Изобретение относится к области неразрушающего контроля качества железнодорожных колес методом магнитопорошковой дефектоскопии с помощью средств автоматизации.
Известен способ по патенту RU №2020466, относящийся к магнитопорошковому контролю изделий крупной формы, следовательно, пригодный для использования для контроля поверхности железнодорожных колес. Согласно способу по патенту RU №2020466 выявляют дефекты участков поверхности с помощью намагничивания двумя источниками переменного поля, размещая их на поверхности изделия так, что в качестве зоны контроля используют участок между разноименными полюсами источников с созданными вихревыми токами магнитными линиями результирующего поля. При поливе магнитной суспензией поверхности исследуемого участка изделия определяют наличие дефектов. После исследования дефектов данного участка источники намагничивания переносят на другой участок поверхности изделия.
Применение известного способа не дает представления о контролируемой поверхности в целом, так как при переносе средств для намагничивания с участка на участок «теряются» зоны контроля между исследуемыми участками. И, напротив, для исключения указанной отрицательной особенности возможен многократный полив суспензией одного и того же участка поверхности изделия, захватывающего пропущенную для контроля зону, что, в свою очередь, приводит к затруднению формирования общего рисунка дефектов всей поверхности, подлежащей контролю.
Кроме того, при адаптации данного способа для применения в поточной линии контроля качества железнодорожных колес, такой способ характеризуется длительностью процесса контроля боковых поверхностей железнодорожного колеса.
Известен способ магнитопорошкового люминесцентного контроля ж/д колес из описания к патенту на изобретение RU №2103098. Данный способ включает крепление ж/д колеса для обеспечения поворота относительно центра колеса, центрирование колеса по торцевым поверхностям обода и ступицы опорами электромагнитов, подачу магнитной суспензии на поверхность ж/д колеса, его поворот последовательно в одном направлении (по часовой стрелке), затем в противоположном направлении (против часовой стрелки).
При повороте ж/д колеса по часовой стрелке намагничивают такое колесо путем пропускания тока радиального намагничивания, затем, выключив ток радиального намагничивания, при повороте ж/д колеса против часовой стрелки включают ток тангенциального намагничивания. Для выявления дефектов осматривают поверхность контроля непосредственно при повороте ж/д колеса.
Известный способ по патенту на изобретение RU №2103098 имеет некоторые отрицательные особенности.
Разделение намагничивания ж/д колеса на два последовательных этапа приводит к увеличению времени контроля, следовательно, при адаптации такого способа для использования в поточной линии это отрицательно скажется на производительности процесса контроля.
Наиболее близким аналогом к заявляемому изобретению-способу является способ автоматизированного магнитопорошкового люминесцентного контроля железнодорожного (ж/д) колеса, описанный на веб-странице: http://www.ndt.com.Ua/articles/l5_tools.html. Согласно данному способу колесо устанавливают в вертикальном положении, вращают вокруг оси, осуществляют полив магнитной суспензией боковых поверхностей ж/д колеса, находящегося в приложенном магнитном поле одного направления. Способ предусматривает фиксирование на носителе информации образа поверхности контроля, его отображение на средстве отображения для визуализации.
Намагничивание, создающее поле одного направления, ставит под сомнение возможность выявить индикаторный рисунок разнонаправленных дефектов.
В связи с этим обстоятельством фиксирование на носителе информации образа поверхности контроля не дает представления о целостном рисунке дефектов поверхности контроля.
Что касается аналогов к заявляемому изобретению-устройству, то в качестве одного из них компания-производитель Helling GmbH в фирменном каталоге «Неразрушающий контроль» предоставляет сведения о стенде для автоматизированного магнитолюминесцентного контроля железнодорожных (ж/д) колес (www.ntcexpert.ru/imapes/stories/catalog helling.pdf. Страница 34). Стенд включает соединенные вертикальными направляющими стойками верхнюю и нижнюю траверсы с роликами, предназначенными для удержания в вертикальном положении периодически поворачиваемого колеса, средство для полива магнитной суспензией. Намагничивание боковых поверхностей ж/д колеса обеспечивается с помощью соленоида, выполненного в форме рамки, содержащей два продольных элемента, между которыми расположено в вертикальном положении ж/д колесо. Соленоид подвешен к верхней траверсе. Стенд содержит автоматизированное средство индикации дефектов, выполненное в виде пульта управления с сигнализацией о дефектах (повреждениях).
При использовании известного стенда достоверность контроля снижена из-за использования соленоида, создающего однонаправленное магнитное поле, с помощью которого невозможно выявить разнонаправленные дефекты.
Наиболее близким аналогом к изобретению-устройству выбран стенд для автоматизированного магнитолюминесцентного контроля железнодорожных колес, описанный в вышеприведенном электроном каталоге: http://www.ndt.com.Ua/articles/l 5 tools.html. Стенд включает соединенные вертикальными направляющими стойками верхнюю и нижнюю траверсы с роликами, предназначенными для приема и удержания в вертикальном положении периодически поворачиваемого приводного ж/д колеса с помощью указанных роликов, средство для полива магнитной суспензией боковой поверхности колеса. Стенд также включает соленоид, предназначенный для намагничивания боковой поверхности железнодорожного колеса, средство для фиксирования поверхности контроля ж/д колеса (его боковой поверхности), видеокамеру для фиксирования контролируемой поверхности на носителе информации, связанном со средством отображения информации об образе поверхности контроля, по которому судят о качестве контролируемого изделия.
Известное устройство препятствует выявлению разнонаправленных дефектов ввиду того, что соленоид обеспечивает намагничивание контролируемой поверхности в одном направлении.
