Группа изобретений относится к авиационной технике, а именно к средствам управления, и может быть использована в беспилотных авиационных системах.
При создании беспилотных авиационных систем возникает необходимость существенного повышения безопасности полета. По данным ВВС США уровень аварийности, обратно пропорциональный налету (количество часов) на авиационное происшествие, у беспилотных летательных аппаратов (здесь и далее в материалах - БПЛА) существенно выше, чем у пилотируемых летательных аппаратов. В основном инциденты были вызваны низкой надежностью систем управления БПЛА, ошибками операторов и сбоями связи.
Известны способ управления полетом БПЛА и беспилотная авиационная система (RU 2523613 С2, опубл. 20.07.2014), выбранные в качестве прототипа. Способ характеризуется тем, что измеряют параметры положения и движения БПЛА, осуществляют автоматическое управление полетом БПЛА по заранее запрограммированной траектории путем формирования управляющей системой управляющих сигналов траекторного автоматического управления полетом и формирования по ним системой управления сигналов управления рулевыми приводами аэродинамических органов управления и силовой установкой. Беспилотная авиационная система содержит соединенные посредством радиоканала пункт управления и БПЛА, который содержит соединенные между собой систему управления, управляющую систему со средствами для запоминания полетных данных и бортовые навигационные датчики.
Недостатки прототипа заключаются в отсутствии контроля, отсутствии резервирования контура управления полетом и несвоевременном информировании оператора об его отказе.
Задачей настоящего изобретения является устранение недостатков прототипа и разработка решения, позволяющего повысить безопасность полета БПЛА.
Технический результат заключается в повышении безопасности полета БПЛА за счет резервирования функций управляющей системы в части формирования траектории возврата.
Указанный результат достигается тем, что в способе управления полетом БПЛА, включающем измерение параметров положения и движения БПЛА, формирование управляющей системой по заранее запрограммированной траектории управляющих сигналов автоматического траекторного управления полетом и формировании по ним системой управления сигналов управления рулевыми приводами аэродинамических органов управления и силовой установкой, посредством системы управления запоминают параметры по меньшей мере одного аэродрома посадки, контролируют исправность управляющей системы, а при ее отказе выполняют возврат на аэродром посадки и формируют сигнализацию для выдачи оператору на пункт управления.
В одном из вариантов осуществления изобретения выполняют возврат на ближайший аэродром посадки.
В другом варианте при отказе управляющей системы посредством системы управления перед возвратом осуществляют приведение БПЛА к горизонту и стабилизацию текущих траекторных параметров полета.
Описанный способ управления полетом осуществляется в беспилотной авиационной системе, содержащей соединенные посредством радиоканала пункт управления и БПЛА, который содержит соединенные между собой систему управления, управляющую систему со средствами для запоминания полетных данных и бортовые навигационные датчики. При этом система управления содержит средства для запоминания параметров по меньшей мере одного аэродрома посадки и выполнена с возможностью контроля исправности управляющей системы, а в случае ее отказа - выполнения возврата на аэродром посадки и формирования сигнализации для выдачи оператору на пункт управления.
Пункт управления может содержать средства связи и пост управления со средствами управления, индикации и сигнализации.
Система управления может быть осуществлена с возможностью выполнения возврата на ближайший аэродром посадки.
Также система управления может быть выполнена с возможностью при отказе управляющей системы осуществлять приведение БПЛА к горизонту и стабилизацию текущих траекторных параметров полета перед возвратом.
Система управления, способная запоминать параметры по меньшей мере одного аэродрома посадки, контролировать исправность управляющей системы, а в случае ее отказа выполнять возврат на один из запомненных аэродромов и формировать сигнализацию для выдачи оператору на пункт управления, позволяет повысить безопасность полета БПЛА.
Предлагаемое решение поясняется с помощью фиг. 1-3.
