Изобретение относится к преобразовательной технике, а именно к управлению асинхронными двигателями.
Известен способ управления асинхронным двигателем, при котором выходное силовое напряжение и его частота меняются одновременно (например, U/f=const), при этом при превышении частоты вращения двигателя заданного значения по сигналу обратной связи с тахогенератора выключают инвертор напряжения и включают только при равенстве заданного значения частоты вращения и фактического (RU, патент №2257663, кл. Н02Р 5/40, 2003 г.).
Недостатком известного способа управления является то, что для его осуществления необходимо двигатель оборудовать датчиком частоты вращения, что снижает область применения данного способа управления.
Известен способ управления, при котором при выходе хотя бы одного из параметров управляемого асинхронного двигателя за пределы, определенные уставками или расчетными условиями надежного функционирования, микропроцессорный блок управления формирует управляющие сигналы, которые поступают на управляющие входы выпрямителя и инвертора и приводят эти параметры в норму (RU, патент №2219650, кл. Н02Р 7/26, НО2Н 7/08, 7/122, 7/26).
Недостатком этого способа является сложность алгоритма управления, по которому осуществляется управление не только инвертором, но и выпрямителем.
Известен способ управления, при котором по заданному значению частоты вращения асинхронного двигателя и по принятому закону управления двигателем (например, U/f=const) формируют на выходе преобразователя координат составляющие вектора напряжения, в неподвижных двухфазных координатах (Uα, Uβ), по которым генератор широтно-импульсной модуляции (ШИМ) вырабатывает управляющие сигналы для автономного инвертора, который из постоянного напряжения формирует выходное переменное напряжение с широтно-импульсной модуляцией (Гарганеев А.Г., Каракумов А.С., Ланграф СВ., Нечаев М.А. «Электротехника » №9, 2005 г., стр.23, 24, рис.1, 2).
Недостатком данного способа управления является то, что способ управления реализуется при стабильном входном силовом напряжении. Известен способ управления, принятый за прототип, при котором по заданному значению частоты вращения асинхронного двигателя и по принятому закону скалярного частотного управления двигателем формируют на выходе преобразователя координат составляющие вектора напряжения в неподвижных двухфазных координатах (Uα, Uβ), по которым генератором широтно-импульсной модуляции (ШИМ) вырабатывают управляющие сигналы для автономного инвертора напряжения, которым из постоянного напряжения формируют выходное переменное напряжение с широтно-импульсной модуляцией, останавливают изменение задания по частоте при изменении входного переменного напряжения в широких пределах или изменении значения задания по частоте, когда ток или напряжение в звене постоянного тока достигают своих критических значений, и отключают автономный инвертор напряжения от источника постоянного тока до тех пор, пока ток или напряжение в звене постоянного тока не станет ниже критического значения, кроме этого на выходе автономного инвертора напряжения кратковременно формируют низковольтное постоянное напряжение, возбуждающее электродвигатель, в статорных обмотках которого магнитное поле ротора наводит переменный ток, частоту которого измеряют и с этой частотой осуществляют повторный пуск двигателя на «выбеге» (RU, патент №2361356, кл. Н02Р 21/00, Н02Н 7/08).
Недостатком предлагаемого способа управления является сложность определения пусковой частоты асинхронного двигателя на «выбеге» и разные законы частотного управления при наборе и сбросе заданной частоты вращения асинхронного двигателя, что усложняет алгоритм управления.
Техническим результатом изобретения является упрощение алгоритма управления асинхронным двигателем при наборе и сбросе заданной частоты вращения и при пуске асинхронного двигателя на «выбеге».
