Изобретение относится к вибрирующим гироскопам, принцип работы которых основан на использовании эффекта силы Кориолиса, и, в частности, относится к точности измерения значений углов поворота, выдаваемых гироскопом этого типа.
Такие вибрирующие гироскопы классически применяют в инерциальных системах, предназначенных для навигации, например для гироскопического компаса, предназначенного для получения измерения угла относительно базового направления, которое является направлением географического севера (курс).
Осесимметричные гироскопы типа Кориолисовы Вибрирующие Гироскопы, например, типа Полусферические Резонансные Гироскопы или, в целом, называемые гироскопами типа I, описанные в документе "Type I and Type II micromachined vibratory gyroscopes", Andrei M.Shkel, стр.588-593, IEEE/ION ("Institute of Electrical and Electronics Engineer/ Institute of Navigation" PLANS 2006, Сан Диего, Калифорния, США), работают в режиме разомкнутого контура и позволяют измерять абсолютный угол поворота на основе измерения угла, характеризующего положение колебания гироскопа по отношению к измерительным электродам.
Такой гироскоп можно также использовать в режиме замкнутого контура путем управления положением колебания через прецессионный привод, как описано, в частности, в документе FR 2 755 227.
В этом случае положение колебания гироскопа фиксируют, и измерение получают на основании команды, которую необходимо подать на гироскоп, чтобы удерживать его в этом фиксированном положении колебания. Этот тип работы называют также «гирометрическим режимом». При этом значения, получаемые путем физического измерения, соответствуют не углу, а угловой скорости.
Измерения, выдаваемые этими вибрирующими гироскопами, могут содержать погрешности, зависящие в основном от положения колебания по отношению к измерительным электродам. Следовательно, эти погрешности меняются в зависимости от положения колебания.
Эти погрешности приводят к снижению степени точности измеренных значений. Следовательно, необходимо стараться уменьшить эти погрешности, чтобы повысить эффективность гироскопа этого типа.
В контексте работы в замкнутом контуре или работы в гирометрическом режиме в документе ЕР 1752733 описан способ, предназначенный для уменьшения таких погрешностей, влияющих на измеряемые значения, чтобы повысить характеристики таких измерительных приборов.
Он основан на симметрии погрешностей таких гирометров между двумя положениями колебания указанных гирометров, отстоящими друг от друга на 90°, чтобы уменьшить среднее значение этих погрешностей, задавая изменение положения колебания гирометров между двумя положениями колебания, разделенными угловым расстоянием 90°.
Во время перехода от одного положения колебания к другому в этом документе предложено использовать второй гироскоп в режиме замкнутого контура или гирометр, чтобы получать измерение угловой скорости, вместо первого гирометра, когда он находится в процессе изменения положения колебания и поэтому не может выдать достоверное значение измеряемой угловой скорости.
Вместе с тем, следует отметить, что измерения, производимые гирометром, характеризуются, по сравнению с измерениями при помощи гироскопа, работающего в режиме разомкнутого контура, ухудшением точности производимого измерения, которое в основном связано с погрешностями, появляющимися в результате преобразования, которое необходимо ввести в команду для получения угловой скорости.
Задачей настоящего изобретения является устранение этих недостатков и улучшение указанной ситуации.
Вариант осуществления изобретения связан с гироскопами типа I.
Поставленная задача решена в способе измерения при помощи гироскопической системы, по меньшей мере, содержащей:
- вибрирующий гироскоп в качестве первого средства измерения угла, выполненный с возможностью изменения положения колебания среди множества положений колебания и осуществления первого измерения значений угла относительно оси измерения в одном из положений колебания, при этом указанное первое средство измерения имеет первую нулевую точку отсчета в качестве значения угла; и
- второе средство измерения, выполненное с возможностью осуществления второго измерения значений угла вдоль указанной оси измерения, при этом указанное второе средство измерения имеет вторую нулевую точку отсчета в качестве значения угла;
при этом указанный способ измерения содержит следующие этапы для осуществления изменения положения колебания первого средства измерения угла:
а) в первый период времени получают одновременно первые значения угла при помощи первого средства измерения угла, вибрирующего в текущем положении колебания из множества положений колебания, и вторые значения угла при помощи второго средства измерения угла; и из них выводят вторые скорректированные значения угла, корректируя вторую нулевую точку отсчета на основе сравнения первых и вторых значений угла, полученных в указанный первый период времени;
б) во второй период времени подают команду на изменение положения колебания первого средства измерения угла из текущего положения в другое положение колебания из указанного множества положений колебания;
в) в третий период времени получают одновременно первые значения угла при помощи первого средства измерения угла и вторые значения угла при помощи второго средства измерения угла; и из них выводят первые скорректированные значения угла, корректируя первую нулевую точку отсчета на основе сравнения первых и вторых значений угла, полученных в указанный третий период времени.
Благодаря этим отличительным признакам можно повернуть положение вибрирующего гироскопа, который используют в качестве первого средства измерения, продолжая при этом получать достоверные значения измерения угла.
