Область техники
Настоящее изобретение относится к устройству погружения перемещающего типа для кузова автомобиля.
Уровень техники
Существует известное устройство погружения перемещающего типа, включающее в себя перемещающееся по конвейеру тело, перемещающееся вдоль ванны погружения и обработки, вал вращения, обеспеченный для перемещающегося по конвейеру тела и пересекающий ванну погружения и обработки в горизонтальном направлении, средство привода вала вращения, обеспеченное для перемещающегося по конвейеру тела и вращательно приводящее вал вращения, в котором обрабатываемое изделие, поддерживаемое средством поддержки изделия, может быть погружено в ванну погружения и обработки вращением вала вращения, как описано в патентном документе 1.
[Документы предшествующего уровня техники]
Патентный Документ 1: Японская опубликованная нерассмотренная патентная заявка №2008100223
Задачи, решаемые изобретением
Когда этот тип устройства погружения перемещающего типа используется в системе окраски кузова автомобиля, длинный и крупногабаритный кузов автомобиля вращается вокруг вала вращения, расположенного ниже кузова автомобиля, пока он поддерживается в направлении его длины, параллельной направлению транспортировки, как обычно известно. Таким образом, линия пути вращения кузова автомобиля, когда он вращается для того, чтобы быть погруженным в ванну погружения и обработки, выступает больше вперед и назад, чем местоположения передних и задних концов кузова автомобиля, когда он поддерживается перемещающимся по конвейеру телом. Следовательно, чтобы предотвратить от сталкивания вращающийся кузов автомобиля с кузовами автомобилей, поддерживаемыми предшествующими и последующими перемещающимися по конвейеру телами, необходимо значительно увеличить шаг между перемещающимися по конвейеру телами по сравнению с полной длиной кузова автомобиля. В результате снижается не только эффективность транспортировки, но и увеличивается полная длина ванны погружения и обработки, вследствие чего увеличиваются затраты на оборудование и производственные затраты.
Средство для решения задач
Соответственно, настоящее изобретение предлагает устройство погружения перемещающего типа, допускающее решение вышеописанных традиционных задач. Устройство погружения перемещающего типа по первому аспекту настоящего изобретения, описанное со ссылочными позициями в круглых скобках, использованных в детальном описании варианта осуществления, описанного ниже для того, чтобы облегчить понимание соответствия с вариантом осуществления, включает в себя перемещающееся по конвейеру тело (1), перемещающееся вдоль ванны (2) погружения и обработки, вал (11) вращения, обеспеченный для перемещающегося по конвейеру тела (1) и проходящий горизонтально над ванной (2) погружения и обработки, приводящее средство (16) вала вращения, обеспеченное для перемещающегося по конвейеру тела (1) и вращательно приводящее вал (11) вращения, и средство (15) поддержки изделия (15), обеспеченное для вала (11) вращения, в котором обрабатываемое изделие (W), поддерживаемое средством (15) поддержки изделия, может быть погружено в ванну (2) погружения и обработки при вращении вала (11) вращения, притом устройство дополнительно включает в себя подвижное основание (5), обеспеченное на перемещающемся по конвейеру теле, передвигающееся в направлении назад и вперед по направлению перемещения перемещающегося по конвейеру тела (1) и поддерживающее вал (11) вращения, и приводящее средство (20) подвижного основания, осуществляющее передвижение назад и вперед подвижного основания (5) в отношении перемещающегося по конвейеру тела (1).
При выполнении настоящего изобретения, более точно, как описано во втором аспекте, приводящее средство (20) подвижного основания может быть образовано вращающимся плечом (21), поддерживающимся на подвижном основании (5) и вращающимся вокруг горизонтальной оси, параллельной валу (11) вращения, синхронно с валом (11) вращения, и механизмом (22), преобразующим вращение в прямолинейное возвратно-поступательное движение для преобразования вращательного движения вращающегося плеча (21) в возвратно-поступательное движение поворотного основания (5) по отношению к перемещающемуся по конвейеру телу (1). Поскольку в этом случае требуется механизм (22), преобразующий вращение в прямолинейное возвратно-поступательное движение, возможно множество конфигураций, как, например, конфигурация соединения шпинделем свободного конца вращающегося плеча (21) и свободного конца длинного звена, шарнирно поддерживаемого в неподвижно закрепленном положении на перемещающемся по конвейеру теле (1) на расстоянии в направлении назад и вперед в отношении пространства вращения вращающегося плеча (21). Однако предпочтительнее использовать механизм (22), преобразующий вращение в прямолинейное возвратно-поступательное движение, образованный направляющим рельсом (23), смонтированным на перемещающееся по конвейеру тело (1) в вертикальном направлении сверху вниз так, чтобы сочленяться с вращающимся плечом (21) и подъемным элементом (24), прикрепленным к свободному концу вращающегося плеча (21), входящим в зацепление с направляющим рельсом (23) с возможностью подъема, как описано в третьем аспекте.
Дополнительно, не приводящее средство (20) подвижного основания, состоящее из вращающегося плеча (21) и механизма (22), преобразующего вращение в прямолинейное возвратно-поступательное движение, как описано выше, а приводящее средство (31) подвижного основания, предоставленное с приводящим вращающим телом (цепью, ремнем, тросом, ведущей шестерней, зацепленной с кремальерой) (30), приводимое другим двигателем (29), отдельным от двигателя (18) приводящего средства (16) вала вращения, может быть использовано в качестве приводящего средства подвижного основания, как описано в четвертом аспекте.
Результаты изобретения
Когда изделие, например кузов автомобиля, поддерживаемое средством поддержки изделия, вращается в направлении вперед с понижением при помощи привода вала вращения в закрепленном неподвижно местоположении на перемещающемся по конвейеру теле для того, чтобы быть погруженным в ванну погружения и обработки, местоположение переднего конца кузова автомобиля во время вращения выступает больше вперед, чем местоположение переднего конца кузова автомобиля во время горизонтальной поддержки над валом вращения в неподвижно закрепленном местоположении. Согласно конфигурации по первому аспекту настоящего изобретения, однако, местоположение вала вращения передвигается назад по перемещающемуся по конвейеру телу под действием приводящего средства подвижного основания на столько, на сколько местоположение переднего конца вращающегося кузова автомобиля выступает вперед. Когда вращающийся кузов автомобиля вращается из вертикального положения по направлению к горизонтальному положению верхней стороной вниз, местоположение вала вращения передвигается вперед по перемещающемуся по конвейеру телу и возвращается в его исходное местоположение. Дополнительно, когда вращающийся кузов автомобиля вращается по направлению вверх в вертикальное положение из положения верхней стороной вниз, местоположение вала вращения передвигается вперед от его исходного местоположения по перемещающемуся по конвейеру телу на столько, на сколько местоположение переднего конца вращающегося кузова автомобиля выступает назад. На последнем этапе, где вращающийся кузов автомобиля вращается из вертикального положения по направлению к его исходному горизонтальному положению поддержки, местоположение вала вращения передвигается назад по перемещающемуся по конвейеру телу и возвращается в его исходное местоположение. Таким образом, подвижное основание передвигается назад и вперед, посредством чего выступающие вперед и назад участки линии пути вращения кузова автомобиля, при наблюдении с перемещающегося по конвейеру тела, могут быть полностью устранены.
Более точно, в соответствии с конфигурацией настоящего изобретения, выступающие вперед и назад участки линии пути вращения кузова автомобиля, когда они наблюдаются с перемещающегося по конвейеру тела, могут быть полностью устранены передвижением подвижного основания, которое поддерживает вал вращения, назад и вперед приводящим средством подвижного основания, в зависимости от изменения в угле вращения вала вращения (кузова автомобиля). В результате может быть устранено ограничение того, что шаг между перемещающимися по конвейеру телами должен быть значительно расширен по сравнению с полной длиной кузова автомобиля для того, чтобы предотвратить сталкивание кузова автомобиля с кузовами автомобилей, поддерживаемых на предыдущем и последующем перемещающихся по конвейеру телах как в традиционном случае. Соответственно, не только может быть уменьшен шаг между перемещающимися по конвейеру телами для увеличения эффективности конвейерной доставки, но также может быть сокращена полная длина ванны погружения и обработки для уменьшения затрат на оборудование и эксплуатационные расходы.
Замечено, что когда приводящее средство подвижного основания сконфигурировано, как описано во втором аспекте, основной приводящий источник для приводящего средства вала вращения также используется в качестве приводящего источника для возвратно-поступательного движения подвижного основания. Таким образом, затраты на оборудование и эксплуатационные расходы могут быть дополнительно сокращены по сравнению со случаем, в котором требуется приводящий источник, как, например, двигатель выделенный для приводящего средства подвижного основания. В соответствии с конфигурацией, как описано в третьем аспекте, полная длина перемещающегося по конвейеру тела может поддерживаться в качестве минимального значения, достаточного для обеспечения траектории движения вперед и назад подвижного основания по сравнению с конфигурацией, требующей горизонтальных длинных звеньев на передней и задней частях обращающегося плеча.
Как само собой разумеющееся, приводящее средство подвижного основания может быть выполнено, как описано в четвертом аспекте, посредством чего допуская упрощение конфигурации перемещающегося по конвейеру тела.