Указанный технический результат достигается способом управления, при котором по заданному значению частоты вращения асинхронного двигателя и по принятому закону скалярного частотного управления асинхронным двигателем вычисляют амплитуду и угол положения вектора выходного напряжения автономного инвертора напряжения, которые преобразователем координат преобразуют в составляющие вектора выходного напряжения в неподвижных двухфазных координатах (Uα, Uβ), по которым генератором широтно-импульсной модуляции (ШИМ) вырабатывают управляющие сигналы для автономного инвертора напряжения, которым из постоянного напряжения формируют выходное переменное напряжение с широтно-импульсной модуляцией, останавливают изменение задания по частоте при изменении входного переменного напряжения в широких пределах или изменении значения задания по частоте, когда ток или напряжение в звене постоянного тока достигают своих критических значений, и отключают автономный инвертор напряжения от звена постоянного тока до тех пор, пока ток или напряжение в звене постоянного тока не станет ниже критического значения, а также при изменении задания по частоте, пуске и остановки асинхронного двигателя выходные напряжения и частоту изменяют по одному и тому же закону скалярного частотного управления, при этом при выключении автономного инвертора напряжения плавно снижают выходные напряжения и частоту до нуля, а при повторном пуске начинают плавный разгон асинхронного двигателя с текущих значений напряжения и частоты для исключения перехода его в генераторный режим на «выбеге».
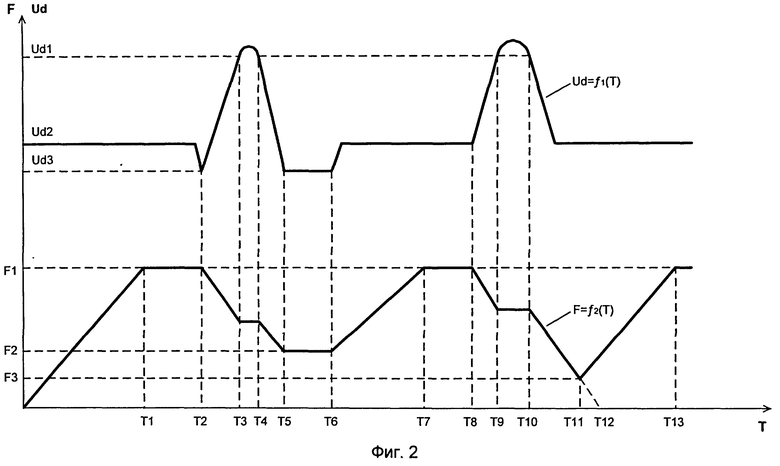
На фиг.1 представлена структурная схема устройства для реализации предложенного способа управления асинхронным двигателем.
На фиг.2 представлены график зависимости напряжения в звене постоянного тока от времени Ud=f1(T) и график зависимости частоты вращения асинхронного двигателя от времени F=f2(T), поясняющие процесс набора и сброса частоты вращения асинхронного двигателя.
Устройство, реализующее способ управления асинхронным двигателем, содержит (фиг.1) автономный инвертор напряжения 1, который представляет собой двухуровневый инвертор напряжения и выполнен на IGBT-транзисторах. Силовые выходы автономного инвертора напряжения 1 через три датчика фазных токов 2, 3, 4, подключены к статорным обмоткам асинхронного двигателя 5, а силовые входы, через звено постоянного тока 6, состоящего из датчика постоянного тока 7 и параллельно включенных датчика напряжения 8 и емкости 9, соединены с выходами выпрямителя 10, состоящего из тиристоров (катодная часть) и диодов (анодная часть), входы которого подключены к фазовым выводам А,В,С источника трехфазного переменного напряжения 11, фаза А которого подключена к входу зарядной цепи 12, выход которой подключен к плюсовому выходу выпрямителя 10. Управляющие входы автономного инвертора напряжения 1 и выпрямителя 10 соответственно через блок драйверов 13 и драйвер 14 соединены с блоком управления 15, состоящего из блока интерфейса 16, выходы которого подключены к блоку коммутации 17, второй выход которого соединен с вторым входом задатчика интенсивности 18, выход которого подключен к интегратору 19 и к блоку формирования выходного напряжения 20, выходы которых подключены соответственно к первому и второму входам преобразователя координат 21, выход которого подключен к первому входу генератора широтно-импульсной модуляции (ШИМ) 22, который своими выходами соединен с входами блока драйверов 13, который усиливает по мощности сигналы с генератора ШИМ 22, а также осуществляет гальваническую развязку между силовыми цепями автономного инвертора напряжения 1 и слаботочными цепями блока управления 15, при этом зарядная цепь 12 состоит из последовательно соединенных резистора 23 и диода 