Изобретение относится к способу и электронному устройству для контроля состояния деталей рельсового транспортного средства, при котором используются датчики для регистрации воздействующих на детали нагрузок, измеренные значения которых в качестве входных значений подаются к блоку обработки для анализа состояния износа, причем для этого посредством обработки сигналов определяется текущее местоположение рельсового транспортного средства. Кроме того, изобретение относится также к находящемуся в связи с этим компьютерному программному продукту.
При движении рельсовых транспортных средств все больше используется систем диагностики и контроля, в которых регистрируются, обрабатываются и записываются в память самые различные измеряемые параметры. Среди прочего сегодня помимо необходимой для эксплуатации рельсового транспортного средства регистрации измеряемых параметров приводной и тормозной систем, таких как скорости, давления, токи и напряжения, регистрируются и записываются в память все больше измеренных значений для диагностики отдельных подсистем и компонентов. При этом помимо обеспечения требуемой функциональности следует лучше оценивать состояние износа деталей, чтобы можно было лучше их использовать в течение срока службы.
Рельсовое транспортное средство не следует рассматривать при его эксплуатации как замкнутую систему, поскольку на него постоянно оказывает влияние взаимодействие с соответствующим участком пути. За счет регистрации различных измеряемых параметров в транспортном средстве, например температур и ускорений, можно также сделать вывод об окружающих условиях и, разумеется, о состоянии участка пути, в частности сцеплении в месте контакта колеса и рельса или повреждениях рельса. Знание местоположения и, тем самым, соответствие определенной точке участка пути при этом непосредственно предполагаются. Для этого в настоящее время требуются дополнительные приборы, которые дают необходимую информацию о местоположении.
Из документа DE 10233527 В4 известен способ диагностики состояния и контроля деталей рельсового транспортного средства, а именно направляющих устройств для колесных пар, при котором за счет обработки текущего измеренного сигнала ускорения и его двукратного интегрирования осуществляется оценка сигнала пути. Этот сигнал пути используется затем в качестве параметра состояния для описания координаты текущего пространственного положения соответствующей колесной пары относительно других деталей.
В документе ЕР 0795454 А1 раскрыт способ самопеленгации рельсового транспортного средства, который основан на корреляции полученных в зависимости от места спектров ускорения текущей и более ранней поездок. При этом спектры ускорения представляют собой специфический для пройденного участка пути и определенного транспортного средства вибропрофиль этого участка, который сохраняется во внутренней базе данных в виде эталонной памяти и коррелируется с текущими измеренными спектрами ускорения для определения местоположения рельсового транспортного средства.
В документе DE 60118501 D2 раскрыты способ и устройство для пеленгации рельсового транспортного средства, в которых определяется его скорость на рельсовом пути в разные моменты времени и на основе расчета по специальному алгоритму с помощью базы данных - текущее местоположение рельсового транспортного средства. При этом в базе данных помимо геометрических признаков хранятся другие данные, которые были записаны путем измерения величины инерции при предыдущем прохождении пути транспортным средством.
В документе DE 19836081 А1 раскрыто техническое решение по раннему обнаружению повреждений рельсовых транспортных средств. Этот контроль состояния основан на анализе необычных шумов или колебаний, которые предвещают повреждения рельсового транспортного средства. Подверженные особым нагрузкам детали, такие как колесные пары, контролируются датчиками. Последние вырабатывают текущие значения шума и колебаний, которые сравниваются с соответствующими эталонными значениями на предмет того, лежат ли они в заданных пределах. Эти эталонные значения хранятся в эталонной памяти и предварительно определялись для тех точек участка пути, в которых они возникли до этого. Чтобы создать отношение между текущими значениями шума и колебаний и соответствующими эталонными значениями, последние многократно запрашиваются, а именно всегда тогда, когда датчики компонентов транспортного средства проходят соответствующую точку участка пути и вырабатывают текущие сообщения. Соотнесение текущих сигналов датчиков соответствующим эталонным значениям осуществляется посредством считывающих стрелок, которые предварительно включаются в соответствии с продвижением транспортного средства по участку пути.
В уровне техники для получения информации о местоположении прибегают к дополнительным приборам, таким как GPS-приемники.
Недостаток этого уровня техники заключается в том, что GPS-приемник имеется в рельсовом транспортном средстве не всегда и даже при его наличии не всегда вырабатывает приемлемый сигнал, например при проездах туннелей, которые в горных местностях могут занимать длинные участки пути. Кроме того, во многих дорожных сетях, например метро, существуют, будучи обусловлены системой, лишь ограниченные возможности передачи и приема, и, тем самым, GPS-пеленгация может использоваться лишь очень ограниченно.
Для устранения этой проблемы в общем уровне техники известна также другая возможность определения текущего местоположения рельсового транспортного средства, при которой встроенные непосредственно в участок пути позиционные датчики индуктивного действия передают рельсовому транспортному средству информацию об определенных точках пути.
