Изобретение относится к системам регулирования и контроля движения дорожного транспорта и предназначено для обнаружения и видеофиксации нарушений правил дорожного движения транспортным средством, в том числе для видеофиксации транспортных средств, превышающих скорость.
Известен ручной видеозаписывающий скоростемер «ВИЗИР», разработанный компанией ОЛЬВИЯ, выполненный в виде моноблока, содержащего радиолокационный измеритель, видеокамеру с переменным фокусным расстоянием, процессорный модуль, модуль отображения информации (дисплей) [http://www.olvia.ru/rus/products.php?s=2&i=10]. Прибор обеспечивает измерение скорости самой быстрой цели и видеозапись процесса движения объекта. При наличии единственной цели на дороге достоверность ее идентификации обеспечивается последовательным, покадровым анализом зафиксированного видеоизображения процесса движения. В ходе этого анализа оператор должен убедиться, что во время измерений на дороге не было иных целей. Однако время анализа каждого стоп-кадра оператором аппаратно не ограничено, что, при наличии в поле зрения радиолокатора нескольких объектов движения, может привести к ошибкам объективного и субъективного характера в определении истинного нарушителя. В частности, для анализа может быть выбран стоп-кадр, на котором видна только одна цель, тогда как на предыдущем или последующем стоп-кадре видно, что целей несколько. В этом случае процесс идентификации цели осложняется: изучив видеозапись, оператору необходимо выявить в дорожном потоке ту цель, которая движется быстрее всех и именно ей присвоить результат измерения скорости. Предоставленная оператору техническая возможность использовать для оценки ситуации только один стоп-кадр из отснятой серии кадров вносит возможность влияния субъективных факторов и снижает достоверность измерения.
В качестве прототипа выбран радиолокационный видеофиксирующий измеритель (радар) скорости по патенту РФ на полезную модель №83644, опубл. 10.06.2009. Измеритель имеет в своем составе соединенные с блоком обработки информации радиолокационный измерительный модуль, блок индикации с дисплеем и телевизионный канал, содержащий видеокамеру, снабженную длиннофокусным объективом, а также имеет блок управления. Дополнительно имеется второй телевизионный канал, содержащий вторую видеокамеру, снабженную вторым длиннофокусным объективом. При этом параметр (F/N), где N - размер диагонали датчика телевизионного изображения (мм), F - фокусное расстояние объектива (мм), для одного телевизионного канала отличается от этого параметра для другого телевизионного канала, обеспечивая возможность отображения на дисплее блока индикации синхронизированных по времени изображений общего плана и изображений крупного плана контролируемого участка. При этом оптические оси объективов параллельны друг другу и оси радиолокационного измерительного модуля.
Для выбора параметров видеокамер и объективов обоих телевизионных каналов условие:

является оптимальным,
где N1, N2 - размер диагонали датчика телевизионного изображения первой и второй видеокамер (мм) соответственно,
F1, F2 - фокусное расстояние первого и второго объективов (мм) соответственно.
Недостатком прототипа, при использовании микроволнового радара в качестве измерительного блока, является сложность однозначной безошибочной идентификации цели-нарушителя в случае, когда в поле зрения обеих видеокамер находится одна цель. Боковые лепестки диаграммы направленности антенны радара могут дать ложное измерение наибольшей скорости, поскольку эта скорость может принадлежать другой цели, той, которая вышла за пределы поля зрения видеокамер, но по-прежнему, находится в поле зрения боковых лепестков радара. Таким образом, измеренная скорость не будет принадлежать той цели, изображение которой находится на экране. В результате, анализ двух стоп-кадров, предусмотренный в конструкции прототипа, полученных в один и тот же момент времени с помощью двух видеокамер (широкоугольной и длиннофокусной), может дать ошибочный результат при наличии одной цели в поле зрения видеокамер. При наличии на экране нескольких целей использование одной пары стоп-кадров, снятых одновременно, в принципе не дает возможности однозначно идентифицировать цель.
В результате, часть измерений может оказаться недостоверной по двум причинам:
- из-за наличия боковых лепестков у антенны радара,
- из-за предоставленной оператору возможности сколь-угодно длительного анализа произвольно выбранной из зафиксированного сюжета пары стоп-кадров.
В основу изобретения поставлена задача расширения арсенала средств, а также исключения ошибок идентификации цели-нарушителя в движущемся потоке транспортных средств и создание нового радиолокационного видеофиксирующего измерителя скорости транспорта, позволяющего производить измерения с большей достоверностью.
