Изобретение относится к способам перемещения нагруженных элементов, грузов и может быть использовано в строительстве, машиностроении, на производственных предприятиях и в других областях промышленности для перемещения нагруженных элементов.
Широко известны способы перемещения нагруженных элементов (грузов) с использованием, например, подъемных кранов, лебедок, с использованием противовесов, в которых тяговое усилие прикладывается непосредственно к нагруженному элементу в зоне его нагруженности (линия приложения нагрузки совпадает с линией приложения усилия) или в которых направление приложения нагрузки совпадает, например, с центром вращения.
Так, например, известно вертикальное перемещение грузов (автомобилей) с использованием подъемных средств (автоподъемников), где перемещение нагруженного элемента осуществляется путем натяжения приводного троса штоком гидроцилиндра, на конце которого расположен шкив, осуществляющий натяжение троса, при этом приводной трос одним концом крепится к основанию, а другой конец закреплен на нагруженном элементе (см., например, Интернет сайт http://revolution.allbest.ru/transport/00304762_0.html, http://chertezhi.ru/modules/ukrfiles/cache/shots/Diplomn-kursovoy/Mashin-mexanizm/Podiemnie-mashini/1/kp-pla2.jpg).
Также известно перемещение груза (нагруженного элемента) с использованием подъемного крана, где подвижному элементу придают вращательное движение вокруг собственной оси путем воздействия приводным элементом на поверхность подвижного элемента по касательной к окружности с центром, лежащим на оси вращения, и приложения нагрузки к подвижному элементу в направлении, перпендикулярном оси вращения, при этом направление приложения нагрузки к подвижному элементу проходит через ось вращения подвижного элемента (см., например, http://stroy-technics.ru/gallery/mostovye-krany-jekspluatacija/image_61. gif).
Известно также перемещение груза, например, с использованием лебедки или редуктора (планетарного) (см., например, Интернет сайты http://www.know-house.ru/info_new.php?r=engineering&uid=714, http://forindustry.files.wordpress.com/2010/04/1wqeqwe.jpg. http://stroy-technics.ru/gallery/stroitelnye_krany/image_223.gif, http://forindustry.files.wordpress.com/2010/04/5wwewefewwef.jpg).
Недостатки способа с использованием известных устройств заключаются в необходимости приложения большого усилия для того, чтобы переместить тяжелый груз и элементы, находящиеся под его нагрузкой; затрачивается много энергии, сил и времени для перемещения грузов, невысокий КПД.
Техническим результатом изобретения является обеспечение возможности перемещения груза большей массы при меньшем затрачивании усилия и энергии, обеспечение экономии времени перемещения груза, повышение КПД.
Технический результат изобретения достигается благодаря способу перемещения подвижного элемента под нагрузкой по первому варианту, заключающемуся в придании подвижному элементу вращательного движения вокруг собственной оси путем воздействия вертикально перемещающимся приводным элементом на поверхность подвижного элемента по касательной к окружности с центром, лежащим на оси вращения подвижного элемента, и приложения нагрузки с помощью механизма с нагрузкой в виде груза к подвижному элементу в направлении, перпендикулярном оси вращения, при этом подвижный элемент в процессе перемещения имеет опору со стороны, диаметрально противоположной месту воздействия на него приводным элементом, отличающийся тем, что направление приложения нагрузки к подвижному элементу смещено относительно оси вращения в сторону от места воздействия приводным элементом таким образом, что подвижный элемент при перемещении толкает механизм с нагрузкой в вертикальном направлении.
Технический результат изобретения также достигается благодаря способу перемещения подвижного элемента под нагрузкой по второму варианту, заключающемуся в придании подвижному элементу вращательного движения вокруг собственной оси путем воздействия приводным элементом в виде центральной шестерни на поверхность подвижного элемента в виде сателлита по касательной к окружности с центром, лежащим на оси вращения подвижного элемента, и приложения нагрузки к подвижному элементу с помощью по меньшей мере одного колеса, связанного посредством водила с выходной шестерней, в направлении, перпендикулярном оси вращения, при этом подвижный элемент в процессе перемещения имеет опору в виде внешней неподвижной шестерни со стороны, диаметрально противоположной месту воздействия на него приводным элементом, отличающийся тем, что направление приложения нагрузки к подвижному элементу смещено относительно оси вращения в сторону от места воздействия приводным элементом таким образом, что подвижный элемент при перемещении толкает по меньшей мере одно колесо и связанное с ним водило.