Задача предлагаемой группы изобретений заключается в устранении вышеуказанных недостатков с достижением технического результата, заключающегося:
- в повышении достоверности автоматизированного магнитолюминесцентного контроля боковой поверхности ж/д колеса, проводимого по участкам, для каждого из которых созданы неизменяемые (идентичные) условия намагниченности с использованием вращающегося магнитного поля в каждой точке контролируемой поверхности и формирования индикаторных рисунков разнонаправленных дефектов;
- в сокращении времени контроля ж/д колеса;
- в повышении степени автоматизации контроля ж/д колеса за счет распознавания индикаторных рисунков средствами машинного зрения.
Одним изобретением группы является способ автоматизированного магнитолюминесцентного контроля железнодорожных (ж/д) колес, согласно которому боковую поверхность вертикально установленного ж/д колеса, разделенную линией горизонтального диаметра на верхнюю и нижнюю части, представляют в качестве поверхности, состоящей из секторов контроля с центральным углом, ведут намагничивание боковой поверхности колеса во вращающемся магнитном поле и полив магнитной суспензией сектора контроля, совмещенного с зоной полива, в качестве которой выбирают среднюю зону нижней части его боковой поверхности, находящуюся в пределах линии горизонтального диаметра и кромки колеса, осуществляют циклы контроля, в каждом из которых поворачивают колесо вокруг его оси для выведения соответствующего сектора контроля из зоны полива и его совмещения с зоной контроля, соответствующей положению сектора контроля, при котором его поверхность фиксируют в кадре и с помощью компьютерной программы записывают на носитель информации в виде образа, имеющего границы сектора, повторяют циклы контроля до фиксирования поверхности каждого сектора контроля в соответствующем кадре, при этом на носителе информации формируют целостный образ поверхности контроля путем последовательного соединения образов секторов контроля в круг и отображают его на экране монитора. Использование способа имеет ряд аспектов, а именно:
- в качестве зоны контроля выбирают среднюю зону верхней части колеса, причем для выведения сектора контроля из зоны полива и совмещения с зоной контроля колесо поворачивают в одном направлении на угол φ, который рассчитывают согласно формуле: φ=π-π/n, если n - это четное число секторов контроля; φ=π-2π/n, если n - это нечетное число секторов контроля с центральным углом α;
- значение центрального угла α задают равным 30°.
Другим изобретением из группы является устройство для автоматизированного магнитолюминесцентного контроля железнодорожных (ж/д) колес, которое включает станину, выполненную с возможностью приема ж/д колеса, каждая боковая поверхность которого разделена на секторы контроля с центральным углом, и содержит направляющие стойки, верхнюю и нижнюю траверсы, привод поворота колеса вокруг своей оси, средство для полива магнитной суспензией, установленные на верхней траверсе две каретки с возможностью перемещения вдоль данной траверсы в качестве направляющих, выполненные в форме, приближающейся к П-образной протяженной рамке - два соленоида, каждый из них жестко соединен с соответствующим трансформатором со стороны незамкнутых концов соленоида с образованием секции, подвешенной к соответствующей каретке за конец с трансформатором посредством шарнирного соединения с корпусом каретки для поворота соответствующей секции в вертикальной плоскости из исходного положения в рабочее положение с помощью пневмоцилиндра, установленного на корпусе соответствующей каретки, при этом в исходном и рабочем положении секций продольные элементы одного соленоида (первого) находятся между продольными элементами другого соленоида (второго), исходное положение секций соответствует расположению соленоидов приблизительно вдоль верхней траверсы, а в рабочем положении, предназначенном для размещения ж/д колеса между продольными сторонами соленоидов, данные соленоиды расположены наклонно относительно верхней траверсы с углом взаимного пересечения продольных приблизительно 90°, причем трансформаторы предназначены для подвода переменного тока к соленоидам со сдвигом фаз на 90°; средство для полива магнитной суспензией установлено так, чтобы обеспечить с двух боковых сторон ж/д колеса полив поверхности каждого сектора контроля при его совмещении с зоной полива, находящейся между линией горизонтального диаметра и кромкой колеса; устройство снабжено двумя средствами для фиксирования, каждое из которых предназначено для фиксирования на соответствующей боковой стороне ж/д колеса каждого сектора контроля в положении, при котором каждый такой сектор совмещен с зоной контроля, носителем информации о зафиксированных образах секторов контроля, блоком управления, представляющим собой программируемый логический контроллер (ПЛК), предназначенный для передачи управляющего воздействия на привод колеса для поворота колеса на угол φ, обеспечивающий выведение каждого сектора контроля из зоны полива до его совмещения с зоной контроля, при этом управляющее воздействие синхронизировано с функциями ПЛК записи на носитель информации образа поверхности каждого сектора контроля и формирования целостного образа поверхности контроля, состоящего из соединенных в круг образов секторов контроля, причем указанный носитель информации связан со средством отображения образов секторов контроля.
Для практической реализации указанной задачи способ предусматривает проводить контроль боковой поверхности ж/д колеса последовательно по участкам, для каждого из которых создают единые неизменяемые условия намагниченности и индикации рисунков дефектов в оптимальном слое магнитной суспензии. Причем намагничивание во вращающемся магнитном поле предопределяет выявление индикаторных рисунков разнонаправленных дефектов на поверхности ж/д колеса.
Участки контроля представляют собой секторы с заранее заданным центральным углом α. Для создания оптимальных неизменяемых условий для выявления рисунка дефектов каждый сектор контроля совмещают с зоной полива. В качестве зоны полива магнитной суспензией выбрана средняя зона нижней части боковой поверхности колеса, а именно: зона, ограниченная сверху линией горизонтального диаметра колеса и простирающаяся до кромки колеса. Ширина зоны полива не имеет принципиального значения, ее выбирают исходя из удобства организации полива поверхности ж/д колеса, тем более, что соответствующий сектор контроля при повороте колеса «проходит» зону полива.