Действительно, в такой системе первое и второе средства измерения выполнены с возможностью измерения значений угла. Таким образом, предпочтительно можно адаптировать значения угла, выдаваемые первым средством измерения, соответственно вторым средством измерения, к значениям углов, выдаваемым вторым средством измерения, соответственно первым средством измерения. Для этого предусматривают адаптацию первой нулевой точки отсчета первого средства измерения, соответственно второй нулевой точки отсчета второго средства измерения ко второй нулевой точке отсчета второго средства измерения, соответственно к первой нулевой точке отсчета первого средства измерения.
Таким образом, можно получать значения углов, когерентные между собой в течение всего процесса изменения положения колебания вибрирующего гироскопа. Действительно, независимо от того, получают измерение значения угла от первого средства измерения угла или от второго средства измерения угла, эти значения угла предпочтительно корректируют по отношению к их соответственно используемым нулевым точкам отсчета.
Следовательно, в данном случае можно управлять изменением положений колебания вибрирующего гироскопа, что позволяет усреднить погрешности, связанные соответственно с каждым из положений колебания вибрирующего гироскопа, продолжая при этом получать когерентные между собой значения угла.
Следует отметить, что такой когерентности в значениях измерения невозможно добиться при использовании известной системы, так как в ней речь идет об измерении угловой скорости.
Таким образом, погрешности измерения первого средства измерения, которые связаны с положениями колебания вибрирующего гироскопа, предпочтительно можно усреднить на разных положениях колебания, применяемых на уровне вибрирующего гироскопа. Измерение угла может быть получено при помощи первого средства измерения, которое вибрирует в первом положении, затем, пока на гироскопе происходит изменение положения колебания из первого положения колебания во второе положение колебания, измерение угла предпочтительно получают при помощи второго средства измерения и после коррекции значений угла по отношению к различным нулевым точкам отсчета первого и второго средств измерения.
Следует отметить, что второе средство измерения угла является любым средством измерения угла.
Таким образом, в этих условиях измерение угла, получаемое при помощи вибрирующего гироскопа, содержит либо погрешности, связанные с первым положением колебания, либо погрешности, связанные со вторым положением колебания.
Число положений колебания, в которых предполагают конфигурировать вибрирующий гироскоп, не связано с какими-либо ограничениями.
При каждом изменении положения колебания предпочтительно можно повторять этапы а)-в), чтобы получать достоверные и когерентные значения измерения углов согласно варианту осуществления настоящего изобретения.
Так, гироскопическая система может выдавать следующие значения угла:
- до и во время этапа а) и после этапа в) - значения угла, получаемые при помощи первого средства измерения угла;
- на этапах б) и в) - значения угла, получаемые при помощи второго средства измерения угла.
Изменение положения колебания первого средства измерения угла на этапах а)-в) можно повторять последовательно несколько раз.
Кроме того, в случае, когда вибрирующий гироскоп может вибрировать в K последовательных положениях колебания, такое изменение положения колебания позволяет переходить от положения колебания i к положению колебания i+1 при любом i, составляющем от 1 до К-i. При каждом повторении этапов а)-в) первое положение колебания этапа а) соответствует положению колебания, в котором вибрирует вибрирующий гироскоп на последнем осуществленном этапе в), и второе положение колебания соответствует следующему положению колебания во множестве рассматриваемых положений колебания.
Гироскопическая система может содержать N вибрирующих гироскопов, при этом N является целым числом, большим или равным 3, в этом случае N гироскопов выполнены с возможностью изменения положения колебания среди множества положений колебания и с возможностью осуществления соответствующих измерений значений угла вдоль соответствующих осей измерения в соответствующих положениях колебания указанного множества положений колебания. В этом случае первое средство измерения может соответствовать любому из N вибрирующих гироскопов; и второе средство измерения может соответствовать любому набору гироскопов среди N-1 других гироскопов системы и выполнено с возможностью осуществления измерения угла вдоль оси измерения первого средства измерения и относительно второй нулевой точки отсчета.
В такой архитектуре системы вибрирующих гироскопов настоящее изобретение предпочтительно можно применять для всех или для части этих различных вибрирующих гироскопов поочередно, поскольку первое средство измерения может последовательно соответствовать различным вибрирующим гироскопам рассматриваемой системы измерения.
Если число N равно 3, три вибрирующих гироскопа могут иметь соответствующие попарно компланарные и нелинейные оси измерения.
В этом случае можно предусмотреть образование первого дублета разных линейных комбинаций, позволяющих определять значения угла вдоль первой оси измерения, и второго дублета разных линейных комбинаций, позволяющего определять значения угла вдоль второй оси измерения. После этого можно применять способ измерения согласно варианту осуществления настоящего изобретения для каждого из дублетов линейных комбинаций.
По меньшей мере, две из осей измерения могут быть также по существу перпендикулярными.
Если N тоже равно 3; три гироскопа могут находиться в одной и той же плоскости таким образом, чтобы их соответствующие оси измерения образовали между собой угол, по существу равный 120°.
Если N равно 4, четыре гороскопа могут находиться в пространстве таким образом, чтобы их соответствующие оси измерения были ориентированы по четырем трисектрисам пространства.
Если N равно 4, четыре гироскопа могут иметь не компланарные по тройкам и не коллинеарные по парам оси измерения.