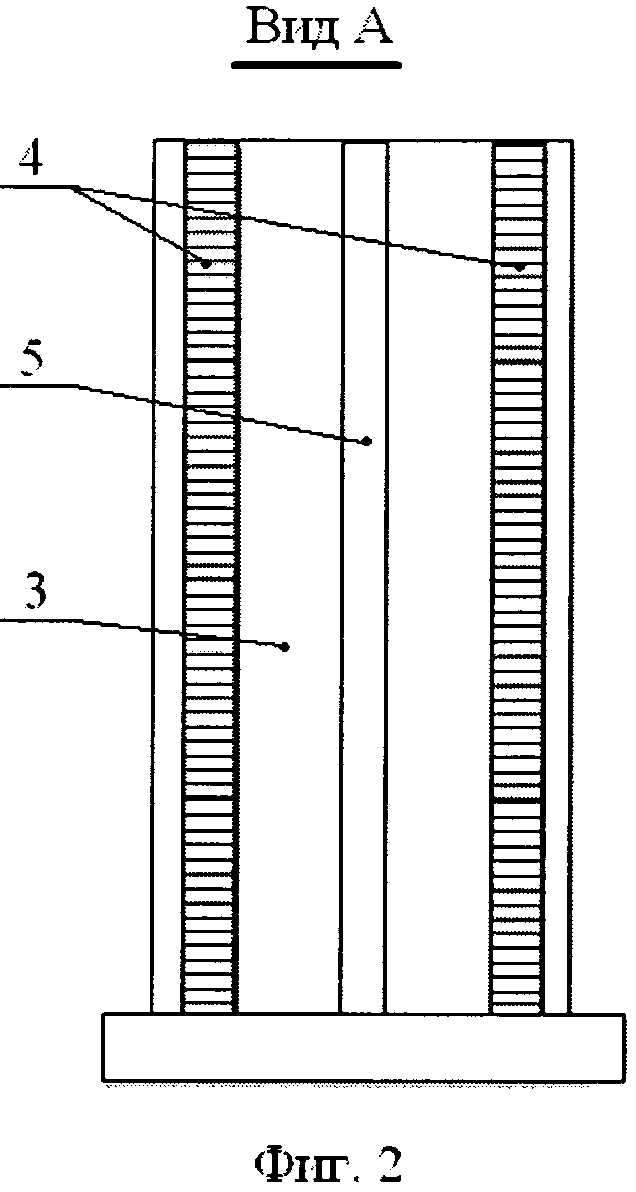
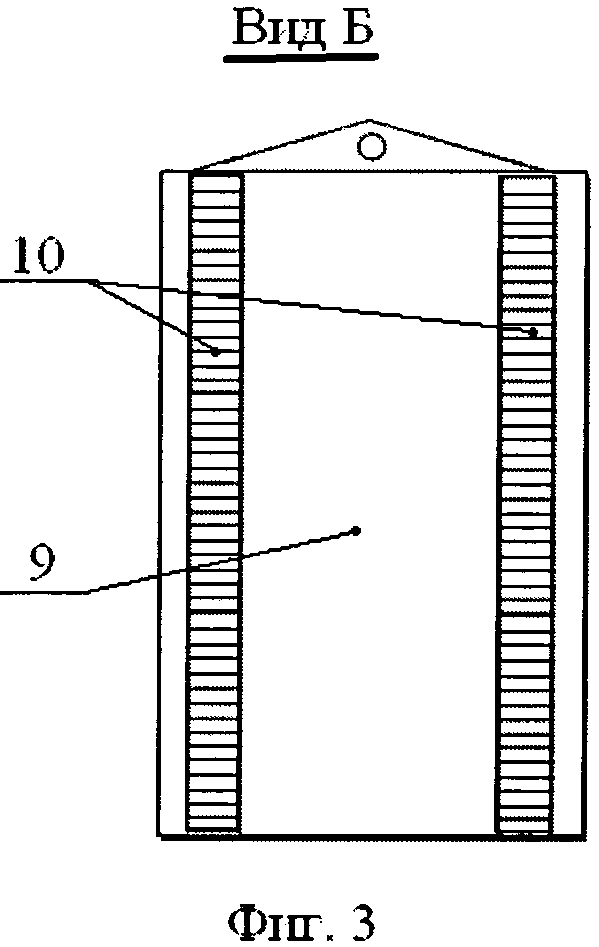
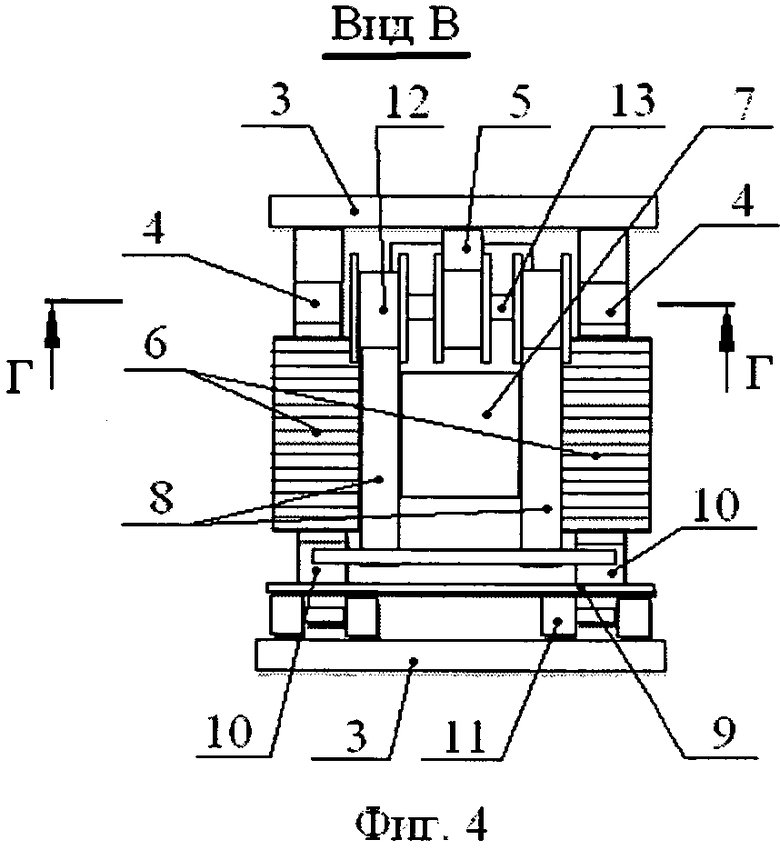
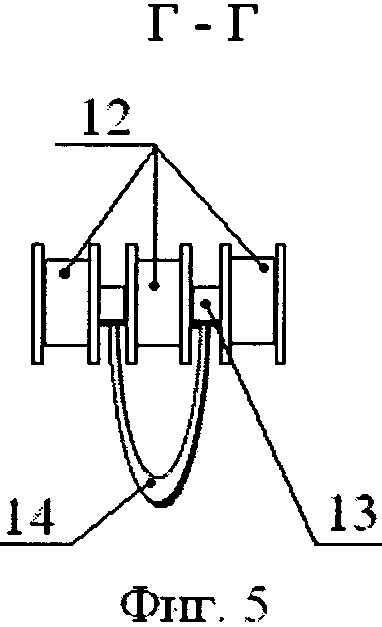
Изобретение реализуется с помощью устройств, изображенных на чертежах, где на фиг.1 показан общий вид подъемного устройства для осуществления способа по первому варианту; на фиг.2 - вид А на фиг.1 (неподвижная часть устройства); на фиг.3 - вид Б на фиг.1 (подвижная часть устройства); на фиг.4 - вид В на фиг.1; на фиг.5 - разрез Г-Г на фиг.4 (нагруженный механизм); на фиг.6 показан планетарный редуктор, используемый для реализации способа по второму варианту; на фиг.7 - частичный вид Д на фиг.5.