Краткое описание чертежей
Фиг. 1 - вид спереди в частичном продольном разрезе, показывающий один вариант осуществления настоящего изобретения;
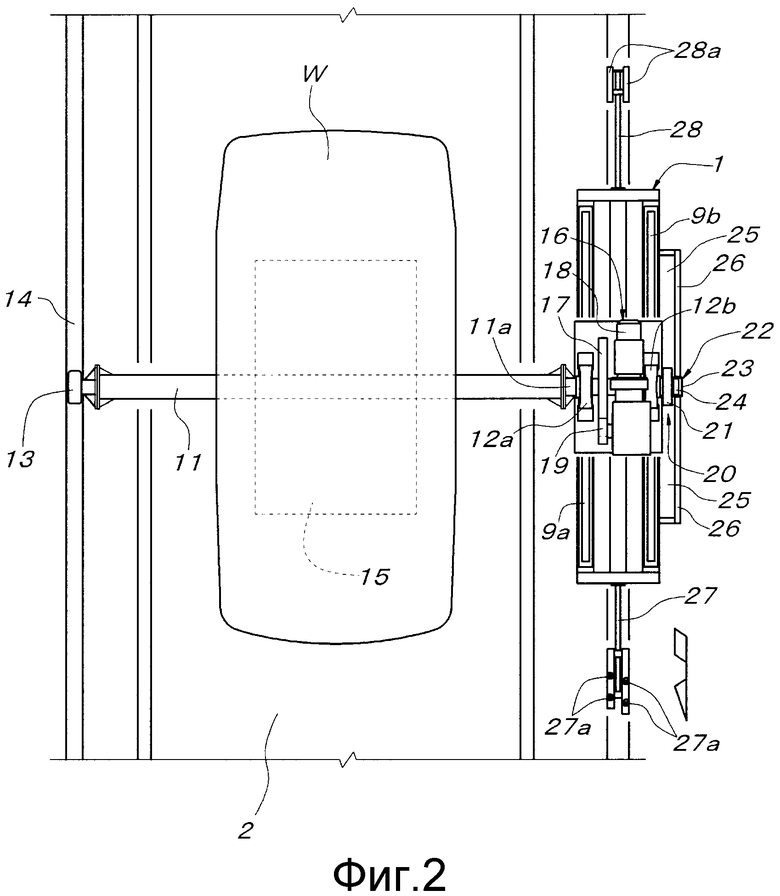
Фиг. 2 - его вид сверху;
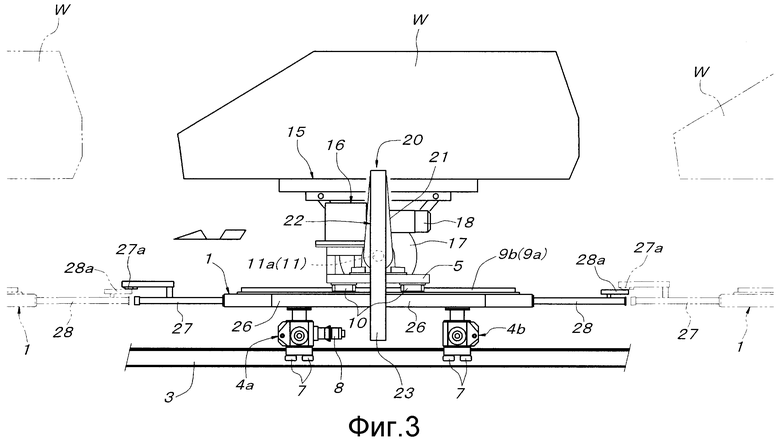
Фиг. 3 - вид сбоку за исключением ванны погружения и обработки;
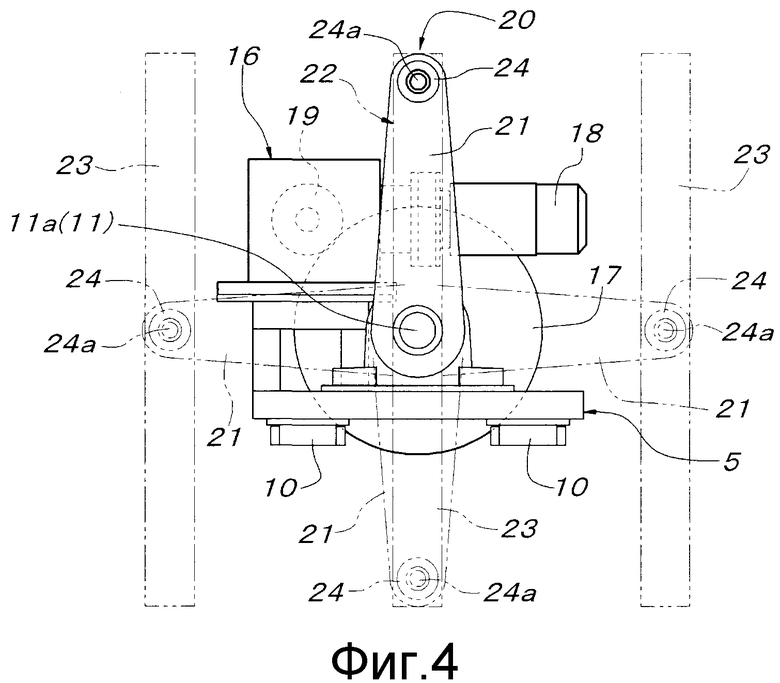
Фиг. 4 - вид сбоку, показывающий конфигурацию подвижного основания;
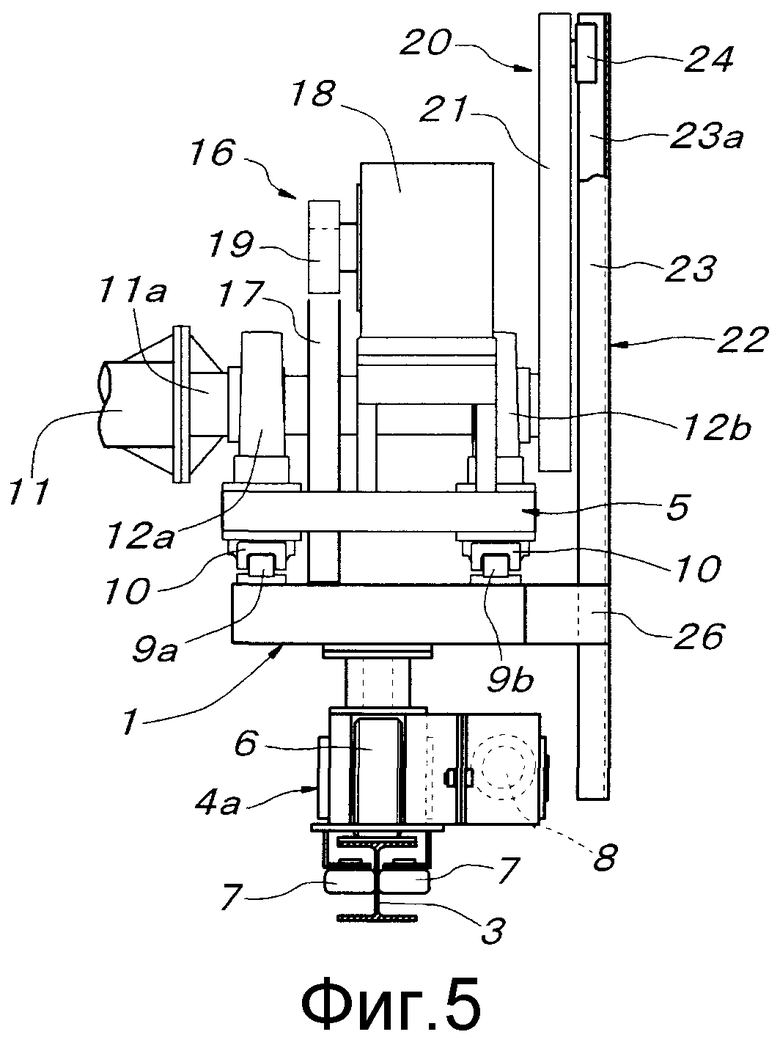
Фиг. 5 - увеличенный вид спереди главной части фиг. 1;
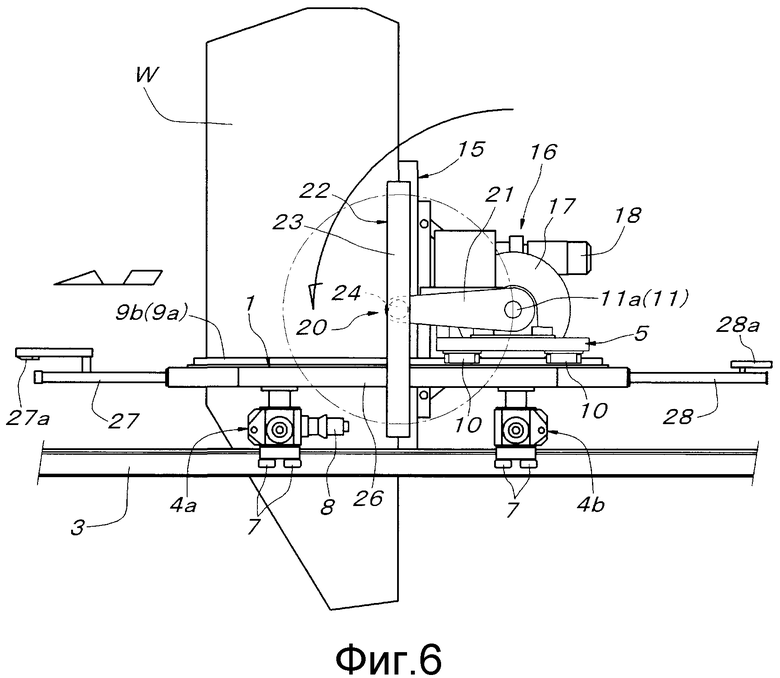
Фиг. 6 - вид сбоку, показывающий первый этап последовательности операций по погружению кузова автомобиля без ванны погружения и обработки;
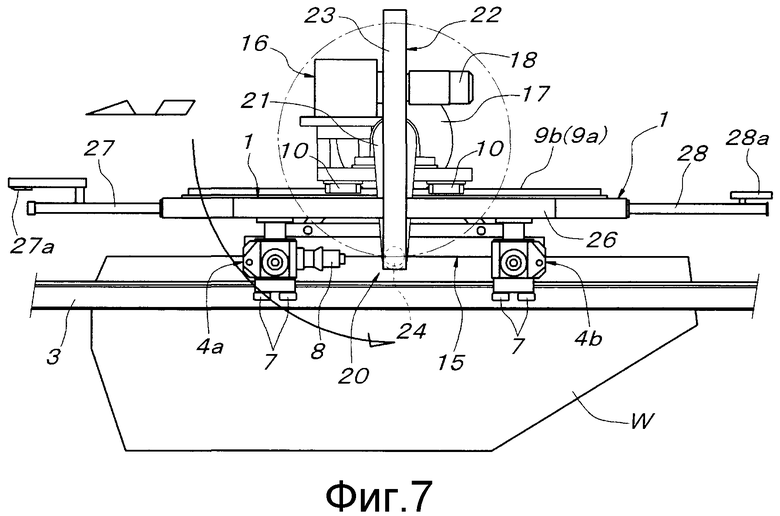
Фиг. 7 - вид сбоку, показывающий второй этап последовательности операций по погружению кузова автомобиля без ванны погружения и обработки;
Фиг. 7 - вид сбоку, показывающий третий этап последовательности операций по погружению кузова автомобиля без ванны погружения и обработки;
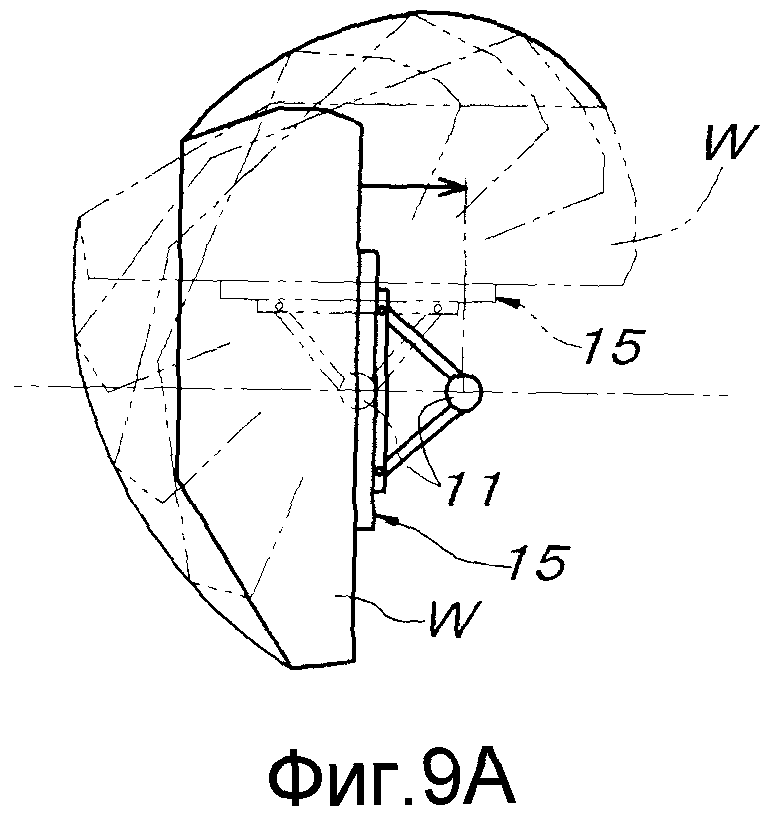
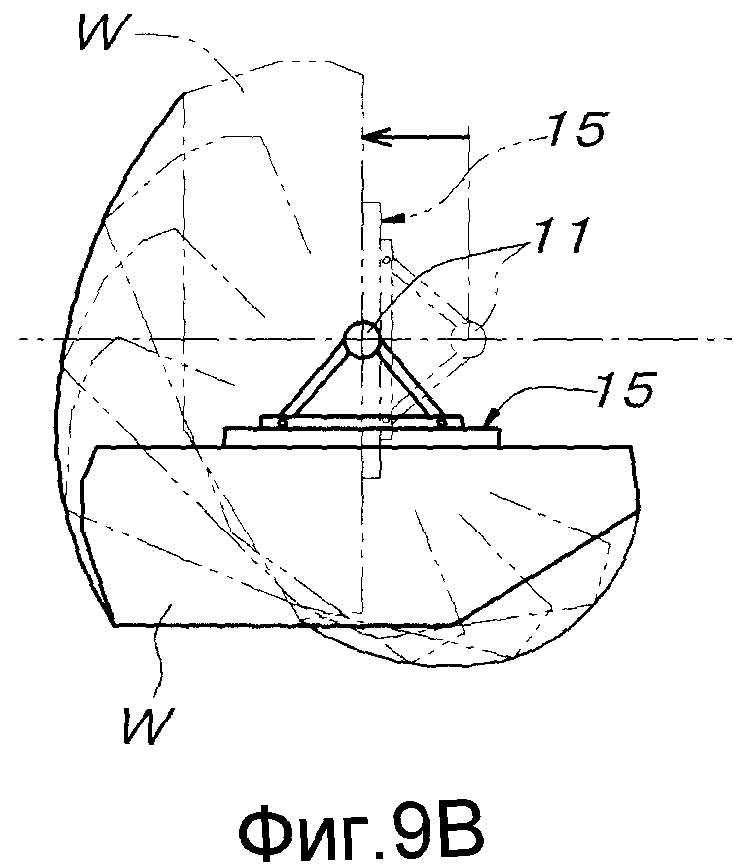
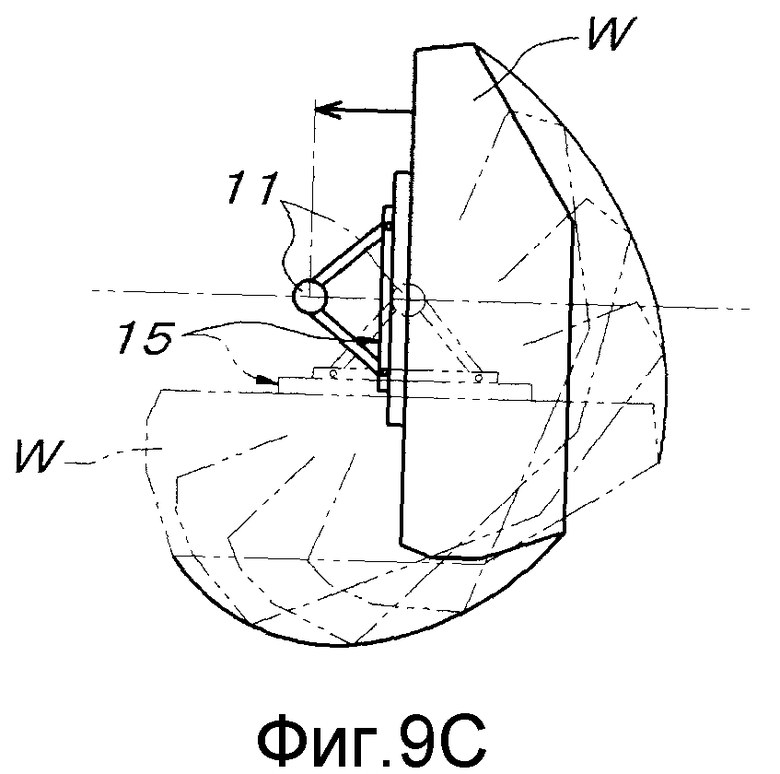
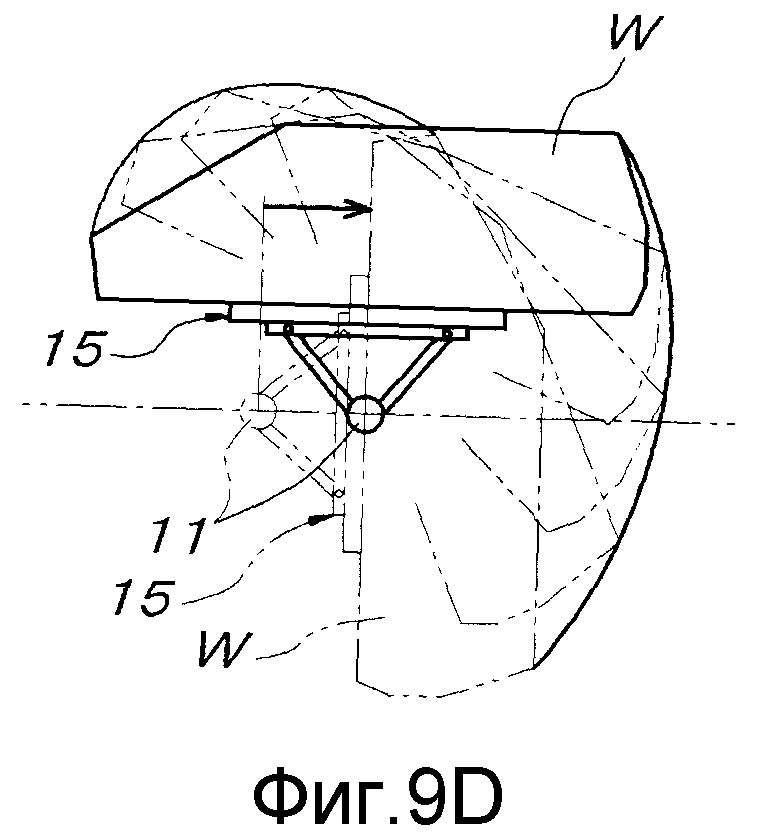
Фиг. с 9A по 9D - схематичные виды сбоку, объясняющие пути вращения кузова автомобиля в последовательности операций по погружению всего кузова автомобиля;
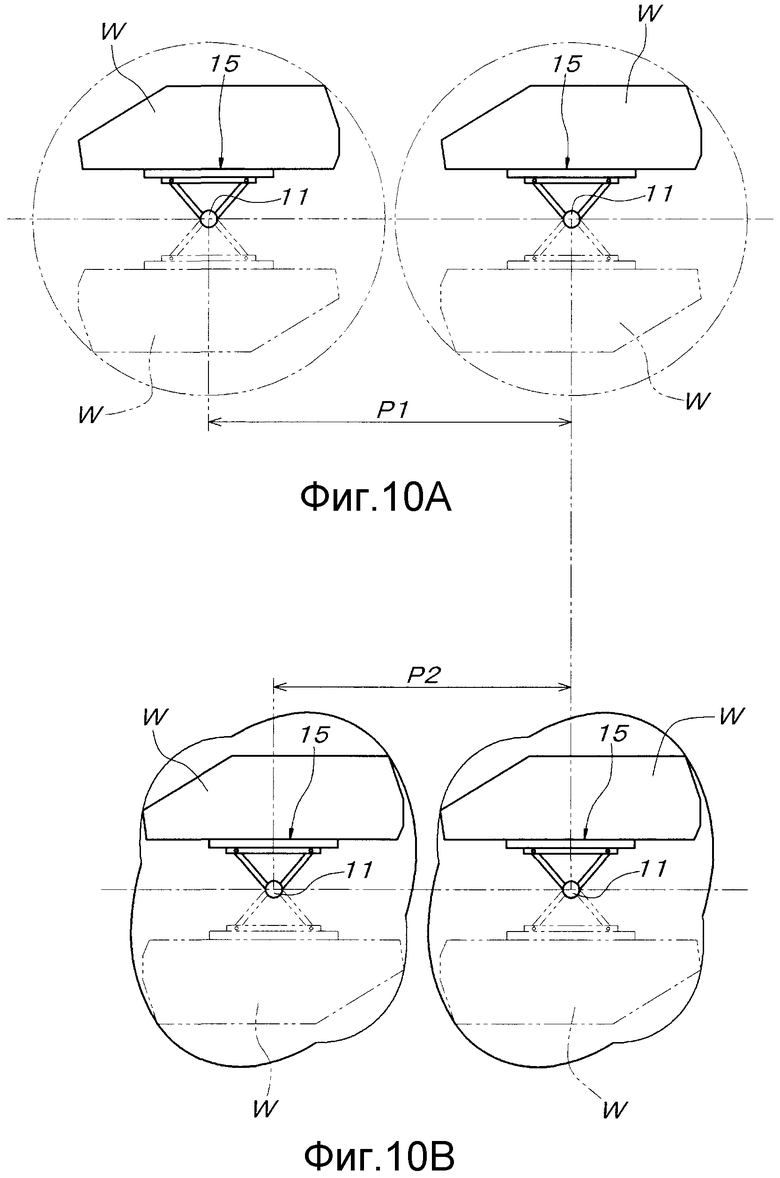
Фиг. 10А - схематичный вид сбоку, показывающий путь вращения кузова автомобиля, когда вал вращения не передвигается назад и вперед;
Фиг. 10B - схематичный вид сбоку, показывающий путь вращения кузова автомобиля, когда вал вращения передвигается назад и вперед;