В этом случае можно образовать первый дублет разных линейных комбинаций, позволяющих определять значения угла вдоль первой оси измерения, второй дублет разных линейных комбинаций, позволяющих определять значения угла вдоль второй оси измерения, и третий дублет разных линейных комбинаций, позволяющий определять значения угла вдоль третьей оси измерения. В этом случае можно применять этапы способа измерения согласно варианту выполнения настоящего изобретения для каждого из дублетов линейных комбинаций.
Положения колебания множества положений вибраций могут быть также последовательно разделены значением угла, соответствующим 360 градусам, поделенным на целое число.
Положения колебания множества положений вибраций можно определить таким образом, чтобы распределить используемые положения колебания между 0 и 2π радиан.
Если система измерения содержит четыре гироскопа А, В, С и D, расположенные в пространстве таким образом, что их соответствующие оси измерения ориентированы вдоль четырех трисектрис пространства, то дублеты линейных комбинаций между четырьмя измерениями, соответственно обозначенными а, b, с и d, используемыми для восстановления трех по существу перпендикулярных осей измерения, являются следующими:
для первой оси измерения х:
а+b и -(с+d);
для второй оси измерения y:
b+с и -(а+d); и
для третьей оси измерения z:
а+с и -(b+d)
Команды изменения положения колебания можно выполнять последовательно на каждом из вибрирующих гироскопов.
Четыре вибрирующих гироскопа можно адаптировать таким образом, чтобы проверялось следующее отношение:
a+b+c+d=0.
Положения колебания множества положений вибраций могут быть также последовательно разделены значением угла, соответствующим 360 градусам, поделенным на целое число.
Можно также предусмотреть определение положений колебания из множества положений колебания в режиме реального времени, чтобы распределить используемые положения колебания между 0 и 360 градусами с учетом уже пройденных положений колебания.
Можно также получать первые и/или вторые значения угла, скорректированные также с учетом масштаба шкалы.
Вторым объектом настоящего изобретения является гироскопическая система измерения, выполненная с возможностью применения способа, являющегося первым объектом настоящего изобретения.
Она содержит, по меньшей мере:
- вибрирующий гироскоп в качестве первого средства измерения угла, выполненный с возможностью изменения положения колебания среди множества положений колебания и с возможностью осуществления первого измерения значений угла вдоль оси измерения в одном из положений колебания указанного множества положений колебания, при этом указанное первое средство измерения имеет первую нулевую точку отсчета и выдает первые значения; и
- второе средство измерения, выполненное с возможностью осуществления второго измерения значений угла вдоль указанной оси измерения, при этом указанное второе средство измерения имеет вторую нулевую точку отсчета в качестве значения угла и выдает вторые значения;
при этом гироскопическая система дополнительно содержит:
- блок коррекции вторых значений угла, выполненный с возможностью выдачи вторых скорректированных значений путем корректировки второй нулевой точки отсчета на основе сравнения первых и вторых значений угла, полученных за один период времени;