Целесообразность выбора нижней части ж/д колеса в качестве зоны полива обусловлена тем, что при поливе данной зоны для выявления индикаторных рисунков исключен мешающий фактор, такой как стирание рисунка дефектов вследствие стекания суспензии сверху.
Новый признак способа: «поворот колеса в вертикальной плоскости относительно его центра для выведения сектора контроля из зоны полива и его совмещения с зоной контроля» обеспечивает формирование индикаторных рисунков дефектов, пригодных для фиксирования на носителе информации и распознавания (визуализации) зафиксированного образа индикаторного рисунка дефектов средствами машинного зрения.
Образование индикаторного рисунка дефектов, пригодного для распознавания средствами машинного зрения, происходит следующим образом.
Сектор контроля с точки зрения его геометрической формы не может быть точно покрыт магнитной суспензией, поэтому при повороте ж/д колеса из зоны полива выводится обработанный суспензией участок, в который входит сектор контроля.
При повороте колеса до его нового положения, соответствующего положению в зоне контроля, «лишняя» магнитная суспензия стекает с участка поверхности колеса, выводимой из зоны полива, и на его поверхности остается оптимальный смачивающий слой магнитной суспензии, необходимый для выявления индикаторных рисунков дефектов.
После фиксирования в кадре образа сектора контроля, в результате которого на носителе информации фиксируется информационный элемент (соответствующий кадру), для данного сектора цикл контроля завершен.
Для автоматизированного контроля уместно поверхность колеса разделить на секторы контроля (количество одинаковых секторов контроля - n) с центральным углом α. При этом значение циклического угла поворота колеса φ (в одну сторону), задающего выведение сектора контроля из зоны полива для его совмещения с зоной контроля, зависит от местоположения зоны контроля.
Исходя из необходимости стекания магнитной суспензии с поверхности сектора контроля, в качестве зоны контроля удобно выбрать среднюю зону верхней части колеса.
Вполне очевидно, что для автоматизированного контроля важна непрерывность процесса проведения идентичных циклов контроля. С этой точки зрения для зоны контроля и зоны полива, расположенных противолежащими относительно линии горизонтального диаметра, целесообразен расчет угла поворота φ по следующей формуле: φ=φ=π-π/n, если n - это четное число секторов контроля; φ=π-2π/n, если n - это нечетное число секторов контроля. Более подробно применение данной математической формулы рассматривается в примере выполнения способа.
При периодическом повороте колеса при выведении соответствующего сектора контроля из зоны полива с данной зоной совмещается очередной сектор контроля, т.е. одновременно во время контроля соответствующего сектора последующий сектор подвергается обработке магнитной суспензией.
Из вышесказанного следует вывод, что каждый сектор контроля, проходящий зону полива магнитной суспензией и останавливающийся в зоне контроля при повороте колеса на угол φ, находится в единых неизменяемых условиях благодаря одновременно происходящим непрерывным процессам намагниченности и полива магнитной суспензией.
Следует отметить, что поворот колеса, при котором сектор контроля выводится из зоны полива, целесообразен с практической точки зрения в качестве меры, обеспечивающей удобство полива вне зоны контроля.
Как было указано выше, в зоне контроля в кадре фиксируют образ сектора контроля. Очевидно, что непосредственные границы контролируемой поверхности сектора не могут быть буквально зафиксированы в кадре, следовательно, в кадре фиксируется информационный элемент, имеющий прямоугольную форму, в котором интегрирован образ сектора контроля.
На носителе информации неизбежные перекрываемые области смежных информационных элементов интерпретируются в качестве образа одного из секторов контроля, например сектора предыдущего цикла контроля. Иными словами, на носителе информации с использованием программного обеспечения записывается образ сектора контроля, имеющий очертания (границы) сектора.
Таким образом, на носителе информации записывают целостный достоверный образ контролируемой боковой поверхности железнодорожного колеса, содержащий сформированные во вращающемся магнитном поле рисунки возможных дефектов различной направленности. Для вывода о качестве такого колеса информацию о целостном образе всей поверхности контроля отображают, например, на экране монитора.
Результат повышения автоматизации процесса магнитолюминесцентного контроля достигается тем, что на носителе информации при периодическом повороте колеса последовательно формируется достоверный для визуализации и распознавания целостный сформированный образ всей контролируемой поверхности ж/д колеса. Причем образ каждого сектора контроля содержит индикаторные рисунки (возможных) дефектов, выявленных в неизменяемых (идентичных) условиях непрерывных процессов намагниченности и индикации в оптимальном смачивающем слое магнитной суспензии.
Способ осуществляют с помощью соответствующего устройства для автоматического магнитолюминесцентного контроля с помощью намагничивания во вращающемся магнитном поле.
Для обеспечения достоверности контроля используются два соленоида, предназначенные для намагничивания железнодорожного колеса во вращающемся магнитном поле в качестве неподвижного относительно объекта контроля средства намагничивания.
Каждый соленоид для пропускания тока жестко соединен с соответствующим трансформатором с образованием секции. Каждая секция подвешена за один конец со стороны трансформатора к соответствующей каретке, установленной на верхней траверсе в качестве направляющих. При этом, находясь в любом положении относительно верхней траверсы, продольные элементы одного соленоида (первого) расположены между продольными элементами другого соленоида (второго). Такое взаимное расположение возможно в том случае, когда соленоиды (секции) наклонены навстречу друг другу. Но для работы устройства важны два положения соленоидов: исходное и рабочее положения, при этом в исходном положении соленоиды располагаются вдоль верхней траверсы, а в рабочем положении соленоиды наклонены относительно верхней траверсы и взаимно наклонены под углом 90° (угол взаимного наклона продольных элементов соленоидов).