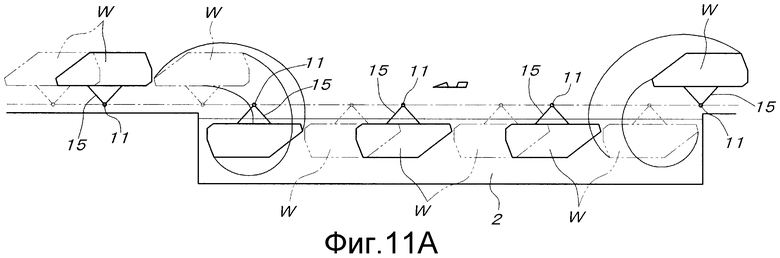
Фиг. 11А - схематичный вид сбоку, объясняющий путь передвижения кузова автомобиля в отношении ванны погружения и обработки, когда вал вращения не передвигается назад и вперед;
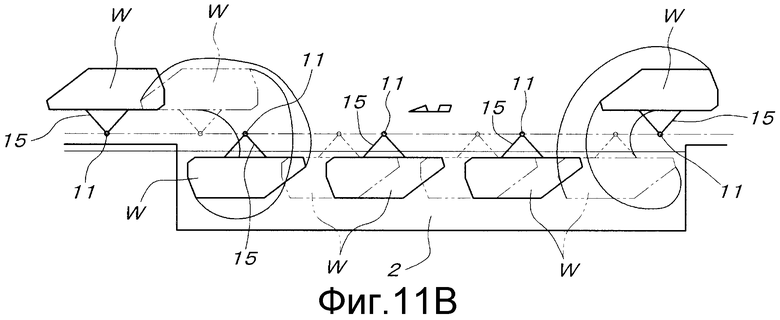
Фиг. 11B - схематичный вид сбоку, объясняющий путь передвижения кузова автомобиля в отношении ванны погружения и обработки, когда вал вращения передвигается назад и вперед;
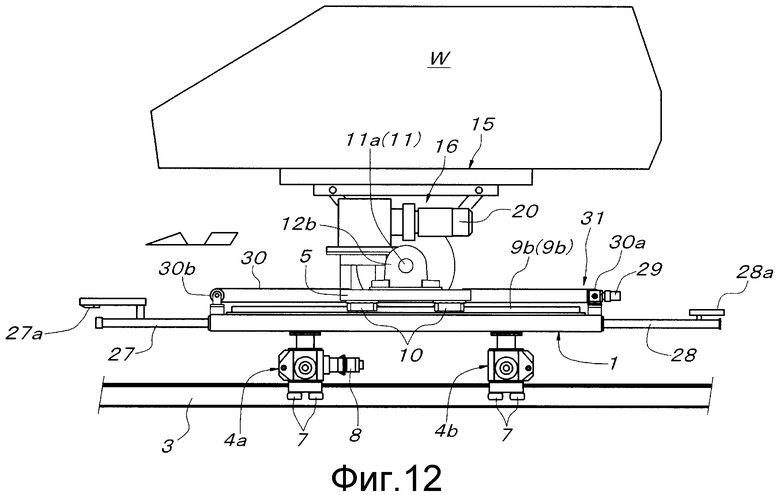
Фиг. 12 - вид сбоку, показывающий другой вариант осуществления настоящего изобретения за исключением ванны погружения и обработки;
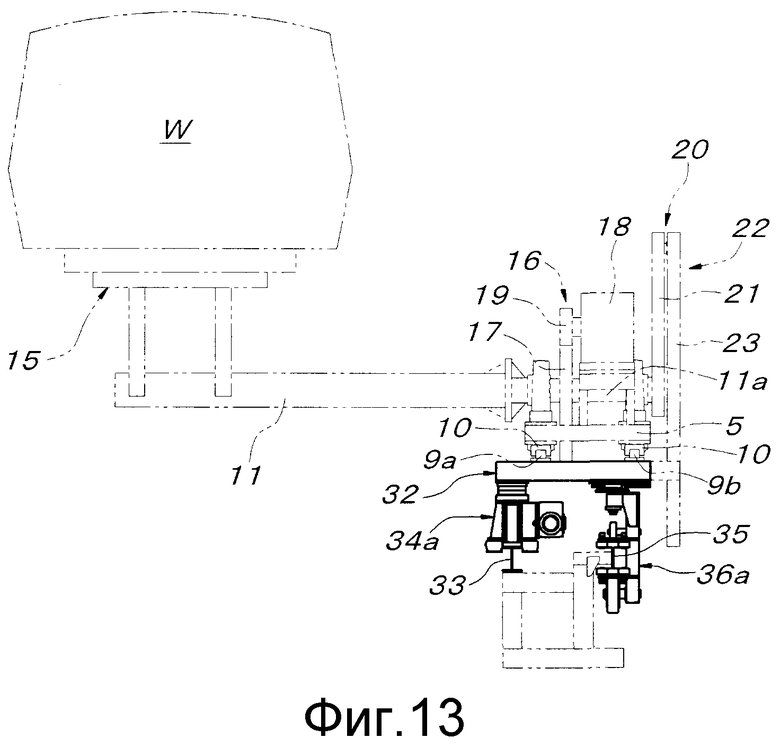
Фиг. 13 - вид спереди главной части, показывающий модификацию перемещающегося по конвейеру тела в одном варианте осуществления настоящего изобретения;
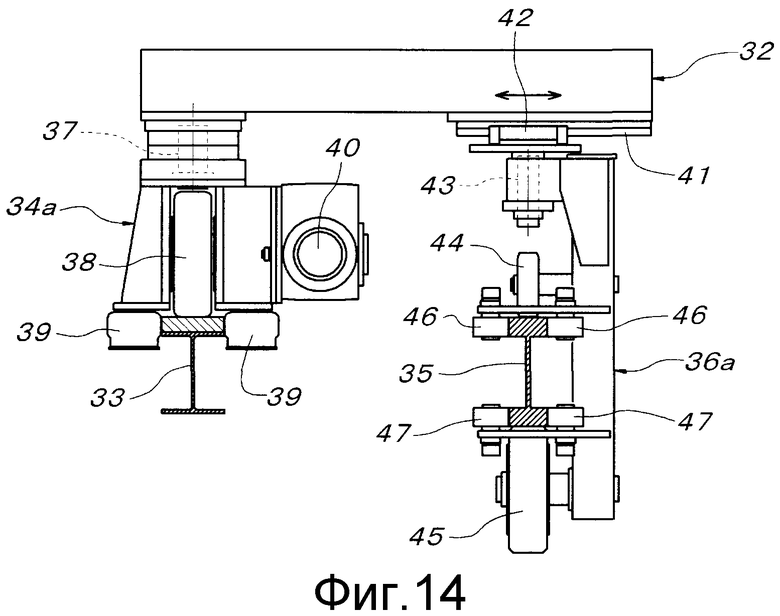
Фиг. 14 - увеличенный вид спереди вышеупомянутого модифицированного перемещающегося по конвейеру тела; и
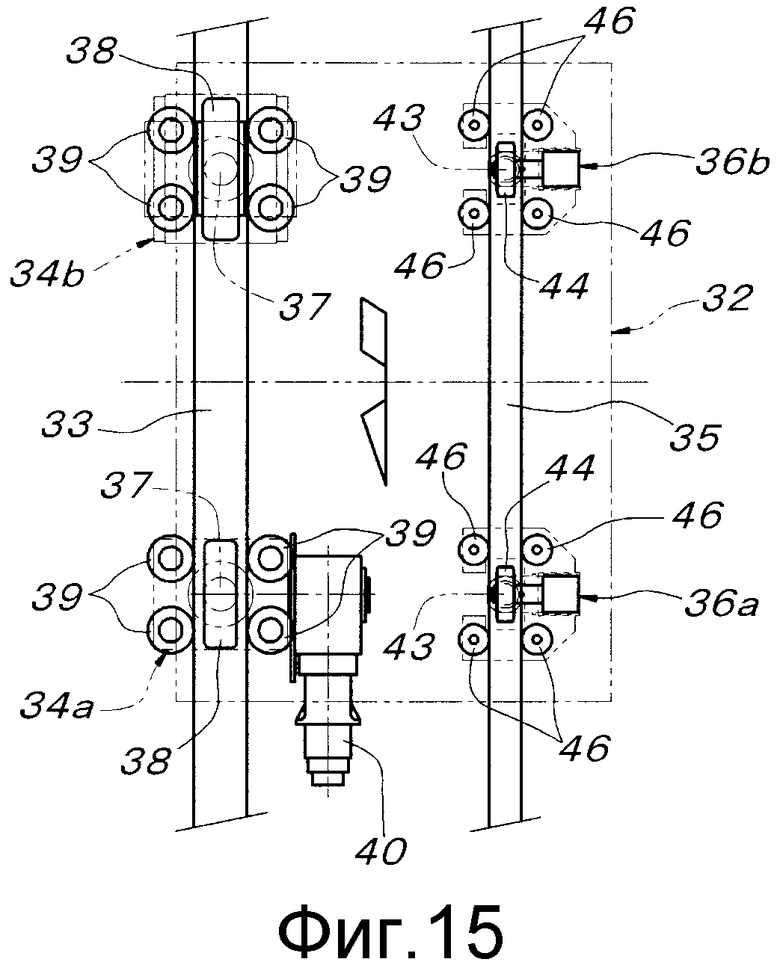
Фиг. 15 - вид сверху главной части вышеупомянутого модифицированного перемещающегося по конвейеру тела.
Описание предпочтительных вариантов осуществления изобретения
Один вариант осуществления настоящего изобретения будет описан со ссылкой на фиг. 1-5. Ссылочная позиция 1 обозначает перемещающееся по конвейеру тело. Ссылочная позиция 2 обозначает ванну погружения и обработки, которая размещена вдоль линии перемещения перемещающегося по конвейеру тела 1. Перемещающееся по конвейеру тело 1 включает в себя пару тележек 4а и 4b на нижних частях переднего и заднего его