Однако также это техническое решение связано с дополнительными затратами на приборы, которые следует планировать при проектировании рельсового транспортного средства и участка пути.
Задачей изобретения является создание способа и электронного устройства для контроля состояния деталей, получение данных о местоположении которых происходит простым образом и надежно.
Эта задача решена посредством способа, охарактеризованного признаками п.1 формулы изобретения. В отношении соответствующего электронного устройства следует сослаться на п.6.
Изобретение включает в себя то технологическое решение, что текущая скорость v рельсового транспортного средства записывается по времени t, на основе чего создается v-t-профиль, который коррелируется с хранящимся в памяти v-t-профилем, чтобы за счет стохастического сравнения обоих профилей определить текущее местоположение рельсового транспортного средства для контроля его состояния. При этом корреляция осуществляется целесообразно с хранящимся в памяти v-t-профилем в виде профиля участок пути/остановки.
Другими словами, принципиальная идея изобретения заключается, следовательно, в том, чтобы за счет корреляции профиля скорости с профилем участок пути/остановки определить местоположение.
Преимущество предложенного решения заключается в частности в том, что для контроля состояния и анализа состояния износа деталей и участка пути не требуется никаких дополнительных технических приборов для подачи данных о местоположении на блок обработки. Напротив, информацию о местоположении получают исключительно с помощью техники обработки сигналов, т.е. вычисляют. Поскольку рельсовые транспортные средства движутся большей частью по постоянным участкам пути с постоянными остановками, можно вывести лежащие в основе изобретения критерии соотнесения. По профилю времени остановок, когда он накладывается на географическую карту, блок обработки может определить, на каком участке пути прошло рельсовое транспортное средство и когда и приблизительно где оно находилось, насколько часто оно замедлялось между остановками и где, например, на полотне дороги находятся места с плохим сцеплением. Время остановки соответствует местоположению остановки, в котором скорость равна нулю в течение установленной расписанием продолжительности пребывания на остановке. Это позволяет создавать базы данных, которые для контроля состояния могут обрабатываться простыми статистическими методами.
В рамках изобретения возможно также, что хранящемуся в памяти v-t-профилю назначаются другие, полученные посредством датчиков и воздействующие на детали нагрузочные данные. Так, в качестве дополнительных нагрузочных данных могут записываться воздействующие на колесные пары рельсового транспортного средства ускорения, чтобы за счет этого идентифицировать дефектные отрезки участка пути. Можно даже сделать прогноз о том, когда дефектный отрезок участка пути достигнет предела износа, и с помощью этой информации можно превентивно отремонтировать дефектные отрезки участка пути перед полным выходом из строя задолго до того, как потребуется сложный технический ремонт.
В соответствии с одной мерой усовершенствования изобретения предложено, что в качестве прибора записи текущей скорости рельсового транспортного средства по времени используется имеющийся в нем центральный регистратор данных. Этим достигается дальнейшее сокращение аппаратных затрат. Центральный регистратор данных рельсового транспортного средства предназначен для записи измеренных и вычисленных данных о нем вдоль их временной характеристики. Помимо этого предложено для контроля состояния сохранение используемого в целях сравнения профиля участок пути/остановки рельсового транспортного средства также в регистраторе данных или в блоке обработки. Профиль участок пути/остановки включает в себя в простейшем случае временную характеристику скорости рельсового транспортного средства на участке его движения в соответствии с действующим расписанием с учетом ограничений скорости на нем. Помимо этого можно также определить профиль участок пути/остановки посредством статистического анализа исторических измеренных v-t-профилей.
Другие меры усовершенствования изобретения более подробно поясняются ниже вместе с описанием предпочтительного варианта его выполнения со ссылкой на чертежи, на которых представлено следующее:
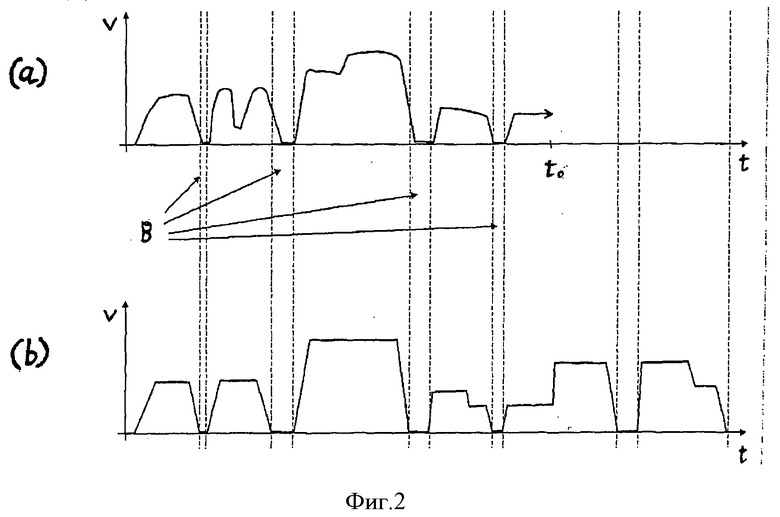
фиг.1 - блок-схема электронного устройства для контроля состояния;
фиг.2 - график сравнения v-t-профиля с хранящимся в памяти профилем участок пути/остановки рельсового транспортного средства.