Устройство адаптировано для контроля ж/д колес различного типоразмера благодаря тому, что каретки установлены на верхней траверсе, как в направляющих. Так, при взаимном приближении/отдалении кареток обеспечивается удобство настройки соленоидов на определенный типоразмер колес.
В рабочем положении соленоидов колесо размещено непосредственно между продольными элементами первого соленоида, соответственно и между продольными элементами второго соленоида. Таким образом, две боковые поверхности колеса намагничиваются во вращающемся магнитном поле, когда переменный ток от трансформаторов со сдвигом фаз на 90° пропускается по обмоткам соленоидов.
Известно, что вращающееся магнитное поле характеризуется тем, что вектор магнитной индукции постоянно вращается в каждой точке поверхности контроля; данное явление приводит к обнаружению разнонаправленных дефектов.
Известны также средства, предназначенные для создания вращающегося магнитного поля. Например, в каталоге Helling GmbH - компании-производителя средств неразрушающего контроля - описан крестовый магнит KMU-8/42, создающий вращающееся магнитное поле и применяемый для выявления разнонаправленных дефектов сварных швов большой протяженности (опубликовано на веб-странице www.ntcexpert.ru/images/stories/catalog_helling.pdf, стр.27). Крестовый магнит создает вращающееся магнитное поле на небольших участках поверхности контроля.
В заявляемом устройстве два соленоида проявляют не только вышеуказанный технический результат, но и способствуют достижению дополнительного свойства (результата). Такой дополнительный результат заключается в удобстве контроля ж/д колеса благодаря тому, что соленоиды намагничивают обе боковые поверхности железнодорожного колеса во вращающемся магнитном поле, исключающем перенос (переустановку) данных средств не только по одной поверхности контроля, но и перенос на другую поверхность.
Для фиксирования образов контролируемой поверхности с одной боковой стороны ж/д колеса на верхней траверсе контрольного стенда в качестве средства фиксирования установлена минимум одна видеокамера.
Для управления процессом периодического поворота колеса для выведения каждого сектора контроля из зоны полива и его совмещением с зоной контроля устройство снабжено программируемым логическим контроллером (ПЛК). В соответствии с заложенной программой ПЛК способен передавать управляющий сигнал к приводу поворота колеса, обеспечивающего его периодический поворот, синхронизированный с процессом записи на носитель информации образа поверхности контролируемого сектора. При этом для визуализации и распознавания полученных образов носитель информации связан с устройством отображения, например с экраном монитора с достаточным разрешением, позволяющим распознавать индикаторные рисунки разнонаправленных дефектов.
Таким образом, средства автоматического управления позволяют оптимизировать процесс контроля железнодорожных колес по участкам (секторам контроля), обеспечивая непрерывность циклов контроля, в результате которых происходит формирование целостного образа контролируемой поверхности, пригодного для распознавания средствами машинного зрения.
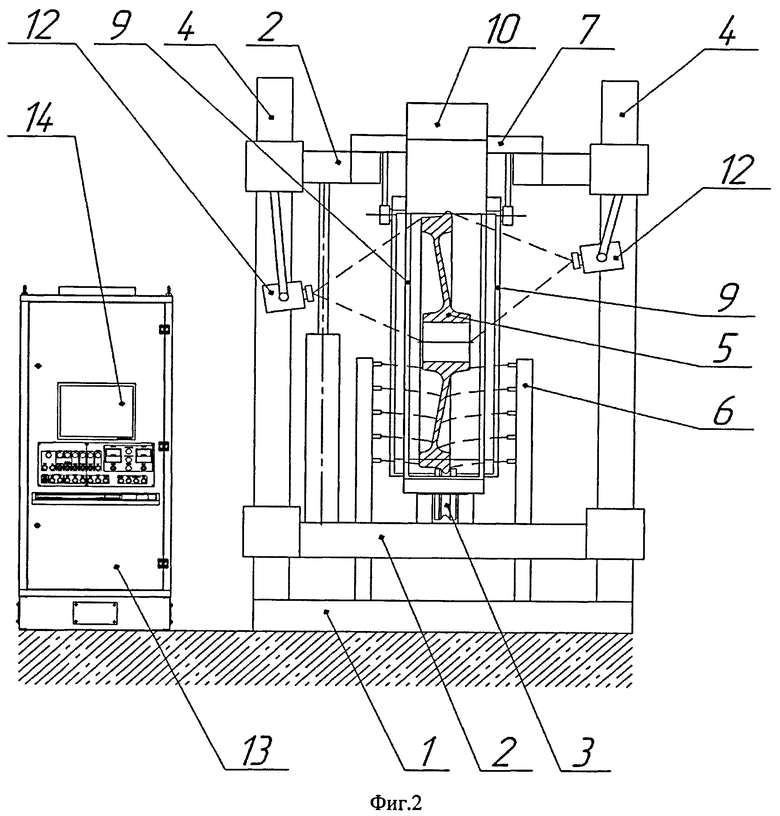