24 и в блок управления 15 введены блок выбора максимально возможной частоты 25, включенный первым входом к первому выходу блока коммутации 17, вторым входом к выходу датчика напряжения 8, а выходом к первому входу задатчика интенсивности 18, блок защиты 26, пять входов которого соединены соответственно с выходами датчиков постоянного тока 7, напряжения 8, трех фазных токов 2, 3, 4, при этом первый выход подключен к второму входу генератора ШИМ 22, а второй выход подключен к третьему входу задатчика интенсивности 18 и к второму входу блока плавного заряда 27, выход которого подключен к входу драйвера 14, а первый вход соединен с вторым входом задатчика интенсивности 18 и с вторым выходом блока коммутации 17.
Предлагаемый способ управления асинхронным двигателем реализован следующим образом.
Включают источник трехфазного переменного напряжения 11, при этом положительная полуволна переменного напряжения (фаза А) через зарядную цепь 12 заряжает емкость 9 в звене постоянного тока 6, при этом направление тока определяется диодом 24, а величина ограничивается резистором 23. Как только напряжение на емкости 9, измеренное датчиком напряжения 8, превысит минимально допустимое напряжение в звене постоянного тока 6, блок защиты 26 сформирует разрешающий сигнал для блока заряда 27 и задатчика интенсивности 18.
Команды управления («Пуск», «Задание по частоте», «Выключение» и др.) поступают на блок интерфейса 16 от внешних источников управления. Блок интерфейса 16 обеспечивает сопряжение внешних сигналов управления с сигналами блока управления 15. Сигналы с блока интерфейса 16 поступают на блок коммутации 17, который осуществляет выбор управляющих сигналов.
По команде «Пуск» с блока коммутации 17 по второму выходу включают задатчик интенсивности 18 и запускают блок плавного заряда 27, выход которого через драйвер 14 включает тиристоры выпрямителя 10. Драйвер 14 усиливает по мощности сигнал управления с блока плавного заряда 27, а также осуществляет гальваническую развязку блока управления 15 от силовых цепей выпрямителя 10. Тиристоры выпрямителя 10 при включении шунтируют токозарядную цепь 12. Вследствие этого конденсатор 9 дозаряжается и напряжение (Ud) в звене постоянного тока 6 возрастает. Команда «Задание по частоте» с первого выхода блока коммутации 17 через блок выбора максимально возможной частоты 25 поступает на задатчик интенсивности 18, который осуществляет плавное нарастание задания по частоте, обеспечивая тем самым разгон асинхронного двигателя 5 с постоянным ускорением. Блок выбора максимально возможной частоты 25 осуществляет обратное преобразование выходного напряжения в частоту. Если задание по частоте не соответствует выходному напряжению, то блок выбора максимально возможной частоты 25 ограничивает задание по частоте. Частота с выхода задатчика интенсивности 18 одновременно поступает на интегратор 19 и блок формирования выходного напряжения 20. По принятому закону скалярного частотного управления асинхронным двигателем 5 блоком формирования выходного напряжения 20 и интегратором 19 соответственно вычисляют амплитуду (Uвых) и угол (θ) положения вектора выходного напряжения автономного инвертора напряжения 1, которые преобразователем координат 21 преобразуют в составляющие вектора выходного напряжения в неподвижных двухфазных координатах (Uα, Uβ), по которым генератором ШИМ 22 вырабатывают управляющие сигналы, которые через блок драйверов 13 управляют автономным инвертором напряжения 1, которым из постоянного напряжения формируют выходное переменное напряжение с широтно-импульсной модуляцией. Процесс формирования выходного напряжения автономного инвертора напряжения 1 с использованием векторной ШИМ известен и подробно описан в прототипе (RU, патент №2361356, кл. Н02Р 21/00, Н02Н 7/08).