концов, при этом тележки 4а и 4b входят в зацепление с одним направляющим рельсом 3, лежащим на линии перемещения перемещающегося по конвейеру тела 1. Перемещающееся по конвейеру тело 1 включает в себя подвижное основание 5 на его верхней стороне. Передняя и задняя тележки 4а и 4b установлены с возможностью вращения вокруг вертикальной оси в отношении перемещающегося по конвейеру тела 1 и соответственно включают в себя опорное колесо 6, катящееся по верхней горизонтальной части направляющего рельса 3, использующего сталь сечения H, и пары левого и правого задающих положение роликов 7 на их передних и задних частях, помещающих между собой вертикальную пластину направляющего рельса 3 и вращающихся вокруг вертикальной оси, как показано на фиг. 5. Передняя тележка 4а обеспечена снаряженным редуктором скорости двигателем 8, приводящим во вращение ее опорное колесо 6. Следовательно, перемещающееся по конвейеру тело 1 может быть перемещено вперед вдоль направляющего рельса под действием снаряженного редуктором скорости двигателя 8 тележки 4а, приводящего во вращение опорное колесо 6. Перемещающееся по конвейеру тело 1 может плавно перемещаться даже по участку горизонтальной кривой линии вследствие поворота соответствующих тележек 4а и 4b вокруг вертикальной оси в отношении перемещающегося по конвейеру тела 1.
Подвижное основание 5 включает в себя направляющие 10 скольжения в четырех углах его нижней части, при этом направляющие скольжения 10 установлены на пару правого и левого рельсов 9а и 9b, направляющих скольжение, лежащих на перемещающемся по конвейеру теле 1 параллельно его