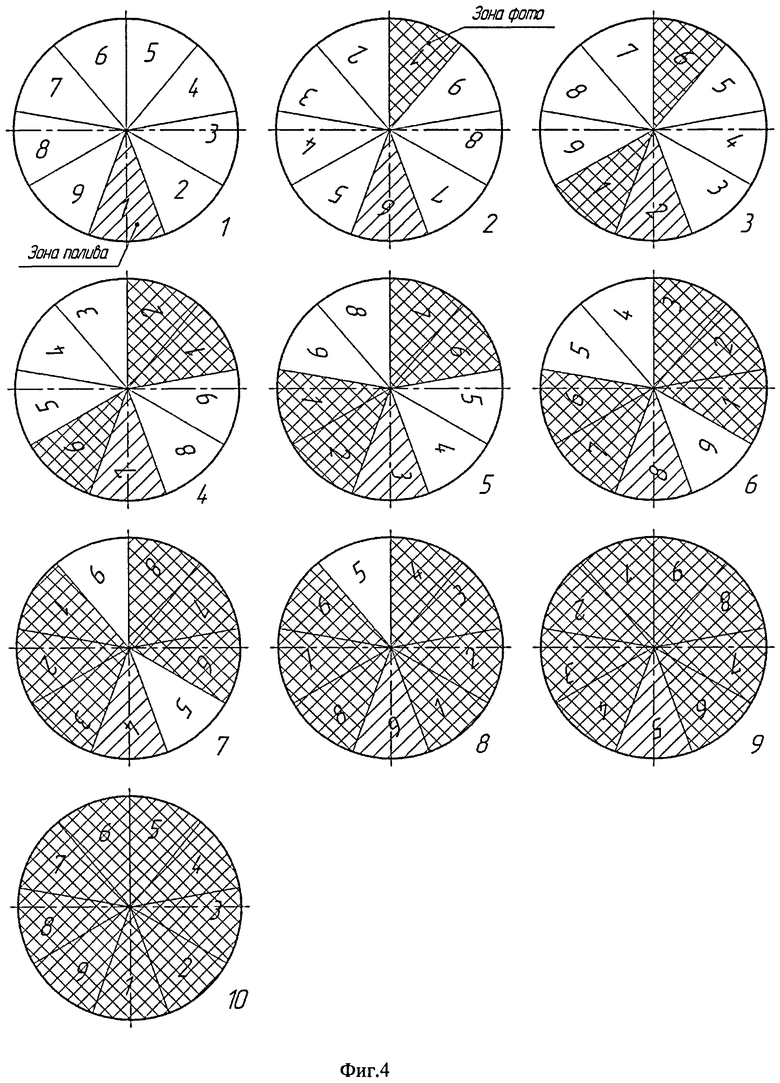
На фигуре 1 приведен общий вид устройства для автоматического магнитолюминесцентного контроля железнодорожных колес; на фигуре 2 - поперечный разрез устройства; на фигуре 3 - схема секторов контроля контролируемого ж/д колеса, проходящих зону полива и зону контроля при их четном количестве; на фигуре 4 - схема секторов контроля контролируемого ж/д колеса, проходящих зону полива и зону контроля при их нечетном количестве.
Устройство содержит стенд для магнитолюминесцентного контроля. Стенд содержит: станину 1, верхнюю и нижнюю траверсы 2 с тремя роликами 3; траверсы 2 соединены стойками 4.
Нижний ролик 3 выполнен приводным; нижняя траверса 2 выполнена с возможностью перемещения вдоль стоек 4 до фиксированного положения, при котором ролики 3 удерживают железнодорожное колесо 5.
На станине 1 стенда установлены два средства 6 с многосопловыми форсунками для выпуска магнитной суспензии, установленные так, чтобы каждое такое средство 6 обеспечивало полив магнитной суспензией ж/д колеса 5 с двух боковых сторон. На фигурах 1, 2 не показаны элементы системы полива, они могут быть выполнены стандартными, обычно применяемыми в данной области техники.
На верхней траверсе 2 установлены две каретки 7 с возможностью перемещения вдоль данной траверсы в качестве направляющих.
Соленоиды 8, предназначенные для намагничивания во вращающемся магнитном поле, выполнены в виде незамкнутой рамы П-образной формы с продольными элементами 9. Пропускание тока по обмоткам каждого соленоида 8 осуществляется с помощью соответствующего трансформатора 10, жестко соединенного с соленоидом 8 со стороны его незамкнутых концов. Каждый соленоид 8 и соответствующий трансформатор образуют секцию (на фигурах 1, 2 позициями 8 и 10 указаны составные элементы секции).
К соответствующим кареткам 7 с помощью шарнирного крепления за один конец со стороны трансформатора 10 подвешены упомянутые секции.
Соленоиды 8, находясь в составе соответствующей секции, прикреплены к кареткам 7 в положении, при котором указанные соленоиды обращены друг к другу, при этом продольные элементы 9 одного (первого) соленоида) 8 свободно проходят между продольными элементами 9 другого (второго) соленоида 8.
В исходном и рабочем положениях соленоиды 8 удерживаются пневмоцилиндрами 11, при этом в исходном положении соленоиды 8 расположены приблизительно вдоль верхней траверсы 2, а в рабочем положении - наклонно относительно верхней траверсы 2 с взаимным углом пересечения приблизительно 90°.
Такое решение связано с удобством осуществления процесса контроля и обслуживания оборудования стенда. Объясняется это тем, что в исходном положении секций обеспечен доступ на место установки контролируемого ж/д колеса, а в рабочем положении соленоидов (секций) - становится возможным беспрепятственно осуществлять полив зоны, находящей между продольными сторонами соленоидов, а также фиксировать поверхность колеса в свободной зоне, выбранной в качестве зоны контроля.
Для фиксирования информации об образах контролируемой соответствующей боковой поверхности ж/д колеса на верхней траверсе 2 установлены видеокамеры 12 (каждая видеокамера 12 для фиксирования поверхности ж/д колеса с одной стороны).
