S
(Л
со
Од 00
оз
о
136
система 20 управления включает левый. и выключает правый распределители 6. Выключается тормоз 24, убираются вправо управляемые упоры 15, 16 переднего и заднего ходов, подается напряжение на датчик 22. Шток 4 с рейкой 7 перемещается вправо, а вал 14 с жестким упором 13 через зубчато- реечную передачу и дополнительную повьшающую зубчатую коробку передач (колеса 8, 9, 10, 11, 12) начинает вращаться по часовой стрелке. При прохождении флажка 21 мимо датчика 22, последний подает сигнал в систему
6
20 управления. После прохождения п сигналов система управления дает команду на выдвижение упора 15 и вклю-: чение тормоза 24. Рабочий элемент 25 тормоза 24 тормозит движущиеся элементы робота, упор 13 входит в зацепление с упором 15 и схват останавливается в заданной точке. Аналогично робот работает при втягивании и повороте -руки. Изменение дискретности осуществляется за счет изменения числа оборотов выходного вала 14 коробки передач и установкой дополнительного количества жестких упоров 133 ил.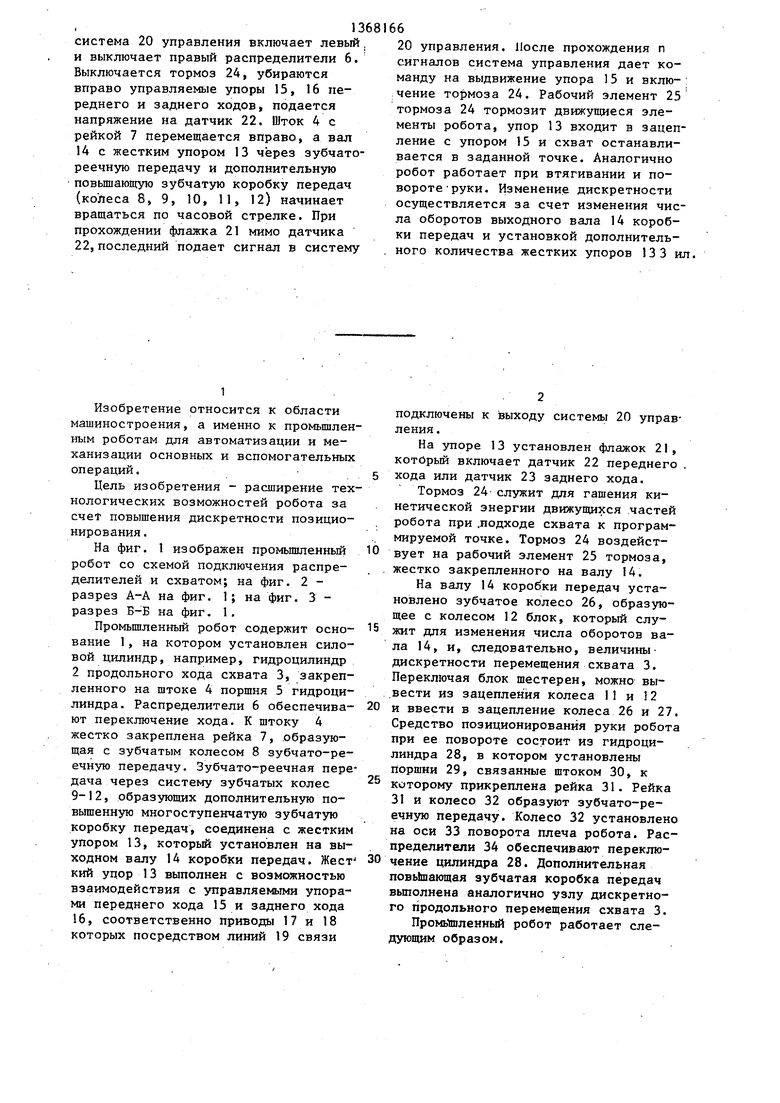
| название | год | авторы | номер документа |
|---|---|---|---|
| ГУСЕНИЧНЫЙ ТРАКТОР | 2008 |
|
RU2385249C1 |
| Автоматизированный комплекс для штамповки крупногабаритных деталей | 1985 |
|
SU1324725A1 |
| Манипулятор | 1984 |
|
SU1202861A1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Автоматический манипулятор | 1989 |
|
SU1660951A1 |
| КОРОБКА ПЕРЕДАЧ САМОХОДНОЙ МАШИНЫ | 2020 |
|
RU2753023C1 |
| Адаптивный захватный модуль промышленного робота | 1989 |
|
SU1689063A1 |
| Устройство для подачи листа | 1981 |
|
SU1030074A1 |
| Промышленный робот | 1987 |
|
SU1537514A1 |
| Захват промышленного робота | 1979 |
|
SU841962A1 |
Изобретение относится к машиностроению, а именно к промьппленным роботам для автоматизации и механизации основных и вспомогательных операций. Целью изобретения является расширение технологических возможностей робота за счет повьппения дискретности позиционирования. Для продольного перемещения охвата 3
1
Изобретение относится к области машиностроения, а именно к промышленным роботам для автоматизации и механизации основных и вспомогательных операций. .