Поставленная задача решается тем, что радиолокационный видеофиксирующий измеритель скорости транспортных средств имеет в своем составе, соединенные с блоком обработки информации, блок управления, блок памяти, радиолокационный измерительный модуль, блок индикации с дисплеем и два телевизионных канала, содержащих видеокамеры с объективами, имеющими различные фокусные расстояния и отличный друг от друга параметр (F/N), где N - размер диагонали датчика телевизионного изображения, F - фокусное расстояние объектива, выполненные с обеспечением возможности отображения на дисплее блока индикации синхронизированных по времени стоп-кадров изображений общего плана и крупного плана контролируемого участка и записи в блок памяти видеосюжета в виде последовательности стоп-кадров. От прототипа измеритель отличается тем, что дополнительно снабжен программно-аппаратным модулем-таймером, функционально соединенным с блоком обработки информации, блоком индикации и блоком памяти программно-логическим оператором пакета прикладных программ с обеспечением возможности циклического воспроизведения на дисплее блока индикации непрерывной последовательности кадров записанного в блок памяти видеосюжета в прямом и обратном направлении от выбранного центрального стоп-кадра не менее чем по 3 кадра в каждом направлении, с возможностью кратковременной остановки циклического воспроизведения на время, ограниченное таймером, для просмотра остановленного стоп-кадра и детализации изображения контролируемого участка в фиксированный момент записи.
Технический результат, достигаемый изобретением, заключается в повышении достоверности отбора цели-нарушителя и точности результатов измерений, за счет циклического повторения последовательности кадров выбранного сюжета с нарушением, представляющей поведение цели-нарушителя на протяжении выбранного временного промежутка (в динамике) в сопоставлении с движением остальных участников транспортного потока, с принудительным переключением в режим циклического просмотра видеосюжета при остановке оператором одного стоп-кадра видеосюжета для более детального просмотра деталей в фиксированный момент записи.
Вышеуказанный технический результат достигается также применением способа определения цели-нарушителя, реализуемым устройством по изобретению. Способ фиксации цели-нарушителя в транспортном потоке согласно изобретению включает наблюдение за транспортным потоком по дисплею блока индикации в режиме ТВ-трансляции, измерение параметров движения транспортных средств радиолокационным измерительным модулем с отображением результатов измерений на дисплее блока индикации и обеспечением возможности сохранения результатов измерений и видеозаписи последовательности кадров видеосюжета за время измерений в блок памяти, определение цели-нарушителя на основе сопоставительного анализа измеренных параметров движения и зафиксированного изменения положения участников транспортного потока друг относительно друга за время измерений в режиме просмотра на дисплее блока индикации сохраненных в блоке памяти стоп-кадров, и отличается при этом от прототипа тем, что на этапе определения цели-нарушителя просмотр в полноэкранном режиме осуществляют в виде циклического воспроизведения полной записи видеосюжета и/или фрагмента видеосюжета в виде непрерывной последовательности кадров записанного в блок памяти видеосюжета в прямом и обратном направлении от выбранного центрального стоп-кадра не менее чем по 3 кадра в каждом направлении, с обеспечением возможности кратковременной остановки воспроизведения на время, ограниченное программно-аппаратным модулем-таймером, для просмотра остановленного текущего стоп-кадра с возможностью детализации изображения в фиксированный момент записи, с последующим возобновлением воспроизведения последовательности кадров до момента принудительной остановки воспроизведения видеосюжета при передачи сигнала от блока управления на блок обработки информации и записи отобранных фрагментов видеосюжета в архив блока памяти.
Процесс определения цели происходит в несколько этапов.
Первый этап: ТВ-трансляция.
В этом режиме оператор наводит прибор на контролируемый участок дороги, осуществляет простое наблюдение за транспортным потоком по дисплею блока индикации, на который осуществляется вывод телевизионного сигнала, передаваемого от видеокамер, и производит настройку аппаратуры (параметры изображения, порог и дальность измерения скорости и т.п.).
Второй этап: Измерение.
Блок обработки информации запускает режим «измерение» при нажатии на курок или полученном сигнале блока управления. При этом происходит автоматическая видеозапись сюжета с помощью двух видеокамер с одновременным измерением скорости цели и иных параметрах движения. Информация о скорости, времени, дате и месте фиксации заносится в память прибора и отображается на экране.
Видеозапись сюжета и результатов измерений на этапе измерений может быть записана в оперативную память блока памяти радиолокационного видеофиксирующего измерителя.
Третий этап: Просмотр.
