Изобретение относится к области бесконтактной диагностики и может быть использовано при дефектоскопическом контроле состояния (участков напряженно-деформированного состояния металла трубопровода, нарушения целостности трубопровода и изоляционного покрытия и т.п.) нефте- и газопроводов, а также других подводных и/или подземных металлических трубопроводов.
Известно устройство для диагностики технического состояния металлического трубопровода, содержащее систему датчиков магнитного поля, аналого-цифровой преобразователь (АЦП), блок генерации и деления частоты, блок управления, клавиатуру, блок отображения информации, блок абсолютной географической привязки, блок памяти, блок акселерометров, блок усиления сигналов датчиков магнитного поля, блок аналогового вычитания и блок питания датчиков магнитного поля, при этом выход блока генерации и деления частоты соединен с первым входом АЦП, первый выход блока управления соединен со входом блока памяти, выход клавиатуры соединен с третьим входом блока управления, выход блока питания датчиков магнитного поля соединен со входом системы датчиков магнитного поля, выход которой соединен с первым входом блока усиления сигналов датчиков магнитного поля, к первому выходу блока усиления сигналов датчиков магнитного поля подсоединен второй вход АЦП, к третьему входу которого подсоединен выход блока аналогового вычитания, ко входу которого подключен второй выход блока усиления сигналов датчиков, выход АЦП подключен к первому входу блока управления, ко второму входу которого подключен выход блока абсолютной географической привязки, к четвертому входу блока управления подсоединен выход блока акселераторов, а второй выход блока управления соединен со входом блока отображения информации; в качестве датчиков магнитного поля использованы магниторезисторы, при этом блок питания датчиков магнитного поля выполнен в виде стабилизированного источника постоянного тока, RU 86015 U1.
Недостатком данного технического решения является возможность измерения только двух компонент магнитного поля трубопровода, а именно, по продольной оси трубопровода (оси Y) и по вертикальной оси (оси Z). Неполная картина магнитного поля обусловливает существенные погрешности результатов дефектоскопии.
Известен также магнитный дефектоскоп для контроля подземных металлических трубопроводов без вскрытия грунта, содержащий первый и второй преобразователи магнитного поля, первый преобразователь магнитного поля содержит не менее двух датчиков магнитного поля, которые установлены вдоль оси трубопровода, второй преобразователь магнитного поля содержит не менее двух датчиков магнитного поля, которые установлены вдоль линии, перпендикулярной продольной оси трубопровода и поверхности грунта, контроллер с клавиатурой, блок отображения информации, первый и второй усилители, аналого-цифровой преобразователь (АЦП), первый и второй программно управляемые аттенюаторы, блок аналогового вычитания, блок питания преобразователей магнитного поля, промежуточный блок памяти, блок пространственной привязки, блок памяти и блок акселерометров, преобразователи магнитного поля расположены над поверхностью грунта над трубопроводом, при этом первый выход блока питания преобразователей магнитного поля соединен со входом первого преобразователя магнитного поля, второй его выход соединен со входом второго преобразователя магнитного поля, первый выход второго усилителя соединен со вторым входом блока аналогового вычитания, первый вход которого соединен с первым выходом первого усилителя, первый вход которого соединен с выходом первого программно управляемого аттенюатора, вход которого соединен с выходом первого преобразователя магнитного поля, первый выход блока аналогового вычитания соединен с первым входом промежуточного блока памяти, а второй его выход соединен с четвертым входом промежуточного блока памяти, выход которого соединен со входом АЦП, второй выход первого усилителя соединен со вторым входом промежуточного блока памяти, третий вход которого соединен со вторым выходом второго усилителя, первый выход контроллера соединен со вторым входом первого программно управляемого аттенюатора, третий выход контроллера соединен со вторым входом второго программно управляемого аттенюатора, первый вход которого соединен с выходом второго преобразователя магнитного поля, а выход соединен со входом второго усилителя, третий вход контроллера соединен с выходом блока акселерометров, четвертый выход контроллера соединен со входом блока памяти, второй вход контроллера соединен с выходом блока пространственной привязки, выход АЦП соединен с первым входом контроллера, выход клавиатуры соединен с четвертым входом контроллера, второй выход контроллера соединен со входом блока отображения информации; в качестве датчиков магнитного поля использованы магниторезисторы, при этом блок питания преобразователей магнитного поля выполнен в виде стабилизированного источника постоянного тока, RU 86316 U1.