Способ перемещения подвижного элемента 1, находящегося под нагрузкой, заключается в придании подвижному элементу 1 вращательного движения вокруг собственной оси путем воздействия вертикально перемещающимся приводным элементом 2 на поверхность подвижного элемента 1 по касательной к окружности с центром, лежащим на оси вращения подвижного элемента 1, и приложения нагрузки с помощью механизма с нагрузкой в виде груза 21 к подвижному элементу 1 в направлении, перпендикулярном оси вращения. Подвижный элемент 1 в процессе перемещения имеет опору 5 со стороны, диаметрально противоположной месту воздействия на него приводным элементом 2. Направление приложения нагрузки к подвижному элементу 1 смещено относительно оси вращения в сторону от места воздействия приводным элементом 2 таким образом, что подвижный элемент 1 при перемещении толкает механизм с нагрузкой в вертикальном направлении вверх.
Осуществление способа возможно, например, с помощью подъемного устройства (фиг.1-4), включающего: корпус 3, имеющий перевернутую П-образную форму, на одной из стенок которого вдоль боковых краев закреплены вертикальные зубчатые рейки 4, а между ними, преимущественно в центральной части данной стенки корпуса 3, закреплена продольная направляющая опорная рейка 5; подвижный элемент 1, выполненный в виде двух прямозубых колес 6, связанных между собой осью 7 и на обращенных друг к другу поверхностях которых выполнены опорные диски 8, диаметр которых больше диаметра окружности, охватывающей концы зубцов колес 6; приводной элемент 2 в виде плоского щита 9, на поверхности которого, обращенной к подвижному элементу 1, вдоль боковых краев закреплены вертикальные зубчатые рейки 10, отстоящие друг от друга на расстоянии, равном расстоянию между зубчатыми рейками 4, при этом приводной элемент 2 опирается на другую стенку корпуса 3 через ролики 11; независимо вращающиеся друг от друга колеса 12, установленные на одной оси 13 и расположенные над подвижным элементом 1, при этом два крайних колеса 12 опираются на соответствующие опорные диски 8, а третье - среднее - опирается на продольную рейку 5, причем на одной оси с колесами 12 шарнирно закреплен держатель 14 груза 21.
Способ перемещения по первому варианту с помощью подъемного устройства (фиг.1-5) осуществляется следующим образом.
Подвижный элемент 1 находится в зажатом состоянии между неподвижными и подвижными зубчатыми рейками 4 и 10. Внешним усилием воздействуют на приводной элемент 2 (щит 9 с зубчатыми рейками 10), который вертикально перемещается по одной из стенок корпуса 3, опираясь на ролики 11. Щит 9 зубчатыми рейками 10 воздействует на прямозубые колеса 6, толкая их зубцы, придавая колесам 6 вращательное движение вокруг собственной оси. Вращаясь вокруг собственной оси, находя точку опоры в каждом положении на неподвижных зубчатых рейках 4, прямозубые колеса 6 перемещаются по неподвижным зубчатым рейкам 4 корпуса 3, при этом блок (подвижный элемент 1) совершает вертикальное перемещение. Перемещаясь по рейкам 4, подвижный элемент 1 толкает механизм с нагрузкой, который ложится колесами 12 между неподвижной рейкой 5 и опорными дисками 8. Наклон опорных дисков 8 заставляет среднее колесо 12 прижиматься к опорной рейке 5, находя в ней опору. Груз 21 на держателе 14 механизма с нагрузкой висит в пространстве между опорными дисками 8. Механизм с нагрузкой упирается в три точки - по одной точке на каждый опорный диск 8 и одна на опорной рейке 5. Разнонаправленное вращение колес 12 оси 13 не мешает движению подвижного элемента 1. Канавки на колесах 12 придают устойчивость механизму с нагрузкой.
Крайние колеса 12 и среднее колесо 12, обкатывая соответственно цилиндрическую поверхность опорных дисков 8 и опорную рейку 5, перемещаются на одной оси 13 поступательно (вертикально) вместе с держателем 14 груза 21, который удерживает перемещаемый груз 21.
Механизм с нагрузкой (колеса 12 с осью 13 и держателем 14 груза) не поднимается относительно диаметра опорных дисков 8, угол, в котором он находится - постоянный, при движении подвижного элемента 1 он не меняется. Из «угла» он не выдавливается, он движется вертикально, как и любая точка на блоке (подвижном элементе 1), в том числе и «традиционная» в центре блока.