В процессе работы автономного инвертора напряжения 1 останавливают изменение задания по частоте при изменении входного переменного напряжения в широких пределах или изменении значения задания по частоте, когда ток или напряжение в звене постоянного тока 6 достигают своих критических значений и отключают автономный инвертор напряжения 1 от звена постоянного тока 6 до тех пор, пока ток или напряжение в звене постоянного тока 6 не станет ниже критического значения. При изменении задания по частоте, пуске и остановки асинхронного двигателя 5 выходные напряжения и частоту изменяют по одному и тому же закону скалярного частотного управления, при этом при выключении автономного инвертора напряжения плавно снижают выходные напряжения и частоту до нуля, а при повторном пуске начинают плавный разгон асинхронного двигателя 5 с текущих значений напряжения и частоты для исключения перехода его в генераторный режим на «выбеге».
Подробно набор и сброс частоты вращения асинхронного двигателя 5 поясняется графиками, представленными на Фиг.2.
При пуске асинхронного двигателя 5 или резком повышении величины напряжения источника трехфазного переменного напряжения 11, что ведет к повышению напряжения Ud в звене постоянного тока 6, задатчиком интенсивности 18 начинают плавно увеличивать задание по частоте в соответствии с принятым законом скалярного частотного управления.. Если при этом токи в фазах асинхронного двигателя 5, измеренные датчиками фазных токов 2, 3, 4, достигают критического значения, которое составляет 75% от максимально возможного значения, блок защиты 26 вырабатывает сигнал, по которому задатчик интенсивности 18 прекращает набор частоты. Как только фазные токи станут ниже критического значения, задатчик интенсивности 18 продолжит набор частоты. Регулирование продолжиться до тех пор, пока блок управления 15 не отработает задание по частоте. На Фиг.2 показан только режим пуска. В момент времени Т1 при постоянном значении напряжения Ш2 в звене постоянного тока частота вращения асинхронного двигателя 5 достигает заданного значения F1.
При резком снижении величины напряжения входного источника трехфазного напряжения 11 (например: сброс позиции контроллера машиниста тепловоза с верхней позиции на нижнюю) напряжение в звене постоянного тока 6 уменьшится с величины Ud2 до значения Ud3. Блоком выбора максимально возможной частоты 25 устанавливают задание по частоте, которое возможно при новом значении напряжения (ШЗ) в звене постоянного тока 6. Задатчик интенсивности 18 в момент времени Т2 начинает плавно снижать задание по частоте до нового значения F2 в соответствии с принятым законом скалярного частотного управления. При этом частота вращения асинхронного двигателя 5 начинает превышать частоту питания и асинхронный двигатель 5 входит в генераторный режим, при котором начинает дозаряжаться емкость 9 и расти напряжение в звене постоянного тока 6. При возрастании напряжения Ш в звене постоянного тока 6 до критического значения Ud1 (момент времени Т3), которое составляет 75% от максимально возможного значения, блоком защиты 26 вырабатывают сигнал (второй выход), по которому блок плавного заряда 27 выключает тиристоры выпрямителя 10 и блокирует