Изобретение относится к обработке металлов давлением, в частности к автоматизации массового и крупносерийного производства деталей методом обработки давлением и раскатки.
Целью изобретения является повышение производительности и расширение технологических возможностей.
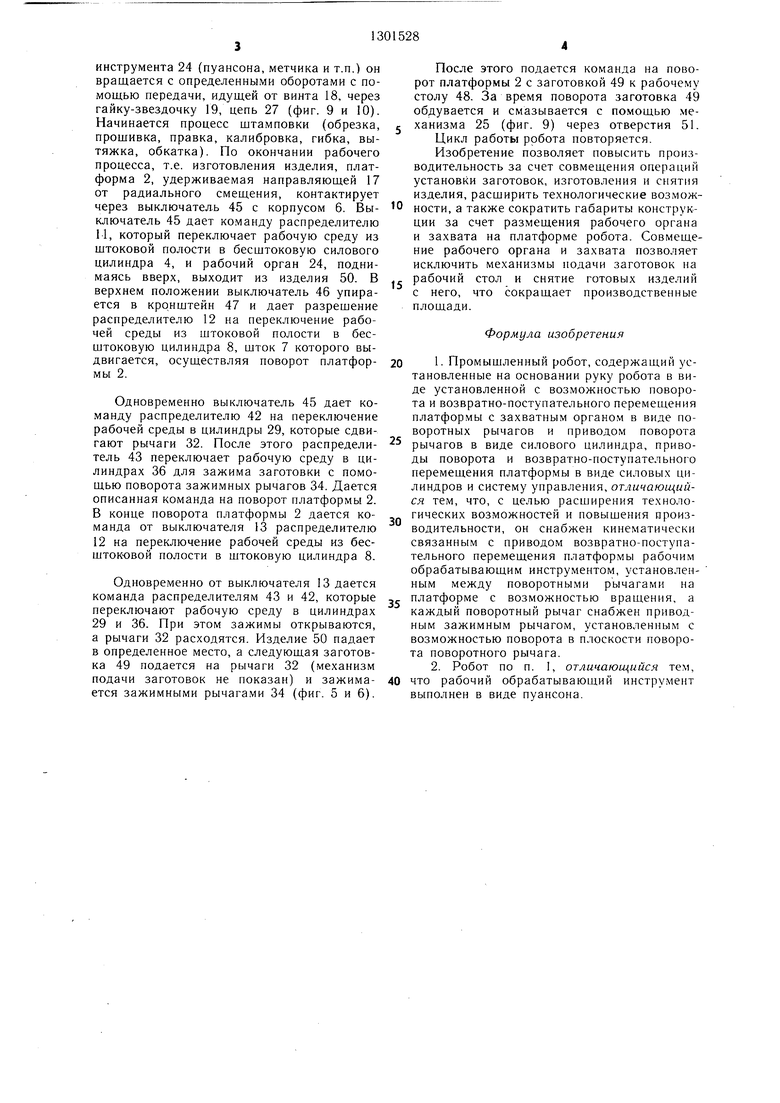
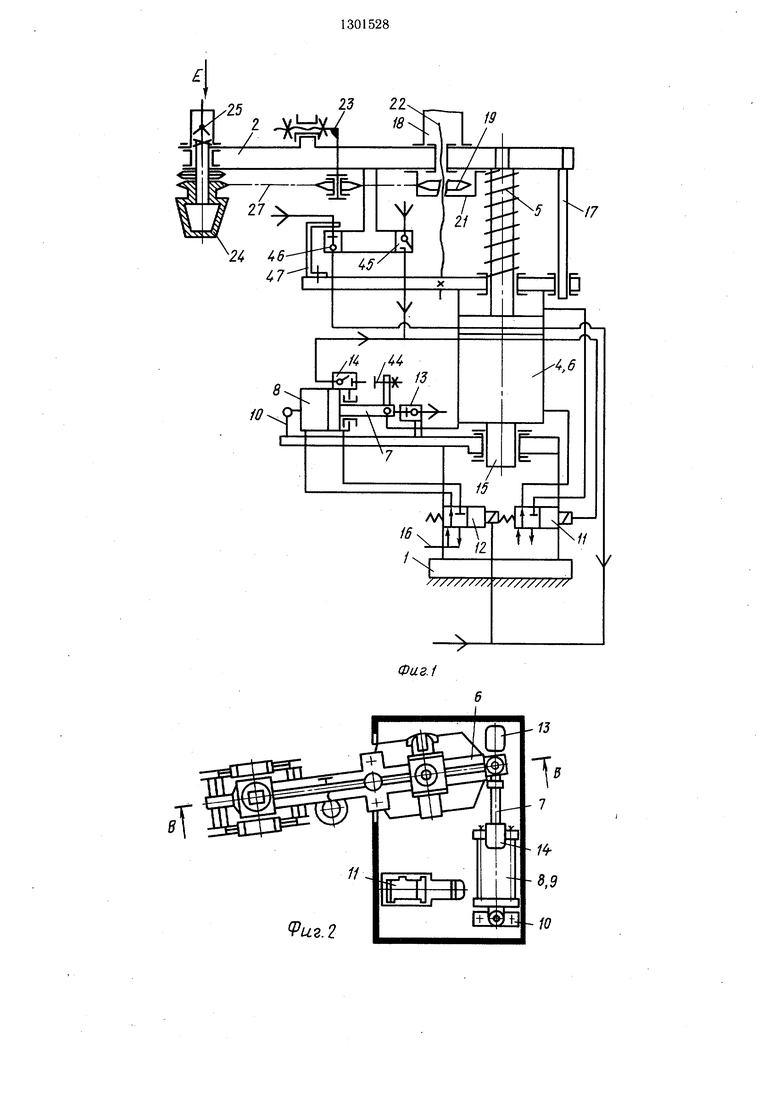
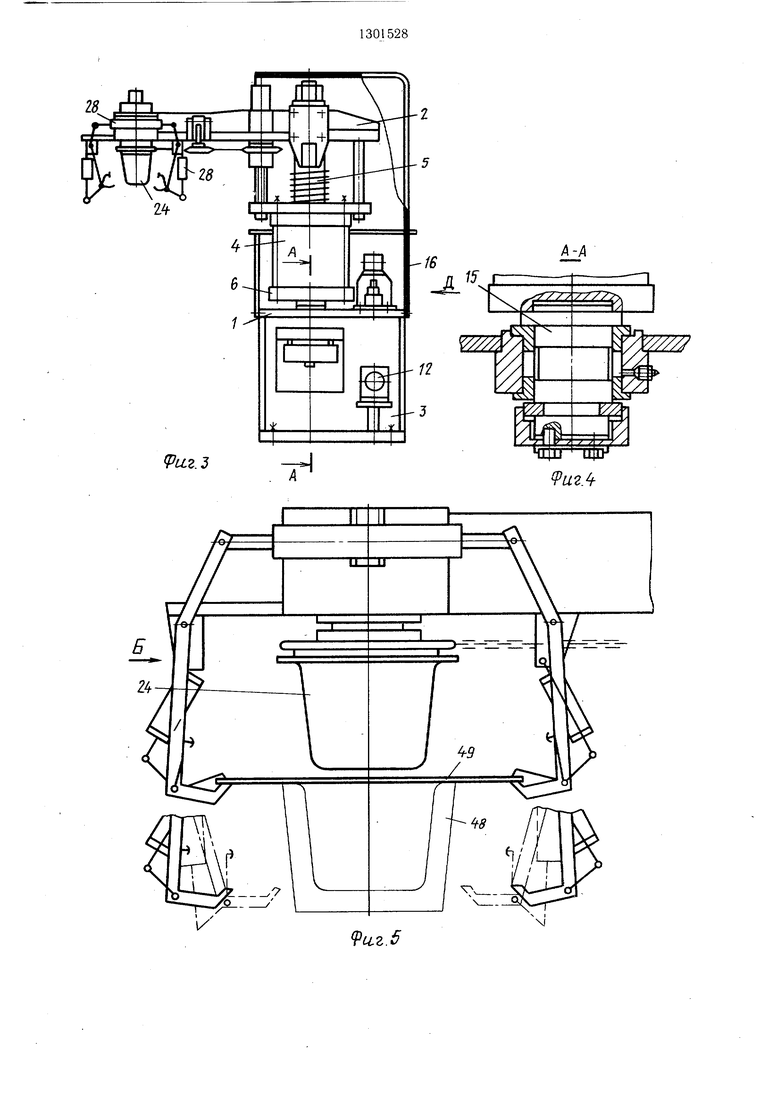
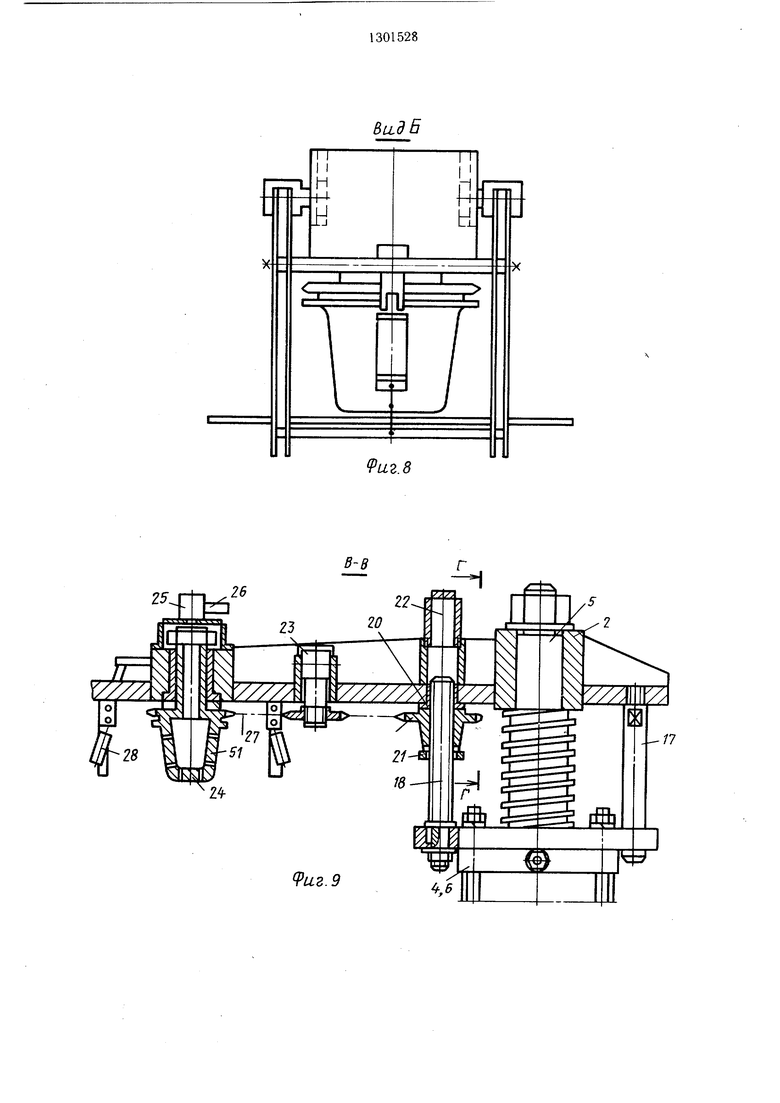
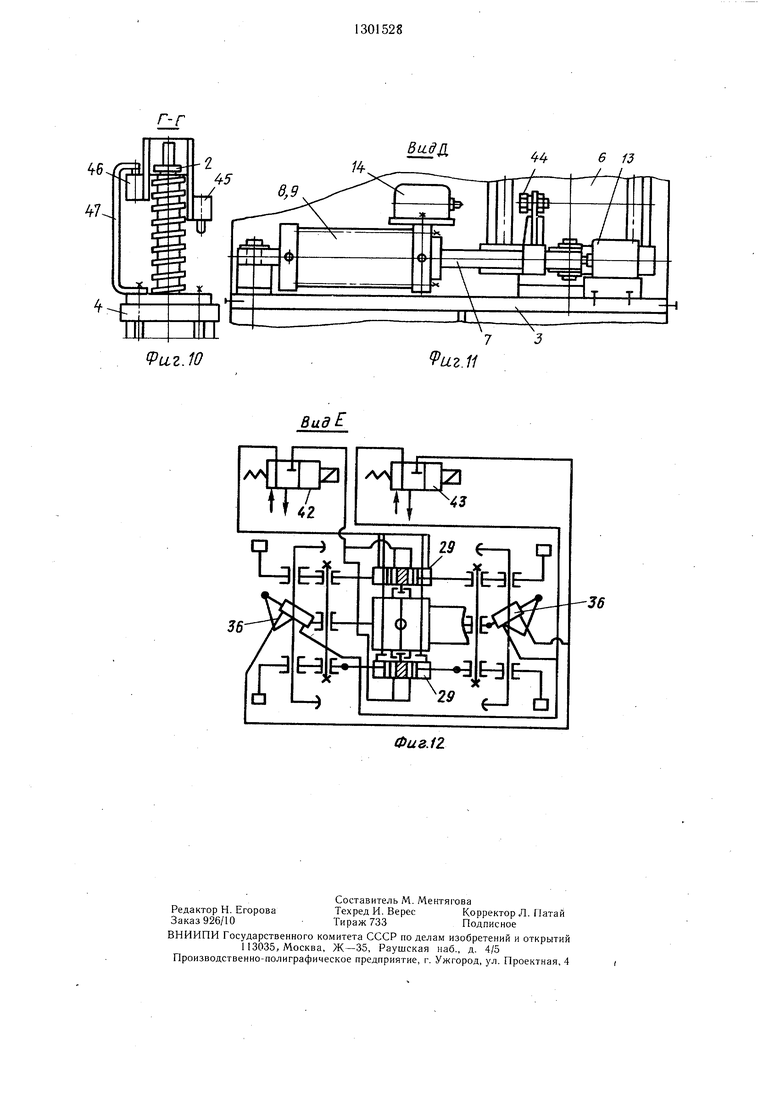
На фиг. 1 дана кинематическая схема робота; на фиг. 2 - робот, общий вид в плане; на фиг. 3 - то же, обший вид сбоку; на фиг. 4 - разрез А-А