Данное техническое решение обеспечивает некоторое повышение точности определения состояния трубопровода за счет уменьшения влияния внешних помех, а также снижения собственных помех устройства, однако оно сохраняет все недостатки описанного выше аналога, поскольку измерение магнитного поля трубопровода осуществляется только по двум осям - Y и Z.
Известно устройство для контроля состояния металлических трубопроводов без вскрытия грунта, содержащее первый и второй преобразователи магнитного поля, первый преобразователь магнитного поля содержит не менее двух датчиков магнитного поля в виде магниторезисторов, второй преобразователь магнитного поля содержит не менее двух датчиков магнитного поля в виде магниторезисторов, датчики магнитного поля первого и второго преобразователей магнитного поля установлены вдоль взаимно перпендикулярных линий, контроллер с клавиатурой, блок отображения информации, первый и второй усилители, аналого-цифровой преобразователь (АЦП), первый и второй программно управляемые аттенюаторы, блок аналогового вычитания, стабилизированный источник постоянного тока, промежуточный блок памяти, блок пространственной привязки, блок памяти и блок акселерометров, преобразователи магнитного поля расположены над поверхностью грунта над трубопроводом, при этом первый выход стабилизированного источника постоянного тока соединен со входом первого преобразователя магнитного поля, второй его выход соединен со входом второго преобразователя магнитного поля, первый выход второго усилителя соединен со вторым входом блока аналогового вычитания, первый вход которого соединен с первым выходом первого усилителя, первый вход которого соединен с выходом первого программно управляемого аттенюатора, вход которого соединен с выходом первого преобразователя магнитного поля, первый выход блока аналогового вычитания соединен с первым входом промежуточного блока памяти, а второй его выход соединен с четвертым входом промежуточного блока памяти, выход которого соединен со входом АЦП, второй выход первого усилителя соединен со вторым входом промежуточного блока памяти, третий вход которого соединен со вторым выходом второго усилителя, первый выход контроллера соединен со вторым входом первого программно управляемого аттенюатора, третий выход контроллера соединен со вторым входом второго программно управляемого аттенюатора, первый вход которого соединен с выходом второго преобразователя магнитного поля, а выход соединен со входом второго усилителя, третий вход контроллера соединен с выходом блока акселерометров, четвертый выход контроллера соединен со входом блока памяти, второй вход контроллера соединен с выходом блока пространственной привязки, выход АЦП соединен с первым входом контроллера, выход клавиатуры соединен с четвертым входом контроллера, второй выход контроллера соединен со входом блока отображения информации; устройство дополнительно содержит третий преобразователь магнитного поля, который содержит не менее двух датчиков магнитного поля в виде магниторезисторов, которые установлены вдоль линии, перпендикулярной линиям, вдоль которых расположены датчики первого и второго преобразователей магнитного поля, третий программно управляемый аттенюатор, третий усилитель и блок формирования управляющего сигнала, при этом третий выход стабилизированного источника постоянного тока соединен со входом третьего преобразователя магнитного поля, выход которого соединен со входом третьего программно управляемого аттенюатора, выход которого соединен со входом третьего усилителя, выход которого соединен с третьим входом блока аналогового вычитания, третий выход которого соединен со входом блока формирования управляющего сигнала, выход которого соединен с системой управления устройством, RU 108846 U1.
Устройство обеспечивает измерение магнитного поля для осуществления дефектоскопии только по осям Y и Z. Измерение данным устройством магнитного поля по оси Х обеспечивают только определение местоположения дефектоскопа относительно продольной оси трубопровода и выработки управляющего сигнала для компенсации отклонения дефектоскопа от продольной оси трубопровода. Это обусловлено тем, что чувствительность канала измерений по оси Х для определения местоположения дефектоскопа должна быть в десятки раз ниже, нежели чувствительность каналов измерений по осям Y и Z для осуществления дефектоскопии, поскольку при высокой чувствительности канала измерений по оси Х на выработку управляющего сигнала будут влиять не только отклонения положения дефектоскопа от продольной оси трубопровода, но также дефекты трубопровода, в том числе и незначительные. Таким образом, устройство позволяет осуществлять дефектоскопию с использованием измерений магнитного поля только по двум осям, что вносит существенные погрешности в определение параметров поля и, соответственно, в результаты дефектоскопии.
Известно устройство для диагностики технического состояния металлических трубопроводов, описанное в RU 2453760 С2.