Прибор переходит в режим «просмотр» автоматически при остановке курком или сигналом от блока управления процесса измерения. Режим предназначен для анализа и оценки записанной дорожной ситуации с целью выявления и идентификации цели-нарушителя правил дорожного движения. В режиме «просмотр» выключаются видеокамеры и радиолокационный измерительный модуль, а снятый оператором сюжет в виде мультиэкранного изображения выводится на экран, например, в виде одновременного показа на экране «мозаики» из нескольких, например девяти, кадров снятого сюжета. Выбор оператором одного из кадров мультиэкранного изображения переводит прибор в полноэкранный режим просмотра. Снятый сюжет (или его фрагмент определенной длительности) автоматически замедленно реверсивно (в прямом и обратном направлении) демонстрируется на экране дисплея, обеспечивая, таким образом, возможность детального анализа дорожной обстановки в динамике. В том числе, и такой ситуации, когда в конце сюжета цель выехала за пределы зоны видимости видеокамеры, но продолжает оставаться в поле зрения радара. Таким образом, оператору на аппаратном уровне запрещено использовать результаты, полученные в один фиксированный момент времени, для анализа ситуации, развивающейся во времени. Длительность анализируемого сюжета зависит от объема памяти, от скорости цели, а также от установленной скорости видеозаписи.
Заявляемый радиолокационный видеофиксирующий измеритель скорости транспорта и способ определения цели-нарушителя иллюстрируется приведенными ниже примером реализации, а также схемами, представленными на фигурах 1 и 2.
Фиг.1 - блок-схема измерителя
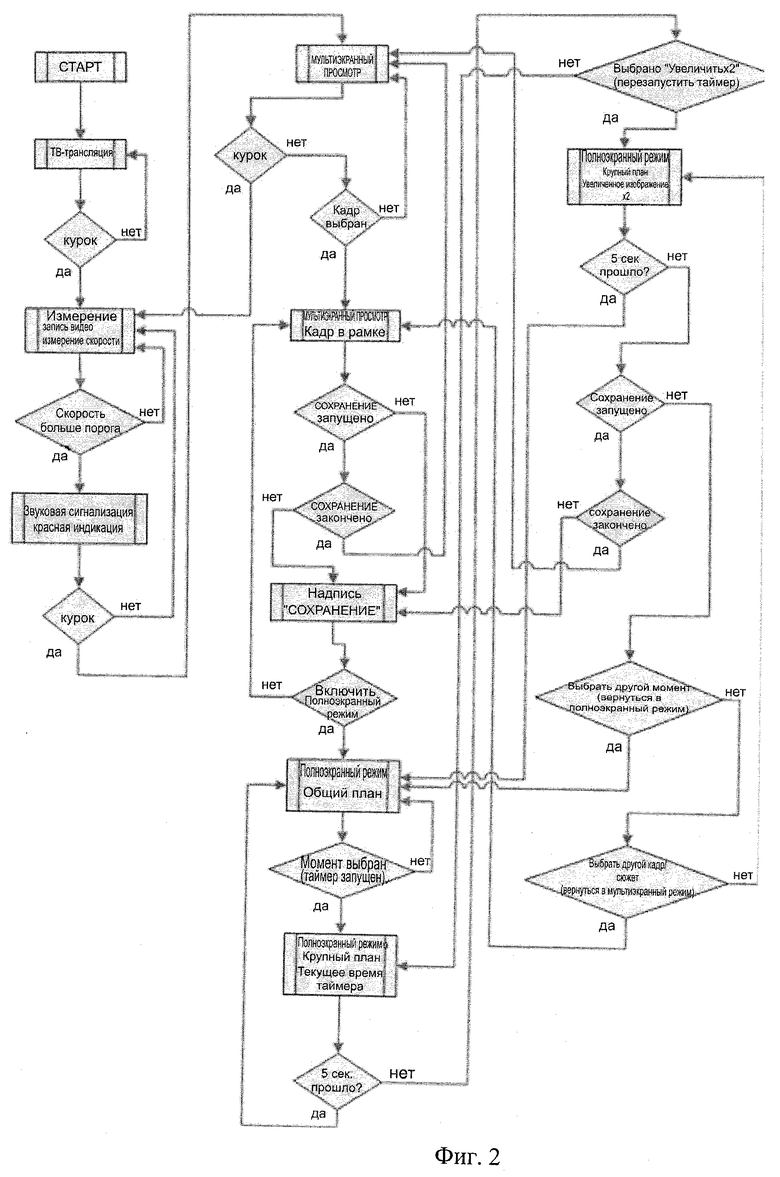
Фиг.2 - блок-схема алгоритма взаимодействия блоков измерителя.
В состав измерителя (фиг.1) входят: радиолокационный измерительный модуль 1, например, работающий на частотах, используемых в дорожных радарах ГИБДД (Х-диапазон: 10.525 ГГц + 25 МГц; К-диапазон: 24.15 ГГц +/- 100 МГц или иных разрешенных частотах); первая видеокамера 2 с установленным на ней первым длиннофокусным объективом 3, которые образуют первый телевизионный канал; и вторая видеокамера 4, с установленным на ней вторым длиннофокусным объективом 5, которые образуют второй телевизионный канал. Локационный измерительный модуль 1, обе видеокамеры 2, 4 соединены с блоком 6 обработки информации с помощью линий связи. Блок 8 памяти, таймер 10 и блок 9 управления соединены с блоком 6 обработки информации, при этом блок 8 памяти и блок 9 управлении, так же как и блок индикации 7 соединены с таймером 10.