на фиг. 3; на фиг. 5 - захват и рабочий орган в начале штамповки; на фиг. 6 - то же, в конце штамповки; на фиг. 7 - то же, в плане; на фиг. 8 - вид Б на фиг. 5; на фиг. 9 - разрез В-В на фиг. 2; на фиг. 10 - разрез Г-Г на фиг. 9; на фиг. 11 - вид D на фиг. 3; на фиг. i2 вид Е на фиг. 1.
Робот содержит основание 1 (фиг. 2-3) с установленной на нем платформой 2.
Основание 1 состоит из корпуса 3 коробчатого сечения, на котором установлен силовой цилиндр 4 со штоком 5, связанным с платформой 2. Корпус 6 цилиндра 4 шар- нирно соединен со штоком 7 силового цилиндра 8, корпус 9 которого шарнирно соединен с опорой 10 корпуса 3. Распределители 11 и 12 связаны трубопроводами подачи рабочей среды с силовыми цилиндрами 4 и 8. Выключатель 13 закреплен на корпусе 3, выключатель 14 - на корпусе 9 силового цилиндра 8. Силовой цилиндр 4 снабжен опорным узлом 15 (фиг. 4). Силовые цилиндры 4 и 8 установлены в кожухе 16 робота.
На платформе 2 (фиг. 9), смонтированной на штоке 5 силового цилиндра 4, установлены направляющая 17, винт 18, связанный с силовым цилиндром 4, гайка-звездочка 19, смонтированная на винте, которая удерживается от движения вверх фланцем 20, а вниз - опорной скобой 21, съемный колпачок 22, предохраняющий винт 18 от загрязнения, натяжное устройство 23, рабочий обрабатываюший инструмент 24, выполненный в виде пуансона-звездочки, механизм 25 обдува и смазки, соединенный трубопроводом 26 с распределителем 12 (фиг. 1). Цепь 27 служит приводным органом для рабочего обрабатывающего ин- - струмента 24 от гайки-звездочки 19.
Захватный орган 28, закрепленный на платформе 2, служит для захвата заготовок и съема изделий. Он содержит силовые цилиндры 29 (фиг. 5, 6), закрепленные в продольных Т-образных пазах 30 платформы 2. Кронштейны 31, закрепленные на платформе, служат для крепления поворотных рычагов 32 с помощью осей 33.