Устройство включает два трехкомпонентных датчика индукции магнитного поля, которые расположены на разных уровнях по высоте относительно контролируемого трубопровода. Каждый из датчиков содержит три измерителя индукции магнитного поля, расположенных по осям координат X, Y, Z, где ось Х - расположена в горизонтальной плоскости и перпендикулярна продольной оси трубопровода, ось Y расположена параллельно продольной оси трубопровода, ось Z перпендикулярна осям Х и Y. Устройство также содержит усилители сигналов измерителей, аналогово-цифровой преобразователь (АЦП), контроллер, блок памяти и устройство отображения информации. В качестве датчиков магнитного поля использованы феррозонды. Каждый из датчиков снабжен аналоговым устройством определения разности значений индукции магнитного поля.
Данное техническое решение принято в качестве прототипа настоящего изобретения.
Недостатки прототипа состоят в том, что определяются только скалярные величины - отдельные компоненты магнитного поля: по осям X, Y, Z, а также разностные значения одноименных компонент магнитного поля, измеряемых на разных уровнях по высоте относительно трубопровода (трехкомпонентные датчики 1 и 2).
Однако измерение отдельных компонент магнитного поля и определение разности одноименных компонент не дает достаточно полной картины магнитного поля трубопровода и, соответственно, достоверно выявить все флуктуации магнитного поля и определить их форму, что необходимо для их надежной интерпретации (корреляции с дефектами трубопровода).
Что касается наличия в устройстве-прототипе датчиков 3 и 4, находящихся в горизонтальной плоскости, то разностные значения одноименных компонент магнитного поля, измеряемых датчиками 3 и 4, практически, равны нулю, поскольку градиент индукции магнитного поля трубопровода изменяется по радиусу от его центральной продольной оси.
Задачей настоящего изобретения является обеспечение возможности установить полную и достоверную картину флуктуации магнитного поля, включая их величину и форму.
Согласно изобретению устройство для диагностики технического состояния металлических трубопроводов, содержащее, по меньшей мере, два трехкомпонентных датчика индукции магнитного поля, расположенных на разных уровнях по высоте относительно трубопровода, каждый из которых содержит три измерителя индукции магнитного поля, расположенных, соответственно, по осям координат X, Y, Z, где ось Х расположена в горизонтальной плоскости и перпендикулярна продольной оси трубопровода, ось Y расположена параллельно продольной оси трубопровода, ось Z перпендикулярна осям Х и Y, а также содержащее первый и второй усилители, аналогово-цифровой преобразователь (АЦП), устройство определения разности значений индукции магнитного поля по осям X, Y, Z, контроллер, блок памяти и устройство отображения информации, при этом первый, второй и третий измерители первого трехкомпонентного датчика соединены, соответственно, с первым, вторым и третьим входами первого усилителя, первый, второй и третий измерители второго трехкомпонентного датчика соединены, соответственно с первым, вторым и третьим входами второго усилителя, выходы первого и второго усилителей соединены, соответственно, с первым и вторым входами АЦП, первый выход контроллера соединен с блоком памяти, а второй его выход соединен с устройством отображения информации, дополнительно содержит блок определения величины и направления полного вектора индукции магнитного поля, измеряемой первым трехкомпонентным датчиком, блок определения величины и направления полного вектора индукции магнитного поля, измеряемой вторым трехкомпонентным датчиком, и блок определения разности и угла между полными векторами индукции магнитного поля, измеряемой первым и вторым трехкомпонентными датчиками, устройство определения разности значений индукции магнитного поля по осям X, Y, Z выполнено в виде блока цифрового вычитания, при этом первый выход АЦП соединен со входом блока цифрового вычитания, выход которого соединен с первым входом контроллера, вход блока определения направления полного вектора магнитной индукции первым трехкомпонентным датчиком соединен со вторым выходом АЦП, а выход этого блока соединен с первым входом блока определения разности и угла между полными векторами первого и второго трехкомпонентных датчиков, вход блока определения полного вектора магнитной индукции вторым трехкомпонентным датчиком соединен с третьим выходом АЦП, а выход этого блока соединен со вторым входом блока определения разности и угла между полными векторами первого и второго трехкомпонентных датчиков, выход которого соединен со вторым входом контроллера.
Заявителем не выявлены какие-либо технические решения, идентичные заявленному, что позволяет сделать вывод о соответствии изобретения критерию «Новизна».