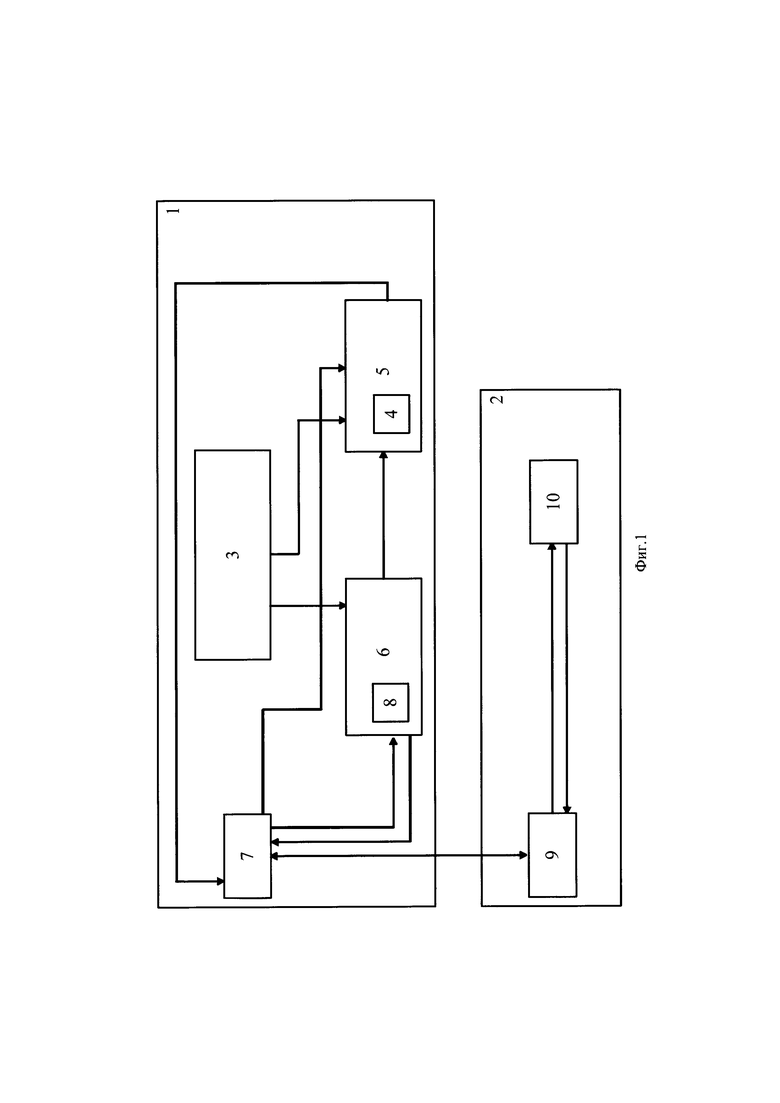
На фиг. 1 представлена блок-схема беспилотной авиационной системы.
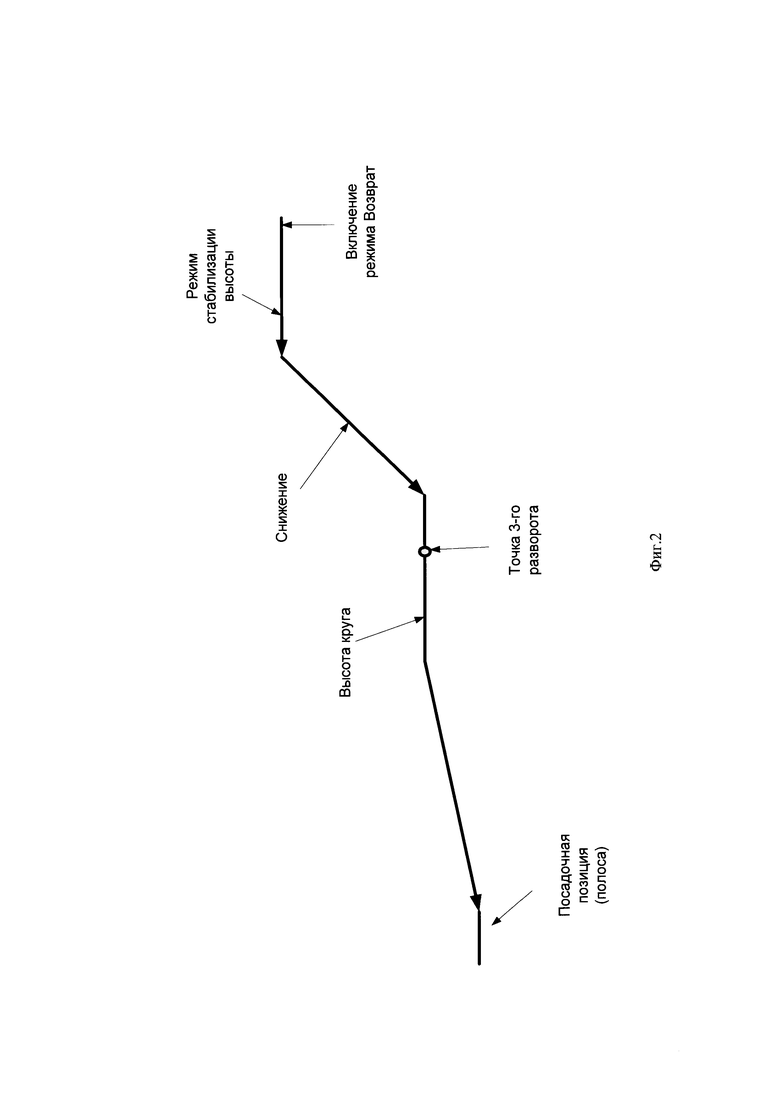