Поворотные рычаги 32, в свою очередь, имеют приводные зажимные рычаги 34, шарнирно связанные через штоки 35 с силовыми цилиндрами 36, которые шарнирно подвешены на кронштейнах 31. Приводные
5
0
5
0
5
0
5
0
55
зажимные рычаги 34 установлены на осях 37, закрепленных в нижней части поворотных рычагов 32.
Силовые цилиндры 29 содержат корпус 38 с Т-образным выступом 39, который входит в Т-образный паз 30 для обеспечения возможности вертикального переме- шения цилиндров 29. Два поршня 40 размешены в корпусе 38, штоки которых 41 щар- нирно связаны с рычагами 32. Распределители 42 и 43 (фиг. 1) размещены на основании 1. На штоке 7 силового цилиндра 8 закреплен регулировочный винт 44. Выключатели 45 и 46 (фиг. 1) закреплены на платформе 2. Кронштейн 47 служит упором для выключателя 46. Механизм 25 обдува и смазки (фиг. 1 и 9) служит для обдува размещенной на рабочем столе 48 за- готвки 49 (фиг. 5), а также ее смазки перед процессом изготовления и во время изготовления изделия 50 через отверстия 51 (фиг. 9) в рабочем обрабатывающем инструменте 24. Блок управления включает в себя распределители 11, 12, 42, 43 и выключатели 13, 14, 45, 46, которые размещены на корпусе 3 робота.
Робот устанавливается возле рабочего стола 48, на котором могут быть закреплены матрицы цельные или разъемные, в зависимости от изготавливаемого изделия. Исходное положение промышленного робота.
Платформа 2 находится в верхнем положении над листом расположения заготовок, рабочая среда из распределителя 11 поступает в нижнюю полость силового цилиндра 4, из распределителя 12 - в бес- штоковую полость силового цилиндра 8, из распределителя 42 - в штоковую полость цилиндров 29, из распределителя 43 - в бес штоковую полость цилиндров 36.
Робот работает следующим образом. При установке заготовки (например, листа) на место захвата дается команда распределителю 43, который перераспределяет рабочую среду в щтоковую полость силовых цилиндров 36, щтоки 35 которых вдвигаются и зажимные рычаги 34 зажимают заготовку с определенным усилием. Далее распределитель 12 переключает рабочую среду в штоковую полость силового цилиндра 8, шток 7 которого вдвигается, и в конце хода регулировочный винт 44 взаимодействует с выключателем 14, который дает команду на переключение рабочей среды распределителю 11 и распределителю 43. Рабочая среда поступает в штоковую полость силового цилиндра 4, и шток 5 с платформой 2 опускается.
Одновременно рабочая среда поступает в бесштоковую полость силовых цилиндров 36 и штоки 35 поднимают зажимные рычаги 34, освобождая заготовку 49, которая ложится на рабочий стол 48 {матрицу и т.п.). При опускании рабочего обрабатывающего
инструмента 24 (пуансона, метчика и т.п.) он вращается с определенными оборотами с помощью передачи, идущей от винта 18, через гайку-звездочку 19, цепь 27 (фиг. 9 и 10). Начинается процесс штамповки (обрезка, прощивка, правка, калибровка, гибка, вытяжка, обкатка). По окончании рабочего процесса, т.е. изготовления изделия, платформа 2, удерживаемая направляющей 17 от радиального смещения, контактирует через выключатель 45 с корпусом 6. Выключатель 45 дает команду распределителю 11, который переключает рабочую среду из щтоковой полости в бесштоковую силового цилиндра 4, и рабочий орган 24, поднимаясь вверх, выходит из изделия 50. В верхнем положении выключатель 46 упирается в кронштейн 47 и дает разрешение распределителю 12 на переключение рабочей среды из штоковой полости в бес- щтоковую цилиндра 8, шток 7 которого выдвигается, осуществляя поворот платформы 2.
Одновременно выключатель 45 дает команду распределителю 42 на переключение рабочей среды в цилиндры 29, которые сдвигают рычаги 32. После этого распределитель 43 переключает рабочую среду в цилиндрах 36 для зажима заготовки с помощью поворота зажимных рычагов 34. Дается описанная команда на поворот платформы 2. В конце поворота платформы 2 дается команда от выключателя 13 распределителю 12 на переключение рабочей среды из бес- штокювой полости в штоковую цилиндра 8.
