ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к системе передачи промышленного робота для передачи движения к части робота и к промышленному роботу, содержащему такую систему. Изобретение также относится к способу для предотвращения повреждения смазки из-за поглощения влаги внутри промышленного робота, используемого в среде с высокой влажностью, и дополнительно к способу для поглощения влаги внутри коробки передач, содержащей смазку, в промышленном роботе.
УРОВЕНЬ ТЕХНИКИ
Наружные применения являются относительно новой областью использования для промышленных роботов. Во время наружного применения роботов во влажных условиях было обнаружено, что смазка, используемая, например, в коробке передач робота, по истечении некоторого времени показывает содержание влаги, которое выше, чем нормальное, из-за влаги из окружающей среды, проникающей в коробку передач. Это является недостатком, поскольку это могло бы привести к менее хорошему смазыванию, увеличившемуся износу деталей машин, которые нуждаются в смазывании, более короткому сроку службы и, следовательно, более высоким расходам. Чтобы избежать этого, смазка должна проверяться и заменяться на более коротких промежутках времени, что также увеличит расходы. Альтернативно используемая смазка должна быть смазкой, которая способна выдерживать более высокую влажность в окружающей среде без отрицательных эффектов на свою смазывающую функцию и возможности. Другой возможной альтернативой могло бы быть изготовление коробки передач, намного более плотной, если возможно. Все эти альтернативы связаны с увеличением расходов.
Существует также проблема, созданная повышенным влагосодержанием в коробке передач, когда влага не поглощается смазкой, но присутствует в виде свободной воды, растворенной или превращенной в эмульсию смазкой, которая в той же или большей степени пагубна для функции смазки.
Промышленные роботы также могут использоваться в других средах, где влажность высока, например, в литейном цехе или в средах с промыванием, таких как в пищевой промышленности. Подобная проблема с повышенным влагосодержанием в смазках также может возникнуть в таких применениях.
Проблема со смазками, поглощающими влагу, также может возникнуть из-за колебаний температуры, что приводит к разнице температур между внешней средой и внутренностями коробки передач, и это, в свою очередь, приводит к разнице давлений между внешней средой и внутренностями коробки передач, что может привести к увеличению влаги в коробке передач, когда влажный воздух всасывается в коробку передач вследствие более низкого внутреннего давления. Например, это может быть, когда робот работает в две или три смены, и дневная температура может быть существенно выше, чем ночная температура. Эти колебания температуры в сочетании с влажной средой являются особенно сложной проблемой.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Цель настоящего изобретения состоит в том, чтобы предоставить решение проблем, связанных со слишком высоким влагосодержанием в смазках, используемых в промышленных роботах, и, тем самым, расширить возможность использования промышленных роботов в средах с высокой влажностью. Цель также состоит в том, чтобы сделать это возможным простым и недорогим способом.
Эти цели достигнуты отличительными особенностями, определенными в прилагаемой патентной формуле изобретения.
Согласно первому аспекту настоящего изобретения определена система передачи промышленного робота для передачи движения к частям робота, содержащая, по меньшей мере, один двигатель и, по меньшей мере, одну коробку передач, содержащую смазку, отличающаяся тем, что коробка передач снабжена интегрированным поглощающим влагу устройством, содержащим поглощающее влагу вещество, приспособленным для поглощения влаги, содержащейся в коробке передач. Путем снабжения коробки передач интегрированным поглощающим влагу устройством влага в коробке передач будет поглощаться поглощающим влагу устройством вместо того, чтобы поглощаться, растворяться или превращаться в эмульсию смазкой, и поглощающее влагу устройство может также поглощать воду из смазки. Это определяется тем, что поглощающее влагу устройство содержит поглощающее влагу вещество с более высоким сходством с водой, чем сходство смазки с водой.
Предполагается, что смазка может вступить в контакт с поглощающим влагу веществом, и в этом случае поглощающее влагу вещество может поглотить смазку вместо воды или влаги и стать насыщенным смазкой, и в этом случае оно будет неспособно поглощать влагу. Это может быть предотвращено поглощающим влагу устройством, содержащим поглощающее влагу вещество с более высоким сходством с водой, чем со смазкой.
Во многих применениях будет желательно, чтобы сходство поглощающего влагу вещества с водой было таким, что поглощающее вещество будет как впитывать влагу в газообразном состоянии изнутри коробки передач и воду, присутствующую в виде свободной воды, растворенной, поглощенной или превращенной в эмульсию смазкой, так и предохранять смазку от поглощения поглощающим влагу веществом.
Сходство должно истолковываться включением как химического сходства, так и физического сходства или их комбинацией.
Интегрирование устройства в состав коробки передач предоставляет простые и недорогие средства для поглощения влаги и, таким образом, продления промежутка времени между заменами смазки, уменьшая риск повреждения частей в коробке передач вследствие пониженной смазывающей функции смазки, что, в свою очередь, происходит вследствие избыточного количества влаги, поглощенной смазкой.
Под выражением «интегрированное» имеется в виду устройство, которое может оставаться установленным в коробке передач все время, включая время работы коробки передач. Не будет необходимости в каких-либо внешних устройствах, которые необходимо присоединять и отсоединять.
Согласно одному отличительному признаку, поглощающее влагу устройство может быть съемным. Благодаря этому устройство может быть заменено всегда, когда требуется, и заменено новым устройством.