Рассмотрим частный случай, когда объем памяти блока памяти 8 рассчитан на запись видеосюжетов длительностью не более 32 сек, а скорость записи может составлять 2, 4 или 8 кадров в сек. Порядок взаимодействия блоков представлен на Фиг.2.
После включения прибор находится в режиме «ТВ-трансляция». Нажатие на курок, соединенный с блоком управления 9, приводит к переходу в режим «Измерение», в котором радиолокационный измерительный модуль 1 начинает выдавать результаты измерения самой быстрой цели из тех, что находятся в поле зрения радара. Одновременно с этим начинается видеозапись в блок памяти, которая производится с помощью двух видеокамер 2 и 4 с объективами 3 и 5 соответственно. В случае, если скорость превышает установленный порог, блок 6 обработки информации обеспечивает выдачу оператору на блок 7 индикации звуковой и цветовой сигнализации.
Повторное нажатие на курок переключает прибор в режим «Просмотр», а именно мультиэкранный просмотр. Этот режим реализован программно-аппаратным образом и обеспечивается соответствующей работой блока 8 памяти совместно с блоком 6 обработки информации и блоком 7 индикации. На экран выводится одновременно девять стоп-кадров изображений, снятых видеокамерой 4. Если оператор не пытается сохранить весь отснятый сюжет (длительностью 32 сек), то ему предоставляется возможность выбрать центральный стоп-кадр анализируемой ситуации и перейти в полноэкранный режим. Переход в этот режим осуществляется нажатием на выбранный стоп-кадр мультиэкранного изображения на блоке индикации 7. После получения команды на выбор нужного фрагмента блок 9 управления посылает команду на блок 6 обработки информации, который переводит блок 7 индикации в режим полноэкранного отображения выбранного фрагмента. Выбранный стоп-кадр является центральным в том видеосюжете, который отображается на блоке 7 индикации. С момента выбора нужного фрагмента прибор переходит в полноэкранный режим и отображает на экране со скоростью 1 кадр/сек последовательно 7 (или 11, или 15, в зависимости от скорости записи) отснятых кадров. Демонстрация ведется реверсивно (непрерывно в прямом, затем в обратном направлении), что позволяет оператору многократно, объективно и обоснованно провести анализ развития дорожной обстановки. В результате такого анализа выявляется цель, скорость которой, судя по анализируемым изображениям, в данном видеосюжете выше остальных. Дальнейшие действия оператора (и обеспечивающие их аппаратные возможности прибора) направлены на точную идентификацию нарушителя, для которого необходимо визуальное распознавание государственного номерного знака. Для этой цели оператор выбирает момент в просматриваемом сюжете и посредством команды блоку 9 управления дает сигнал на блок 8 памяти с тем, чтобы блок 7 индикации перешел к демонстрации увеличенного изображения. Одновременно блок 9 управления передает сигнал на программно-аппаратный модуль-таймер 10, и демонстрация видеозаписи приостанавливается, например, на 5 сек, блок 6 обработки информации выводит на блок 7 индикации информацию из блока 8 памяти в виде увеличенного изображения стоп-кадра, зафиксированного первой видеокамерой 2. В течение 5 секунд оператор принимает решение о пригодности выведенного изображения для визуальной идентификации номерного знака, после чего программно-аппаратный модуль-таймер 10 вновь переключает прибор в режим реверсивной демонстрации выбранного сюжета. Если необходимо выбрать иной, более четкий фрагмент сюжета, оператор может это сделать, повторив вышеуказанные процедуры. Особенностью данного способа анализа изображения является полное информирование оператора о развитии дорожной обстановки в динамике и невозможность использования части полученной информации (отдельного стоп-кадра) для ее ошибочной трактовки. После завершения анализа сюжет может быть сохранен в архиве блока 8 памяти для дальнейшей обработки посредством выдачи соответствующей команды блоку 9 управления.
В общем случае, оптические свойства прибора могут обеспечивать повышенную дальность различения номерного знака транспортного средства. В этом случае может потребоваться больший объем оперативной памяти блока 8 памяти с тем, чтобы обеспечить длительность записи более 32 сек. Скорость видеозаписи, обеспечиваемой блоком 8 обработки информации, в этом случае также должна отличаться от указанных в конкретной реализации 2, 4 или 8 кадров/сек. Для анализа в таком случае можно будет использовать более длительные сюжеты, а увеличение частоты кадров видеозаписи позволит производить фиксацию более быстрых целей. Такие возможности, с одной стороны, сделают анализ еще более достоверным, однако, с другой стороны, это может привести к неоправданному расходу аппаратных ресурсов, а также к значительному увеличению времени анализа.