Автоматизация процесса контроля обеспечивается с помощью введенного в устройство блока управления 13 (на фигуре 1 изображен шкаф 13 управления), связанного с носителем информации (содержится в шкафу управления), который предназначен для записи образов контролируемой поверхности, полученных с помощью видеокамер 12. Таким образом, видеокамеры 12 связаны с носителем информации.
Видеокамеры 12 связаны также с монитором 14, предназначенным для отображения информации об образах контролируемой поверхности ж/д колеса.
Для осуществления магнитолюминесцентного контроля железнодорожное колесо 5 помещают на стенд. Для этого нижнюю траверсу 2 отводят в нижнее положение, устанавливают ж/д колесо 5 в удерживающих роликах 3, перемещая нижнюю траверсу 2 до необходимого положения.
Первый и второй соленоиды 8 устанавливают наклонно приблизительно под углом 90°, располагая ж/д колесо 5 непосредственно между продольными элементами 9 первого соленоида 8. Место пересечения продольных элементов 9 соленоидов 8 располагается напротив воображаемой линии вертикального радиуса нижней части ж/д колеса 5.
В таком положении устройство готово к работе для реализации заявляемого способа автоматического магнитолюминесцентного контроля железнодорожных колес.
Перенастройка стенда для контроля ж/д колес различного типоразмера обеспечивается тем, что каретки 7 способны перемещаться вдоль верхней траверсы 2 для установки места пересечения соленоидов 8 напротив линии вертикального диаметра колеса (или зоны полива).
Возможность осуществления контроля ж/д колеса одновременно с двух сторон, которые соответствуют двум боковым поверхностям, свидетельствует об оптимизации процесса контроля с возможностью получения достоверного результата о качестве железнодорожного колеса.
Контроль осуществляют при одновременно происходящих непрерывных процессах полива магнитной суспензией зоны полива поверхности ж/д колеса с использованием многосопловых форсунок 6 и намагничивания во вращающемся магнитном поле путем пропускания переменного тока по обмоткам соленоидов 8 со сдвигом фаз на 90°.
Для полива магнитной суспензией выбирают среднюю зону нижней части боковой поверхности ж/д колеса 5, находящуюся в пределах воображаемой линии горизонтального диаметра и кромки колеса. Выбор такой зоны обусловлен необходимостью полива каждого сектора контроля, когда последний совмещен с зоной полива при периодическом повороте колеса на угол φ.
При установке видеокамер 12 на верхней траверсе 2 удобно зону контроля выбрать в средней части поверхности ж/д колеса 5, расположенной выше воображаемой линии горизонтального диаметра колеса.
Поверхность ж/д колеса представляют разделенной на участки контроля, в качестве которых выбирают секторы с центральным углом α, например, равным 30°, что соответствует 12 секторам контроля (n=12) (см. фигуру 3).
Для выведения сектора контроля из зоны полива для его совмещения с зоной контроля угол поворота φ целесообразно рассчитывать по формуле: φ=π-π/n, при n=12 угол φ=165°. Иными словами, выбранное расположение зоны полива и зоны контроля диктует поворот колеса на угол, отличающийся от 180° на угол α/2, т.е. на 15°. Такой расчет значения угла φ продиктован необходимостью ритмичного поворота колеса на одинаковый угол для прохождения зоны полива (и неизбежно зоны контроля) каждым сектором всего один раз. В противном случае, например, выбрав угол поворота φ=180°, некоторые секторы контроля могли быть повторно совмещены с зоной полива и, кроме того, возникла необходимость дополнительного поворота колеса для полива и контроля «щели» между идентичными секторами контроля. Указанные отрицательные особенности можно избежать с использованием формулы расчета угла φ.
Таким образом, перед первым циклом контроля в исходном положении ж/д колеса соответствующий сектор контроля (первый сектор контроля) совмещен с зоной полива - данный сектор подвергается обработке магнитной суспензией.
Для получения информации о состоянии контролируемой поверхности первого сектора его выводят из зоны полива путем поворота колеса на угол φ=165° с помощью приводного ролика 3, тем самым совмещают с зоной контроля.
При нечетном количестве секторов, например при заданном значении угла α=24°, количество секторов равно 15 (n=15). Угол поворота рассчитывается по формуле: φ=π-2π/n, таким образом, φ=156°. Это означает, что при нечетном количестве секторов контроля угол φ отличается от угла 180° на 24° (см. фигуру 4).
В процессе поворота колеса на угол φ с поверхности колеса, включающей поверхность первого воображаемого сектора контроля, стекает лишний слой суспензии и при совмещении данного сектора с зоной контроля на соответствующей поверхности ж/д колеса остается смачивающий слой магнитной суспензии, благоприятный для выявления индикаторных рисунков возможных дефектов.
Время поворота ж/д колеса обусловлено задаваемой угловой скоростью, значение которой выбирают исходя из возможности получить смачиваемую поверхность сектора контроля, выводимого из зоны полива для совмещения с зоной контроля. При выбранном значении угла поворота φ колеса время поворота составляет 2-4 секунды.
При совмещении первого сектора с зоной контроля видеокамера 12 фиксирует в кадре образ сектора контроля. Причем в кадре фиксируется информационный элемент (в границах рамки кадра), включающий непосредственно образ первого сектора контроля. Таким образом, первый цикл контроля для первого сектора контроля завершен.
Во время фиксирования первого сектора контроля (в первом цикле) в зону полива введен следующий сектор контроля (второй сектор). Второй цикл завершается при совмещении второго сектора с зоной контроля и фиксированием в кадре образа второго сектора контроля.
Блок управления 13 в соответствии с программным обеспечением, учитывающим значения угла поворота φ и центрального угла α, передает управляющее воздействие на привод поворота ж/д колеса 5 для осуществления циклов контроля.