Поглощающее влагу устройство может быть интегрировано в коробку передач посредством предоставления в виде части пробки, расположенной в отверстии в стенке коробки передач. Поглощающее влагу устройство со своим поглощающим веществом может быть расположено несколькими способами. Например, оно может быть предоставлено, главным образом, снаружи коробки передач, и влага будет поглощаться через отверстие в пробке, предоставляя связь между внутренностями коробки передач и поглощающим влагу веществом устройства. В качестве альтернативы поглощающее влагу устройство может быть предоставлено, главным образом, внутри коробки передач, будучи присоединенным к пробке, и в этом случае поглощающее влагу вещество внутри коробки передач может быть, при необходимости, окружено пропускающей жидкость оболочкой или пленкой, или тому подобным. Согласно другой альтернативе, поглощающее влагу вещество может содержаться в пробке.
Согласно другому варианту осуществления, коробка передач снабжена, по меньшей мере, одним маслозаливным отверстием для заливки или слива смазки из коробки передач, и поглощающее влагу устройство интегрировано в пробку маслозаливного отверстия, спроектированную с возможностью вставки в маслозаливное отверстие. Если обычное маслозаливное отверстие коробки передач может использоваться для пробки с интегрированным поглощающим влагу устройством, это предоставляет очень простое и экономичное решение, поскольку не будет требоваться отдельное отверстие для поглощающего влагу устройства.
Также будет удобно иметь некоторую меру предосторожности по отношению к поглощающему влагу устройству, которая обеспечит индикацию того, может ли еще устройство поглощать влагу, или оно уже израсходовало свою способность поглощать влагу и должно быть заменено. Для этого поглощающее влагу устройство может содержать поглощающее влагу вещество, имеющее физическое свойство, которое приспособлено к изменению в зависимости от количества поглощенной влаги. Примерами таких физических свойств могут быть цвет, объем, электрическое сопротивление и т.д.
Согласно другой альтернативе, поглощающее влагу устройство может содержать сенсорное устройство, приспособленное для испускания сигнала, отражающего состояние поглощенной влаги в поглощающем влагу устройстве, в устройство отображения, которое отображает состояние поглощенной влаги.
Согласно дополнительной альтернативе, поглощающее влагу устройство может содержать сенсорное устройство, приспособленное для испускания сигнала, отражающего состояние поглощенной влаги в поглощающем влагу устройстве, в систему управления. Эта система управления может быть устройством управления роботом, программируемым логическим контроллером (ПЛК, PLC), службой дистанционного доступа, устройством дистанционного управления или любым другим типом системы управления или устройством, обычно используемым в связи с промышленными роботами.
Согласно другому аспекту изобретения, определен промышленный робот, содержащий систему передачи с интегрированным поглощающим влагу устройством, имеющим вышеперечисленные отличительные признаки.
Согласно еще одному аспекту изобретения, определен способ для предотвращения повреждения смазки вследствие поглощения влаги внутри промышленного робота, используемого в среде с высокой влажностью, отличающийся интегрированием поглощающего влагу устройства, содержащего поглощающее влагу вещество, в часть робота, содержащую смазку. Вследствие интегрирования поглощающего влагу вещества в часть робота, содержащую смазку, влага будет поглощаться поглощающим влагу устройством вместо того, чтобы поглощаться смазкой, и влага, уже поглощенная смазкой, может быть сокращена, как уже было обсуждено выше. В результате предотвращается повреждение смазки из-за избыточного влагосодержания, и продлевается срок службы смазки. Это может быть достигнуто посредством выбора поглощающего влагу вещества с большим сходством с водой, чем сходство смазки с водой.
Также может быть предотвращено то, что поглощающее влагу вещество будет поглощать смазку, как было также объяснено выше, посредством выбора поглощающего влагу вещества с большим сходством с водой, чем со смазкой.
Согласно другому отличительному признаку, способ может отличаться выбором поглощающего влагу вещества, имеющего физическое свойство, которое приспособлено к изменению в зависимости от количества поглощенной влаги. Примерами таких физических свойств могут быть цвет, объем, электрическое сопротивление и т.д.
Согласно дополнительному отличительному признаку, способ может отличаться интегрированием поглощающего влагу устройства в часть пробки, расположенную в отверстии в стенке коробки передач, содержащей смазку, и которая является частью системы передачи для передачи движения к части робота.
Согласно другому отличительному признаку, способ может быть определен интегрированием поглощающего влагу устройства в маслозаливную пробку коробки передач. Преимущества, связанные с этим, были описаны выше.
В заключение и согласно дополнительному аспекту настоящего изобретения, определен способ для поглощения влаги внутри коробки передач, содержащей смазку, в промышленном роботе, отличающийся интегрированием поглощающего влагу устройства, содержащего поглощающее влагу вещество, в коробку передач.
Другие отличительные признаки и преимущества изобретения могут быть очевидными из прилагаемой формулы изобретения и последующего подробного описания вариантов осуществления.
Должно быть упомянуто, что термин «смазка» предназначен для охвата любого типа смазки, которая может использоваться в промышленном роботе и, в частности, в коробке передач, например жидких или твердых смазок любого типа.