- блок коррекции первых значений угла, выполненный с возможностью выдачи первых скорректированных значений путем корректировки первой нулевой точки отсчета на основе сравнения первых и вторых значений угла, полученных за другой период времени;
при этом указанные блоки коррекции первых и вторых значений применяют во время изменения положения колебания, по меньшей мере, первого средства измерения угла.
Другие отличительные признаки и преимущества изобретения будут более очевидны из нижеследующего описания, представленного в качестве иллюстративного примера, со ссылками на прилагаемые чертежи.
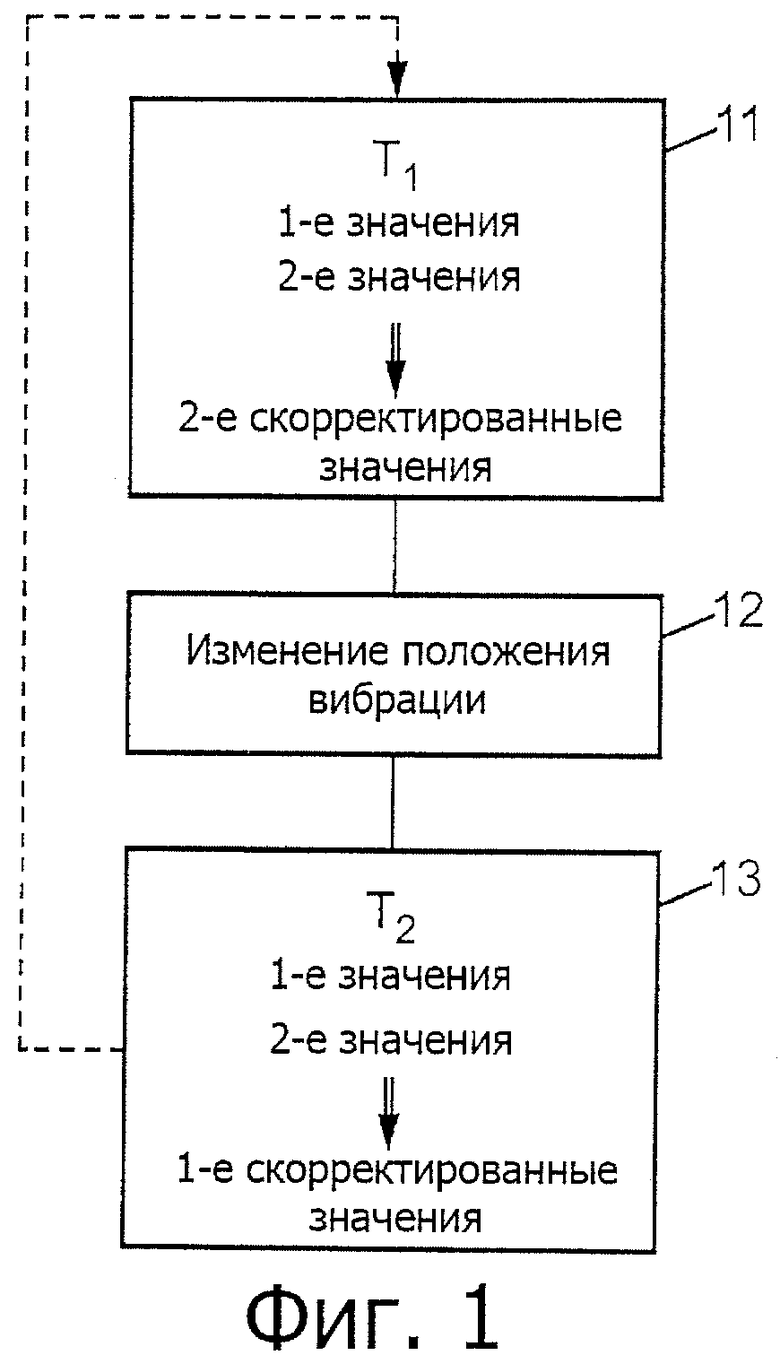
На фиг.1 показаны основные этапы осуществления способа измерения при помощи гироскопической системы согласно варианту осуществления изобретения;
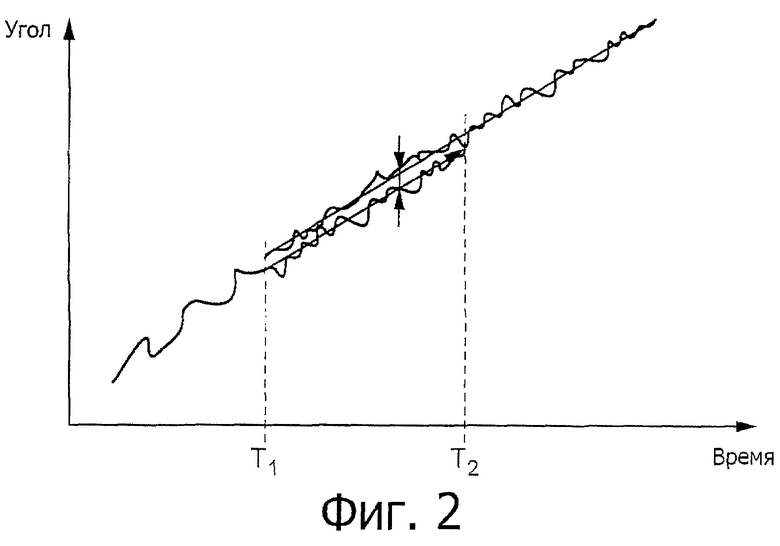
на фиг.2 показано изменение значений измерения, выдаваемых гироскопической системой согласно варианту осуществления настоящего изобретения;
на фиг.3 показана гироскопическая система согласно варианту осуществления настоящего изобретения.
На фиг.1 показаны основные этапы осуществления способа измерения при помощи гироскопической системы согласно варианту осуществления настоящего изобретения.
На этапе 11 в период времени Т1 одновременно первое и второе средства измерения угла выдают соответственно первые и вторые значения угла. На основании этих двух типов значений можно скорректировать вторые значения угла и соответствующую нулевую точку отсчета таким образом, чтобы сделать их когерентными с первыми значениями угла, связанными с соответствующей нулевой точкой отсчета.
Таким образом, можно обеспечить угловую непрерывность в значениях, выдаваемых первым и вторым средствами. После этого можно произвести изменение положения колебания вибрирующего гироскопа, образующего первое средство измерения, поскольку система измерения может выдавать когерентные значения, то есть скорректированные значения угла, на основании измерения, произведенного вторым средством измерения. Таким образом, на этапе 12 производят изменение положения колебания вибрирующего гироскопа.
После этого изменения положения можно либо продолжить получать значения угла от второго средства измерения в течение некоторого времени, либо опять получать значения угла от первого средства измерения, которое при этом вибрирует в другом положении колебания. Настоящее изобретение не имеет никаких ограничений, связанных с этим некоторым периодом времени, в течение которого можно получать вторые скорректированные значения.
На этапе 13 опять принимают в расчет одновременно первые и вторые значения угла, чтобы иметь возможность скорректировать получаемые первые значения угла, которые поступают от первого средства измерения, вибрирующего в положении колебания, заданном во время его последнего изменения.
На фиг.2 показано изменение значений измерения, выдаваемых гироскопической системой согласно варианту осуществления настоящего изобретения.
Изменение значений угла описано в зависимости от времени в ходе осуществления этапов способа измерения.