Реализация отличительных признаков изобретения обеспечивает принципиально новое свойство объекта (технический результат), состоящее в обеспечении возможности определения полной и достоверной картины флуктуации магнитного поля, включая величину и форму флуктуации, поскольку в дополнение к отдельным компонентам магнитного поля по осям X, Y, Z и разности значений одноименных компонент (скалярные величины) определяются полные векторы индукции магнитного поля каждым трехкомпонентным датчиком (векторные величины), угол между этими векторами и разность величин векторов. Изменения указанных дополнительных факторов, характеризующих магнитное поле, позволяют точно определять по ним наличие и характер дефектов трубопровода, в том числе тех, диагностика которых только с учетом градиента магнитного поля невозможна.
Указанные обстоятельства позволяют сделать вывод о соответствии изобретения условию патентоспособности «Изобретательский уровень».
Сущность изобретения поясняется чертежами, где изображено:
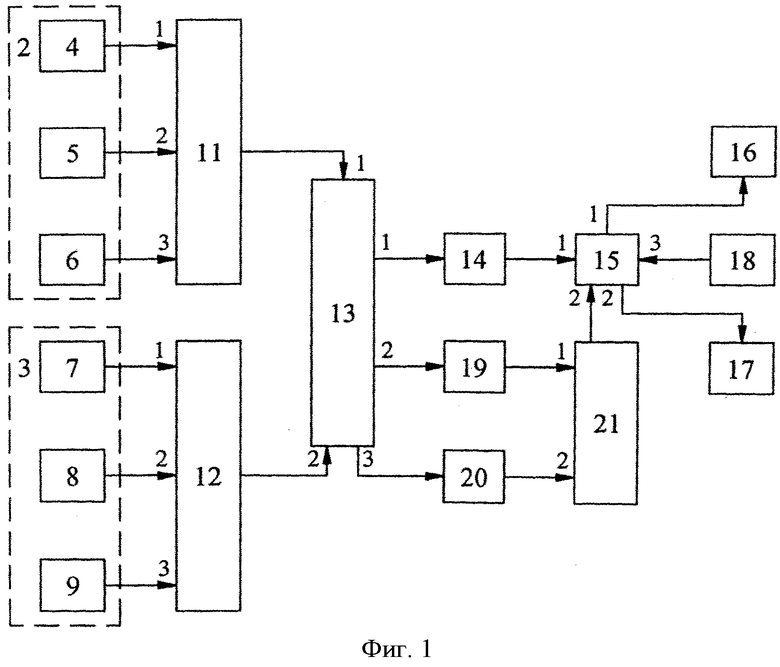
на фиг.1 - блок-схема устройства;
на фиг.2 - схема, иллюстрирующая расположение датчиков, относительно трубопровода.
Устройство для диагностики технического состояния металлических трубопроводов 1 содержит два трехкомпонентных датчика 2,3 индукции магнитного поля. Датчики 2,3 расположены на разных уровнях по высоте относительно трубопровода 1 с учетом измерения градиента его магнитного поля, изменяющегося в радиальном направлении. Датчик 2 содержит измерители 4, 5, 6, а датчик 3 - измерители 7, 8, 9 индукции магнитного поля. Измерители 4, 7 расположены по осям X, измерители 5, 8 - по осям Y, а измерители 6, 9 - по осям Z координат. В качестве измерителей 4, 5, 6, 7, 8, 9 использованы измерители индукции магнитного поля HONEYWELL HMC1053. Оси Х расположены в горизонтальной плоскости и перпендикулярны продольной оси 10 трубопровода 1, оси Y параллельны оси 10, а оси Z перпендикулярны осям X, Y. Устройство содержит первый 11 и второй 12 усилители, выполненные на базе микросхем AD8642. В качестве АЦП 13 использована микросхема КНПС. 466512.001. Устройство определения разности значений индукции магнитного поля по осям X, Y, Z выполнено в виде блока 14 цифрового вычитания на базе контроллера типа Melsek-FSG. Устройство для диагностики технического состояния металлических трубопроводов также содержит контроллер 15 на базе микросхемы КНПС. 467441.001, блок 16 памяти на базе микросхемы КНПС. 467669.001, устройство 17 отображения информации, представляющее собой жидкокристаллический монитор LM4228, клавиатуру 18 типа НИК0. 467126.061, блоки 19 и 20 определения величины и направления полных векторов индукции магнитного поля, измеряемой, соответственно, датчиками 2 и 3, а также блок 21 определения разности и угла между полными векторами индукции магнитного поля, измеряемой датчиками 2 и 3. Блоки 19, 20, 21 выполнены на базе микросхем Advantech PCM 9370.