Должно быть также упомянуто, что под влагой подразумевается жидкая влага, такая как вода в газообразной или жидкой форме, включая такую влагу, которая может содержаться в других газах, жидкостях или твердых веществах.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Изобретение далее будет описано более подробно со ссылкой на прилагаемые схематические изображения, иллюстрирующие различные аспекты и варианты осуществления изобретения, приведенные только в качестве примеров, и на которых:
фиг.1 схематически иллюстрирует промышленного робота,
фиг.2 показывает части промышленного робота, содержащего систему передачи согласно настоящему изобретению и включающего в себя поглощающее влагу устройство,
фиг.3 показывает первый вариант осуществления поглощающего влагу устройства согласно настоящему изобретению,
фиг.4 показывает второй вариант осуществления поглощающего влагу устройства согласно настоящему изобретению,
фиг.5 показывает третий вариант осуществления поглощающего влагу устройства согласно настоящему изобретению, и
фиг.6 показывает четвертый вариант осуществления поглощающего влагу устройства согласно настоящему изобретению.
На чертежах одинаковым элементам или соответствующим элементам в разных вариантах осуществления были даны одни и те же номера ссылок.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
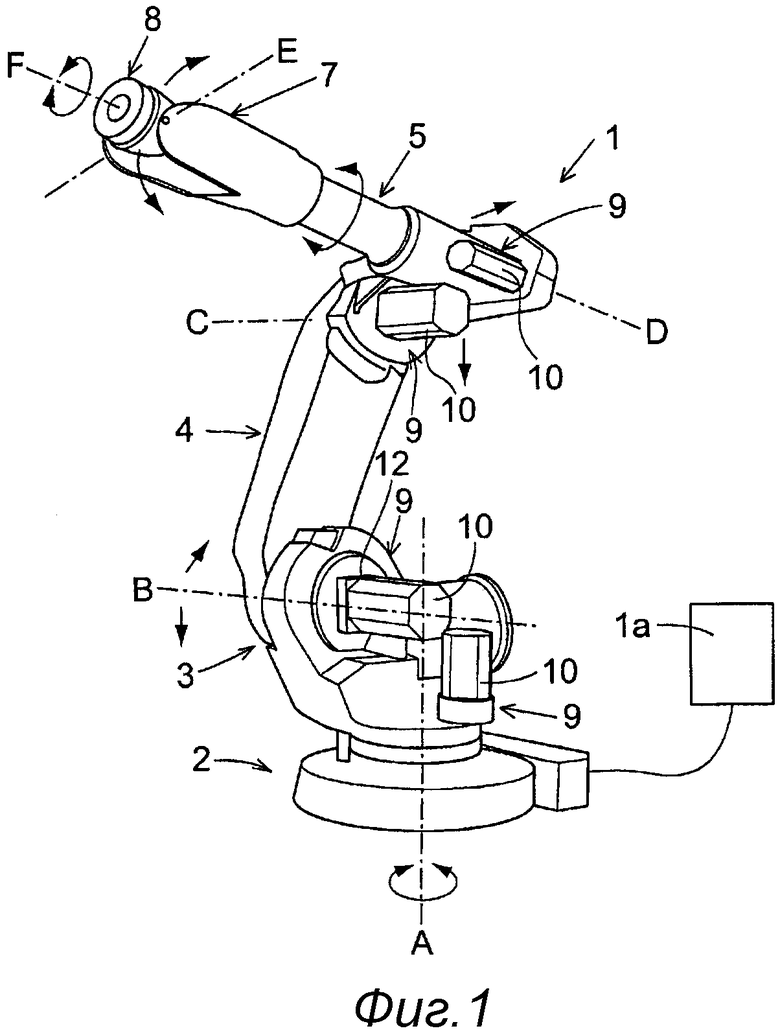
На фиг.1 схематически показан промышленный робот. Промышленный робот 1 содержит систему управления, манипулятор и электрические силовые установки, выполненные с возможностью выполнять движения манипулятора. Каждая силовая установка содержит электрический двигатель, тормоз, коробку передач и другие механизмы привода, необходимые для формирования системы передачи для передачи движения к подвижной части робота.
Изображенный робот является традиционным шестиосным промышленным роботом 1. Однако очевидно, что изобретение не ограничено таким роботом, но может также использоваться в роботах с большим или меньшим числом осей и для других типов кинематических решений, таких как параллельные кинематические роботы или роботы SCARA (роботы с избирательной податливостью руки).
Изображенный робот имеет стойку 3, которая установлена с возможностью вращения на основание 2 вокруг первой оси вращения A. На стойке 3 первая рука 4 робота опирается с возможностью вращения для вращения вокруг второй оси вращения B. Промышленный робот дополнительно содержит вторую руку 5 робота, которая опирается с возможностью вращения на наружный конец первой руки робота для вращения вокруг третьей оси вращения С. Вторая рука робота также может вращаться вокруг четвертой оси вращения D, которая совпадает с продольной осью второй руки 5 робота. Блок 6 цапфы расположен на наружном конце второй руки 5 робота, и упомянутый блок цапфы содержит наклонную часть 7, которая опирается с возможностью вращения на блок 6 цапфы для вращения вокруг пятой оси вращения E. Поворотный диск 8, на котором может быть установлено захватное устройство или инструмент, расположен на наклонной части для вращения вокруг шестой оси вращения F. Манипулятор соединен с системой 1a управления.
Чтобы привести соединенные части во вращение вокруг соответствующих осей A, B, C, D, E, F, предоставлена система 9 передачи для каждой подвижной части робота, некоторые из двигателей 10 которых могут быть видны на фиг.1.
