Предлагаемое устройство относится к электромеханике и автоматике и может быть использовано для реализации циклических движений. Это могут быть манипуляторы, токарные станки для обработки некруглых деталей и другие устройства, для которых характерны циклические движения.
Известно устройство в виде непрерывной следящей системы автоматического регулирования циклического действия, в которой при определенных условиях от цикла к циклу снижается ошибка регулирования (авт. свидетельство СССР №723510, бюл. изобретений №11, стр.193, 1980). Снижение ошибки в устройстве достигается посредством включения в цепи обратной связи системы устройств памяти, фиксирующих систематические ошибки текущего цикла, а затем по определенному алгоритму реализуется снижение ошибки для последующего цикла.
Известное устройство имеет недостатки.
В устройстве реализован вариант следящей системы с гиперустойчивым объектом регулирования, что предполагает, согласно теории автоматического регулирования, положительность действительной части его комплексного коэффициента передачи. Однако на практике этот случай встречается достаточно редко, поэтому упомянутое устройство имеет ограниченное применение, лишь для объектов регулирования невысокого порядка. Применение устройства в системе с объектом регулирования второго порядка и выше приводит к неустойчивости системы, что является недостатком.
Известно также устройство в виде двухканального электропривода, патент РФ №2223592, 10.02.2004, бюл. №4 (прототип), содержащее исполнительный орган, расположенный на подвижной платформе, первый электропривод перемещения подвижной платформы, датчик перемещения подвижной платформы, первый блок задания перемещения подвижной платформы, последовательно соединенный с первым сумматором, второй вход которого соединен с датчиком перемещения подвижной платформы, а выход соединен со входом первого электропривода перемещения подвижной платформы, второй электропривод перемещения исполнительного органа относительно платформы, датчик перемещения исполнительного органа относительно платформы, второй блок задания перемещения исполнительного органа, последовательно соединенный со вторым сумматором, второй вход которого соединен с датчиком перемещения подвижной платформы, третий вход которого соединен с датчиком перемещения исполнительного органа относительно платформы, третий сумматор, фильтр. Кроме того, оно снабжено блоком динамической модели второго электропривода перемещения исполнительного органа относительно платформы, четвертым сумматором, первым и вторым блоками задержки, пропорциональным блоком, причем блок динамической модели второго электропривода входом соединен с выходом первого сумматора, выходом соединен с первым входом четвертого сумматора, второй вход четвертого сумматора соединен с выходом первого блока задания перемещения подвижной платформы, третий вход четвертого сумматора соединен с выходом второго блока задания перемещения исполнительного органа, четвертый вход четвертого сумматора соединен с датчиком перемещения исполнительного органа относительно платформы, а выход четвертого сумматора соединен со входом пропорционального блока, последовательно соединенного через третий сумматор с первым блоком задержки, фильтр выходом соединен со вторым входом третьего сумматора; вход фильтра соединен с выходом второго блока задержки, вход второго блока задержки соединен с выходом первого блока задержки и одновременно с четвертым входом второго сумматора.
Упомянутое устройство предназначено для реализации циклических движений в двухканальном электроприводе поперечной подачи в станках для токарной обработки некруглых деталей. Для снижения циклических ошибок в нем реализован принцип самообучения в применении к точному каналу. В устройстве применена последовательная коррекция объекта регулирования, корректирующее устройство реализовано в виде звена опережения, а время опережения определяется из условия аппроксимации переходной функции объекта регулирования одним эквивалентным звеном запаздывания. При этом контур самообучения включает два последовательно соединенных блока задержки на суммарное время цикла Т, охваченных обратной связью через фильтр.
Корректирующий сигнал в устройстве формируется на выходе первого блока задержки и через четвертый вход второго сумматора поступает на объект регулирования - электропривод точного канала. Устройство работает устойчиво во всем диапазоне частот и при объектах регулирования высокого порядка, что обеспечивается соответствующими параметрами второго блока задержки, а также параметрами фильтра в обратной связи, охватывающей оба блока задержки. При этом присутствие фильтра приводит к появлению установившейся циклической ошибки, величина которой напрямую связана с параметрами фильтра (см. Никольский А.А. Устойчивость самообучающихся электроприводов подачи металлорежущих станков и точность процессов самообучения // Электричество, 2007, №5. - С.38-45).