Одновременно от выключателя 13 дается команда распределителям 43 и 42, которые переключают рабочую среду в цилиндрах 29 и 36. При этом зажимы открываются, а рычаги 32 расходятся. Изделие 50 падает в определенное место, а следующая заготовка 49 подается на рычаги 32 (механизм подачи заготовок не показан) и зажимается зажимными рычагами 34 (фиг. 5 и 6).
0
После этого подается команда на поворот платформы 2 с заготовкой 49 к рабочему столу 48. За время поворота заготовка 49 обдувается и смазывается с помощью ме- с ханизма 25 (фиг. 9) через отверстия 51.
Цикл работы робота повторяется.
Изобретение позволяет повысить производительность за счет совмещения операций установки заготовок, изготовления и снятия изделия, расширить технологические возможности, а также сократить габариты конструкции за счет размещения рабочего органа и захвата на платформе робота. Совмещение рабочего органа и захвата позволяет исключить механизмы подачи заготовок на рабочий стол и снятие готовых изделий с него, что сокращает производственные площади.
Формула изобретения
0 1- Промышленный робот, содержащий установленные на основании руку робота в виде установленной с возможностью поворота и возвратно-поступательного перемещения платформы с захватным органом в виде поворотных рычагов и приводом поворота рычагов в виде силового цилиндра, приводы поворота и возвратно-поступательного перемещения платформы в виде силовых цилиндров и систему управления, отличающийся тем, что, с целью расширения технологических возможностей и повышения производительности, он снабжен кинематически связанным с приводом возвратно-поступательного перемещения платформы рабочим обрабатывающим инструментом, установленным между поворотны.ми рычагами на
, платформе с возможностью вращения, а каждый поворотный рычаг снабжен приводным зажимным рычагом, установленным с возможностью поворота в плоскости поворота поворотного рычага.
2. Робот по п. I, отличающийся тем,
0 что рабочий обрабатывающий инструмент выполнен в виде пуансона.
5
9u2.2
13
2«, Ж
35
(риг.б
| название | год | авторы | номер документа |
|---|---|---|---|
| Робот | 1984 |
|
SU1271628A1 |
| Устройство для подачи заготовок | 1982 |
|
SU1047659A2 |
| Токарный автомат | 1978 |
|
SU768570A1 |
| Робот | 1988 |
|
SU1538994A1 |
| Устройство для подачи листового материала в зону обработки | 1987 |
|
SU1442301A1 |
| Устройство для подачи штучных заготовок в рабочую зону штампа | 1983 |
|
SU1174137A1 |
| Устройство для подачи заготовок | 1984 |
|
SU1207716A2 |
| Установка для прессования изделий из металлических порошков | 1975 |
|
SU610609A1 |
| МЕХАНИЧЕСКИЙ ПРЕСС | 1973 |
|
SU389959A1 |
| Устройство для подачи заготовок | 1985 |
|
SU1296368A1 |
Изобретение относится к обработке металлов давлением, в частности к автоматизации массового и крупносерийного нро- изводства деталей методом обработки давлением и раскатки. Цель изобретения - повышение производительности и расширение технологических возможностей. Поставленная цель достигается путем снабжения робота врашаюшимся рабочим обрабатываю- шим инструментом и зажимом заготовки, что позволяет отказаться от обрабатываю- ш,ей технологической машины и совместить процессы подачи заготовки, ее обработки и удаление готовых изделий. 1 з.п. ф-лы, 12 ил. оо о ел ю 00
Фиг.7
Bad Б
I I I I
h
т т
-i
иг.8
9иг.9
44
6 /J
73
(Риг.Ю
ВидЕ
иг.11
-36
Физ.12
| Манипулятор | 1975 |
|
SU608635A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Юревич Е | |||
| И | |||
| и др | |||
| Устройство промышленности роботов | |||
| - Л.: Машиностроение, 1980, с | |||
| Деревянная повозка с кузовом, устанавливаемым на упругих дрожинах | 1920 |
|
SU248A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