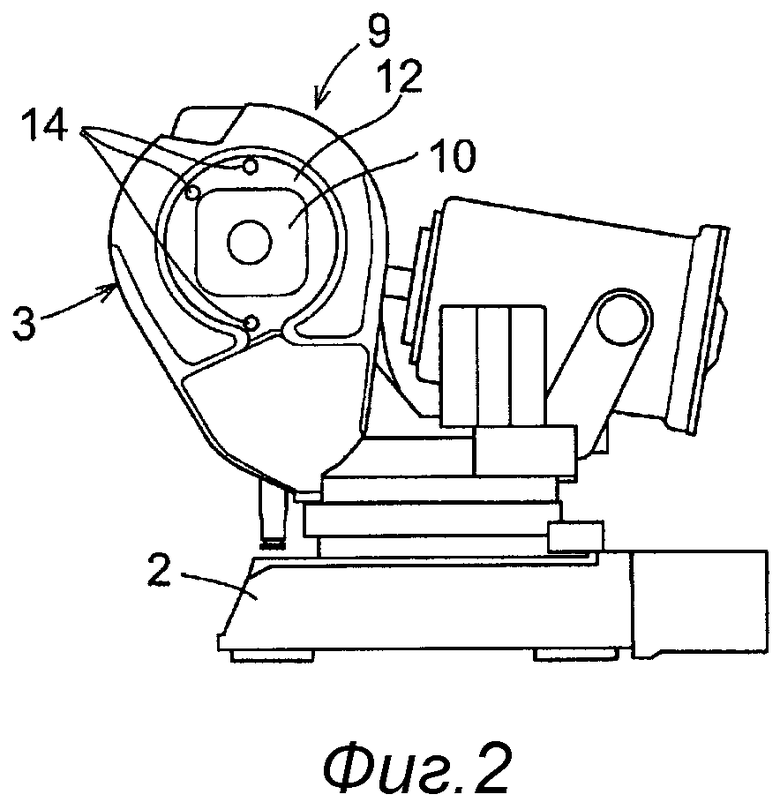
Фиг.2 иллюстрирует части промышленного робота, снабженного системой 9 передачи согласно настоящему изобретению. Частями робота являются основание 2 и стойка 3, и на стойке расположена коробка 12 передач, соединенная с электрическим двигателем 10. Система передачи, содержащая электрический двигатель 10 и коробку 12 передач, передает вращательное движение к первой руке 4 робота вокруг оси вращения B, как видно на фиг.1. Коробка передач заполнена смазкой, в большинстве случаев маслом.
Коробка 12 передач в большинстве случаев снабжена тремя отверстиями в стенке 13 коробки передач, в которую вставлены так называемые маслозаливные пробки. Одна маслозаливная пробка и отверстие предназначены для контроля, одна маслозаливная пробка и отверстие предназначены для заливки масла или другой смазки в коробку передач, и одна маслозаливная пробка и отверстие предназначены для слива масла из коробки передач. Эти отверстия могут использоваться для установки поглощающего влагу устройства согласно настоящему изобретению. Альтернативно, отдельное отверстие может быть сделано в стенке коробки передач для установки поглощающего влагу устройства согласно настоящему изобретению. Всем из этих возможных отверстий, которые могут использоваться для поглощающего влагу устройства, был дан номер 14 ссылки, вне зависимости от того, являются ли они уже существующими отверстиями или отдельными отверстиями, сделанными для этой конкретной цели. Однако в большинстве случаев предпочтительно, чтобы отверстие было расположено под нормальной поверхностью смазки.
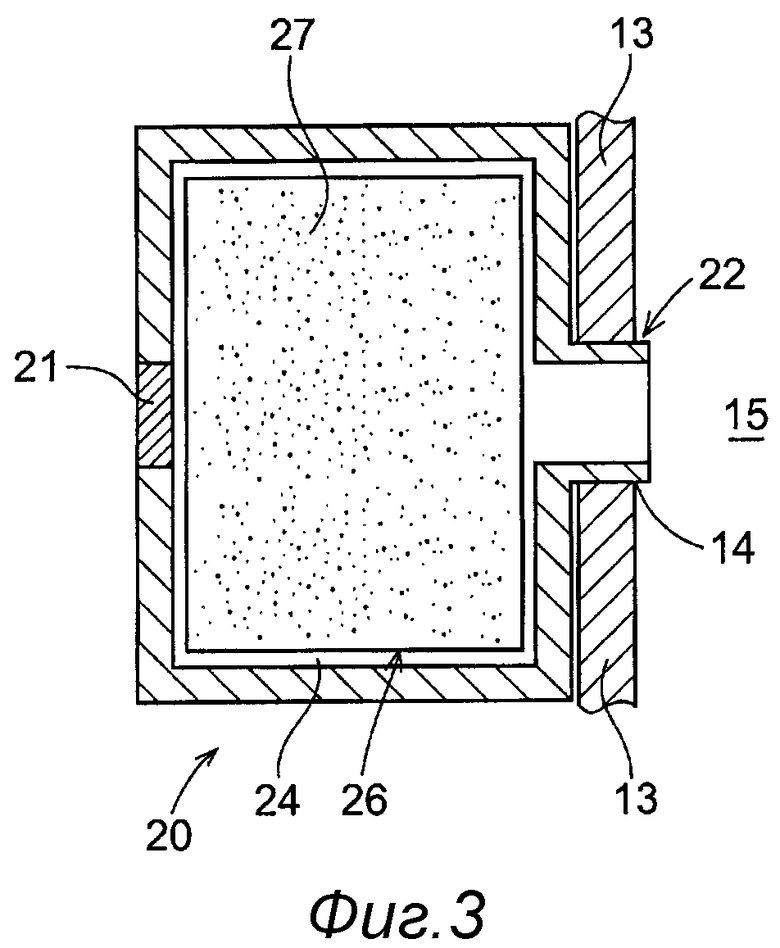
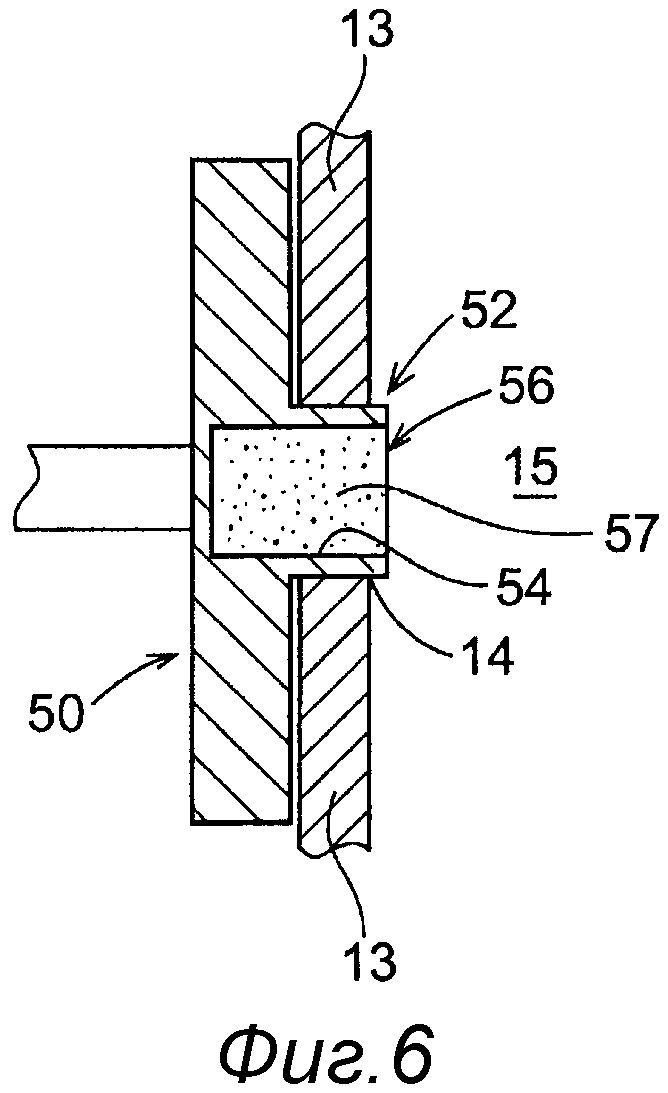
В следующих примерах вариантов осуществления, изображенных на фиг.3-6, внутренности коробки передач обозначены 15, и стенка коробки передач обозначена 14.
Первый вариант осуществления поглощающего влагу устройства 20 показан на фиг.3. Отверстие 14 предоставлено в стенке 13 коробки передач, и в это отверстие вставлена пробка 22, тем самым затыкая отверстие. Пробка спроектирована с частью, содержащей поглощающее влагу устройство 20, которое таким образом интегрировано в коробку передач. Часть пробки, содержащая поглощающее влагу устройство, расположена снаружи коробки передач. Поглощающее влагу устройство содержит