Первый, второй и третий измерители 4, 5, 6 первого трехкомпонентного датчика 2 соединены, соответственно, с первым, вторым и третьим входами первого усилителя 11, первый, второй и третий измерители 7, 8, 9 второго трехкомпонентного датчика 3 соединены, соответственно, с первым, вторым и третьим входами второго усилителя 12, выходы первого 11 и второго 12 усилителей соединены, соответственно, с первым и вторым входами АЦП 13, первый выход контроллера 15 соединен с блоком 16 памяти, а второй его выход соединен с устройством 17 отображения информации. К третьему входу контроллера 15 подключена клавиатура 18. Первый выход АЦП 13 соединен со входом блока 14 цифрового вычитания, выход которого соединен с первым входом контроллера 15, второй выход АЦП 13 соединен со входом блока 19 определения направления полного вектора магнитной индукции первым трехкомпонентным датчиком 2, выход блока 19 соединен с первым входом блока 21 определения разности и угла между полными векторами первого и второго трехкомпонентных датчиков, третий выход АЦП соединен со входом блока 20 определения полного вектора магнитной индукции вторым трехкомпонентным датчиком, выход блока 20 соединен со вторым входом блока 21 определения разности и угла между полными векторами индукции магнитного поля, измеряемой первым и вторым трехкомпонентными датчиками, выход блока 21 соединен со вторым входом контроллера 15.
Устройство работает следующим образом.
Магнитное поле металлического трубопровода 1 воспринимается измерителями 4, 5, 6 первого и 7, 8, 9 второго трехкомпонентных датчиков 2 и 3 магнитного поля. Совокупность измерителей 4, 5, 6 позволяет получить картину магнитного поля по трем координатам X, Y, Z на более удаленном от трубопровода уровне, а совокупность измерителей 7, 8, 9 позволяет получить картину магнитного поля трубопровода на уровне, более близком к трубопроводу.
Измерители магнитного поля 4, 5, 6 и 7, 8, 9 преобразуют магнитное поле трубопровода в напряжение, пропорциональное величине магнитной индукции этого поля; напряжение подается на усилители 11 и 12. С выходов усилителей 11, 12 аналоговые сигналы подаются на входы, соответственно, на первый и второй входы АЦП 13, где преобразуются в цифровой код, который с первого выхода АЦП 13 поступает на вход устройства 14 цифрового вычитания для определения градиента магнитной индукции по каждой отдельной оси - X, Y, Z. Соответствующий сигнал с выхода устройства 14 поступает на первый вход контроллера 15. Со второго выхода АЦП 13 сигнал, содержащий информацию о значениях магнитной индукции, измеряемой датчиком 2, по каждой компоненте X, Y, Z поступает на блок 19 определения величины и направления полного вектора магнитной индукции, измеряемой первым трехкомпонентным датчиком 2, а с третьего выхода АЦП 13 сигнал, содержащий информацию о значениях магнитной индукции, измеряемой датчиком 3 по каждой компоненте X, Y, Z поступает на блок 20 определения величины и направления полного вектора магнитной индукции, измеряемой вторым трехкомпонентным датчиком 3. Направления векторов однозначно определяются по соотношению отдельных компонент поля по трем осям X, Y, Z. С выходов блока 19 и блока 20 сигналы поступают на блок 21 определения разности и угла между полными векторами индукции магнитного поля, измеряемой первым и вторым трехкомпонентными датчиками 2, 3.
Таким образом, на вход 1 контроллера 15 поступает сигнал с блока цифрового вычитания 14, определяющий разность скалярных величин -значений магнитной индукции, по осям X, Y, Z на двух уровнях от трубопровода, а на вход 2 контроллера 15 поступает сигнал с блока 21 определения разности и угла между полными векторами индукции магнитного поля, определенными на двух уровнях от трубопровода. После обработки информации контроллером 15, управляемым с помощью клавиатуры 18, данные записываются в блок памяти 16 и выносятся на устройство отображения информации 17.