Цель изобретения - расширение технологических возможностей робота за счет повышения дискретности позиционирования .
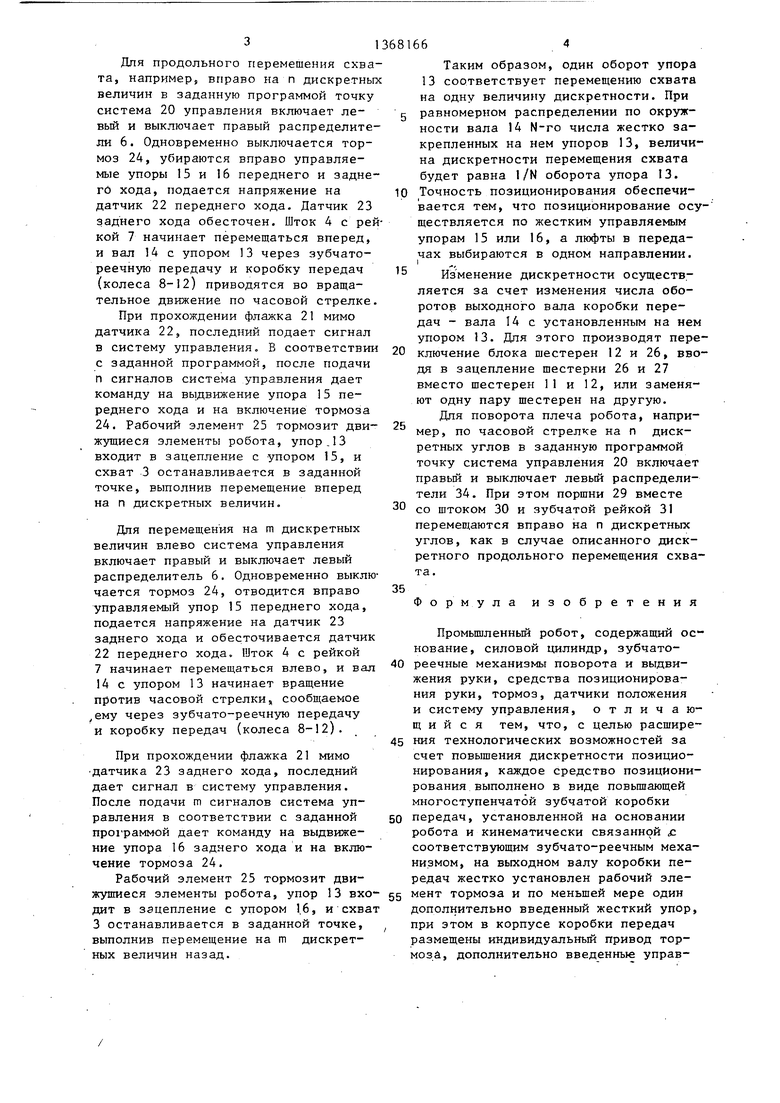
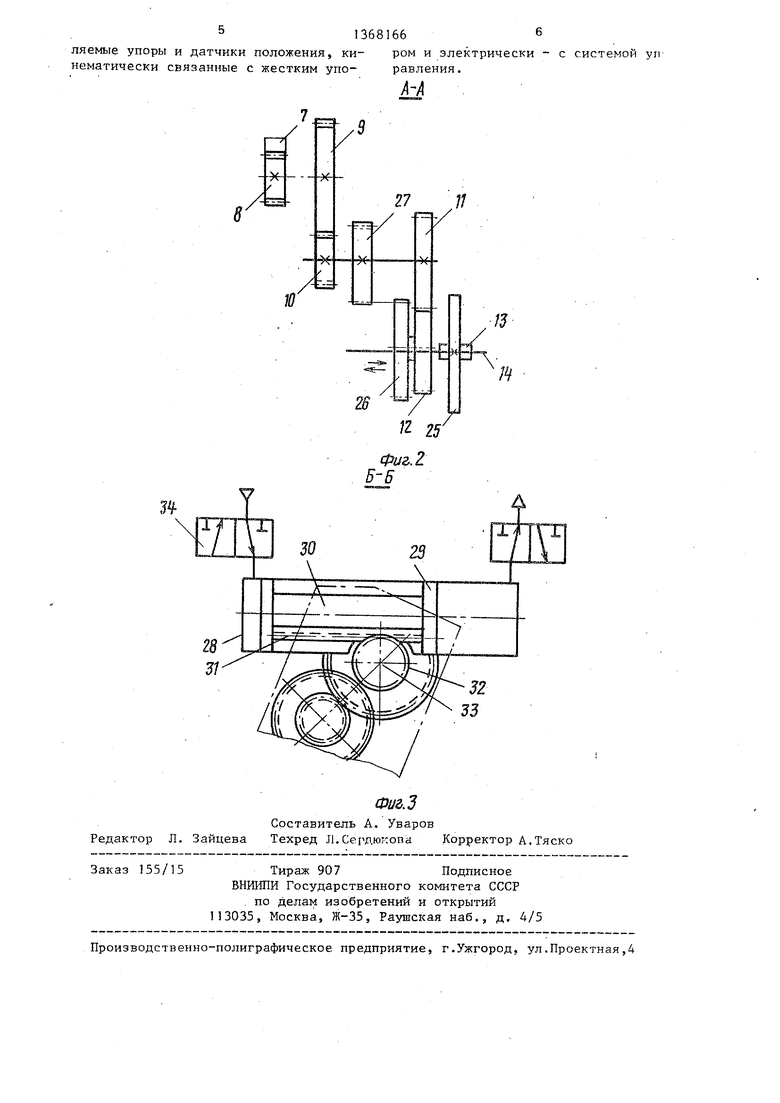
На фиг. 1 изображен промьшшенный робот со схемой подключения распределителей и схватом; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1.
Промышленный робот содержит осно- вание 1, на котором установлен силовой цилиндр, например, гидроцилиндр 2 продольного хода охвата 3, закрепленного на штоке 4 поршня 5 гидроцилиндра. Распределители 6 обеспечива- ют переключение хода. К штоку 4 жестко закреплена рейка 7, .образующая с зубчатым колесом 8 зубчато-реечную передачу. Зубчато-реечная передача через систему зубчатых колес 9-12, образующих дополнительную повышенную многоступенчатую зубчатую коробку передач, соединена с жестким упором 13, которьй установлен на выходном валу 14 коробки передач. Жест кий уцор 13 выполнен с возможностью взаимодействия с управляеьыми упорами переднего хода 15 и заднего хода 16, соответственно приводы 17 и 18 которых посредством линий 19 связи
подключены к выходу системы 20 управления .
На упоре 13 установлен флажок 21, который включает датчик 22 переднего хода или датчик 23 заднего хода.
Тормоз 24 служит для гашения кинетической энергии движущихся частей робота при .подходе схвата к программируемой точке. Тормоз 24 воздействует на рабочий элемент 25 тормоза, жестко закрепленного на валу 14.
На валу 14 коробки передач установлено зубчатое колесо 26, образующее с колесом 12 блок, который служит для изменения числа оборотов вала 14, и, следовательно, величины дискретности перемещения схвата 3. Переключая блок шестерен, можно вы- .вести из зацепления колеса I1 и 12 и ввести в зацепление колеса 26 и 27 Средство позиционирования руки робота при ее повороте состоит из гидроцилиндра 28, в котором установлены Поршни 29, связанные штоком 30, к которому прикреплена рейка 31. Рейка 31 и колесо 32 образуют зубчато-ре- ечную передачу. Колесо 32 установлено на оси 33 поворота плеча робота. Распределители 34 обеспечивают переключение цилиндра 28. Дополнительная повьЬпающая зубчатая коробка передач выполнена аналогично узлу дискретного продольного перемещения схвата 3.
