1988 |
|
SU1571417A1 |
| US 2005224257 A1, 13.10.2005 | |||
| FR 2915569 A1, 31.10.2008 | |||
| EP 1970669 A2, 17.09.2008 | |||
| СПОСОБ КАЛИБРОВКИ ГИРОСКОПОВ | 1997 |
|
RU2121134C1 |
| СПОСОБ КАЛИБРОВКИ ГИРОСКОПИЧЕСКИХ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 1999 |
|
RU2156959C1 |