В данном случае до момента времени T1 значения угла получают от первого средства измерения. Затем между моментами времени T1 и Т2 учитывают значения угла, поступающие от первого средства измерения, и значения угла, поступающие от второго средства измерения, чтобы получить вторые скорректированные значения угла на основании значений, полученных от второго средства измерения.
Таким образом, этот период соответствует периоду наложения, который используют для обеспечения когерентности значений угла, выдаваемых системой во времени.
Затем, после прохождения этого периода наложения можно задать команду на изменение положения колебания первого средства измерения. Действительно, в этом случае система измерения выдает вторые скорректированные значения измерения.
На фиг.3 показана гироскопическая система измерения согласно варианту осуществления настоящего изобретения.
Эта система содержит:
- вибрирующий гироскоп 31, который выдает первые значения; и
- второе средство 32 измерения угла, которое выдает вторые значения;
- блок 34 коррекции вторых значений угла, выполненный с возможностью выдачи вторых скорректированных значений путем корректировки второй нулевой точки отсчета на основе сравнения первых и вторых значений угла, полученных за один период времени;
- блок 33 коррекции первых значений угла, выполненный с возможностью выдачи первых скорректированных значений путем корректировки первой нулевой точки отсчета на основе сравнения первых и вторых значений угла, полученных за другой период времени.
Блоки коррекции первых и вторых значений применяют во время изменения положении колебания, по меньшей мере, первого средства измерения угла.
Множество положений колебания вибрирующего гироскопа может соответствовать разным положениям К. Целое число К можно выбрать таким образом, чтобы добиться оптимальной эффективности. В связи с этим следует отметить, что повышение эффективности, достигаемое за счет усреднения погрешностей, связанных с разными положениями колебания, путем применения способа измерения согласно варианту осуществления, может соответствовать потере точности, связанной с разбивкой общей продолжительности измерения на несколько периодов измерений, связанных с изменениями положений колебания последовательно на всех К положениях колебания.
Характеристики системы можно также улучшить, регулируя соотношение продолжительности наложения и периода времени, который проходит между двумя изменениями положения колебания. Действительно, речь идет о достижении компромисса между повышением эффективности за счет усреднения погрешностей, связанных с разными положениями колебания, и потерей эффективности, связанной с тем, что при каждом переходе вводят связующую с шумом, присутствующим в первом и втором значениях угла во время периода наложения.
Гироскопическая система измерения может содержать N вибрирующих гироскопов, при этом N является целым числом, большим или равным 3; N гироскопов выполнены с возможностью изменения положения колебания среди множества положений колебания и с возможностью осуществления соответствующих измерений угла вдоль соответствующих осей измерения в соответствующих положениях колебания из указанного множества положений колебания. В этом случае первое средство измерения может соответствовать любому из N вибрирующих гироскопов, тогда как второе средство измерения соответствует любому набору гироскопов среди N-1 других гироскопов системы, выполненному с возможностью измерения угла вдоль оси измерения первого средства измерения и относительно второй нулевой точки отсчета.
Можно предусмотреть несколько разных конфигураций в качестве примеров, но не ограничивая области применения настоящего изобретения.
Так, например, если N равно 3, три вибрирующих гироскопа могут иметь соответствующие попарно компланарные и нелинейные оси измерения.
Если N равно 3; три гироскопа могут находиться в одной и той же плоскости таким образом, чтобы их соответствующие оси измерения образовали между собой угол, по существу равный 120°.
Если N равно 4, четыре гироскопа могут находиться в пространстве таким образом, чтобы их соответствующие оси измерения были ориентированы по четырем трисектрисам пространства.
Если N равно 4, четыре вибрирующих гироскопа могут иметь не компланарные по тройкам и не коллинеарные по парам оси измерения.
В варианте осуществления настоящего изобретения можно также снабдить средство измерения несколькими вибрирующими гироскопами, из которых, по меньшей мере, один вибрирующий гироскоп выполнен с возможностью изменения положения колебания и с возможностью осуществления измерения значений угла. Измерение угла, выдаваемое этим, по меньшей мере, одним вибрирующим гироскопом, может быть линейной комбинацией значений угла, выдаваемых другими гироскопами второго средства измерения угла, чтобы соответствовать второму измерению значений угла вдоль требуемой оси измерения.
В этом случае в ходе способа измерения можно ввести дополнительный этап. Так, можно задать изменение положения колебания одного или нескольких из вибрирующих гироскопов второго средства измерения угла из текущего положения в другое положение колебания из множества положений колебания.
Кроме того, второе средство измерения может состоять из вибрирующих гироскопов, каждый из которых выполнен с возможностью изменения положения колебания.
Если первое средство измерения является вибрирующим гироскопом, и второе средство измерения тоже является вибрирующим гироскопом, можно предусмотреть, чтобы оба вибрирующих гироскопа имели коллинеарные оси измерения.
В следующих разделах приводится описание применения настоящего изобретения в контексте калибровки вибрирующего гироскопа внутри бортового инерциального счетчика координат, выдающего контрольное значение ориентации.
Для этого в гироскопической системе, содержащей, по меньшей мере, четыре неколлинеарных гироскопа, используют измерения, выдаваемые тремя из этих четырех гироскопов, в то время как производят калибровку четвертого вибрирующего гироскопа.