На фиг.1 электронное устройство для контроля состояния деталей 1 рельсового транспортного средства (не показано) состоит, в основном, из нескольких датчиков 2а-2с, которые регистрируют воздействующие на детали 1 нагрузки. В качестве примера датчик 2а выполнен в виде датчика ускорения, который определяет толчки, воздействующие при движении на колесную пару в качестве детали 1.
Полученные измеренные значения подаются в качестве входных значений сначала к блоку записи 3, который получает текущую скорость v рельсового транспортного средства от его системы управления (не показана) и записывает по времени t. Блок 3 создает на этой основе v-t-профиль рельсового транспортного средства, который в качестве входного сигнала подается к подключенному блоку сравнения 4. Блок сравнения 4 получает от блока памяти 5 хранящийся в нем v-t-профиль в виде профиля участок пути/остановки рельсового транспортного средства, который был получен с помощью расписания движения на текущем участке пути. За счет стохастического сравнения обоих профилей определяются совпадения, которые блок 4 предоставляет в распоряжение подключенного блока обработки 6. Последний служит для контроля состояния и анализа состояния износа деталей 1.
Как показано на фиг.2, сравнение v-t-профиля а с профилем b участок пути/остановки происходит за счет того, что в обозначенных штриховыми линиями областях В определяются совпадения по времени t. Область В характеризует время остановки рельсового транспортного средства, когда скорость v равна нулю. Такое совпадение обоих профилей позволяет сделать вывод об эталонном профиле b, т.е. в каком месте рельсовое транспортное средство действительно находится в данный момент времени t0. Полученное местоположение может использоваться за счет блока обработки 6 для основанного на месте контроля состояния с включением полученных посредством датчиков 2а-2с измеренных значений.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ПОВОРОТНОЙ ТЕЛЕЖКИ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА, СОДЕРЖАЩЕЙ, ПО МЕНЬШЕЙ МЕРЕ, ОДНУ КОЛЕСНУЮ ПАРУ | 2010 |
|
RU2540362C2 |
| АВТОМАТИЗИРОВАННАЯ БОРТОВАЯ СИСТЕМА УПРАВЛЕНИЯ РЕЛЬСОВЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2019 |
|
RU2764078C1 |
| СПОСОБ КОРРЕКЦИИ ПОГРЕШНОСТЕЙ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2242392C2 |
| СПОСОБ ГЕНЕРАЦИИ РЕКОМЕНДАЦИЙ ДЛЯ ДЕЙСТВИЙ ВОДИТЕЛЯ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА ИЛИ УПРАВЛЯЮЩИХ СИГНАЛОВ ДЛЯ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА С ПОМОЩЬЮ СИСТЕМЫ ПОМОЩИ ВОДИТЕЛЮ И СИСТЕМА ПОМОЩИ ВОДИТЕЛЮ | 2013 |
|
RU2601970C2 |
| УСТРОЙСТВО ФОТОСЪЕМКИ ТОКОПРИЕМНИКА ПОСРЕДСТВОМ ОБРАБОТКИ ИЗОБРАЖЕНИЙ | 2010 |
|
RU2491182C2 |
| Бортовое устройство позиционирования рельсового транспортного средства | 2023 |
|
RU2799734C1 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2474507C2 |
| Устройство мониторинга и диагностики грузового вагона | 2020 |
|
RU2745168C1 |
| МОНИТОРИНГ НАГРУЗКИ НА КОМПЛЕКТУЮЩУЮ ДЕТАЛЬ В ПРОЦЕССЕ ЭКСПЛУАТАЦИИ | 2015 |
|
RU2662121C1 |
| Устройство мониторинга рельсового транспортного средства | 2018 |
|
RU2721219C2 |
Изобретение относится к способу и электронному устройству для контроля состояния деталей рельсового транспортного средства, а также к рельсовому транспортному средству, содержащему указанное устройство. Согласно способу контроля состояния деталей (1) рельсового транспортного средства используются датчики (2а-2с) для регистрации воздействующих на детали (1) нагрузок. Измеренные значения нагрузок в качестве входных значений подаются к блоку обработки (6) для анализа состояния износа деталей (1), причем для этого посредством обработки сигналов определяется текущее местоположение рельсового транспортного средства, и текущая скорость (v) рельсового транспортного средства записывается по времени (t), на основе чего создается v-t-профиль (а). Указанный профиль сравнивается с хранящимся в памяти v-t-профилем, чтобы за счет стохастического сравнения обоих профилей (а, b) определить текущее местоположение в качестве дополнительного входного значения для контроля состояния. В результате данные о местоположении получаются просто и надежно. 2 н. и 8 з.п. ф-лы, 2 ил.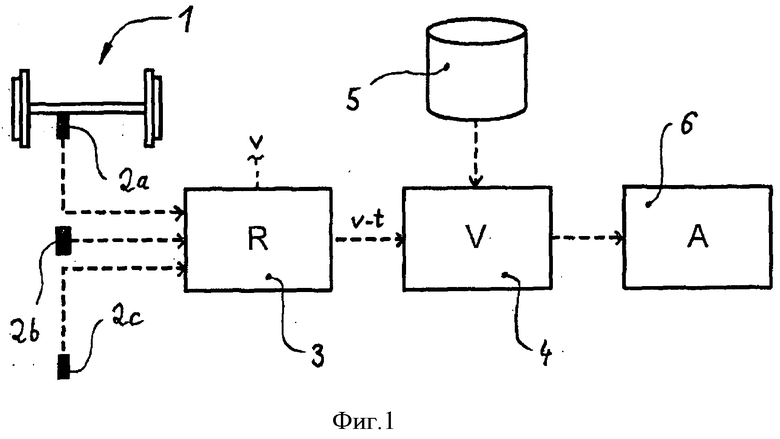