Техническая задача, решаемая изобретением, состоит в снижений установившейся ошибки при реализации циклических движений. Указанная задача решается путем усовершенствования коррекции объекта регулирования, позволяющей при сохранении устойчивости так изменить параметры фильтра, чтобы добиться снижения установившейся циклической ошибки. При этом коррекция должна быть реализуема на практике.
Технический эффект, достигаемый предлагаемым изобретением, обуславливается применением коррекции, основанной на более точном учете параметров динамической характеристики объекта регулирования путем аппроксимации его переходной функции с использованием n звеньев запаздывания (n>1, чем больше n, тем выше эффект).
Поставленная задача может быть решена, если последовательно с объектом регулирования включить такое корректирующее устройство, комплексный коэффициент передачи которого будет комплексно-сопряженным с коэффициентом передачи объекта регулирования.
Поставленная задача решается тем, что известное устройство для реализации циклических движений, содержащее блок задания, выход которого соединен с первыми входами первого и второго сумматоров, вторые входы первого и второго сумматоров подключены к выходу датчика выходной координаты объекта регулирования, вход которого подключен к выходу второго сумматора, выход первого сумматора через первый вход третьего сумматора соединен со входом первого блока задержки, выход которого через последовательно соединенные второй блок задержки и фильтр подключен ко второму входу третьего сумматора и одновременно к третьему входу второго сумматора, согласно изобретению снабжено подсоединенными к выходу первого блока задержки дополнительными блоками задержки, выходы которых подключены к соответствующим дополнительным входам второго сумматора. При этом все блоки задержки выполнены с параметрами, определяемыми в соответствии с временными координатами точек переходной характеристики объекта регулирования, а время задержки первого блока задержки зависит также и от времени цикла. Рассмотрим этот случай подробнее.
Если переходная функция объекта регулирования h(t) как реакция его на единичный скачок входного сигнала управления (см., например, Фельдбаум А.А., Бутковский А.Г. Методы теории автоматического управления. - М.: Наука, 1971) известна, то ее можно представить в виде совокупности n дискретных по времени значений h(t), где i=1, …, n. Если число n достаточно велико (в пределе n→∞), то передаточную функцию объекта регулирования при этих условиях, с учетом преобразования Лапласа, можно записать в виде:

где σi=h(ti)-h(ti-1) - величины ступенчатых приращений дискретных значений переходной функции для соответствующего дискретного момента времени ti. Такой передаточной функции объекта регулирования, согласно теории автоматического регулирования, соответствует комплексный коэффициент передачи:
Этому коэффициенту передачи, исходя из поставленной выше задачи, соответствует комплексно-сопряженный коэффициент передачи корректирующего устройства в виде:
передаточная функция которого, с учетом вышесказанного:

Полученная передаточная функция корректирующего устройства структурно представляется в виде n параллельно соединенных звеньев опережения 
Циклические системы, в отличие от обычных, всегда включают звенья запаздывания на время цикла Т. При этом, если принять, что значение n достаточно велико, но конечно по величине, указанное выше корректирующее устройство, со звеньями опережения, как будет показано ниже, реализуемо.
На практике число n может быть задано, например, исходя из полученных экспериментально (с помощью современных компьютерных средств) дискретных по времени значений переходной характеристики объекта регулирования h(ti). При этом необходимое время опережения tn, определяемое переходной функцией объекта регулирования, должно быть меньше периода цикличности T. Указанное условие позволяет реализовать корректирующее устройство с ранее полученной передаточной функцией. Кроме того, при включении такого корректирующего устройства между выходом звена запаздывания на период цикличности Т и входом объекта регулирования, в результате структурных преобразований по известным правилам теории автоматического регулирования, звенья опережения преобразуются в реализуемые на практике звенья запаздывания, как это выполнено в прототипе для единственного звена опережения.