направлению перемещения. Подвижное основание 5 поддерживается продольно с возможностью возвратно-поступательного движения, параллельного направлению перемещения перемещающегося по конвейеру тела 1. Приводящий вал 11а с возможностью самовращения поддерживается парой правых и левых подшипников 12а и 12b на верхней стороне подвижного основания 5. Приводящий вал 11а имеет один конец, концентрически соединенный с горизонтальным валом 11 вращения, пересекающим сверху ванну 2 погружения и обработки, размещенный на боковой стороне линии перемещения перемещающегося по конвейеру тела 1. Вал 11 вращения имеет свободный конец, соединенный с направляющим роликом 13, посредством чего направляющий рельс 14 для поддержки вала 11 вращения в горизонтальном положении лежит за пределами ванны 2 погружения и обработки на противоположной стороне линии перемещения перемещающегося по конвейеру тела 1. На продольно центральном участке вала 11 вращения, т.е. в местоположении верхней стороны центрального участка направления ширины ванны 2 погружения и обработки, смонтировано средство 15 поддержки изделия для поддержки кузова W автомобиля, который должен быть обработан, таким образом, что продольное направление кузова W автомобиля становится параллельным направлению перемещения перемещаемого по конвейеру тела 1. Хотя подробная структура не показана, средство 15 поддержки изделия может надежно неподвижно закреплять кузов W автомобиля в состоянии, в котором поддерживаемый кузов W автомобиля может надежно вращаться вокруг вала 11 вращения при вращении вала 11 вращения традиционно известным образом.