1. Способ контроля состояния деталей (1) рельсового транспортного средства, при котором используют датчики (2а-2с) для регистрации воздействующих на детали (1) нагрузок, измеренные значения которых в качестве входных значений подают к блоку обработки (6) для анализа состояния износа деталей (1), при этом посредством обработки сигналов определяют текущее местоположение рельсового транспортного средства, отличающийся тем, что текущую скорость (v) рельсового транспортного средства записывают по времени (t) и создают v-t-профиль (а), который коррелируют с хранящимся в памяти v-t-профилем, затем посредством стохастического сравнения обоих профилей (а, b) определяют текущее местоположение в качестве дополнительного входного значения для контроля состояния.
2. Способ по п.1, отличающийся тем, что корреляцию осуществляют с хранящимся в памяти v-t-профилем в виде профиля (b) участка пути/остановки.
3. Способ по п.2, отличающийся тем, что сравнение обоих профилей (а, b) осуществляют с помощью временной последовательности местоположений остановок, в которых скорость в течение определенного времени равна нулю.
4. Способ по п.1, отличающийся тем, что хранящемуся в памяти v-t-профилю назначают дополнительные, полученные посредством датчиков (2а-2с), воздействующие на детали (1) нагрузочные данные.
5. Способ по п.4, отличающийся тем, что в качестве дополнительных нагрузочных данных записывают воздействующие на колесные пары рельсового транспортного средства ускорения для идентифицирования дефектных отрезков участка пути.
6. Электронное устройство для контроля состояния деталей (1) рельсового транспортного средства, в котором измеренные датчиками (2а-2с) для регистрации воздействующих на детали (1) нагрузок значения в качестве входных значений подаются к блоку обработки (6) для анализа состояния износа деталей (1), при этом посредством обработки сигналов определяется текущее местоположение рельсового транспортного средства, отличающееся тем, что блок записи (3) записывает текущую скорость (v) рельсового транспортного средства по времени (t) и создает на основе этого v-t-профиль (а), сравниваемый блоком сравнения (4) с хранящимся в памяти v-t-профилем, причем посредством стохастического сравнения обоих профилей (а, b) определяется текущее местоположение в качестве дополнительного входного значения для контроля состояния посредством блока обработки (6).
7. Устройство по п.6, отличающееся тем, что хранящийся в памяти v-t-профиль является профилем (b) участка пути/остановки.
8. Устройство по п.6 или 7, отличающееся тем, что в качестве блока записи (3) текущей скорости (v) рельсового транспортного средства по времени (t) служит его центральный регистратор данных.
9. Устройство по п.8, отличающееся тем, что хранящийся в памяти v-t-профиль хранится также в регистраторе данных или в блоке обработки (6) для контроля состояния.
10. Рельсовое транспортное средство с электронным устройством по любому из пп.6-9.
| DE 19836081 A1, 17.02.2000 | |||
| СПОСОБ КОРРЕКЦИИ ПОГРЕШНОСТЕЙ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2242392C2 |
| Устройство для определения координаты локомотива | 1990 |
|
SU1832093A1 |
| Способ получения карбоксииндановыхКиСлОТ | 1977 |
|
SU795454A3 |