полую часть 24 во внутренностях пробки, при этом полая часть расположена снаружи коробки передач, когда пробка вставлена в отверстие 14. В этой полой части 24 расположено поглощающее влагу тело 26 из поглощающего влагу вещества 27. Поскольку также часть пробки, которая выступает наружу из отверстия 14, является полой, существует свободная связь между внутренностями 15 коробки передач и внутренностями пробки с поглощающим влагу веществом 27, и поглощающее влагу вещество может, следовательно, поглощать влагу, содержащуюся внутри коробки передач.
Поглощающее влагу вещество может поглощать влагу из воздуха в коробке передач или даже жидкую влагу (воду), и оно может поглощать влагу, содержащуюся в масле в коробке передач. Это стало возможным вследствие выбора поглощающего влагу вещества, которое имеет большее сходство с водой, чем сходство масла с водой, тем самым предохраняя масло от поглощения влаги/воды. Поглощающее влагу вещество может быть также выбрано таким, что будет иметь большее сходство с водой, чем с маслом, чтобы предотвратить поглощение поглощающим влагу веществом масла вместо влаги/воды. Подразумевается охватить как вещества с химическим сходством, так и вещества с физическим сходством. Примерами подходящих веществ являются поглощающие полимеры, например, так называемые сверхпоглощающие полимеры, такие как крахмал-акрилонитрильные сополимеры, сетчатые акриловые гомополимеры, сетчатые полиакрилатные/полиакриламидные сополимеры; молекулярные сита, такие как силикатный гель, зеолиты - микропористые алюминосиликаты; минералы, такие как сульфат кальция, хлорид кальция, сульфат магния; глины, такие как монтмориллонитовая глина. Поглощающее влагу вещество также должно быть химически совместимым с используемой смазкой, т.е. смазка не должна химически повреждаться поглощающим влагу веществом, например, вследствие химических реакций с веществом или катализирования веществом.
Вещества с совмещенным химическим и физическим сходством также могут использоваться, например, вещества, имеющие физическое сходство в форме полостей, и где полости также имеют химическое сходство в соответствии с вышеприведенным обсуждением, касающимся сходства. Примерами таких веществ являются зеолиты, например, молекулярное сито 3A, натриевый/калиевый алюминосиликат.