На фиг. 2 представлена траектория полета в вертикальной плоскости.
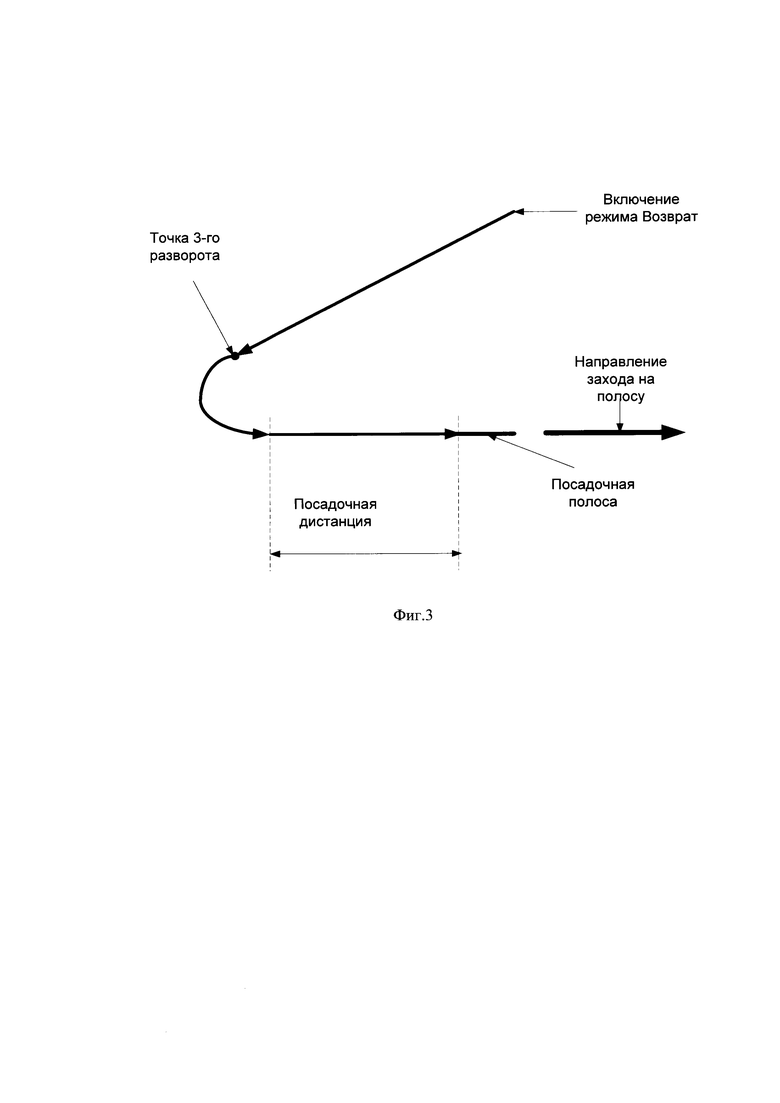
На фиг. 3 представлена траектория полета в горизонтальной плоскости.