Этап калибровки содержит изменение положения колебания вибрирующего гироскопа во время калибровки. Так, пока, по меньшей мере, один из четырех вибрирующих гироскопов находится в процессе калибровки, измерения, выдаваемые, по меньшей мере, тремя другими вибрирующими гироскопами, используют для получения контрольного значения ориентации.
В частности, операция калибровки состоит в установлении колебания в разных положениях и в снятии соответствующего измерения с калибруемого вибрирующего гироскопа. После этого достаточно вычесть из этих измерений реальный поворот носителя, измеренный тремя другими гироскопами. Затем эту операцию повторяют последовательно для всех вибрирующих гироскопов системы согласно варианту осуществления настоящего изобретения.
Можно предусмотреть, чтобы три из вибрирующих гироскопов были ориентированы по классическим системам с тремя прямыми углами и чтобы четвертый вибрирующий гироскоп был ориентирован по трисектрисе.
Калибровку гироскопов можно осуществить последовательно следующим образом.
Вычисляют разность D между измерением гироскопа во время калибровки и измерением второго средства измерения, которое содержит три других вибрирующих гироскопа. Это вычисление D производят в течение периода, когда подают команду на изменение положения колебания на калибруемый вибрирующий гироскоп.
D позволяет точно узнать угол, на который изменили положение вибрации, даже если точно не известен масштаб шкалы, который послужил для генерирования изменения положения. При этом данный кажущийся поворот, измеренный гироскопом во время калибровки, можно вычесть из навигационных расчетов.
Это вычисление осуществляют также во время периода, когда вибрацию сохраняют в данном положении. Таким образом, применяя команду на изменение положения, можно распределить положение колебания на k положений, и значение D сохраняют для каждого из этих k положений. Таким образом, получают погрешность измерения гироскопа в зависимости от положения колебания, что позволяет обновлять гармоничную модель отклонения погрешности. Эта процедура позволяет использовать те же 3 гироскопа для навигации, при этом коррекцию вводят за счет обновления соответствующей модели погрешности, и, таким образом, можно избежать переходных коммутационных явлений на гироскопах, используемых для навигации.
Предпочтительно, в случае больших изменений положения носителя, возмущающих положения, предусмотренные для колебания, можно отменить обновление модели отклонения и перенести его на следующий цикл.
Путем применения принципов настоящего изобретения для бортового инерциального счетчика координат и для калибровки вибрирующих гироскопов в этом бортовом счетчике координат можно производить калибровки в любой момент и прозрачно во время использования бортового инерциального счетчика. Действительно, такая гироскопическая система может выдавать контрольное значение ориентации, даже если на одном из вибрирующих гироскопов производят калибровку.
| название | год | авторы | номер документа |
|---|---|---|---|
| КАЛИБРОВКА ВИБРАЦИОННОГО ГИРОСКОПА | 2009 |
|
RU2509980C2 |
| КАЛИБРОВКА ГИРОСКОПИЧЕСКИХ СИСТЕМ С ВИБРАЦИОННЫМИ ГИРОСКОПАМИ | 2009 |
|
RU2509981C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ГИРОСКОПИЧЕСКИХ ИЗМЕРЕНИЙ С ИСПОЛЬЗОВАНИЕМ ВИБРАЦИОННОГО ГИРОСКОПА | 2009 |
|
RU2528037C2 |
| СИСТЕМА И СПОСОБ НАВИГАЦИИ НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2684994C1 |
| Микромеханический вибрационный кольцевой гироскоп | 2022 |
|
RU2800067C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПОДЗЕМНЫХ ГОРНЫХ РАБОТ И СПОСОБ ЕГО ОРИЕНТАЦИИ | 2018 |
|
RU2768087C2 |
| ГИРОСКОПИЧЕСКИЙ МАССОВЫЙ РАСХОДОМЕР И СПОСОБ ЕГО ФУНКЦИОНИРОВАНИЯ | 2001 |
|
RU2277226C2 |
| КОМПЕНСАЦИОННАЯ СИСТЕМА СИСТЕМЫ КООРДИНАТ СУХОПУТНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2331847C2 |
| СПОСОБ ОЦЕНКИ НАВИГАЦИОННЫХ ДАННЫХ НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА С ИСПОЛЬЗОВАНИЕМ ПАРАМЕТРОВ ГЕОМЕТРИИ И ОРИЕНТАЦИИ ДОРОГИ | 2018 |
|
RU2751680C1 |
| СПОСОБ КОМПЕНСАЦИИ СИСТЕМАТИЧЕСКОЙ СОСТАВЛЯЮЩЕЙ ДРЕЙФА НУЛЕВОГО СИГНАЛА ДАТЧИКА УГЛОВОЙ СКОРОСТИ | 2019 |
|
RU2695439C1 |