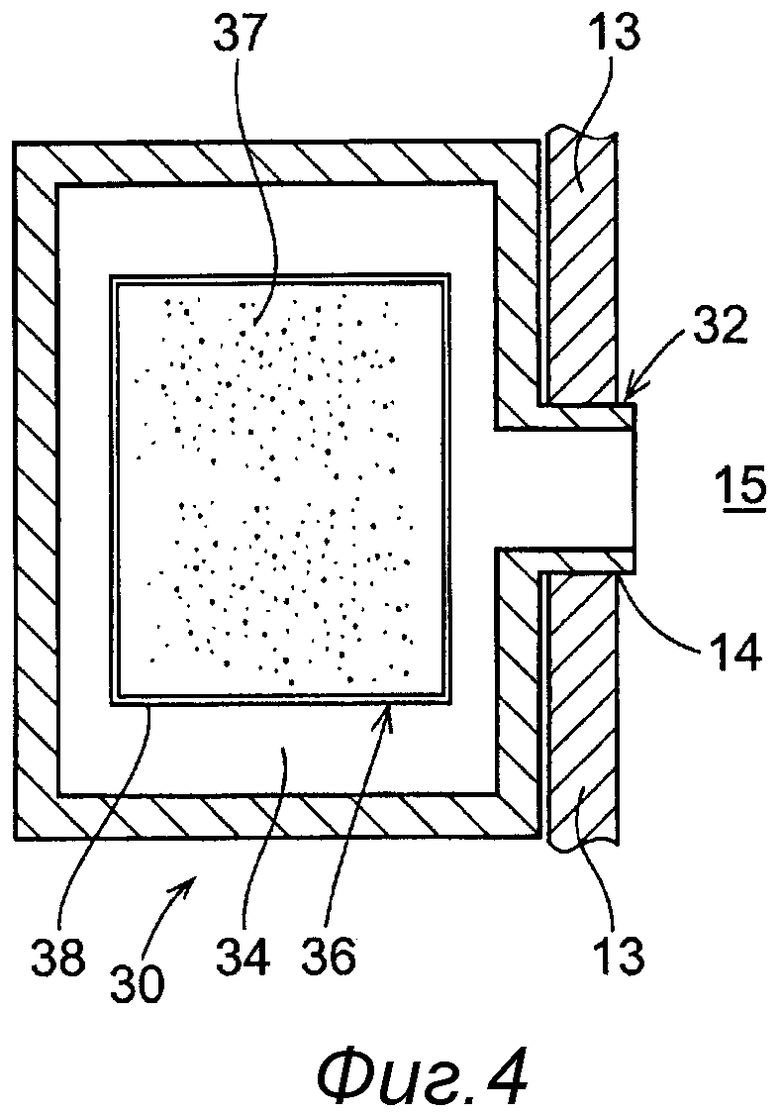
На фиг.4 показан второй вариант осуществления поглощающего влагу устройства 30. Это устройство похоже на устройство согласно первому варианту осуществления тем, что оно содержит полую часть 34 во внутренностях пробки 32, чья полая часть расположена снаружи коробки передач, когда пробка вставлена в отверстие 14. В этой полой части 24 расположено поглощающее влагу тело 36 из поглощающего влагу вещества 37. Существует свободная связь между внутренностями 15 коробки передач и внутренностями пробки с поглощающим влагу веществом 37. В этом варианте осуществления поглощающее влагу тело 36 изображено меньшим, чем в первом варианте осуществления, и есть некоторое количество свободного пространства между телом 36 и внутренней стенкой полой части 34. Это позволяет поглощающему влагу веществу 37 расширяться/изменять объем внутри полой части 34 во время поглощения влаги. Поглощающее влагу вещество может быть одним из подходящих, выбранных из вышеупомянутых примеров веществ или любым другим подходящим расширяющимся веществом. Расширение вещества может использоваться как показатель того, как много влаги поглотило устройство. Если требуется, и в зависимости от используемого вещества, поглощающее влагу вещество может содержаться внутри пропускающей влагу/воду пленки или оболочки 38 или подобной, как изображено на фиг.4. Это предотвратит проникновение вещества во внутренности коробки передач. Эта оболочка должна быть из расширяемого или эластичного вещества, чтобы вместить расширение объема поглощающего влагу вещества. Она также должна быть совместимой с используемой смазкой, также как и поглощающее влагу вещество, как описано выше.
Примерами возможных пропускающих влагу/воду веществ оболочки являются полиэтиленовая пленка, полиэфир, слоистые материалы и т.д.
На фиг.5 показан третий вариант осуществления поглощающего влагу устройства согласно настоящему изобретению. В этом варианте осуществления часть пробки 42, которая формирует поглощающее влагу устройство 40, расположена во внутренностях 15 коробки передач. Как и в предыдущих вариантах осуществления, устройство содержит поглощающее влагу тело 46, содержащее поглощающее влагу вещество 47. Поглощающее влагу вещество 47 содержится в пропускающей воду пленке или оболочке 48, которая сохраняет поглощающее влагу вещество на месте и присоединенным к пробке 42, и в то же время не препятствует поглощению влаги веществом. Функция соответствует тому, что было описано выше, и примеры веществ являются теми же, что и приведенные выше.
На фиг.6 показан четвертый вариант осуществления поглощающего влагу устройства 50 согласно настоящему изобретению. Это устройство интегрировано в маслозаливную пробку 52, которая может быть, например, контрольной маслозаливной пробкой, вставленной в контрольное отверстие в коробке передач. Поглощающее влагу тело 56 вместе со своим поглощающим влагу веществом 58 полностью содержится внутри пробки посредством размещения в полой части 54, предоставленной внутри пробки, с отверстием, обращенным к внутренностям 15 коробки передач. Пробка главным образом спроектирована с возможностью использования как обычная маслозаливная пробка.