Способ управления полетом БПЛА включает измерение параметров положения и движения БПЛА, автоматическое управление полетом БПЛА по заранее запрограммированной траектории путем формирования управляющей системой управляющих сигналов автоматического траекторного управления полетом и формирования по упомянутым управляющим сигналам системой управления сигналов управления рулевыми приводами аэродинамических органов управления и силовой установкой. При этом посредством системы управления запоминают параметры по меньшей мере одного аэродрома посадки, контролируют исправность управляющей системы и при ее отказе осуществляют приведение БПЛА к горизонту, стабилизацию текущих траекторных параметров полета, формируют траекторию и выполняют возврат на аэродром посадки, а также формируют сигнализацию для выдачи оператору на пункт управления.
Понятие «возврата» в рамках данной заявки подразумевает выполнение полета с выходом в зону действия инструментальных посадочных средств (на высоту круга и на направление захода на заданной дальности от порога взлетно-посадочной полосы (ВПП)), который осуществляется по управляющим сигналам системы управления. Такой режим работы можно также называть «резервным возвратом», причем основной возврат, в отличие от резервного, реализуется по управляющим сигналам управляющей системы.
Беспилотная авиационная система (фиг. 1) содержит БПЛА 1 и пункт управления 2, связанные посредством радиоканала.
БПЛА 1 имеет бортовые навигационные датчики 3, систему управления 5, управляющую систему 6, бортовые средства связи 7 и другие свойственные беспилотным аппаратам элементы и системы.
Управляющая система 6 содержит вычислитель (на схеме не показан) и средства 8 для запоминания полетных данных. Система 6 соединена с навигационными датчиками 3, оборудованием БПЛА (на схеме не показано), с бортовыми средствами связи 7 и вооружением (на схеме не показано) и предназначена для управления полетом, оборудованием, вооружением, а также для передачи оператору посредством радиоканала информации о параметрах положения, движения, технического состояния БПЛА 1 и его систем. Задача автоматического управления полетом в управляющей системе 6 решается путем формирования по данным, содержащимся в средствах 8, управляющих сигналов автоматического траекторного управления (заданные курс, высота, скорость), которые поступают в систему управления 5.
Система управления 5 содержит вычислитель (на схеме не показан) и средства 4 для запоминания параметров по меньшей мере одного аэродрома посадки и предназначена для обеспечения характеристик устойчивости и управляемости, ручного дистанционного и автоматического управления полетом и движением по земле (разбег по ВПП при взлете, пробег по ВПП при посадке). Задача автоматического управления полетом в системе управления 5 решается путем формирования сигналов управления рулевыми приводами аэродинамических органов управления (на схеме не показано) и сигналов управления тягой силовой установки (на схеме не показано) с использованием управляющих сигналов траекторного автоматического управления с системы 6 и навигационных параметров с бортовых навигационных датчиков 3. Задача автоматического управления движением по земле решается путем формирования сигналов управления поворотом колес передней опоры и торможением колес.
Согласно настоящему изобретению, система управления 5 выполнена с возможностью осуществлять контроль исправности управляющей системы 6, а в случае ее отказа - осуществлять приведение БПЛА 1 к горизонту и стабилизацию текущих траекторных параметров полета, а также формировать траекторию и выполнять возврат на аэродром посадки из текущего местоположения БПЛА 1. Попутно система 5 формирует сигнализацию для выдачи оператору на пункт управления 2 о переходе в режим «резервный возврат».
Пункт управления 2 содержит средства связи 9 и пост управления 10 со средствами управления, индикации и сигнализации.
Бортовые средства связи 7 и средства связи 9 служат для связи БПЛА 1 с пунктом управления 2 посредством радиоканала, при этом пункт управления 2 может быть расположен как стационарно на земле, так и на подвижном объекте.
Первый и второй выходы датчиков 3 соединены с первыми входами управляющей системы 6 и системы управления 5 соответственно. Первый и второй выходы средств связи 7 соединены со вторыми входами управляющей системы 6 и системы управления 5 соответственно. Первый и второй входы средств связи 7 соединены с первым выходом управляющей системы 6 и первым выходом системы управления 5 соответственно. Второй выход управляющей системы 6 соединен с третьим входом системы управления 5.