Изобретение относится к вибрирующим гироскопам, принцип работы которых основан на использовании эффекта силы Кориолиса. Гироскопическая система содержит вибрирующий гироскоп в качестве первого средства измерения угла, выполненный с возможностью осуществления первого измерения значений угла относительно оси измерения, и второе средство измерения, выполненное с возможностью осуществления второго измерения значений угла вдоль указанной оси измерения. Получают одновременно первые значения угла при помощи первого средства измерения угла, вибрирующего в текущем положении колебания, и вторые значения угла при помощи второго средства измерения угла; и из них выводят вторые скорректированные значения угла на основе сравнения первых и вторых значений угла. Затем подают команду на изменение положения колебания первого средства измерения угла из текущего положения в другое положение колебания. После этого получают одновременно первые значения угла при помощи первого средства измерения угла и вторые значения угла при помощи второго средства измерения угла; и из них выводят первые значения угла, скорректированные на основе сравнения первых и вторых значений угла. Изобретение позволяет повысить точность измерения угла. 2 н. и 17 з.п. ф-лы, 3 ил.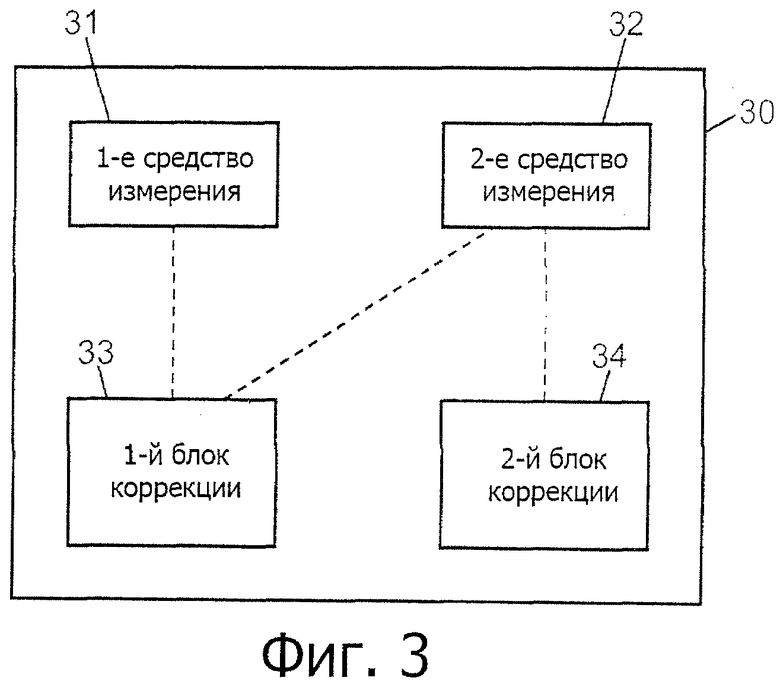
1. Способ измерения при помощи гироскопической системы, по меньшей мере, содержащей:
- вибрирующий гироскоп в качестве первого средства измерения угла, выполненный с возможностью изменения положения колебания среди множества положений колебания и с возможностью осуществления первого измерения значений угла относительно оси измерения в одном из положений колебания, при этом указанное первое средство измерения имеет первую нулевую точку отсчета в качестве значения угла; и
- второе средство измерения, выполненное с возможностью осуществления второго измерения значений угла относительно указанной оси измерения, при этом указанное второе средство измерения имеет вторую нулевую точку отсчета в качестве значения угла;
при этом указанный способ измерения содержит следующие этапы для осуществления изменения положения колебания первого средства измерения угла:
а) в первый период времени получают одновременно первые значения угла при помощи первого средства измерения угла, вибрирующего в текущем положении колебания из множества положений колебания, и вторые значения угла при помощи второго средства измерения угла; и из них выводят вторые скорректированные значения угла, корректируя вторую нулевую точку отсчета на основе сравнения первых и вторых значений угла, полученных в указанный первый период времени;
б) во второй период времени подают команду на изменение положения колебания первого средства измерения угла из текущего положения в другое положение колебания из указанного множества положений колебания;
в) в третий период времени получают одновременно первые значения угла при помощи первого средства измерения угла и вторые значения угла при помощи второго средства измерения угла; и из них выводят первые скорректированные значения угла, корректируя первую нулевую точку отсчета на основе сравнения первых и вторых значений угла, полученных в указанный третий период времени.
2. Способ измерения по п.1, в котором гироскопическая система выдает следующие значения угла:
- до и во время этапа а) и после этапа в) - значения угла, получаемые при помощи первого средства измерения угла;
- на этапах б) и в) - значения угла, получаемые при помощи второго средства измерения угла.
3. Способ измерения по п.1, в котором изменение положения колебания первого средства измерения угла на этапах а)-в) повторяют последовательно несколько раз.
4. Способ измерения по п.1, в котором указанная гироскопическая система содержит N вибрирующих гироскопов, при этом N является целым числом, большим или равным 3; при этом N гироскопов выполнены с возможностью изменения положения колебания среди множества положений колебания и с возможностью осуществления соответствующих измерений значений угла вдоль соответствующих осей измерения в соответствующих положениях колебания указанного множества положений колебания; первое средство измерения соответствует любому из N вибрирующих гироскопов; и второе средство измерения соответствует любому набору гироскопов среди N-1 других гироскопов системы и выполнено с возможностью осуществления измерения угла относительно оси измерения первого средства измерения и относительно второй нулевой точки отсчета.