Может быть желательным иметь возможность получать информацию о состоянии поглощающего влагу вещества в легкодоступной форме. Это уже было описано в связи с фиг.4, как поглощающее влагу вещество может быть такого вида, который изменяет объем в зависимости от степени поглощения влаги. Альтернативно поглощающее вещество может быть выбрано таким, что будет иметь другие физические свойства, которые приспособлены к изменению в зависимости от количества поглощенной влаги. Другим примером является поглощающее влагу вещество типа, который меняет цвет в зависимости от количества поглощенной влаги. Это изменение объема или цвета может быть, например, визуально проверено, чтобы определить, не поглотило ли устройство так много влаги, что сейчас время заменить его новым устройством. Визуальная проверка может быть сделана посредством удаления пробки с поглощающим влагу устройством. На фиг.1 изображена другая альтернатива. Внешняя стенка полой части 24 пробки 22 снабжена прозрачной частью 21, через которую поглощающее вещество 27 может быть визуально проверено. Другим примером возможного меняющегося физического свойства является электрическое сопротивление.
Согласно другой альтернативе, изображенной на фиг.5, поглощающее влагу устройство может содержать сенсорное устройство 45, приспособленное для испускания сигнала, отражающего состояние поглощенной влаги в поглощающем влагу устройстве, в устройство отображения, которое отображает состояние поглощенной влаги. Устройством отображения может быть, например, лампа или устройство, издающее звуковой сигнал. Альтернативно, сенсорное устройство может испускать сигнал в систему 1a управления. Эта система управления может быть устройством управления роботом, службой дистанционного доступа, устройством дистанционного управления или любым другим типом системы управления или устройством, обычно используемым в связи с промышленными роботами. Сигнал может испускаться посредством любых подходящих средств, беспроводных или нет. Примерами возможных сенсоров являются сенсоры, использующие электрическое сопротивление для измерения уровня влаги.
Естественно, различные типы индикаторов состояния, изменения объема, изменения цвета, сенсоров, испускающих сигнал в различные системы, могут быть применены в любом из описанных вариантов осуществления поглощающего влагу устройства.
Во всех изображенных вариантах осуществления пробка с поглощающим влагу устройством является съемной для возможности замены поглощающего влагу устройства/пробки новой всякий раз, когда это желательно или необходимо.
Настоящее изобретение не ограничено раскрытыми примерами, но может быть изменено различными способами, которые будут очевидны специалисту в данной области техники, в пределах объема прилагаемой формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Кисть промышленного робота | 1982 |
|
SU1168090A3 |
| Промышленный робот | 1983 |
|
SU1127765A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОМЫШЛЕННЫМ РОБОТОМ | 2005 |
|
RU2279971C1 |
| Промышленный робот | 1984 |
|
SU1301528A1 |
| Промышленный робот | 1986 |
|
SU1368166A1 |
| Промышленный робот | 1977 |
|
SU738864A1 |
| МНОГОКООРДИНАТНЫЙ ПРОМЫШЛЕННЫЙ РОБОТ С ИНТЕГРИРУЕМЫМ ИНСТРУМЕНТОМ | 2013 |
|
RU2603938C2 |
| Промышленный робот | 1990 |
|
SU1805028A1 |
| Промышленный робот | 1982 |
|
SU1087061A3 |
| Промышленный робот | 1986 |
|
SU1509244A1 |
Изобретение относится к промышленному роботу и системе очистки смазки его коробки передач. Промышленный робот содержит двигатель и коробку передач, содержащую смазку. Коробка передач снабжена интегрированным поглощающим влагу устройством, содержащим поглощающее влагу вещество. Изобретение также относится к способу для предотвращения повреждения смазки из-за поглощения влаги внутри промышленного робота, используемого в среде с высокой влажностью. Достигается повышение долговечности работы устройства. 4 н. и 14 з.п. ф-лы, 6 ил. 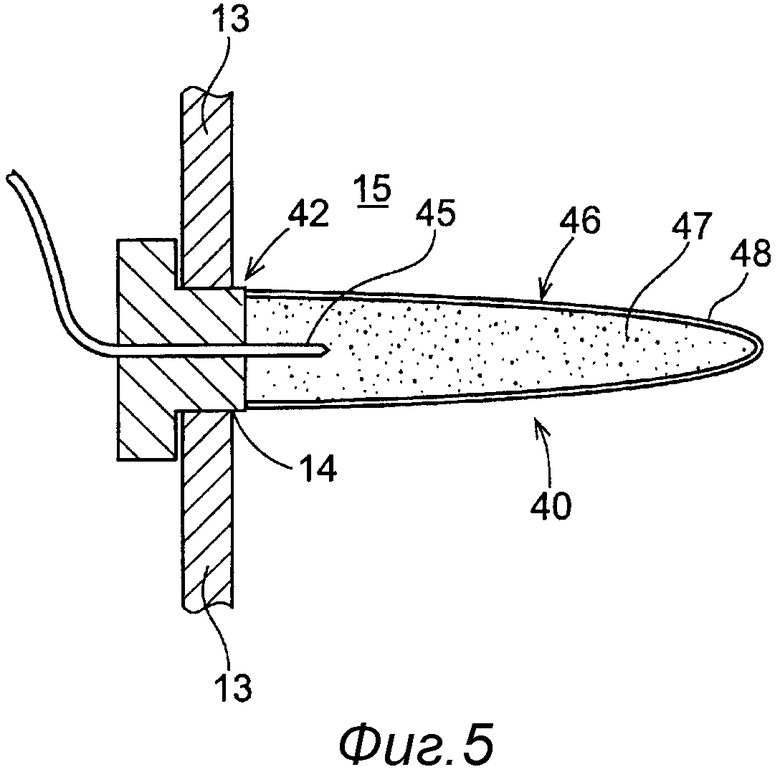
1. Система (9) передачи промышленного робота для передачи движения к части робота, содержащей, по меньшей мере, один двигатель (10) и, по меньшей мере, одну коробку (12) передач, содержащую смазку, отличающаяся тем, что коробка передач снабжена интегрированным поглощающим влагу устройством (20; 30; 40; 50), содержащим поглощающее влагу вещество (27; 37; 47; 57), приспособленное для поглощения влаги, содержащейся в коробке передач.