Первый выход поста управления 10 соединен со входом средств связи 9. Выход средств связи 9 соединен с первым входом поста управления 10.
Предлагаемое решение работает следующим образом.
В посте управления 10 со средствами управления, индикации и сигнализации, содержащем рабочее место оператора, осуществляют планирование траектории полета БПЛА 1.
При программировании траектории вводят параметры аэродрома взлета, координаты, высоты промежуточных пунктов маршрута (ППМ), конечного пункта маршрута (КПМ), способ управления - маршрутный, путевой, комбинированный - исходя из полетного задания, например, мониторинга определенных объектов. Указанная информация в виде массива полетных данных (МПД1) передается посредством радиоканала, а именно через средства связи 9,7 на средства 8 для запоминания полетных данных управляющей системы 6 в процессе предполетной подготовки.
Также вводят параметры по меньшей мере одного аэродрома посадки, а именно его координаты, направления захода, заданная дальность до порога ВПП и давление атмосферы по меньшей мере одного аэродрома посадки БПЛА. Эти данные в виде массива полетных данных (МПД2) поступают через средства связи 9,7 на средства 4 для запоминания параметров по меньшей мере одного аэродрома посадки системы управления 5 и на средства 8 для запоминания полетных данных управляющей системы 6.
С использованием указанных данных (МПД1,2) в управляющей системе 6 осуществляется формирование и запоминание траектории полета, заданной при предполетной подготовке.
В процессе полета при необходимости могут осуществлять дистанционное управление. Пост управления 10 выполнен с возможностью формирования сигналов дистанционного управления в виде заданных значений: угла курса, высоты полета, приборной скорости, которые поступают через радиоканал (средства связи 9,7) в систему управления 5. Также пост управления 10 выполнен с возможностью формирования сигналов ручного дистанционного управления в виде положений органов ручного управления летательного аппарата.
Измерение параметров положения и движения БПЛА осуществляют посредством бортовых навигационных датчиков 3, содержащих систему воздушных сигналов (СВС), измеряющую температуру воздушного потока, статическое и полное давление, и бесплатформенную инерциально-спутниковую систему (БИНС), измеряющую текущие координаты местоположения, высоту, скорости БПЛА, параметры углового положения, угловых скоростей и ускорений.
С выходов бортовых датчиков 3 на входы управляющей системы 6 и системы управления 5 поступают данные о:
- статическом давлении;
- полном давлении;
- температуре воздушного потока;
- текущих координатах местоположения БПЛА,
- параметрах углового положения, скорости, высоты.
При этом со второго выхода бортовых датчиков 3 на первый вход системы управления 5 поступают параметры углового положения, угловых скоростей и ускорений.
В управляющей системе 6 с учетом заранее запрограммированной траектории полета и измеренных параметров текущего положения и движения БПЛА 1 формируются управляющие сигналы автоматического траекторного управления полетом в виде заданных значений высоты, скорости, угла курса БПЛА, которые поступают в систему управления 5.
В системе управления 5 штатно реализуется автономный режим отработки управляющих сигналов системы 6 с учетом режима полета. Система управления 5 контролирует исправность управляющей системы 6 путем анализа признаков достоверности управляющих сигналов траекторного автоматического управления, поступающих из системы 6. При этом отсутствие достоверности хотя бы одного из управляющих сигналов более установленного интервала времени говорит об отказе системы 6. После чего система управления 5 по преимущественному варианту осуществления формирует команду и осуществляет приведение к горизонту и стабилизацию текущих траекторных параметров полета. Далее в системе управления 5 активируется режим «резервный возврат», при этом формируется траектория возврата на ближайший к текущему местоположению БПЛА 1 запомненный с помощью средств 4 аэродром посадки, формируются сигналы траекторного управления, характеризующие заданные курс, высоту и приборную скорость, при использовании сохраненного МПД2 и текущих параметров положения и движения БПЛА 1 с датчиков 3 и формируются сигналы управления рулями аэродинамических органов управления и силовой установкой.