Так, для каждого сектора контроля, прошедшего свой цикл, на носителе информации записывается образ поверхности сектора контроля, имеющего границы сектора. Иными словами, области перекрытия смежных информационных элементов, полученных в том или ином кадре, на носителе информации интерпретируется в виде образа одного сектора контроля.
Для формирования целостного образа контролируемой боковой поверхности железнодорожного колеса на носителе информации зафиксированные образы каждого сектора контроля соединяются в круг. Для распознавания индикаторного рисунка дефектов целостный образ поверхности контроля отображают на экране монитора и делают вывод о качестве контролируемого колеса.
Приведенный пример осуществления способа с помощью устройства раскрывает возможность достижения следующих технических результатов.
- Сокращение времени контроля ж/д колеса за счет контроля его поверхности одновременно с двух сторон, а также за счет проведения контроля в процессе намагниченности во вращающемся магнитном поле, создающем условия для выявления разнонаправленных дефектов, исключающих этапы намагничивания поверхности колеса в различных направлениях. Данное обстоятельство придает дополнительное преимущество заявляемому изобретению - возможности его использования в составе поточной линии, предусматривающей фактор производительности процесса контроля.
- Повышение степени достоверности результатов контроля ж/д колеса за счет получения целостного образа контролируемой поверхности, в котором интегрированы образы секторов контроля (как составных частей контролируемой поверхности ж/д колеса), полученные благодаря идентичным для каждого сектора условиям формирования индикаторных рисунков дефектов различной направленности.
- Повышение степени автоматизации за счет синхронизации процесса периодического поворота колеса и возможности визуализации образа каждого сектора контроля (согласно циклам контроля) и образа всей поверхности колеса средствами машинного зрения.
Применение способа и устройства автоматизированного магнитолюминесцентного контроля не ограничивается приведенным примером, но охватывает варианты, которые могут быть рассмотрены в рамках приведенной формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для магнитопорошковой дефектоскопии колец подшипников | 2024 |
|
RU2828161C1 |
| СПОСОБ МАГНИТОПОРОШКОВОГО КОНТРОЛЯ ПРУЖИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2784214C1 |
| УСТРОЙСТВО МАГНИТОПОРОШКОВОГО КОНТРОЛЯ СИЛОВЫХ ПРУЖИН | 2023 |
|
RU2836597C1 |
| Магнитный дефектоскоп | 1984 |
|
SU1244575A1 |
| СТЕНД МАГНИТОПОРОШКОВОГО КОНТРОЛЯ БАНДАЖА КОЛЕС ЛОКОМОТИВА | 2022 |
|
RU2787905C1 |
| УСТРОЙСТВО МАГНИТОПОРОШКОВОГО КОНТРОЛЯ БАНДАЖА КОЛЕС ЛОКОМОТИВА | 2022 |
|
RU2800746C1 |
| СПОСОБ НАНЕСЕНИЯ СУСПЕНЗИИ В МАГНИТОПОРОШКОВОМ КОНТРОЛЕ | 1991 |
|
RU2024014C1 |
| Магнитолюминесцентная суспензия для дефектоскопии изделий | 1990 |
|
SU1739275A1 |
| Устройство электромагнитно-акустического контроля рельсов | 2017 |
|
RU2653663C1 |
| Электромагнитно-акустический преобразователь для ультразвукового контроля | 2016 |
|
RU2649636C1 |

Изобретение относится к неразрушающему контролю железнодорожных (ж/д) колес методом магнитопорошковой дефектоскопии. Согласно способу ведут намагничивание боковой поверхности ж/д колеса во вращающемся магнитном поле и полив магнитной суспензией сектора контроля, совмещенного с зоной полива. В процессе намагничивания и полива осуществляют циклы контроля, в каждом из которых поворачивают колесо вокруг его оси для выведения соответствующего сектора контроля из зоны полива и его совмещения с зоной контроля, соответствующей положению сектора контроля. В таком положении поверхность сектора контроля фиксируют в кадре и с помощью компьютерной программы записывают на носитель информации в виде образа, имеющего границы сектора, повторяют циклы контроля до фиксирования поверхности каждого сектора контроля в соответствующем кадре. Намагничивание во вращающемся магнитном поле обеспечивается с помощью соответствующего устройства, содержащего станину с верхней и нижней траверсами. На верхней траверсе установлены два соленоида, каждый из которых выполнен в виде рамки П-образной формы. Технический результат - сокращение времени контроля и повышение степени достоверности результатов контроля ж/д колеса. 2 н. и 2 з.п. ф-лы, 4 ил.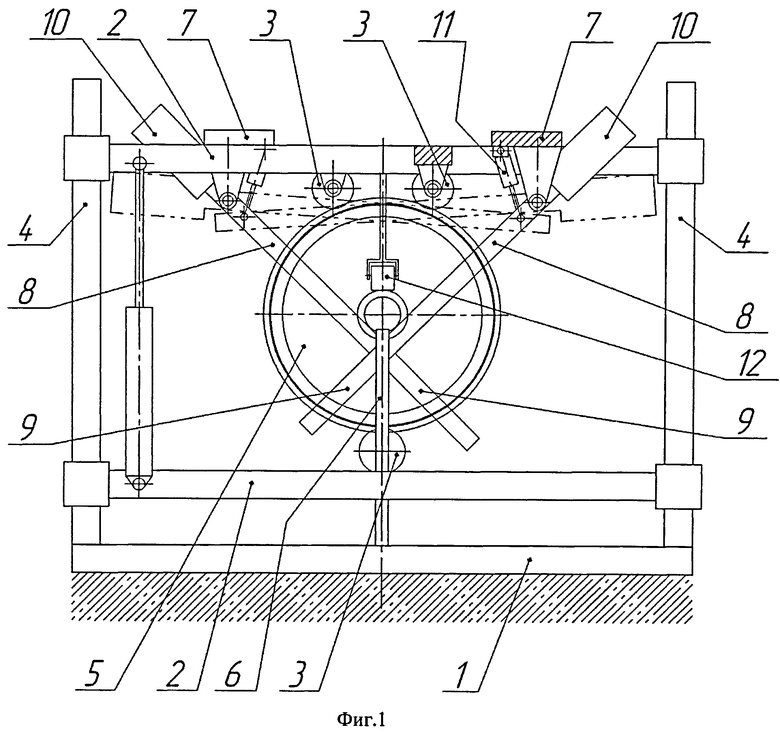