Как показано на фиг. 4 и 5, вал 11 вращения приводится во вращение приводящим средством 16 вала вращения. Приводящее средство 16 вала вращения состоит из прямозубного колеса 17 большого диаметра, смонтированного с приводящим валом 11а и находящегося в среднем местоположении между парными правым и левым подшипниками 12а и 12b, снаряженного редуктором скорости двигателя 18, размещенного на подвижном основании 5, и прямозубного колеса 19 небольшого диаметра, смонтированного с выводным валом снаряженного редуктором скорости двигателя 18 и зацепленного с прямозубным колесом 17 большого диаметра.
Подвижное основание 5 побуждается к движению назад и вперед приводящим средством 20 подвижного основания. Приводящее средство 20 подвижного основания состоит из вращающегося плеча 21, неподвижно закрепленного со свободным концом приводящего вала 11а под прямым углом, и механизма 22, преобразующего вращение в прямолинейное возвратно-поступательное движение, для взаимно-однозначного преобразования вращательного движения в возвратно-поступательное движение подвижного основания 5 в отношении перемещающегося по конвейеру тела 1. Механизм 22, преобразующий вращение в прямолинейное возвратно-поступательное движение, состоит из вертикального направленного сверху вниз направляющего рельса, неподвижно закрепленного на боковой части перемещающегося по конвейеру тела 1, с тем, чтобы примыкать наружной частью к пути вращения вращающегося плеча 21, и подъемного элемента 24, смонтированного со свободным концом вращающегося плеча 21 и входящего в зацепление с направляющим рельсом 23 с возможностью подъема. Более точно, направляющий рельс 23 включает в себя швеллер с канавкой 23а, расположенной на стороне вращающегося плеча 21. Подъемный элемент 24 включает в себя ролик, шарнирно поддерживающийся шпинделем 24а параллельно приводящему валу 11а и свободно с возможностью вращения и подъема установленный внутри канавки направляющего рельса 23. Направляющий рельс 23 имеет такую вертикальную длину, что подъемный элемент (ролик) 24 не выходит из его верхнего и нижнего концов, когда вращающееся плечо 21 делает один оборот. Направляющий рельс 23 в местоположении посредника прикрепляется к перемещающемуся по конвейеру телу 1 поддерживающим элементом 26, который образует пространство 25 вращения вращающегося плеча 21 между боковой поверхностью перемещающегося по конвейеру тела 1 и им самим, как показано на фиг. 2.
В направлении назад и вперед выступающим образом соответственно на переднем и заднем концах перемещающегося по конвейеру тела 1 предоставлены балки 27 и 28, продолжающиеся на требуемую длину, как показано на фиг. 2 и фиг. 3. Датчик 27а предотвращения столкновений прикреплен к верхней стороне переднего конца передней балки 27, а часть 28а, которая должна быть детектирована, прикрепляется к верхней стороне заднего конца задней балки 28. Когда перемещающееся по конвейеру тело 1 достигает предшествующего перемещающегося по конвейеру тела 1, перемещающегося непосредственно перед ним в пределах определенного расстояния, датчик 27а предотвращения столкновений заходит на часть 28а, которая должна быть детектирована, находящуюся на задней балке 28 предшествующего перемещающегося по конвейеру тела 2, и в этот момент детектирует часть 28а, которая должна быть детектирована. Последующее перемещающееся по конвейеру тело 1 с датчиком 27а предотвращения столкновений, детектировавшее предшествующее перемещающееся по конвейеру тело 1, управляется так, чтобы замедлить скорость и остановиться на основе сигнала детектирования, посредством чего для перемещающихся по конвейеру тел 1, перемещающихся с примыкающими задними и передними частями, может быть предотвращено чрезмерное приближение друг к другу, а перемещающееся по конвейеру тело 1, следующее за перемещающимся по конвейеру телом 1, в случае заминок может быть автоматически остановлено на определенном расстоянии.
В устройстве погружения перемещающего типа, сконфигурированном таким образом, кузов W автомобиля, который является изделием, которое должно быть обработано, поддерживается горизонтально над валом 11 вращения средством 15 поддержки изделия, причем его передний конец ориентируется на переднюю сторону направления движения, как показано на фиг. 3. В этом случае вращающееся плечо 21 находится в вертикальном верхнем положении, подъемный элемент (ролик) 24 на его свободном конце устанавливается в местоположение в окрестности верхнего конца направляющего рельса 23, а подвижное основание 5 находится в исходном местоположении, которое находится по существу в центре его диапазона движения назад и вперед.
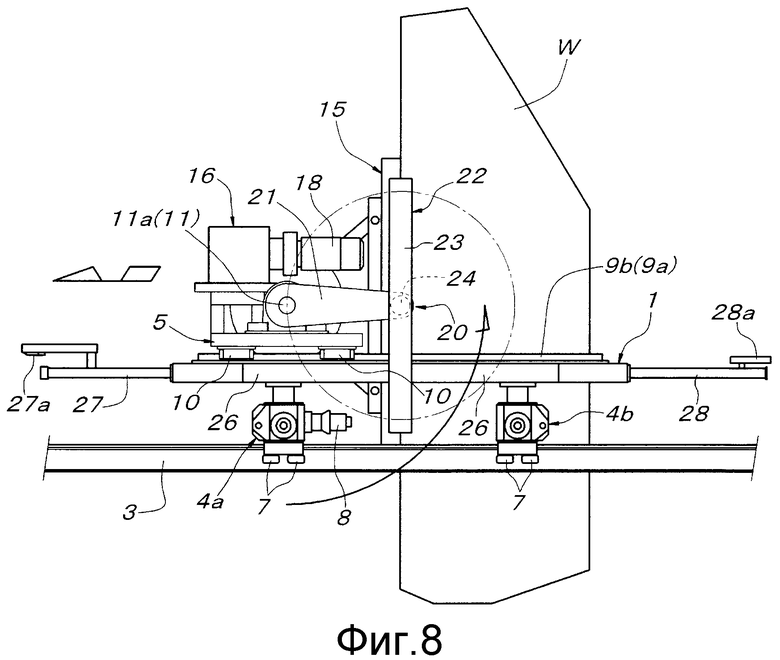
В этом состоянии снаряженный редуктором скорости двигатель 18 приводящего средства 16 вала вращения работает для того, чтобы вращать вал 11 вращения посредством приводящего вала 11а в таком направлении, что кузов W автомобиля вращается вокруг вала 11 вращения, причем его передний конец опускается. Затем наряду с вращением вращающегося плеча 21, которое вращается совместно с валом 11 вращения, подвижное основание 5 скользит назад, пока подъемный элемент 24 на свободном конце вращающегося плеча 21 не опустится вдоль направляющего рельса 23. Когда вал 11 вращения (вращающееся плечо 21) поворачивается на 90 градусов, подвижное основание 5 достигает местоположения его предельного рубежа продвижения назад, и кузов W автомобиля принимает перевернутое направленное вниз положение, как показано на фиг. 6 (фиг. 9А). Когда вал 11 вращения (вращающееся плечо 21) поворачивается на 180 градусов, подвижное основание 5 скользит вперед и возвращается в его первоначальное исходное местоположение, а кузов W автомобиля принимает перевернутое верхней стороной вниз положение, как показано на фиг. 7. В это время вращающееся плечо 21 принимает вертикально нижнее положение, а подъемный элемент (ролик) 24 на его свободном конце устанавливается в местоположении окрестности нижнего конца направляющего рельса 23. Более того, когда вал 11 вращения (вращающееся плечо 21) поворачивается на 270 градусов, подвижное основание скользит вперед от его исходного местоположения и достигает его местоположения предельного рубежа продвижения, а кузов W автомобиля принимает перевернутое вверх положение, как показано на фиг. 8 (фиг. 9С). Когда вал 11 вращения (вращающееся плечо 21) поворачивается на 360 градусов и завершает оборот, подвижное основание 5 скользит назад и возвращается в исходное местоположение, а кузов W автомобиля принимает первоначальное горизонтальное положение, обращенное вперед, как показано на фиг. 6 (фиг. 9D).
Когда вал 11 вращения побуждается выполнить поворот для вращения кузова W автомобиля вокруг вала 11 вращения на 360 градусов, как описано выше, кузов W автомобиля выполняет одно движение назад и вперед в окрестности исходного местоположения в отношении перемещающегося по конвейеру тела 1 вместе с валом 11 вращения таким образом, чтобы скользить назад, когда его передний конец вращается вниз, и чтобы скользить вперед, когда его передний конец вращается вверх. Более точно, по сравнению со случаем, когда вал 11 вращения вращается в неподвижно закрепленном местоположении без движения назад и вперед в отношении перемещающегося по конвейеру тела 1, как показано на фиг. 10А, линия пути вращения мест кузова автомобиля, наиболее удаленных от вала 11 вращения, по вертикали становится длинной, а выступающие в направлении вперед и назад участки остаются небольшими, как показано на фиг. 10B. Соответственно, когда шаг между перемещающимися по конвейеру телами 1 устанавливается так, чтобы предотвратить возможность того, чтобы кузова W автомобилей на примыкающих перемещающихся по конвейеру телах 1 приходили бы в соприкосновение друг с другом, несмотря на синхронность вращения кузовов W автомобилей, другими словами, так чтобы линии путей вращения кузовов W автомобилей на соответствующих перемещающихся по конвейеру телах 1 не пересекались друг с другом и чтобы были на отдалении при сохранении интервала безопасности спереди и сзади, шаг P2 между перемещающимися по конвейеру телами 1 может быть уменьшен в устройстве настоящего изобретения, как показано на фиг. 10B, в отношении традиционного шага P1 между перемещающимися по конвейеру телами 1, как показано на фиг. 10А.