Благодаря тому, что в данном устройстве определяется не только градиент индукции магнитного поля по осям X, Y, Z, но и определяется угол между полными векторами на различных уровнях от трубопровода и их разность, обеспечивается возможность наиболее полно определить картину магнитного поля трубопровода и, соответственно, величину и форму флуктуации магнитного поля, которые связаны с различными повреждениями трубопровода, в том числе и с теми, которые не определяются только по градиенту индукции магнитного поля.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для бесконтактной магнитометрической диагностики технического состояния стальных трубопроводов с учетом величины фонового магнитного поля | 2020 |
|
RU2731117C1 |
| УСТРОЙСТВО ДЛЯ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ МЕТАЛЛИЧЕСКИХ ТРУБОПРОВОДОВ | 2021 |
|
RU2763963C1 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ (ВАРИАНТЫ) | 2009 |
|
RU2453760C2 |
| Устройство для магнитометрической диагностики наземных трубопроводов и емкостей без удаления изоляционного покрытия | 2020 |
|
RU2736143C1 |
| ВНУТРИТРУБНЫЙ СНАРЯД-ДЕФЕКТОСКОП С РЕЗЕРВИРОВАННЫМИ ДАТЧИКАМИ ДЕФЕКТОВ И ОДОМЕТРАМИ | 2009 |
|
RU2406082C1 |
| СПОСОБ И УСТРОЙСТВО ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2012 |
|
RU2510500C1 |
| Способ измерения длины подземного трубопровода | 2017 |
|
RU2662246C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДЕФЕКТОВ ТРУБОПРОВОДА И ВРЕЗОК В ТРУБОПРОВОД И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2742631C2 |
| СПОСОБ И УСТРОЙСТВО ДИАГНОСТИКИ ТЕХНИЧЕСКИХ ПАРАМЕТРОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2016 |
|
RU2634755C2 |
| СПОСОБ И УСТРОЙСТВО ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ПОДЗЕМНЫХ ТРУБОПРОВОДОВ | 2012 |
|
RU2504763C1 |
Изобретение относится к измерительной технике, в частности средствам бесконтактной диагностики, представляет собой устройство для диагностики технического состояния металлических трубопроводов и может быть использовано при дефектоскопическом контроле состояния, например напряженно-деформированного состояния металла трубопровода, нарушения целостности трубопровода и изоляционного покрытия и т.п., подводных и/или подземных нефте- и газопроводов и других металлических трубопроводов. Устройство содержит, по меньшей мере, два трехкомпонентных датчика индукции магнитного поля, расположенных на разных уровнях по высоте относительно трубопровода, первый и второй усилители, аналогово-цифровой преобразователь (АЦП), устройство определения разности значений индукции магнитного поля по осям X, Y, Z, контроллер, блок памяти и устройство отображения информации. Дополнительно устройство содержит блок определения величины и направления полного вектора индукции магнитного поля, измеряемой первым трехкомпонентным датчиком, блок определения величины и направления полного вектора индукции магнитного поля, измеряемой вторым трехкомпонентным датчиком, и блок определения разности и угла между полными векторами индукции магнитного поля, измеряемой первым и вторым трехкомпонентными датчиками. Обеспечивается возможность установить полную и достоверную картину флуктуации магнитного поля, включая их величину и форму. 2 ил.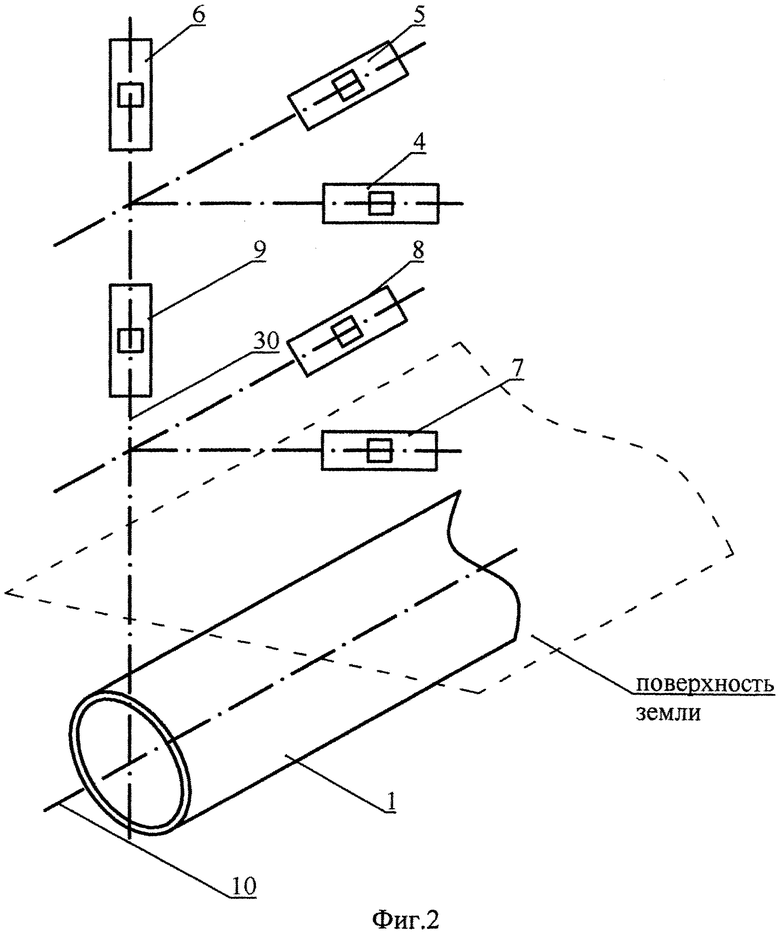