5. Способ измерения по п.4, в котором, по меньшей мере, две из осей измерения являются перпендикулярными.
6. Способ измерения по п.4, в котором число N равно 3, при этом указанные три вибрирующих гироскопа имеют соответствующие попарно компланарные и нелинейные оси измерения.
7. Способ измерения по п.4, в котором N равно 3; и в котором три гироскопа расположены в одной и той же плоскости таким образом, чтобы их соответствующие оси измерения образовали между собой угол, по существу, равный 120°.
8. Способ измерения по п.4, в котором N равно 4; и в котором четыре гироскопа расположены в пространстве таким образом, чтобы их соответствующие оси измерения были ориентированы по четырем трисектрисам пространства.
9. Способ измерения по п.4, в котором N равно 4; при этом четыре гироскопа имеют не компланарные по тройкам и не коллинеарные по парам оси измерения.
10. Способ измерения по п.1, в котором положения колебания множества положений вибраций последовательно разделены значением угла, соответствующим 360°, поделенным на целое число.
11. Способ измерения по п.1, в котором положения колебания множества положений вибраций определяют таким образом, чтобы распределить используемые положения колебания между 0 и 2π радиан.
12. Способ измерения по п.1, в котором скорректированные первые и/или вторые значения угла получают с учетом масштаба шкалы.
13. Гироскопическая система измерения, по меньшей мере, содержащая:
- вибрирующий гироскоп в качестве первого средства измерения угла, выполненный с возможностью изменения положения колебания среди множества положений колебания и с возможностью осуществления первого измерения значений угла относительно оси измерения в одном из положений колебания указанного множества положений колебания, при этом указанное первое средство измерения имеет первую нулевую точку отсчета и выдает первые значения; и
- второе средство измерения, выполненное с возможностью осуществления второго измерения значений угла вдоль указанной оси измерения, при этом указанное второе средство измерения имеет вторую нулевую точку отсчета в качестве значения угла и выдает вторые значения;
при этом гироскопическая система дополнительно содержит:
- блок коррекции вторых значений угла, выполненный с возможностью выдачи вторых скорректированных значений путем адаптации второй нулевой точки отсчета на основе сравнения первых и вторых значений угла, полученных за один период времени;
- блок коррекции первых значений угла, выполненный с возможностью выдачи первых скорректированных значений путем адаптации первой нулевой точки отсчета на основе сравнения первых и вторых значений угла, полученных за другой период времени;
при этом указанные блоки коррекции первых и вторых значений применяют во время изменения положения колебания, по меньшей мере, первого средства измерения угла.
14. Гироскопическая система измерения по п.13, в которой значения угла поочередно выдают первое средство измерения угла и второе средство измерения угла во время изменения положения колебания первого средства измерения угла.
15. Гироскопическая система измерения по п.13, содержащая N вибрирующих гироскопов, при этом N является целым числом, большим или равным 3;
при этом N гироскопов выполнены с возможностью изменения положения колебания среди множества положений колебания и с возможностью осуществления соответствующих измерений угла вдоль соответствующих осей измерения в соответствующих положениях колебания из указанного множества положений колебания; первое средство измерения соответствует любому из N вибрирующих гироскопов; второе средство измерения соответствует любому набору гироскопов среди N-1 других гироскопов системы и выполнено с возможностью измерения угла вдоль оси измерения первого средства измерения и относительно второй нулевой точки отсчета.
16. Система измерения по п.15, в которой N равно 3, при этом указанные три вибрирующие гироскопа имеют соответствующие попарно компланарные и нелинейные оси измерения.
17. Система измерения по п.15, в которой N равно 3; и в которой три гироскопа находятся в одной и той же плоскости таким образом, чтобы их соответствующие оси измерения образовали между собой угол, по существу, равный 120°.
18. Система измерения по п.15, в которой N равно 4; и в которой четыре гироскопа расположены в пространстве таким образом, чтобы их соответствующие оси измерения были ориентированы по четырем трисектрисам пространства.
19. Система измерения по п.15, в которой N равно 4; при этом указанные четыре гироскопа имеют не компланарные по тройкам и не коллинеарные по парам оси измерения.
| Ореольный фотометр | 1988 |
|
SU1571417A1 |
| Способ термообработки железобетонных изделий | 1990 |
|
SU1752733A1 |
| US 6189382 В1, 20.02.2001 | |||
| ТВЕРДОТЕЛЬНЫЙ ВОЛНОВОЙ ГИРОСКОП | 2001 |
|
RU2207510C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ СКОРОСТИ ЛАЗЕРНОГО ГИРОСКОПА И СИСТЕМ НА ЕГО ОСНОВЕ | 2006 |
|
RU2307325C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДОПУСТИМЫХ ТЕМПЕРАТУРНЫХ РЕЖИМОВ СУШКИ ДИСПЕРСНЫХ ТЕРМОЛАБИЛЬНЫХ ПРОДУКТОВ В УСЛОВИЯХ СТУПЕНЧАТОГО ИЗМЕНЕНИЯ ТЕМПЕРАТУРЫ СУШИЛЬНОГО АГЕНТА | 2006 |
|
RU2319085C1 |
| JP 8178687 A, 12.07.1996. | |||