Направление приложения нагрузки смещено относительно оси вращения подвижного элемента 1 в сторону от приводного элемента 2, ближе к точкам опоры - зубчатым рейкам 4 корпуса 3, образуя рычаг II рода, поскольку нагрузка расположена между точкой опоры и усилием, прикладываемым к прямозубым колесам 6 приводным элементом 2. Нагрузку подвижному элементу 1 прикладывают, преимущественно, в месте, диаметрально противоположном месту приложения усилия. Место нагрузки можно располагать в любом месте, кроме оси вращения подвижного элемента 1. Изменение места нагрузки будет приводить к увеличению или уменьшению плеча нагрузки, что будет приводить к увеличению или уменьшению выигрыша в силе. Это достигается за счет того, что диаметр опорных дисков 8 и высота опорной рейки 5 может меняться при неизменном диаметре прямозубых колес 6. В случае необходимости место приложения нагрузки может быть смещено дальше точки опоры колеса 6 на неподвижных зубчатых рейках 4 в сторону от места приложения усилия, образуя рычаг I рода.
С помощью подбора высоты неподвижной рейки 4, высоты опорных дисков 8 и диаметра колес 12 выбирается место, где необходимо разместить ось с нагрузкой 13. Высота подвижных и неподвижных реек 4 и 10, а также прямозубые колеса 6 выполнены регулируемыми по размеру.
Гладкие поверхности опорных дисков 8, опорной рейки 5 и колес 12 могут быть выполнены с зубьями. Количество колес 12 механизма с нагрузкой, опорных дисков 8 и опорных реек 5 может быть другим.
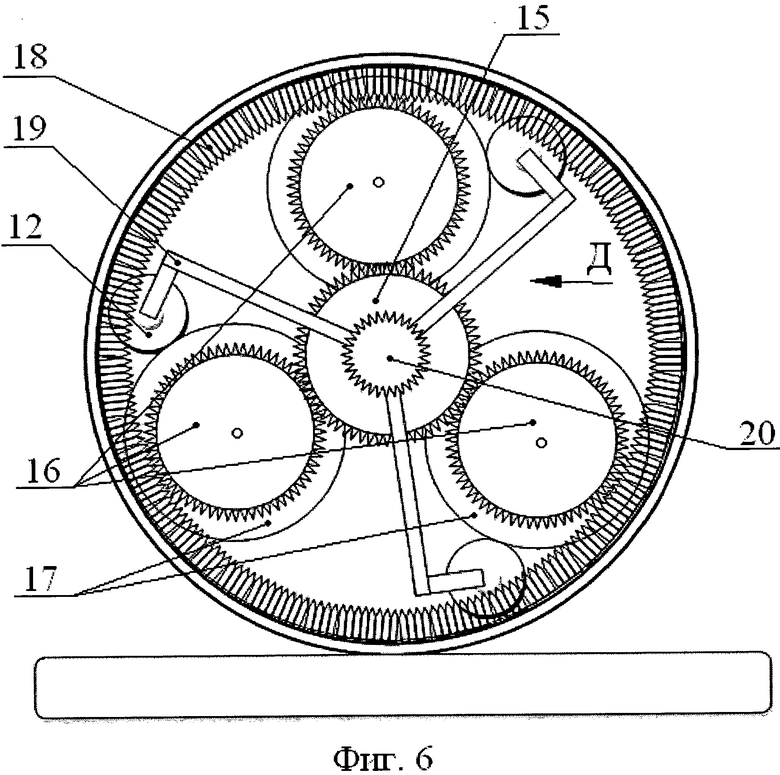
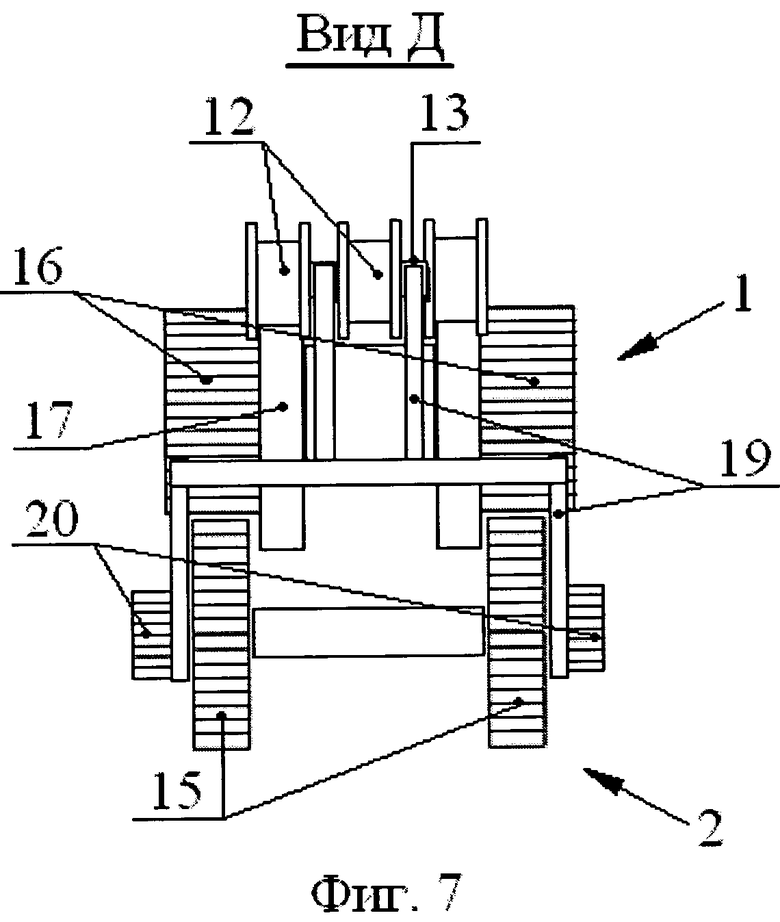