Промь1щленный робот работает следующим образом.
Для продольного перемещения схва та, например, вправо на п дискретны величин в заданную nporpai Moft точку система 20 управления включает ле- вый и выключает правый распределители 6. Одновременно выключается тормоз 24, убираются вправо управляемые упоры 15 и 16 переднего и аадне гй хода, подается напряжение на датчик 22 переднего хода. Датчик 23 заднего хода обесточен. Шток 4 с рейкой 7 начинает перемещаться вперед, и вал 14 с упором 13 через зубчато- реечную передачу и коробку передач (колеса 8-12) приводятся во вращательное движение по часовой стрелке
При прохождении флажка 21 мимо датчика 22, последний подает сигнал в систему управления. В соответствии с заданной программой, после подачи п сигналов система управления дает команду на выдвижение упора 15 переднего хода и на включение тормоза 24. Рабочий элемент 25 тормозит дви- жущиеся элементы робота, упор, 13 входит в зацепление с упором 15, и схват 3 останавливается в заданной точке, выполнив перемещение вперед на п дискретных величин.
Для перемещения на m дискретных величин влево система управления включает правый и выключает левый распределитель 6. Одновременно выключается тормоз 24, отводится вправо управляемый упор 15 переднего хода, подается напряжение на датчик 23 заднего хода и обесточивается датчик 22 переднего хода. Шток 4 с рейкой 7 начинает перемещаться влево, и вал 14 с упором 13 начинает вращение против часовой стрелки, сообщаемое ему через зубчато-реечную передачу и коробку передач (колеса 8-12).
При прохождении флажка 21 мимо датчика 23 заднего хода, последний дает сигнал в систему управления. После подачи m сигналов система управления в соответствии с заданной программой дает команду на выдвижение упора 16 заднего хода и на включение тормоза 24.
Рабочий элемент 25 тормозит дви
жушиеся элементы робота, упор 13 вхо- 55 мент тормоза и по меньшей мере один дит в зацепление с упором 1,6, и схват дополнительно введенный жесткий упор, 3 останавливается в заданной точке, при этом в корпусе коробки передач выполнив перемещение на m дискрет- размещены индивидуальный привод торных величин назад.мозй, дополнительно введеннью управ - ю 15
20 25 зо
35
0
0
5
Таким образом, один оборот упора 13 соответствует перемещению схвата на одну величину дискретности. При равномерном распределении по окружности вала 14 N-ro числа жестко закрепленных на нем упоров 13, величина дискретности перемещения схвата будет равна 1/N оборота упора 13. Точность позиционирования обеспечивается тем, что позиционирование осуществляется по жестким управляемым упорам 15 или 16, а люфты в передачах выбираются в одном направлении.
Изменение дискретности осуществляется за счет изменения числа оборотов выходного вала коробки передач - вала 14 с установленным на нем упором 13. Для этого производят переключение блока шестерен 12 и 26, вводя в зацепление шестерни 26 и 27 вместо шестерен 11 и 12, или заменяют одну пару шестерен на другую.
Для поворота плеча робота, например, по часовой стрелке на п дискретных углов в заданную программой точку система управления 20 включает правьй и выключает левый распределители 34. При этом поршни 29 вместе со штоком 30 и зубчатой рейкой 31 перемещаются вправо на п дискретных углов, как в случае описанного дискретного продольного перемещения схвата.
Формула изобретения
Промьш1ленный робот, содержащий основание, силовой цилиндр, зубчато- реечные механизмы поворота и выдвижения руки, средства позиционирования руки, тормоз, датчики положения и систему управления, отличающийся тем, что, с целью расширения технологических возможностей за счет повышения дискретности позиционирования, каждое средство позиционирования выполнено в виде повьппающей многоступенчатой зубчатой коробки передач, установленной на основании робота и кинематически связанной с. соответствующим зубчато-реечным механизмом, на выходном валу коробки передач жестко установлен рабочий эле51368166
ляемые упоры и датчики положения, ки- ром и электрически - с системой ул нематически связанные с жестким упо- равления.
к-к
30
,1, Г f/
27
11
П
м.,
щ
2S
7
7Z 15
г
Фиг.2 5-6
| Промышленный робот | 1974 |
|
SU503712A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