Как показано на фиг. 11, перемещающееся по конвейеру тело 1, поддерживающее кузов W автомобиля горизонтально обращенным в направлении вперед над валом 11 вращения с возможностью вращения, приводит вал 11 вращения, как описано выше, с момента достижения им при перемещении начала верхней области ванны 2 погружения, посредством чего кузов W автомобиля, передвигающийся вперед совместно с перемещающимся по конвейеру телом 1, может быть погружен в обрабатывающую жидкость, находящуюся в пределах ванны 2 погружения и обработки, за время одного вращения вокруг вала 11 вращения. Когда устройство погружения перемещающего типа сконфигурировано так, что длина ванны 2 погружения и обработки устанавливается таким образом, как, например, показано в примере, так что кузов W автомобиля вращается вниз в начале ванны 2 погружения и обработки, и погружение начинается, так что кузов W автомобиля перемещается вперед в положении переворота верхней стороной вниз на около 2,5 длин шага между перемещающимися по конвейеру телами 1, как показано на фиг. 7 (фиг. 9B), и так что погруженный кузов W автомобиля вращается вверх из конца ванны 2 погружения и обработки и выходит из обрабатывающей жидкости, полная длина ванны 2 обработки и погружения, требуемая в случае, когда перемещающееся по конвейеру тело 1 непрерывно перемещается при коротком шаге P2, может быть сокращена в отношении полной длины ванны 2 погружения и обработки, требуемой, когда перемещающееся по конвейеру тело 1 непрерывно перемещается при традиционном шаге P1, как показано на фиг. 11А, поскольку шаг P2 между перемещающимися по конвейеру телами 1 может быть уменьшен, как описано выше. Замечено, что продолжительность времени погружения кузова W автомобиля в обрабатывающую жидкость становится короткой в конфигурации использования ванны 2 погружения и обработки с короткой полной длиной, если скорости перемещения перемещающихся по конвейеру тел 1 являются одинаковыми. Таким образом, чтобы продолжительность погружения кузова W автомобиля в обрабатывающую жидкость стала такой же длинной, как традиционная продолжительность, необходимо уменьшить всего лишь скорость перемещения перемещающихся по конвейеру тел 1 в жидкости.
В вышеописанном варианте осуществления подвижное основание 5, поддерживающее вал 11 вращения, сконфигурировано, чтобы передвигаться назад и вперед, используя вращающую силу вала 11 вращения (вращательную силу приводящего средства 16 вала вращения). Однако, как показано на фиг. 12, можно заставить подвижное основание двигаться назад и вперед только приводящим средством 31 подвижного основания, предоставленным с приводящим вращающимся телом 30, приводимым другим двигателем 29, отличным от снаряженного редуктором скорости двигателя 18 приводящего средства 16 вала вращения. В варианте осуществления, как показано на фиг. 12, приводящее вращающееся тело 30 применяет натягивающееся вращающееся тело (например, цепь, ремень или трос), натянутое между вращающимся телом (например, зубчатым колесом или шкивом) 30а, шарнирно поддерживаемым на одном из двух крайних концов траектории движения вперед и назад подвижного основания 5 и вращательным образом приводимым двигателем 29, и вращающимся телом (таким, как зубчатое колесо или шкив) 30b, шарнирно поддерживаемым на другом крайнем конце траектории движения назад и вперед подвижного конца 5, натягивающееся вращающееся тело, имеющее часть, входящую в зацепление с подвижным основанием 5. Также в качестве приводящего вращающегося тела может быть использована ведущая шестерня, которая шарнирно поддерживается на подвижном основании 5 так, чтобы зацепляться с кремальерой, лежащей на перемещающемся по конвейеру теле 1 вдоль траектории движения назад и вперед подвижного основания и приводимой двигателем. Более того, в случае когда приводящее средство подвижного основания использует кремальеру и ведущую шестерню, ведущая шестерня может шарнирно поддерживаться в неподвижно закрепленном местоположении на перемещающемся по конвейеру теле 1, а кремальера может быть неподвижно закреплена на подвижном основании 5.
Когда используется вышеописанное приводящее средство 31 подвижного основания, двигатель управляется с тем, чтобы обеспечить переключение направления движения подвижного основания 5 и чтобы изменить скорость наряду с изменением в угле поворота вала 11 вращения таким же образом, как в случае, когда подвижное основание 5 выполнено для движения назад и вперед, используя приводящее средство 20 подвижного основания вышеописанного варианта осуществления. Кроме того, когда кузов W автомобиля побуждают выполнить поворот вокруг вала 11 вращения при вращении вала 11 вращения, кузов W автомобиля выполняет одно движение назад и вперед от исходного местоположения в отношении перемещающегося по конвейеру тела 1 вместе с валом 11 вращения таким образом, чтобы скользить назад, когда его передний конец вращается вниз, и скользить вперед, когда его передний конец вращается вверх, как показано на фиг. 9. Линия пути вращения мест, наиболее удаленных от кузова автомобиля в отношении вала 11 вращения, в вертикальной проекции становится длинной, а выступающие в направлении вперед и назад участки могут остаться небольшими, как показано на фиг. 10B.
Конфигурация перемещающегося по конвейеру тела 1 не ограничена вышеописанным вариантом осуществления. Например, направляющий ролик 13, шарнирно поддерживаемый на свободном конце вала 11 вращения, поддерживается направляющим 14 рельсом с тем, чтобы в вышеупомянутом варианте осуществления вал 11 вращения имел оба поддерживаемых конца. Однако перемещающееся по конвейеру тело 1 может быть сконфигурировано обеспечением тележки, которая перемещается, входя в зацепление с направляющим рельсом 14 для поддержки свободного конца вала 11 вращения на тележке подшипником. Дополнительно, вал 11 вращения может поддерживаться только на стороне перемещающегося по конвейеру тела консольным образом, в зависимости от конфигурации перемещающегося по конвейеру тела 1.
Фиг. 13-15 иллюстрируют пример перемещающегося по конвейеру тела 32, поддерживающего вал 11 вращения консольным образом. Перемещающееся по конвейеру тело 32 включает в себя пару передней и задней тележек 34а и 34b, в зацеплении поддерживающихся на первом направляющем рельсе 33, расположенных внутри (на стороне, более ближней к ванне погружения и обработки), и пару передней и задней тележек 36а и 36b, в зацеплении поддерживаемых на втором направляющем рельсе 35, расположенных снаружи. Внутренние парные передняя и задняя тележки 34а и 34b поддерживаются на нижней части перемещающегося по конвейеру тела 32 с возможностью соответственного вращения вокруг вертикального шпинделя 37 и включают в себя опорное колесо 38, катящееся по верхней горизонтальной части направляющего рельса 33, и пару правого и левого задающих положение роликов 39 спереди и сзади, помещающих между собой первый направляющий рельс и имеющих возможность вращения вокруг вертикальной оси. Передняя тележка 34а обеспечена снаряженным редуктором скорости двигателем 40, приводящим во вращательное движение ее опорное колесо 38. Внешние тележки 36а и 36b поддерживаются с возможностью соответственного вращения вокруг вертикального шпинделя 43, на паре переднего и заднего двигающихся вбок оснований 42, предоставленных с возможностью движения вбок на нижней части перемещающегося по конвейеру тела 32 посредством рельса 41, направляющего скольжение. Тележки 36а и 36b соответственным образом включают в себя опорное колесо 44, катящееся по верхней горизонтальной части второго направляющего рельса 35, дублирующее колесо, примыкающее и катящееся по обратной стороне горизонтальной нижней части второго направляющего рельса 35, пару правого и левого задающих положение роликов 46 на его передней и задней части, помещающих между собой горизонтальную верхнюю часть второго направляющего рельса 35 и вращающихся вокруг вертикальной оси, и пары правого и левого задающих положение роликов 47 на его передней и задней части, помещающих между собой горизонтальную нижнюю часть второго направляющего рельса 35 и имеющих возможность вращаться вокруг вертикальной оси.
Хотя таким образом перемещающееся по конвейеру тело 32 поддерживается устойчиво и независимо первым и вторым направляющими рельсами 33 и 35, оно может перемещаться плавно даже по горизонтально скривленному участку пути, где первый и второй направляющие рельсы 33 и 35 горизонтально изгибаются, поскольку все тележки 34а, 34b, 36a и 36b могут вращаться вокруг вертикальных шпинделей 37 и 43, а внешние тележки 36а и 36b могут двигаться вбок при помощи двигающихся вбок оснований 42. Соответственно, вал 11 вращения может поддерживаться консольным образом на подвижном основании 5, поддерживаемом на перемещающемся по конвейеру теле 32 при помощи рельсов 9а и 9b, направляющих скольжение, и направляющих 10 скольжения, как в описанном выше варианте осуществления. Опрокидывающей момент, который действует на перемещающееся по конвейеру тело 32 весом кузова W автомобиля, воздействуя на вал 11 вращения, в тот момент приводя в контакт первый направляющий рельс 33 и опорные колеса 38 внутренних тележек 34а и 34b, служащих в качестве поддерживающих точек, принимается вторым направляющим рельсом 35 посредством дублирующих колес 45 внешних тележек 36а и 36b, посредством чего вал 11 вращения может двигаться вместе с перемещающимся по конвейеру телом 32, между тем, как поддерживается в горизонтальном положении.