Способ перемещения подвижного элемента под нагрузкой по второму варианту (фиг.6, 7) заключается в придании подвижному элементу вращательного движения вокруг собственной оси путем воздействия приводным элементом 2 в виде центральной шестерни 15 на поверхность подвижного элемента в виде сателлита 16 по касательной к окружности с центром, лежащим на оси вращения подвижного элемента, и приложения нагрузки к подвижному элементу с помощью по меньшей мере одного колеса 12, связанного посредством водила с выходной шестерней 20, в направлении, перпендикулярном оси вращения. Подвижный элемент в процессе перемещения имеет опору в виде внешней неподвижной шестерни 18 со стороны, диаметрально противоположной месту воздействия на него приводным элементом. Направление приложения нагрузки к подвижному элементу смещено относительно оси его вращения в сторону от места воздействия приводным элементом таким образом, что подвижный элемент (сателлит 16) при перемещении толкает по меньшей мере одно колесо 12 и связанное с ним водило.
Способ по второму варианту осуществляется с помощью планетарного механизма (редуктора), включающего: приводной элемент 2 в виде центральной (солнечной) спаренной шестерни 15; подвижные элементы 1 в виде парных сателлитов 16, взаимодействующих с центральной шестерней, снабженных на обращенных друг к другу плоских поверхностях опорными дисками 17; внешнюю неподвижную шестерню 18, по которой перемещаются сателлиты 16; колеса 12, два из которых - крайние - опираются на опорные диски 17, обкатывая их цилиндрические поверхности в процессе движения, а среднее колесо 12 опирается на кольцевую направляющую рейку (не показана), при этом ось 13, на которой установлены колеса 12, связана посредством рычагов 19 с выходной шестерней 20. Колеса 12 расположены по ходу движения сателлитов 16.
Способ перемещения с помощью планетарного редуктора (фиг.6, 7) осуществляется следующим образом.