Аналитические выражения, приведенные ниже, дают возможность сделать оптимальный выбор характеристик прибора при его настройке.
А. Выбор необходимой частоты кадров видеозаписи.
Достоверность оценки дорожной ситуации будет тем выше, чем меньший отрезок пути пройдет цель между моментами получения соседних кадров. Для высокоскоростных целей сокращение этого отрезка может быть достигнуто путем увеличения частоты кадров видеозаписи Fзап. В общем случае

где ΔD - отрезок пути, который проходит цель за время между моментами получения соседних кадров (м/кадр),
Vц - скорость цели (м/сек),
Fзап - частота кадров видеозаписи (кадр/сек).
Опытным путем установлено, что анализ дорожной обстановки удобно вести, если перемещение транспортного средства за время между моментами фиксации сопоставимо с размером самого транспортного средства, что соответствует примерной величине ΔD=5-10 м/кадр. Воспользуемся для расчетов средней величиной 7 м/кадр.
Определим необходимый для выполнения этого условия диапазон для частоты кадров видеозаписи, который должен быть обеспечен прибором.
Разобьем диапазон возможных измеряемых скоростей на три поддиапазона (по различным дорожным условиям).
1. Скорость нарушителя находится в пределах 20÷60 км/час (5.6÷16.7 м/сек) (особые условия движения в пределах населенных пунктов: при ремонте дорог, вблизи детских учреждений и т.п.).
2. Скорость нарушителя находится в пределах 60÷120 км/час (16.7÷33.4 м/сек) (условия городских и загородных дорог).
3. Скорость нарушителя находится в пределах 120-250 км/час (33.4÷66.8 м/сек) (скоростные магистрали).
Воспользуемся для расчетов средними цифрами.
Для первого поддиапазона Vц≈40 км/ч. Тогда из выражения (1) получаем Fзап1=1.6 кадр/сек, устанавливаем 2.
Для второго поддиапазона Vц≈90 км/ч. Тогда из выражения (1) получаем Fзап2=3.6 кадр/сек, устанавливаем 4.
Для третьего поддиапазона Vц≈185 км/ч. Тогда из выражения (1) получаем Fзап3=7.3 кадр/сек, устанавливаем 8.
Таким образом, получены обоснованные значения для частоты кадров записи видеосюжетов, необходимые для достоверной оценки дорожной обстановки. Переключение частоты кадров может производиться как вручную оператором, в зависимости от дорожных условий (см. приведенную выше классификацию), так и автоматически, в зависимости от скорости цели.
Б. Определение необходимого количества кадров в демонстрируемом реверсивном сюжете.
Для достоверной оценки дорожной обстановки реверсивная демонстрация записанных видеосюжетов должна содержать различное количество видеокадров при различных скоростях фиксируемых целей. При этом наибольшее число кадров в сюжете должно демонстрироваться при анализе движения цели с максимальной скоростью.
Время Т (с), в течение которого может анализироваться движение конкретной цели, определяется выражением

где Dк - протяженность зоны контроля, необходимой для выявления нарушителя (м),
Vц - скорость цели (м/с).
Тогда, учитывая (2), количество кадров Q (кадр) в демонстрируемом сюжете

Используя средние значения скоростей для трех поддиапазонов и полученные опытным путем значения для величины зоны контроля, получим следующие оценки.
В поддиапазоне 1 (ср. скорость ≈40 км/час) для контроля достаточно около 45 м, тогда из выражения (4) при Vзап=2 кадр/сек следует Q1=8 кадров.
В поддиапазоне 2 (ср. скорость ≈90 км/час) для контроля достаточно около 75 м, и тогда из выражения (4) при Vзап=4 кадр/сек следует Q2=12 кадров.
В поддиапазоне 3 зоной контроля является отрезок дороги около 100 м (ср. скорость ≈185 км/час), тогда при Vзап=8 кадр/сек получим Q3=15.5 кадров. Для выполнения условий симметрии (относительно выбранного момента времени) при просмотре сюжетов из эргономических соображений приняты ближайшие к расчетным нечетные значения Q (Q1=7, Q2=11, Q3=15).
В. Выбор длительности записи видеосюжета.
Объем оперативной памяти выбирается таким образом, чтобы обеспечить непрерывное слежение за целью, двигающейся с минимальной скоростью Vмин (м/с) в поле зрения прибора до сигнала об остановке по команде оператора. Учитывая, что оптические свойства прибора позволяют различить номерной знак на предельном расстоянии Dпред(м), получим длительность записи видеосюжета Тзап.(с):

Для рассматриваемого частного случая Dпред≈200 м, Vмин=20 км/час (5.6 м/сек), поэтому в соответствии с выражением (5) Тзап.=36 сек. С учетом необходимого запаса времени на торможение и остановку, в предлагаемом приборе обеспечена возможность записи дорожной обстановки в течение 32 сек.