задатчик интенсивности 18. При этом снижение частоты прекращают до тех пор, пока напряжение в звене постоянного тока 6 не станет ниже критического значения (момент времени Т4). В течение времени Т4-Т5 задатчиком интенсивности 18 плавно снижают задание по частоте до нового значения F2. В момент времени Т6 повышают напряжение в звене постоянного тока 6 с Ud3 до величины Ud2 и задатчиком интенсивности 18 плавно увеличивают задание по частоте до значения F1. В период времени Т7-Т8 асинхронный двигатель 5 вращают с заданной частотой F1. При поступлении команды «Выключение» в момент времени Т8 задатчиком интенсивности 18 плавно снижают задание по частоте до момента времени Т9, когда асинхронный двигатель 5 войдет в генераторный режим и напряжение Ud2 в звене постоянного тока 6 превысит критическое значение Ud1. В период времени Т9-Т10 блокируют задатчик интенсивности 18 и останавливают изменение задания по частоте. При снижении напряжения Ud2 в звене постоянного тока 6 ниже критического значения Ud1 (момент времени Т10) задатчиком интенсивности 18 продолжат плавно снижать задание по частоте. При поступлении команды «Повторный пуск» (момент времени Т11) задатчиком интенсивности 18 начинают плавный разгон асинхронного двигателя 5 с текущих значений напряжения и частоты (F3) до заданного значения F1 (момент времени Т13), что исключает переход его в генераторный режим на «выбеге». При отсутствии команды «Повторный пуск» асинхронный двигатель 5 в момент времени Т12 останавливают.
Применение при изменении задания по частоте, пуске и остановки асинхронного двигателя 5 одного и того же закона скалярного частотного управления позволяет упростить алгоритм управления, реализованный блоком управления 15. По команде «Выключение» блоком управления 15 снижают задание по частоте до остановки асинхронного двигателя 5. По команде «Пуск» блоком управления 15 осуществляют пуск с текущих значений напряжения и частоты, что позволяет исключить сложный алгоритм вычисления текущей частоты в режиме «выбега» асинхронного двигателя 5.
Предлагаемый способ управления асинхронным двигателем реализован в опытных вспомогательных преобразователях частоты нового магистрального тепловоза 2ТЭ25АМ 001 и показал свою надежность и эффективность.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2361356C1 |
| СПОСОБ УПРАВЛЕНИЯ ЧАСТОТНЫМ ЭЛЕКТРОПРИВОДОМ | 2016 |
|
RU2654762C2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Система частотно-регулируемого асинхронного электропривода крано-манипуляторной установки (Система ЧРАП КМУ) | 2023 |
|
RU2820159C1 |
| Асинхронный частотно-регулируемый электропривод | 1983 |
|
SU1153386A1 |
| Способ устранения автоколебаний асинхронного двигателя | 1974 |
|
SU532167A1 |
| Частотно-регулируемый электропривод | 1978 |
|
SU744886A1 |
| Способ реверса асинхронного электродвигателя и устройство для его осуществления | 1980 |
|
SU970620A1 |
| Способ управления синхронным электродвигателем на постоянных магнитах | 2018 |
|
RU2683586C1 |