Также система управления 5 формируют сигнализацию для выдачи оператору на пункт управления 2. Сформированная сигнализация передается через радиоканал с использованием средств связи 7 и 9 на пост управления 10 пункта управления 2. Сигнализация предназначена для информирования оператора, прежде всего, об отказе управляющей системы 6 и активации режима «резервный возврат», при этом может быть предусмотрена выдача иной информации.
Преимущественно, на пункт управления 2 передаются данные с системы 6 о параметрах положения, движения и технического состояния БПЛА 1, которые используются для индикации оператору при полете по заранее запрограммированной траектории, также такие данные могут поступать с системы 5 при полете в режиме «резервный возврат».
В системах 5-6 формируются абсолютная барометрическая высота, барометрическая высота относительно аэродрома посадки, скоростной напор и приборная скорость. Барометрическая высота полета относительно аэродрома посадки формируется по данным о статическом давлении и температуре с датчиков 3, давлении атмосферы на посадочной позиции и параметрам «стандартной атмосферы», также хранящихся в средствах для запоминания 8 и 4.
Возврат на аэродром посадки может осуществляться, например, следующим образом.
Траектория полета в вертикальной плоскости представляет собой снижение в точку, отстоящую на 1-2 км по горизонтали от точки 3-го разворота до высоты «круга» (500-600м) (фиг. 2).
В горизонтальной плоскости осуществляется выход в точку, отстоящую на заданной дальности (15-20 км) от порога ВПП аэродрома посадки, с заданным направлением (посадочной полосы) на нее (фиг. 3). Формирование заданного угла курса для реализации такой траектории осуществляется системой управления 5 на основе комбинированного способа управления и с использованием данных об аэродроме посадке, имеющихся в средствах для запоминания 4 системы 5. Полет в точку 3-го разворота, по касательной к окружности 3-4-го разворотов, осуществляется по кратчайшему расстоянию (путевой способ траекторного управления), далее осуществляются 3-й и 4-й развороты с выходом БПЛА в точку, отстоящую на заданной дальности и с направлением на ВПП.
Полунатурная отработка системы показала ее эффективность.
Таким образом, использование предлагаемой группы изобретений позволяет повысить безопасность полета БПЛА за счет резервирования функций управляющей системы в части формирования траектории возврата.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ПОЛЕТОМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И БЕСПИЛОТНАЯ АВИАЦИОННАЯ СИСТЕМА | 2012 |
|
RU2523613C2 |
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ПОЛЕТОМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И БЕСПИЛОТНАЯ АВИАЦИОННАЯ СИСТЕМА | 2011 |
|
RU2475802C1 |
| КОМПЛЕКС УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2004 |
|
RU2270471C1 |
| Способ управления полётом беспилотного летательного аппарата | 2022 |
|
RU2816327C1 |
| Интегрированный комплекс бортового оборудования беспилотного летательного аппарата | 2019 |
|
RU2767938C2 |
| Способ управления беспилотным летательным аппаратом | 2019 |
|
RU2729905C1 |
| Способ обеспечения централизованного управления группы беспилотных летательных аппаратов с использованием сервера-агрегатора | 2023 |
|
RU2809495C1 |
| АЭРОМОБИЛЬНЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ВЕРТОЛЕТНОГО ТИПА | 2022 |
|
RU2792314C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ РЕЗЕРВНОГО ВОЗВРАТА ОДНОМЕСТНОГО БОЕВОГО ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ОТКАЗЕ ЦЕНТРАЛЬНОГО ВЫЧИСЛИТЕЛЯ | 2023 |