1. Способ автоматизированного магнитолюминесцентного контроля железнодорожных (ж/д) колес, согласно которому боковую поверхность вертикально установленного ж/д колеса, разделенную линией горизонтального диаметра на верхнюю и нижнюю части, представляют в качестве поверхности, состоящей из секторов контроля с центральным углом, ведут намагничивание боковой поверхности колеса во вращающемся магнитном поле и полив магнитной суспензией сектора контроля, совмещенного с зоной полива, в качестве которой выбирают среднюю зону нижней части его боковой поверхности, находящуюся в пределах линии горизонтального диаметра и кромки колеса, осуществляют циклы контроля, в каждом из которых поворачивают колесо вокруг его оси для выведения соответствующего сектора контроля из зоны полива и его совмещения с зоной контроля, соответствующей положению сектора контроля, при котором его поверхность фиксируют в кадре и с помощью компьютерной программы записывают на носитель информации в виде образа, имеющего границы сектора, повторяют циклы контроля до фиксирования поверхности каждого сектора контроля в соответствующем кадре, при этом на носителе информации формируют целостный образ поверхности контроля путем последовательного соединения образов секторов контроля в круг и отображают его на экране монитора.
2. Способ по п.1, отличающийся тем, что в качестве зоны контроля выбирают среднюю зону верхней части колеса, причем для выведения сектора контроля из зоны полива и совмещения с зоной контроля колесо поворачивают в одном направлении на угол φ, который рассчитывают согласно формуле: φ=π-π/n, если n - это четное число секторов контроля; φ=π-2π/n, если n - это нечетное число секторов контроля с центральным углом α.
3. Способ по п.2, отличающийся тем, что значение центрального угла α задают равным 30°.
4. Устройство для автоматизированного магнитолюминесцентного контроля железнодорожных (ж/д) колес, включающее станину, выполненную с возможностью приема ж/д колеса, каждая боковая поверхность которого разделена на секторы контроля с центральным углом и содержит направляющие стойки, верхнюю и нижнюю траверсы, привод поворота колеса вокруг своей оси, средство для полива магнитной суспензией, установленные на верхней траверсе две каретки с возможностью перемещения вдоль данной траверсы в качестве направляющих, выполненные в форме, приближающейся к П-образной протяженной рамке - два соленоида, каждый из них жестко соединен с соответствующим трансформатором со стороны незамкнутых концов соленоида с образованием секции, подвешенной к соответствующей каретке за конец с трансформатором посредством шарнирного соединения с корпусом каретки для поворота соответствующей секции в вертикальной плоскости из исходного положения в рабочее положение с помощью пневмоцилиндра, установленного на корпусе соответствующей каретки, при этом в исходном и рабочем положении секций продольные элементы одного соленоида (первого) находятся между продольными элементами другого соленоида (второго), исходное положение секций соответствует расположению соленоидов приблизительно вдоль верхней траверсы, а в рабочем положении, предназначенном для размещения ж/д колеса между продольными сторонами соленоидов, данные соленоиды расположены наклонно относительно верхней траверсы с углом взаимного пересечения продольных приблизительно 90°, причем трансформаторы предназначены для подвода переменного тока к соленоидам со сдвигом фаз на 90°; средство для полива магнитной суспензией установлено так, чтобы обеспечить с двух боковых сторон ж/д колеса полив поверхности каждого сектора контроля при его совмещении с зоной полива, находящейся между линией горизонтального диаметра и кромкой колеса; устройство снабжено двумя средствами для фиксирования, каждое из которых предназначено для фиксирования на соответствующей боковой стороне ж/д колеса каждого сектора контроля в положении, при котором каждый такой сектор совмещен с зоной контроля, носителем информации о зафиксированных образах секторов контроля, блоком управления, представляющим собой программируемый логический контроллер (ПЛК), предназначенный для передачи управляющего воздействия на привод колеса для поворота колеса на угол φ, обеспечивающий выведение каждого сектора контроля из зоны полива до его совмещения с зоной контроля, при этом управляющее воздействие синхронизировано с функциями ПЛК записи на носитель информации образа поверхности каждого сектора контроля и формирования целостного образа поверхности контроля, состоящего из соединенных в круг образов секторов контроля, причем указанный носитель информации связан со средством отображения образов секторов контроля.
| СПОСОБ ИЗГОТОВЛЕНИЯ ШТАМПОКАТАНЫХ КОЛЕС | 1996 |
|
RU2103098C1 |
| СПОСОБ МАГНИТОПОРОШКОВОГО КОНТРОЛЯ | 1992 |
|
RU2020466C1 |
| Тормозная установка для стендовых испытаний двигателей при неустановившемся режиме | 1948 |
|
SU80704A1 |
| Осадительная центрифуга | 1983 |
|
SU1197739A1 |