Изобретение относится к области электротехники и может быть использовано в управляемых асинхронных двигателях. Техническим результатом является упрощение алгоритма управления асинхронным двигателем при наборе и сбросе заданной частоты вращения и при пуске асинхронного двигателя на «выбеге». В способе управления, осуществляемом в соответствии с формулой изобретения, останавливают изменение задания по частоте при изменении входного переменного напряжения в широких пределах или изменении значения задания по частот; когда ток или напряжение в звене постоянного тока достигают своих критических значений, отключают инвертор от звена постоянного тока до тех пор, пока ток или напряжение в звене постоянного тока не станет ниже критического значения. При изменении задания по частоте, пуске и остановке асинхронного двигателя выходное напряжение и частоту изменяют по одному и тому же закону скалярного частотного управления. При выключении инвертора плавно снижают выходные напряжения и частоту до нуля, а при повторном пуске плавно разгоняют асинхронный двигатель с текущими значениями напряжения и частоты для исключения генераторного режима на «выбеге». 2 ил.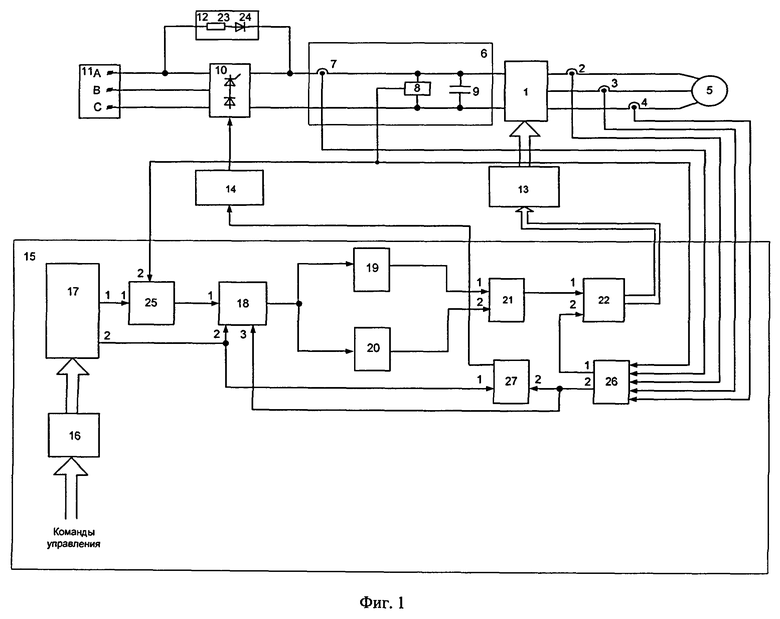
Способ управления асинхронным двигателем, при котором по заданному значению частоты вращения асинхронного двигателя и по принятому закону скалярного частотного управления асинхронным двигателем вычисляют амплитуду и угол положения вектора выходного напряжения автономного инвертора напряжения, которые преобразователем координат преобразуют в составляющие вектора выходного напряжения в неподвижных двухфазных координатах (Uα, Uβ), по которым генератором широтно-импульсной модуляции вырабатывают управляющие сигналы для автономного инвертора напряжения, которым из постоянного напряжения формируют выходное переменное напряжение с широтно-импульсной модуляцией, останавливают изменение задания по частоте при изменении входного переменного напряжения в широких пределах или изменении значения задания по частоте, когда ток или напряжение в звене постоянного тока достигают своих критических значений, и отключают автономный инвертор напряжения от звена постоянного тока до тех пор, пока ток или напряжение в звене постоянного тока не станет ниже критического значения, отличающийся тем, что при изменении задания по частоте, пуске и остановки асинхронного двигателя выходные напряжения и частоту изменяют по одному и тому же закону скалярного частотного управления, при этом при выключении автономного инвертора напряжения плавно снижают выходные напряжения и частоту до нуля, а при повторном пуске начинают плавный разгон асинхронного двигателя с текущих значений напряжения и частоты для исключения перехода его в генераторный режим на «выбеге».
| УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ | 2003 |
|
RU2257663C2 |
| СТАНЦИЯ УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2001 |
|
RU2219650C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2361356C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| СПОСОБ ИЗМЕРЕНИЯ РЕЗОНАНСНЫХ ЧАСТОТ | 2008 |
|
RU2377509C1 |
| ПОЛИ(МЕТ)АКРИЛАТНЫЕ СОПОЛИМЕРЫ С РАЗВЕТВЛЕННЫМИ С17 АЛКИЛЬНЫМИ ЦЕПЯМИ И ИХ ПРИМЕНЕНИЕ В КОМПОЗИЦИЯХ СМАЗОЧНОГО МАСЛА | 2017 |
|
RU2729517C2 |
| DE 10214622 A1, 21.11.2001 | |||
| JP 2007531478 A, 01.11.2007 | |||
| US 2004135533 A1, 15.07.2004 | |||
| WO 2005008890 A1, 27.01.2005 | |||