|
RU2807539C1 |
| БЕСПИЛОТНАЯ АВИАЦИОННАЯ СИСТЕМА | 2020 |
|
RU2741854C1 |
Группа изобретений относится к способу управления полетом БПЛА и беспилотной авиационной системе. Для управления полетом измеряют параметры положения и движения БПЛА, формируют управляющей системой по заранее запрограммированной траектории управляющие сигналы автоматического траекторного управления полетом, формируют по ним системой управления сигналы управления рулевыми приводами аэродинамических органов управления и силовой установкой, а при отказе управляющей системы осуществляют возврат на аэродром посадки, параметры которого запоминают в управляющей системе, и формируют сигнализацию для выдачи оператору на пункт управления. Беспилотная авиационная система содержит пункт управления и БПЛА, в котором находятся управляющая система, система управления, бортовые навигационные датчики. Обеспечивается повышение безопасности полета БПЛА. 2 н. и 5 з.п. ф-лы, 3 ил.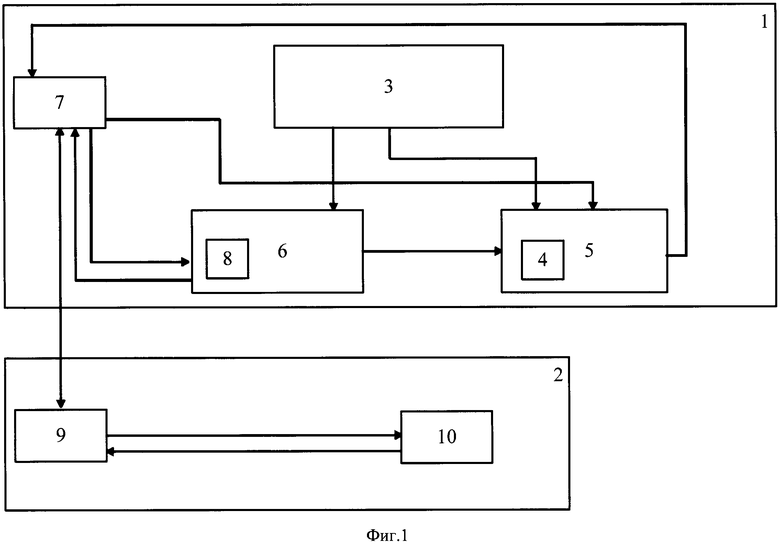
1. Способ управления полетом БПЛА, включающий измерение параметров положения и движения БПЛА, формирование управляющей системой по заранее запрограммированной траектории управляющих сигналов автоматического траекторного управления полетом и формирование по ним системой управления сигналов управления рулевыми приводами аэродинамических органов управления и силовой установкой, отличающийся тем, что посредством системы управления запоминают параметры по меньшей мере одного аэродрома посадки, контролируют исправность управляющей системы, а при ее отказе выполняют возврат на аэродром посадки и формируют сигнализацию для выдачи оператору на пункт управления.
2. Способ по п. 1, отличающийся тем, что выполняют возврат на ближайший аэродром посадки.
3. Способ по п. 1, отличающийся тем, что перед возвратом посредством системы управления осуществляют приведение БПЛА к горизонту и стабилизацию текущих траекторных параметров полета.
4. Беспилотная авиационная система, включающая соединенные посредством радиоканала пункт управления и БПЛА, который содержит соединенные между собой систему управления, управляющую систему со средствами для запоминания полетных данных и бортовые навигационные датчики, отличающаяся тем, что система управления содержит средства для запоминания параметров по меньшей мере одного аэродрома посадки и выполнена с возможностью контроля исправности управляющей системы, а в случае ее отказа - выполнения возврата на аэродром посадки и формирования сигнализации для выдачи оператору на пункт управления.
5. Система по п. 4, отличающаяся тем, что пункт управления содержит средства связи и пост управления со средствами управления, индикации и сигнализации.
6. Система по п. 4, отличающаяся тем, что система управления выполнена с возможностью выполнения возврата на ближайший аэродром посадки.
7. Система по п. 4, отличающаяся тем, что система управления выполнена с возможностью осуществлять приведение БПЛА к горизонту и стабилизацию текущих траекторных параметров полета перед возвратом.
| US 0009257048 B1, 09.02.2016 | |||
| СПОСОБ ПИЛОТИРОВАНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2634470C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ ПРИ ВЫХОДЕ НА ЛИНИЮ ВЗЛЕТНО-ПОСАДОЧНОЙ ПОЛОСЫ | 2003 |
|
RU2240589C1 |
| RU 2016138408 A, 02.04.2018 | |||
| СПОСОБ ОБЕСПЕЧЕНИЯ АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2666479C1 |
| US 20180224848 A1, 09.04.2018. | |||