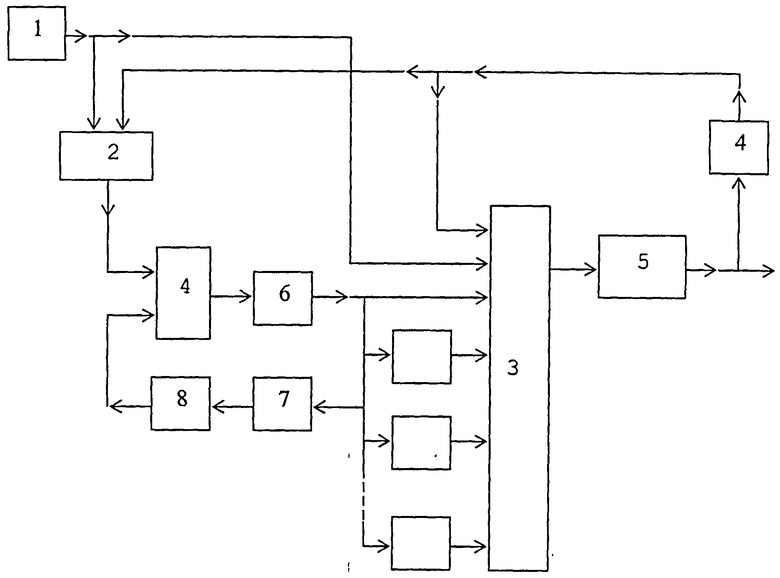
На чертеже представлена блок-схема предлагаемого устройства.
Время задержки первого блока задержки 6, согласно блок-схеме, меньше периода цикличности Т на время tn, время задержки второго блока задержки 7 равно tn, а времена задержки остальных, дополнительных n-1 блоков определяются формулой: tn-ti, где i=1, n-1. Кроме того, значения коэффициентов σi со своими весами учтены непосредственно при суммировании на втором сумматоре 3.
Предлагаемое устройство для реализации циклических движений содержит блок задания 1, выход которого соединен с первыми входами первого 2 и второго 3 сумматоров, вторые входы первого 2 и второго 3 сумматоров подключены к выходу датчика 4 выходной координаты объекта регулирования 5, вход которого подключен к выходу второго сумматора 3, выход первого сумматора 2 через первый вход третьего сумматора 4 соединен со входом первого блока задержки 6, выход которого через последовательно соединенные второй блок задержки 7 и фильтр 8 подключен ко второму входу третьего сумматора 4 и одновременно к третьему входу второго сумматора 3. Кроме того, согласно изобретению, оно снабжено подсоединенными к выходу первого блока задержки 6 n-1 дополнительными блоками задержки, выходы которых подключены к соответствующим дополнительным входам второго сумматора 3, причем все блоки задержки выполнены с параметрами, определяемыми в соответствии с временными координатами дискретных точек переходной функции объекта регулирования 5, а время задержки первого блока задержки 6 зависит также и от времени цикла.
Устройство работает следующим образом.
Циклический сигнал задания подается с выхода блока задания 1 одновременно на первые входы первого 2 и второго 3 сумматоров. Сигнал ошибки на текущем цикле в виде разности сигнала задания и выходного сигнала датчика выходной координаты 4 подается, соответственно, через первый и второй входы второго сумматора 3 на вход объекта регулирования 5. Этот же сигнал ошибки формируется на выходе первого сумматора 2 и, после суммирования с выходным сигналом фильтра 8, поступает на вход первого блока задержки 6. Выходной сигнал первого блока задержки 6 отстает по времени от входного на указанную ранее величину Т-tn. Сигнал управления на текущем цикле формируется во втором сумматоре 3 после суммирования выходных сигналов первого блока задержки 6 и n-1 дополнительных блоков задержки, в соответствии с их весами. При этом, в соответствии с принципом самообучения, сигнал управления воздействует на объект регулирования 5 таким образом, что по сравнению с предыдущим циклом ошибки снижаются, а установившаяся циклическая ошибка достигает своего минимального значения.