Центральная шестерня 15 (приводной элемент 2) получает движение извне, начинает вращаться, передавая крутящий момент на сателлиты 16 (подвижные элементы 1). Сателлиты 16, находя точку опоры на неподвижной внешней шестерне 18, толкают опорными дисками 17 независимые колеса 12 с общей осью 13. Колеса 12, обкатывая соответственно опорные диски 17 и направляющую кольцевую рейку в подъемном устройстве опорная рейка 5 (не показана), толкают связанное с ними водило, выполненное из системы взаимосвязанных рычагов 19, одна часть которых соединена с колесами 12, а другая часть соединена с выходной шестерней 20, предназначенной для передачи крутящего момента вовне. В данном случае сокращен рычаг нагрузки, который находится ближе к точке опоры, благодаря чему увеличилась сила. Осуществление способа с помощью данного планетарного редуктора, работающего по принципу работы вышеописанного подъемного устройства, также позволяет сократить усилие, прикладываемое для вращения выходной шестерни, связанной с нагрузкой.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ перемещения подвижного элемента под нагрузкой (варианты) | 2023 |
|
RU2808284C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ | 2010 |
|
RU2442711C1 |
| ПЛАНЕТАРНЫЙ МЕХАНИЗМ ПАРУСНОЙ УСТАНОВКИ | 2011 |
|
RU2481497C2 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |
| Принудительно блокируемый конический дифференциал транспортного средства | 2020 |
|
RU2731829C1 |
| УСТРОЙСТВО ДЛЯ МЕХАНИЧЕСКОЙ ЗАЧИСТКИ ПОВЕРХНОСТЕЙ | 1991 |
|
RU2024334C1 |
| Стенд для испытаний колесных пар рельсовых транспортных средств | 1985 |
|
SU1245919A1 |
| САМОКАТ-ЭКИПАЖ | 2002 |
|
RU2228279C2 |
| Многопоточный двухступенчатый редуктор опорно-трансмиссионного узла ветроэнергетической установки | 1989 |
|
SU1796044A3 |
| Мост ведущий управляемый комбинированный | 2023 |
|
RU2816386C1 |
Изобретение относится к способу перемещения нагруженных элементов, грузов и может быть использовано в строительстве, машиностроении и в других областях промышленности для перемещения нагруженных элементов. Способ перемещения подвижного элемента под нагрузкой по первому варианту заключается в придании подвижному элементу вращательного движения вокруг собственной оси путем воздействия вертикально перемещающимся приводным элементом на поверхность подвижного элемента по касательной к окружности с центром, лежащим на оси вращения подвижного элемента, и приложения нагрузки с помощью механизма с нагрузкой в виде груза к подвижному элементу в направлении, перпендикулярном оси вращения. Подвижный элемент в процессе перемещения имеет опору со стороны, диаметрально противоположной месту воздействия на него приводным элементом. Направление приложения нагрузки к подвижному элементу смещено относительно оси вращения в сторону от места воздействия приводным элементом таким образом, что подвижный элемент при перемещении толкает механизм с нагрузкой в вертикальном направлении. Способ по второму варианту осуществляется с помощью планетарного механизма. Техническим результатом изобретения является обеспечение возможности перемещения груза большей массы при меньшем затрачивании усилия и энергии, обеспечение экономии времени перемещения груза, повышение КПД. 2 н.