Таким образом, с целью предотвращения возможности ошибочного анализа дорожной обстановки в предлагаемом приборе используется усовершенствованный механизм работы в режиме «просмотр», обеспечивающий автоматическую (независимо от желания оператора) реверсивную замедленную демонстрацию зарегистрированного видеосюжета, записанного с помощью имеющихся двух телевизионных каналов, каждый из которых состоит из объектива и видеокамеры.
Особенность данного решения заключается в том, что для анализа записанного видеоизображения оператору предоставлена возможность приостановить демонстрацию видеосюжета (и увеличить изображение) не более чем на 5 сек, после чего реверсивная демонстрация вновь автоматически возобновляется. Наличие видеозаписи дорожной обстановки, на которой можно проследить развитие всей ситуации в динамике, а также невозможность длительной демонстрации стоп-кадров, произвольно выбранных из видеосюжета, исключает возможность ошибочной трактовки дорожной ситуации и позволяет однозначно идентифицировать измеряемый объект.
Выбор скорости и частоты видеозаписи, определение размера реверсивного сюжета, а также обоснованный выбор длительности видеосюжета, в соответствии с соотношениями (1)-(5), влияющие в конечном итоге на выбор объема оперативной памяти, позволяет обеспечить оптимальный выбор необходимых аппаратных ресурсов прибора, обеспечив при этом повышение достоверности измерений.
Ограничение возможного времени приостановки анализируемой видеозаписи в сочетании с правильно выбранным соотношением количества кадров реверсивного просмотра Q и частоты кадров видеозаписи Fзап (выражении (4)) позволяет сделать обоснованный, достоверный и объективный вывод о принадлежности результата измерений именно той цели, которая во время проведения измерений устойчиво находилась в главном лепестке поля излучения антенны радиолокатора.
Радиолокационный видеофиксирующий измеритель скорости транспорта может быть выполнен в виде заключенного в корпус прибора, содержащего, помимо указанных на схеме фиг.1, элементов встроенный аккумуляторный блок питания с зарядным устройством, а также монтажные элементы для крепления рукоятки с встроенным дополнительным аккумулятором. Эти элементы также используются для крепления прибора на штативе.
При этом локационный измерительный модуль 1 может быть закреплен на передней панели устройства. На той же панели жестко зафиксированы объективы 3 и 5. К конструктивным элементам объективов присоединены видеокамеры 2 и 4 соответственно. Конструкцией крепления и жесткостью передней панели обеспечивается строгая параллельность оптических осей объектива 3, объектива 5 и оси измерительного модуля 1.
Блок 7 индикации, выполненный, например, в виде жидкокристаллического дисплея, и блок 9 управления конструктивно выполнены в виде задней панели прибора, причем для управления имеются как специальные кнопки на панели, так и изображения кнопок на сенсорном дисплее, отображающем видео и цифровую информацию. Может также использоваться блок дистанционного управления (на Фиг.1 не указан). В качестве дополнительного элемента блока 9 управления используется внешний курок, расположенный на корпусе (на фиг.1 не указан). В качестве локационного измерительного модуля могут использоваться, например, лазерные локаторы или радиолокаторы. На задней панели также может быть размещен и блок 8 памяти для хранения видеосюжетов и данных о зафиксированных целях, выполненный, например, в виде энергонезависимой памяти (SD-карта).
Блок 6 обработки информации и таймер 10 выполнены на базе микропроцессора.