Промышленная применимость
Устройство погружения перемещающего типа согласно настоящему изобретению может быть использовано в системе окраски кузова автомобиля в качестве средства вращения и погружения корпуса автомобиля, поддерживающегося на перемещающемся по конвейеру теле горизонтально при обращенном вперед направлении, в обрабатывающую жидкость во время транспортировки кузова автомобиля.
Перечень ссылочных позиций
W: Кузов автомобиля (деталь, которая должна быть обработана)
1, 32: Перемещающееся по конвейеру тело
2: Ванна погружения и обработки
3, 33, 35: Направляющий рельс
4a, 4b, 34a, 34b, 36a, 36b: Тележка
5: Подвижное основание
6, 38, 44: Опорное колесо
7, 39, 46, 47: Ролик, задающий положение
8, 18, 40: Снаряженный редуктором скорости двигатель
9a, 9b, 14: Рельс, направляющий скольжение
10: Направляющий скольжения
11: Вал вращения
11а: Приводящий вал
12a, 12b: Подшипник
13: Направляющий ролик
15: Средство поддержки детали
16: Приводящее средство вала вращения
17: Прямозубное колесо большого диаметра
19: Прямозубное колесо небольшого диаметра
20, 31: Приводящее средство подвижного основания
21: Вращающееся плечо
22: Механизм, преобразующий вращение в прямолинейное возвратно-поступательное движение
23: Направляющий рельс
23а: Канавка
24: Подъемный элемент (ролик)
26: Поддерживающий элемент
29: Двигатель
30: Приводящее вращающееся тело (цепь, ремень, трос и т.д.)
42: Двигающееся вбок основание
45: Дублирующее колесо
Устройство погружения перемещающего типа применяют в системе окраски кузова автомобиля в качестве средства для вращения и погружения кузова автомобиля, поддерживающегося на перемещающемся по конвейеру теле, в обрабатывающую жидкость. Устройство включает в себя перемещающееся по конвейеру тело (1), содержащее вал (11) вращения, проходящий горизонтально над ванной (2) с обрабатывающей жидкостью, приводящее средство (16) вала вращения, средство (15) поддержки изделия (W), которое может быть погружено в ванну при вращении вала. Устройство дополнительно включает в себя подвижное основание (5) на перемещающемся по конвейеру теле, подвижное в направлении назад и вперед направления перемещения тела и поддерживающее вал вращения, и приводящее средство (20) подвижного основания. Повышается эффективность размещения изделий на конвейере. 3 з.п. ф-лы, 20 ил.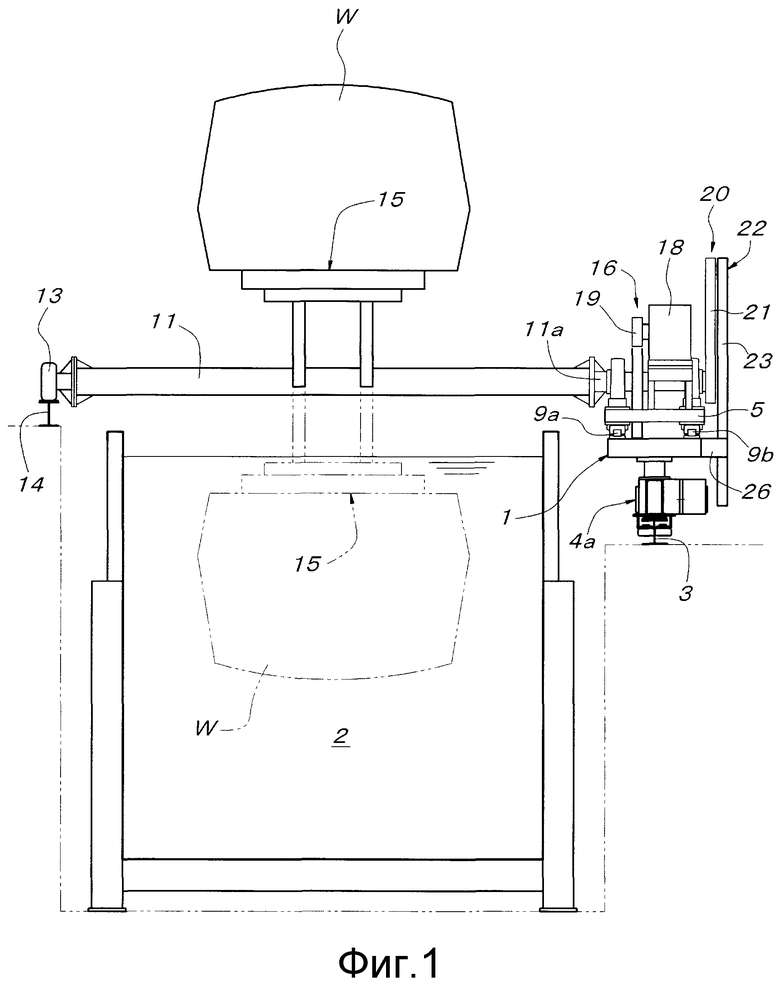
1. Устройство погружения перемещающего типа, содержащее:
перемещающееся по конвейеру тело (1), перемещающееся вдоль ванны (2) погружения и обработки;
вал (11) вращения, обеспеченный для перемещающегося по конвейеру тела (1) и проходящий горизонтально над ванной (2) обработки и погружения;
приводящее средство (16) вала вращения, обеспеченное для перемещающегося по конвейеру тела (1) и вращательно приводящее вал (1) вращения; и
средство (15) поддержки изделия, обеспеченное для вала (11) вращения;
при этом обрабатываемое изделие (W), поддерживаемое средством (15) поддержки изделия, может быть погружено в ванну (2) погружения и обработки вращением вала (11) вращения, причем устройство дополнительно содержит:
подвижное основание (5), обеспеченное на перемещающемся по конвейеру теле (1), выполненное с возможностью перемещения в направлении вперед и назад по направлению перемещения перемещающегося по конвейеру тела (1) и поддерживающее вал (11) вращения; и
приводящее средство (20) подвижного основания для выполнения движения назад и вперед подвижного основания (5) относительно перемещающегося по конвейеру тела (1).
2. Устройство по п.1, в котором приводящее средство (20) подвижного основания содержит вращающееся плечо (21), поддерживаемое на подвижном основании (5) и вращаемое вокруг горизонтальной оси, параллельной валу (11) вращения, синхронно с валом (11) вращения, и механизм (22), преобразующий вращение в прямолинейное возвратно-поступательное движение, для преобразования вращательного движения вращающегося плеча (21) в возвратно-поступательное движение подвижного основания (5) в отношении перемещающегося по конвейеру тела (1).
3. Устройство по п.2, в котором вращающееся плечо (21) имеет свободный конец, а механизм (22), преобразующий вращение в прямолинейное возвратно-поступательное движение, содержит направляющий рельс (23), смонтированный на перемещающееся по конвейеру тело (1) в вертикальном направлении сверху вниз с тем, чтобы сочленяться с вращающимся плечом (21), и подъемный элемент (24), прикрепленный к свободному концу вращающегося плеча (21), подъемным образом зацепляющийся с направляющим рельсом (23).
4. Устройство по п.1, в котором приводящее средство (20) подвижного основания выполнено с приводящим вращающимся телом (30), приводимым другим двигателем (29), отдельным от двигателя (18) приводящего средства (16) вала вращения.
| УСТАНОВКА ДЛЯ ОБРАБОТКИ ИЗДЕЛИЙ, ПРЕИМУЩЕСТВЕННО АВТОМОБИЛЬНЫХ КУЗОВОВ, ПРЕЖДЕ ВСЕГО ДЛЯ НАНЕСЕНИЯ ЛАКОКРАСОЧНОГО ПОКРЫТИЯ НА ИЗДЕЛИЯ, ПРЕИМУЩЕСТВЕННО НА АВТОМОБИЛЬНЫЕ КУЗОВА | 2001 |
|
RU2291829C2 |
| US 6659262 B2, 06.09.2001 | |||
| US 20040149542 A1, 05.08.2004 | |||
| УСТАНОВКА И СПОСОБ ТРАНСПОРТИРОВКИ ДЕТАЛЕЙ ВДОЛЬ УЧАСТКА ОБРАБОТКИ | 2005 |
|
RU2361800C2 |
| УСТРОЙСТВО И СПОСОБ ОБРАБОТКИ ПОВЕРХНОСТЕЙ ДЕТАЛЕЙ | 2003 |
|
RU2316398C2 |