Устройство для диагностики технического состояния металлических трубопроводов, содержащее, по меньшей мере, два трехкомпонентных датчика индукции магнитного поля, расположенных на разных уровнях по высоте относительно трубопровода, каждый из которых содержит три измерителя индукции магнитного поля, расположенных, соответственно, по осям координат X, Y, Z, где ось Х расположена в горизонтальной плоскости и перпендикулярна продольной оси трубопровода, ось Y расположена параллельно продольной оси трубопровода, ось Z перпендикулярна осям Х и Y, а также содержащее первый и второй усилители, аналогово-цифровой преобразователь (AЦП), устройство определения разности значений индукции магнитного поля по осям X, Y, Z, контроллер, блок памяти и устройство отображения информации, при этом первый, второй и третий измерители первого трехкомпонентного датчика соединены, соответственно, с первым, вторым и третьим входами первого усилителя, первый, второй и третий измерители второго трехкомпонентного датчика соединены, соответственно с первым, вторым и третьим входами второго усилителя, выходы первого и второго усилителей соединены, соответственно, с первым и вторым входами АЦП, первый выход контроллера соединен с блоком памяти, а второй его выход соединен с устройством отображения информации, отличающееся тем, что дополнительно содержит блок определения величины и направления полного вектора индукции магнитного поля, измеряемой первым трехкомпонентным датчиком, блок определения величины и направления полного вектора индукции магнитного поля, измеряемой вторым трехкомпонентным датчиком, и блок определения разности и угла между полными векторами индукции магнитного поля, измеряемой первым и вторым трехкомпонентными датчиками, устройство определения разности значений индукции магнитного поля по осям X, Y, Z выполнено в виде блока цифрового вычитания, при этом первый выход АЦП соединен со входом блока цифрового вычитания, выход которого соединен с первым входом контроллера, вход блока определения направления полного вектора магнитной индукции первым трехкомпонентным датчиком соединен со вторым выходом АЦП, а выход этого блока соединен с первым входом блока определения разности и угла между полными векторами первого и второго трехкомпонентных датчиков, вход блока определения полного вектора магнитной индукции вторым трехкомпонентным датчиком соединен с третьим выходом АЦП, а выход этого блока соединен со вторым входом блока определения разности и угла между полными векторами первого и второго трехкомпонентных датчиков, выход которого соединен со вторым входом контроллера.
| Способ вырезки образцов из сварных соединений трубопроводов, коллекторов и других деталей для производства металлографических исследований и механических и других испытаний шва и материала трубы | 1954 |
|
SU101206A1 |
| СПОСОБ БЕСКОНТАКТНОГО ВЫЯВЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И ХАРАКТЕРА ДЕФЕКТОВ МЕТАЛЛИЧЕСКИХ СООРУЖЕНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2264617C2 |
| US 7414395 B2, 19.08.2008 | |||
| US 6727695 B2, 27.04.2004 | |||
| СПОСОБ ЭЛЕКТРОМАГНИТНОЙ ДЕФЕКТОСКОПИИ ОБСАДНЫХ КОЛОНН В СКВАЖИНЕ И ЭЛЕКТРОМАГНИТНЫЙ ДЕФЕКТОСКОП ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2330276C2 |