п. ф-лы, 7 ил.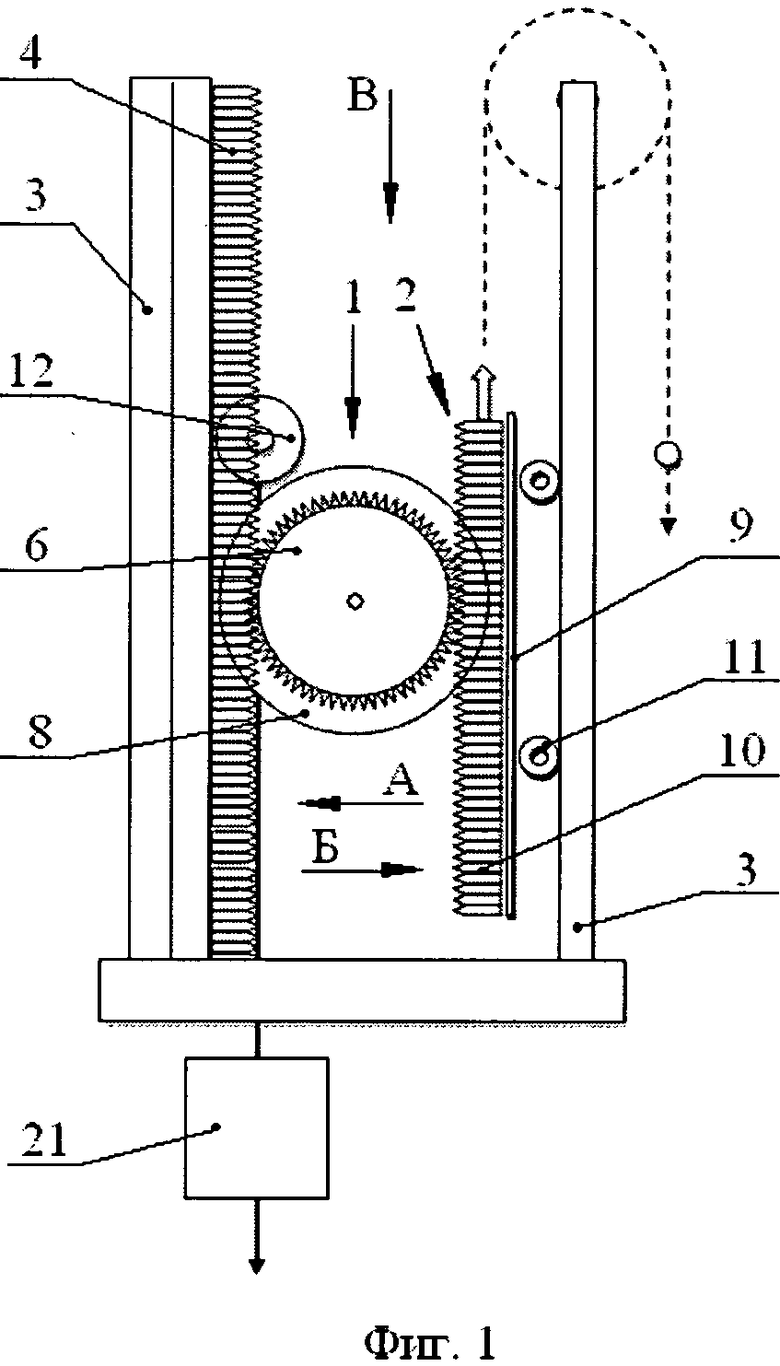
1. Способ перемещения подвижного элемента под нагрузкой путем придания подвижному элементу вращательного движения вокруг собственной оси путем воздействия вертикально перемещающимся приводным элементом на поверхность подвижного элемента по касательной к окружности с центром, лежащим на оси вращения подвижного элемента, и приложения нагрузки с помощью механизма с нагрузкой в виде груза к подвижному элементу в направлении, перпендикулярном оси вращения, при этом подвижный элемент в процессе перемещения имеет опору со стороны, диаметрально противоположной месту воздействия на него приводным элементом, отличающийся тем, что направление приложения нагрузки к подвижному элементу смещено относительно оси вращения в сторону от места воздействия приводным элементом таким образом, что подвижный элемент при перемещении толкает механизм с нагрузкой в вертикальном направлении.
2. Способ перемещения подвижного элемента под нагрузкой путем придания подвижному элементу вращательного движения вокруг собственной оси путем воздействия приводным элементом в виде центральной шестерни на поверхность подвижного элемента в виде сателлита по касательной к окружности с центром, лежащим на оси вращения подвижного элемента, и приложения нагрузки к подвижному элементу с помощью по меньшей мере одного колеса, связанного посредством водила с выходной шестерней, в направлении, перпендикулярном оси вращения, при этом подвижный элемент в процессе перемещения имеет опору в виде внешней неподвижной шестерни со стороны, диаметрально противоположной месту воздействия на него приводным элементом, отличающийся тем, что направление приложения нагрузки к подвижному элементу смещено относительно оси вращения в сторону от места воздействия приводным элементом таким образом, что подвижный элемент при перемещении толкает по меньшей мере одно колесо и связанное с ним водило.
| Фрикционная планетарная передача | 1948 |
|
SU79383A1 |
| Фрикционная планетарная передача | 1989 |
|
SU1626024A1 |
| АРМАТУРНЫЙ КАРКАС ДЛЯ МНОГОПРОЛЕТНЫХ ЖЕЛЕЗОБЕТОННЫХ БАЛОК | 2016 |
|
RU2637668C1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Планетарная передача | 1980 |
|
SU950983A1 |
| DE 19616008 С1, 19 | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство шагового перемещения | 1989 |
|
SU1744345A1 |
| JP S 62288768 A1, 15 12.1987 | |||