Моделирование циклических процессов в предлагаемом устройстве показывает, что описанная выше последовательная коррекция обеспечивает устойчивость системы во всем диапазоне частот и при объектах регулирования высокого порядка. При этом, по сравнению с прототипом, заметно снижаются требования к необходимой фильтрации, что позволяет изменить параметры фильтра и тем самым существенно снизить установившуюся циклическую ошибку, повысить точность воспроизведения задания. Отмеченный эффект от применения предлагаемого устройства обуславливается коррекцией, основанной на более точном учете параметров динамической характеристики объекта регулирования посредством аппроксимации его переходной функции с использованием n звеньев запаздывания (n>1, чем больше n, тем выше эффект).
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХКАНАЛЬНЫЙ ЭЛЕКТРОПРИВОД | 2002 |
|
RU2223592C1 |
| УСТРОЙСТВО ДЛЯ ТОКАРНОЙ ОБРАБОТКИ НЕКРУГЛЫХ ДЕТАЛЕЙ | 2014 |
|
RU2571801C1 |
| УСТРОЙСТВО ДЛЯ ПОВЫШЕНИЯ ТОЧНОСТИ ТОКАРНОЙ ОБРАБОТКИ НЕКРУГЛЫХ ДЕТАЛЕЙ | 2008 |
|
RU2393952C1 |
| УСТРОЙСТВО ДЛЯ ТОКАРНОЙ ОБРАБОТКИ НЕКРУГЛЫХ ДЕТАЛЕЙ | 2013 |
|
RU2541327C1 |
| УСТРОЙСТВО ДЛЯ ПОВЫШЕНИЯ ТОЧНОСТИ ТОКАРНОЙ ОБРАБОТКИ НЕКРУГЛЫХ ДЕТАЛЕЙ | 2007 |
|
RU2360779C1 |
| СЛЕДЯЩИЙ РУЛЕВОЙ ЭЛЕКТРОПРИВОД | 2024 |
|
RU2832922C1 |
| Корректирующее устройство | 1987 |
|
SU1478188A1 |
| Следящий рулевой электропривод | 2022 |
|
RU2800527C1 |
| Система автоматического управления | 1985 |
|
SU1315935A1 |
| Система автоматического регулирования | 1983 |
|
SU1083158A1 |
Изобретение относится к области электромеханики и может быть использовано для реализации циклических движений. Технический результат - повышение точности реализации циклических движений. Устройство содержит блок задания, три сумматора, датчик выходной координаты объекта регулирования, блоки задержки, фильтр и дополнительные блоки задержки, соединенные между собой так, как указано в изобретении. Все блоки задержки выполнены с параметрами, определяемыми в соответствии с временными координатами точек переходной характеристики объекта регулирования, а время задержки первого блока задержки зависит также и от времени цикла. 1 ил.
Устройство для реализации циклических движений, содержащее блок задания, выход которого соединен с первыми входами первого и второго сумматоров, вторые входы первого и второго сумматоров подключены к выходу датчика выходной координаты объекта регулирования, вход которого подключен к выходу второго сумматора, выход первого сумматора через первый вход третьего сумматора соединен со входом первого блока задержки, выход которого через последовательно соединенные второй блок задержки и фильтр подключен ко второму входу третьего сумматора и одновременно к третьему входу второго сумматора, отличающееся тем, что к выходу первого блока задержки подсоединены дополнительные блоки задержки, выходы которых подключены к соответствующим дополнительным входам второго сумматора.
| СЛЕДЯЩАЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ АПРИОРНО-НЕОПРЕДЕЛЕННЫХ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ ПО УПРАВЛЕНИЮ | 2011 |
|
RU2449337C1 |
| ДВУХКАНАЛЬНЫЙ ЭЛЕКТРОПРИВОД | 2002 |
|
RU2223592C1 |
| Система автоматического регулирования | 1987 |
|
SU1476433A1 |
| Устройство амплитудной сеточной манипуляции на управляющей сетке электронной лампы | 1982 |
|
SU1262711A1 |
| DE 10148765 A1, 17.03.2003 | |||
| JP 2004023910 A, 22.01.2004 | |||
| US2006138390 A1, 29.06.2006 | |||
| WO 2005073818 A1, 11.08.2005 | |||