Реализованный по заявляемому изобретению измеритель позволяет производить измерения скорости в диапазоне 20-250 км/час при предельной дальности измерений не менее 200 м и может найти применение в работе дорожно-патрульной службы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО КОНТРОЛЯ ДОРОЖНОГО ДВИЖЕНИЯ И СИСТЕМА, ЕГО РЕАЛИЗУЮЩАЯ | 2021 |
|
RU2760058C1 |
| КОМПЛЕКС ВИДЕОФИКСАЦИИ И ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ И КООРДИНАТ ТРАНСПОРТНЫХ СРЕДСТВ | 2013 |
|
RU2539676C2 |
| МНОГОЦЕЛЕВОЙ МНОГОПОЛОСНЫЙ ЛАЗЕРНЫЙ ИЗМЕРИТЕЛЬ ПАРАМЕТРОВ ДВИЖЕНИЯ ТРАНСПОРТА С ВИДЕОФИКСАЦИЕЙ | 2017 |
|
RU2658120C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА ВЫЯВЛЕНИЯ НАРУШЕНИЙ ПРАВИЛ ДОРОЖНОГО ДВИЖЕНИЯ ПРИ ПРОЕЗДЕ ПЕРЕКРЕСТКА, ЖЕЛЕЗНОДОРОЖНОГО ПЕРЕЕЗДА ИЛИ ПЕШЕХОДНОГО ПЕРЕХОДА | 2015 |
|
RU2587662C1 |
| СПОСОБ ИЗМЕРЕНИЯ ГАБАРИТНОЙ ДЛИНЫ ТРАНСПОРТНЫХ СРЕДСТВ, СПОСОБ ИЗМЕРЕНИЯ РАССТОЯНИЯ МЕЖДУ НИМИ И УСТРОЙСТВО ДЛЯ ИХ РЕАЛИЗАЦИИ | 2014 |
|
RU2567440C1 |
| МАЛОКАДРОВАЯ СИСТЕМА ВИДЕОНАБЛЮДЕНИЯ ДЛЯ КОНТРОЛЯ ПРОТЯЖЕННЫХ РУБЕЖЕЙ ОХРАНЫ | 2012 |
|
RU2517042C2 |
| УСТРОЙСТВО ВИДЕОНАБЛЮДЕНИЯ | 2012 |
|
RU2510960C2 |
| КОМПЛЕКС ТЕХНИЧЕСКОГО НАБЛЮДЕНИЯ ЗА ОХРАНЯЕМОЙ ТЕРРИТОРИЕЙ | 2013 |
|
RU2542873C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ И СКОРОСТИ ДВИЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА НА ДОРОГЕ И КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2559418C2 |
| Способ фиксации нарушений Правил дорожного движения | 2023 |
|
RU2806291C1 |
Группа изобретений относится к области регулирования и контроля движения дорожного транспорта и предназначена для обнаружения и видеофиксации нарушений правил дорожного движения транспортным средством, в том числе для видеофиксации транспортных средств, превышающих скорость. Реализуется циклическое повторение последовательности кадров выбранного сюжета с нарушением, представляющей поведение цели-нарушителя на протяжении выбранного временного промежутка в сопоставлении с движением остальных участников транспортного потока. Осуществляется принудительное переключение в режим циклического просмотра видеосюжета при остановке оператором одного стоп-кадра видеосюжета для более детального просмотра деталей в фиксированный момент записи. В состав измерителя входят: радиолокационный измерительный модуль (1); первая видеокамера (2) с установленным на ней первым длиннофокусным объективом (3), которые образуют первый телевизионный канал; вторая видеокамера (4) с установленным на ней вторым длиннофокусным объективом (5), которые образуют второй телевизионный канал. В состав измерителя также входят блок (6) обработки информации (микропроцессор) с программно-аппаратным модулем-таймером (10), блок индикации (7) (например, жидкокристаллический дисплей), блок памяти (8) и блок управления (9), которые обеспечивают автоматическую реверсивную замедленную демонстрацию при просмотре записанного видеосюжета, ограничивая при этом время его приостановки. Возможность настройки скорости и частоты видеозаписи, размера реверсивного сюжета, а также длительности видеосюжета обеспечивает оптимальный выбор необходимых аппаратных ресурсов прибора и способствует повышению достоверности измерений. Технический результат заключается в повышении достоверности отбора цели-нарушителя и точности результатов измерений. 2 н. и 8 з.п. ф-лы, 2 ил.
1. Радиолокационный видеофиксирующий измеритель скорости движения транспорта, имеющий в своем составе соединенные с блоком обработки информации блок управления, блок памяти и радиолокационный измерительный модуль, а также блок индикации с дисплеем и два телевизионных канала, содержащих видеокамеры с объективами, имеющими различные фокусные расстояния и отличный друг от друга параметр (F/N), где N - размер диагонали датчика телевизионного изображения, F - фокусное расстояние объектива, выполненные с обеспечением возможности отображения на дисплее блока индикации синхронизированных по времени стоп-кадров изображений общего плана и крупного плана контролируемого участка и записи в блок памяти видеосюжета в виде последовательности стоп-кадров, отличающийся тем, что дополнительно снабжен программно-аппаратным модулем-таймером, функционально соединенным с блоком обработки информации, блоком индикации и блоком памяти программно-логическим оператором пакета прикладных программ с обеспечением возможности циклического воспроизведения на дисплее блока индикации непрерывной последовательности кадров записанного в блок памяти видеосюжета в прямом и обратном направлениях от выбранного центрального стоп-кадра не менее чем по 3 кадра в каждом направлении, с возможностью кратковременной остановки циклического воспроизведения на время, ограниченное таймером, для просмотра остановленного стоп-кадра и детализации изображения контролируемого участка в фиксированный момент записи.
2. Измеритель по п.1, отличающийся тем, что блок обработки информации дополнительно содержит аппаратную настройку частоты кадров видеозаписи параметры которой выбирают из соотношения
Fзап=Vц/ΔD,
где ΔD - отрезок пути, который проходит цель за время между соседними моментами фиксации, м/кадр;
Vц - скорость цели, м/сек;
Fзап - частота кадров видеозаписи, кадр/сек.