2. Система передачи по п.1, отличающаяся тем, что поглощающее влагу устройство (20; 30; 40; 50) содержит поглощающее влагу вещество (27; 37; 47; 57) с более высоким сходством с водой, чем сходство смазки с водой.
3. Система передачи по п.1 или 2, отличающаяся тем, что поглощающее влагу устройство (20; 30; 40; 50) содержит поглощающее влагу вещество (27; 37; 47; 57) с более высоким сходством с водой, чем со смазкой.
4. Система передачи по п.1, отличающаяся тем, что поглощающее влагу устройство (20; 30; 40; 50) является съемным.
5. Система передачи по п.1, отличающаяся тем, что поглощающее влагу устройство (20; 30; 40; 50) является частью пробки (22; 32; 42; 52), расположенной в отверстии (14) стенки (13) коробки (12) передач.
6. Система передачи по п.1, отличающаяся тем, что коробка (12) передач снабжена, по меньшей мере, одним маслозаливным отверстием для заливки или слива смазки из коробки передач, и поглощающее влагу устройство (20; 30; 40; 50) интегрировано в пробку маслозаливного отверстия, спроектированную с возможностью вставки в маслозаливное отверстие.
7. Система передачи по п.1, отличающаяся тем, что поглощающее влагу устройство (30; 40) содержит пропускающую влагу оболочку (38; 48), окружающую поглощающее влагу вещество.
8. Система передачи по п.1, отличающаяся тем, что поглощающее влагу устройство (20; 30; 40; 50) содержит поглощающее влагу вещество (27; 37; 47; 57), имеющее физическое свойство, которое приспособлено к изменению в зависимости от количества поглощенной влаги.
9. Система передачи по п.1, отличающаяся тем, что поглощающее влагу устройство (40) содержит сенсорное устройство (45), приспособленное для испускания сигнала, отражающего состояние поглощенной влаги в поглощающем влагу устройстве, в устройство отображения, которое отображает состояние поглощенной влаги.
10. Система передачи по п.1, отличающаяся тем, что поглощающее влагу устройство (40) содержит сенсорное устройство (45), приспособленное для испускания сигнала, отражающего состояние поглощенной влаги в поглощающем влагу устройстве, в систему (1a) управления.
11. Промышленный робот, содержащий систему (9) передачи с интегрированным поглощающим влагу устройством (20; 30; 40; 50) по любому из пп.1-10.
12. Способ для предотвращения повреждения смазки вследствие поглощения влаги внутри промышленного робота, используемого в среде с высокой влажностью, отличающийся тем, что интегрируют поглощающее влагу устройство (20; 30; 40; 50), содержащее поглощающее влагу вещество (27; 37; 47; 57), в часть робота, содержащую смазку.
13. Способ по п.12, отличающийся тем, что выбирают поглощающее влагу вещество (27; 37; 47; 57) с более высоким сходством с водой, чем сходство смазки с водой.
14. Способ по п.12 или 13, отличающийся тем, что выбирают поглощающее влагу вещество (27; 37; 47; 57) с более высоким сходством с водой, чем со смазкой.
15. Способ по п.12, отличающийся тем, что выбирают поглощающее влагу вещество (27; 37; 47; 57), имеющее физическое свойство, которое приспособлено к изменению в зависимости от количества поглощенной влаги.
16. Способ по п.12, отличающийся тем, что интегрируют поглощающее влагу устройство (20; 30; 40; 50) в часть пробки (22; 32; 42; 52), расположенную в отверстии (14) в стенке (13) коробки (12) передач, содержащей смазку и являющейся частью системы (9) передачи для передачи движения к части робота.
17. Способ по п.16, отличающийся тем, что интегрируют поглощающее влагу устройство (20; 30; 40; 50) в маслозаливную пробку коробки передач.
18. Способ для поглощения влаги внутри коробки передач, содержащей смазку, в промышленном роботе путем того, что интегрируют поглощающее влагу устройство (20; 30; 40; 50), содержащее поглощающее влагу вещество (27; 37; 47; 57), в коробку (12) передач.
| WO 2004007152 A1, 22.01.2004 | |||
| DE 202009000799 U1, 26.03.2009 | |||
| US 4609458 A, 02.09.1986 | |||
| JPH 09239212 A, 19.06.1997 | |||
| Система управления аппаратом для очистки масла от воды | 1984 |
|
SU1187837A1 |
| JPS 54129252 A, 06.10.1979 | |||