3. Измеритель по п.2, отличающийся тем, что воспроизведение сюжета на дисплее блока индикации производят реверсивно, а блок обработки информации выполнен с обеспечением возможности выбора количества кадров Q в воспроизводимой на дисплее блока индикации последовательности кадров движения цели из соотношения
Q=Dк·Fзап/Vц,
где Dк - протяженность зоны контроля, необходимой для выявления нарушителя, м;
Fзап - частота кадров видеозаписи, кадр/с;
Vц - скорость цели, м/с.
4. Измеритель по любому из пп.1-3, отличающийся тем, что блок обработки информации выполнен с обеспечением возможности выбора длительности записи видеосюжета для непрерывного слежения за целью из соотношения
Тзап.=Dпред/Vмин,
где Тзап. - длительность записи видеосюжета, с;
Dпред - предельное расстояние, на котором оптические свойства прибора позволяют различить номерной знак, м;
Vмин - минимальная скорость движения цели, м/с.
5. Способ определения цели-нарушителя в транспортном потоке, включающий наблюдение за транспортным потоком по дисплею блока индикации в режиме ТВ-трансляции, измерение параметров движения транспортных средств радиолокационным измерительным модулем с отображением результатов измерений на дисплее блока индикации и обеспечением возможности сохранения результатов измерений и видеозаписи последовательности кадров видеосюжета за время измерений в блок памяти, определение цели-нарушителя на основе сопоставительного анализа измеренных параметров движения и зафиксированного изменения положения участников транспортного потока друг относительно друга за время измерений в режиме просмотра на дисплее блока индикации сохраненных в блоке памяти стоп-кадров, отличающийся тем, что на этапе определения цели-нарушителя просмотр в полноэкранном режиме осуществляют в виде циклического воспроизведения полной записи видеосюжета и/или фрагмента видеосюжета в виде непрерывной последовательности кадров записанного в блок памяти видеосюжета в прямом и обратном направлениях от выбранного центрального стоп-кадра не менее чем по 3 кадра в каждом направлении, с обеспечением возможности кратковременной остановки воспроизведения на время, ограниченное программно-аппаратным модулем-таймером, для просмотра остановленного текущего стоп-кадра с возможностью детализации изображения в фиксированный момент записи, с последующим возобновлением воспроизведения последовательности кадров до момента принудительной остановки воспроизведения видеосюжета при передачи сигнала от блока управления на блок обработки информации и записи отобранных фрагментов видеосюжета в архив блока памяти.
6. Способ по п.5 отличающийся тем, что воспроизведение сюжета на дисплее блока индикации производят замедленно.
7. Способ по п.5, отличающийся тем, что осуществляют дополнительно настройку частоты кадров видеозаписи, параметры которой выбирают из соотношения
Fзап=Vц/ΔD,
где Fзап - частота кадров видеозаписи, кадр/с;
Vц - скорость цели, м/с;
ΔD - отрезок пути, который проходит цель за время между соседними моментами фиксации, м/кадр.
8. Способ по п.5, отличающийся тем, что осуществляют настройку количества кадров Q в воспроизводимой последовательности кадров фрагмента видеосюжета движения цели из соотношения
Q=Dк·Fзап/Vц,
где Dк - протяженность зоны контроля, необходимой для выявления нарушителя,м;
Fзап - частота кадров видеозаписи, кадр/с;
Vц - скорость цели, м/с.
9. Способ по п.5, отличающийся тем, что осуществляют настройку длительности записи видеосюжета с обеспечением возможности непрерывного слежения за целью, двигающейся с минимальной скоростью, из соотношения
Тзап.=Dпред/Vмин,
где Тзап - длительность записи видеосюжета, с;
Dпред - предельное расстояние на котором оптические свойства прибора позволяют различить номерной знак, м;
Vмин - минимальная скорость движения цели, м/с.
10. Способ по любому из пп.5-9, отличающийся тем, что на этапе измерений результаты измерений и видеосюжет записывают в оперативную память блока памяти измерителя.
| Гидравлический пресс автоматического действия для штамповки галош и иных изделий | 1948 |
|
SU83644A1 |
| АППАРАТ ДЛЯ СШИВАНИЯ КРОВЕНОСНЫХ СОСУДОВ | 1947 |
|
SU71792A1 |
| Устройство для непрерывного брожения теста и т.п. продуктов | 1946 |
|
SU68741A1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОБНАРУЖЕНИЯ НАРУШЕНИЙ ДОРОЖНОГО ДВИЖЕНИЯ С ДИНАМИЧЕСКИМИ СИСТЕМАМИ НАВЕДЕНИЯ | 1997 |
|
RU2175780C2 |

